
Postural Strategies Used While Donning a Simulated xEMU Spacesuit

Abstract
:1. Introduction
2. Materials and Methods
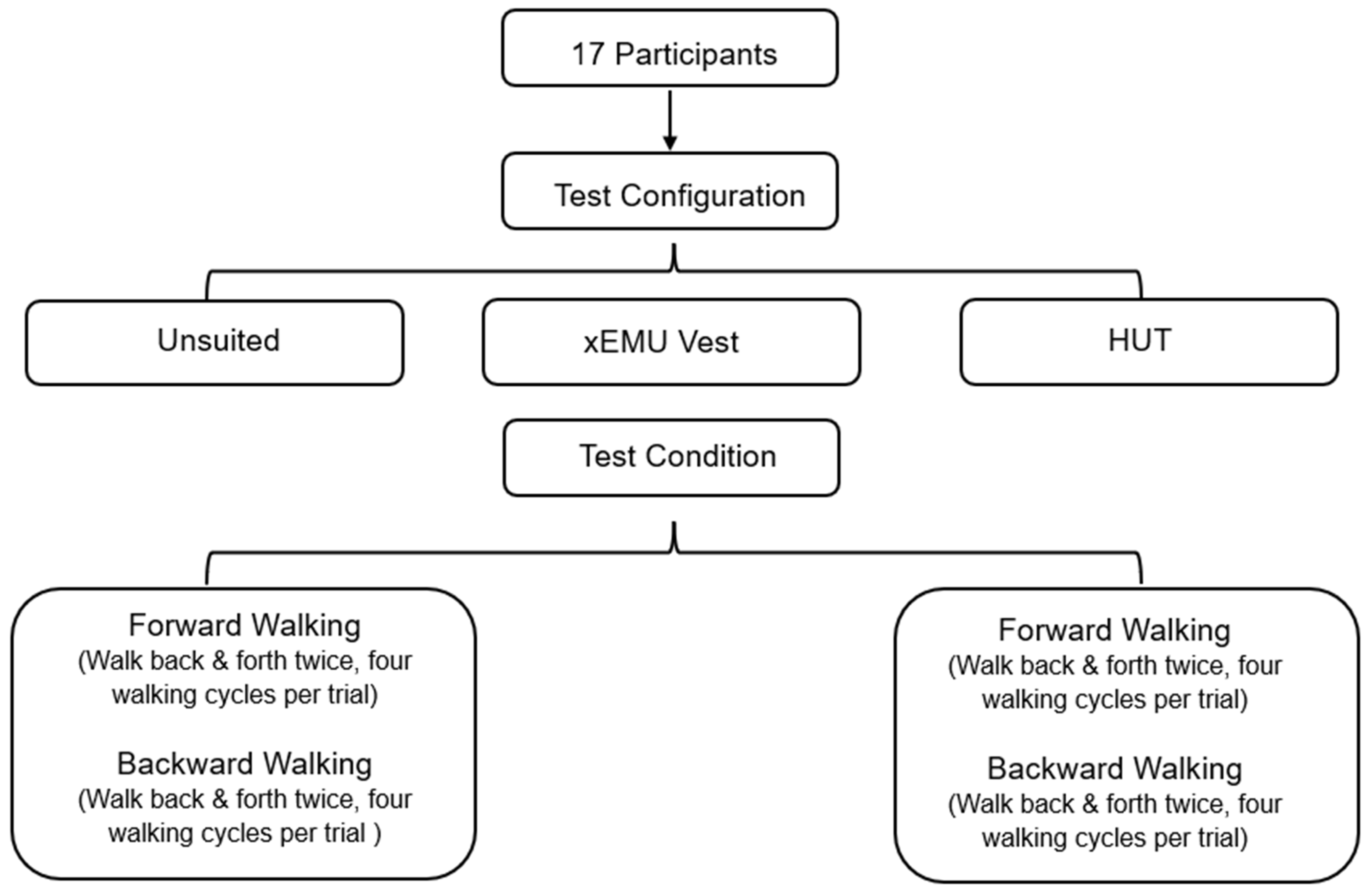
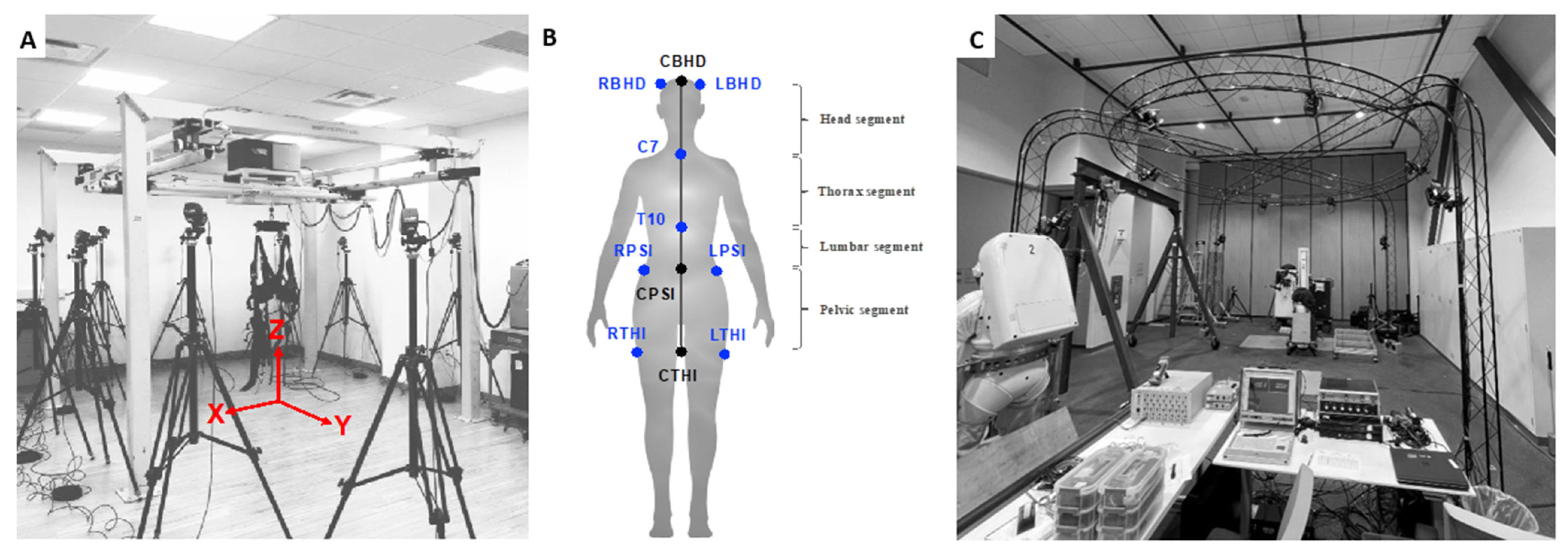
2.1. Experimental Protocol
2.2. Data Analysis
2.3. Statistical Analysis
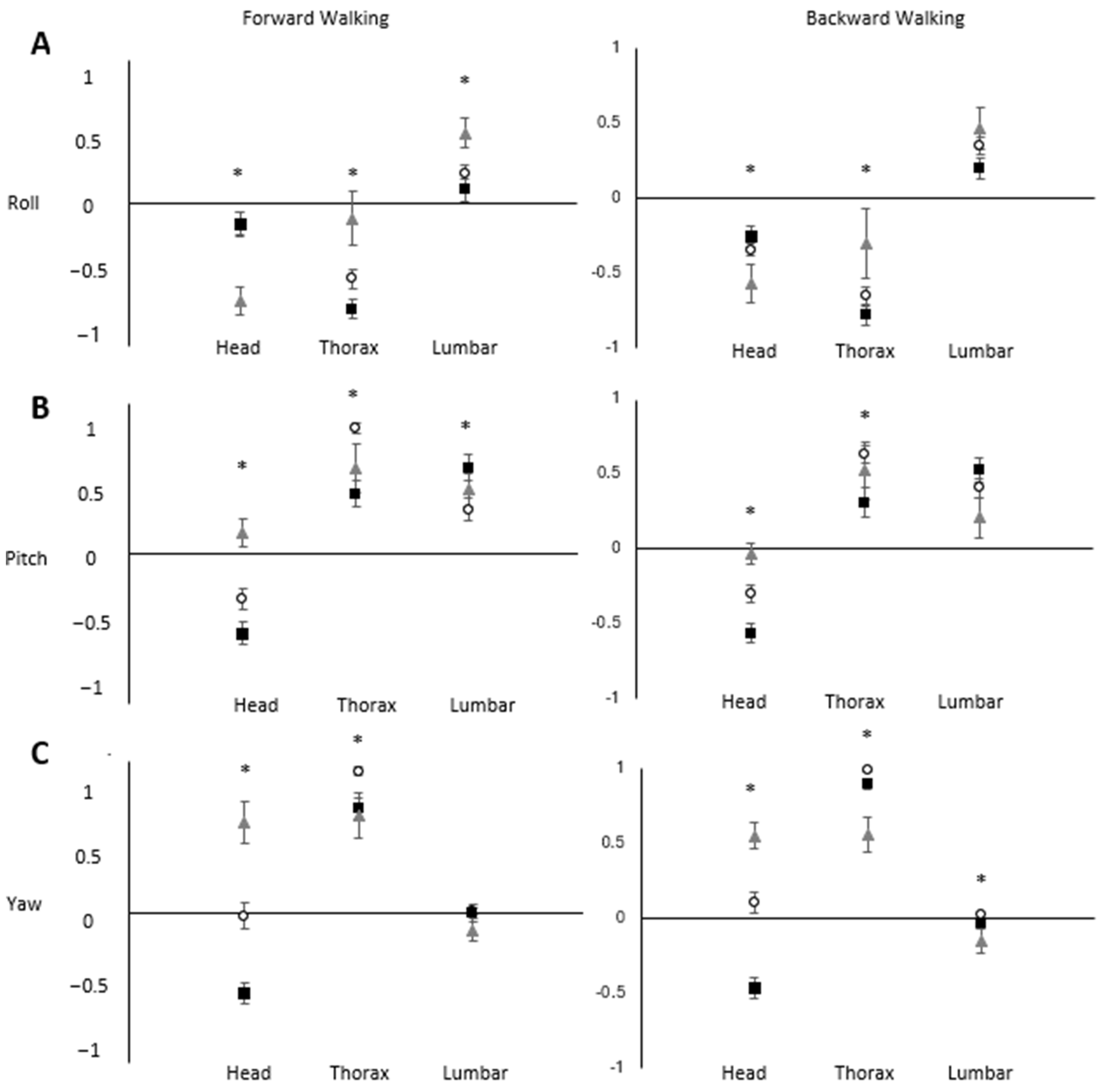
3. Results
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- [CUI] Supporting Data for University of the District of Columbia. NASA. Available online: www.nasa.gov (accessed on 4 February 2022).
- Astronauts Falling on the Moon, NASA Apollo Mission Landed on the Lunar Surface. YouTube, 6 March 2017. Available online: https://www.youtube.com/watch?v=bVNTNeNMH8Q (accessed on 21 September 2023).
- Apollo Surface Experiments—NASA RPS: Radioisotope Power Systems. NASA, 2 August 2021. Available online: https://science.nasa.gov/planetary-science/programs/radioisotope-power-systems/missions/ (accessed on 21 September 2024).
- 2020 EVA System Maturation Team Gap List. NASA. Available online: https://www.nasa.gov/sites/default/files/atoms/files/2020_eva_gap_list.pdf (accessed on 13 May 2021).
- Nadeau, S.; Amblard, B.; Mesure, S.; Bourbonnais, D. Head and trunk stabilization strategies during forward and backward walking in healthy adults. Gait Posture 2003, 18, 134–142. [Google Scholar] [CrossRef] [PubMed]
- Assaiante, C.; Amblard, B. Ontogenesis of head stabilization in space during locomotion in children: Influence of visual cues. Exp. Brain Res. 1993, 93, 499–515. [Google Scholar] [CrossRef] [PubMed]
- Assaiante, C. Development of locomotor balance control in healthy children. Neurosci. Biobehav. Rev. 1998, 22, 527–532. [Google Scholar] [CrossRef] [PubMed]
- Shin, S.H.; Lee, M.Y. Effect of gait training with additional weight on balance and gait in stroke patients. Phys. Ther. Rehabil. Sci. 2014, 3, 55–62. [Google Scholar] [CrossRef]
- Maaswinkel, E.; Griffioen, M.; Perez, R.; van Dieën, J. Methods for assessment of trunk stabilization, a systematic review. J. Electromyogr. Kinesiol. 2016, 26, 18–35. [Google Scholar] [CrossRef] [PubMed]
- Pozzo, T.; Levik, Y.; Berthoz, A. Head and trunk movements in the frontal plane during complex dynamic equilibrium tasks in humans. Exp. Brain Res. 1995, 106, 327–338. [Google Scholar] [CrossRef] [PubMed]
- Ting, L.H.; McKay, J.L. Neuromechanics of muscle synergies for posture and movement. Curr. Opin. Neurobiol. 2007, 17, 622–628. [Google Scholar] [CrossRef] [PubMed]
- Melendez, R.A.R.; Thompson, L.A. Investigating the Effects of Center of Gravity (CoG) Shift Due to a Simulated Exploration Extravehicular Mobility Unit (xEMU) Suit on Balance. Appl. Sci. 2024, 14, 4032. [Google Scholar] [CrossRef]
- Thompson, L.A.; Melendez, R.A.R.; Chen, J. Investigating Biomechanical Postural Control Strategies in Healthy Aging Adults and Survivors of Stroke. Biomechanics 2024, 4, 153–164. [Google Scholar] [CrossRef]
- Pedrocchi, A.; Pedotti, A.; Baroni, G.; Massion, J.; Ferrigno, G. Inverse dynamic investigation of voluntary trunk movements in weightlessness: A new microgravity-specific strategy. J. Biomech. 2003, 36, 1691–1700. [Google Scholar] [CrossRef] [PubMed]
- Viel, S.; Vaugoyeau, M.; Assaiante, C. Postural Adaptation of the Spatial Reference Frames to Microgravity: Back to the Egocentric Reference Frame. PLoS ONE 2010, 5, e10259. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Config. Comparison | Head Pitch | Thorax Pitch | Lumbar Pitch | Pelvis Pitch | Head Yaw | Thorax Yaw | Lumbar Yaw | Pelvis Yaw |
|---|---|---|---|---|---|---|---|---|
| Forward Walking | ||||||||
| Unsuited xEMU | 2.32 | 2.15 | 1.59 | 1.561 | −3.449 | 4.573 | −6.23 | 3.22 |
| 2.253 | 1.991 | 1.682 | 1.464 | 1.013 | 3.637 | 4.307 | 2.481 | |
| Unsuited HUT | 2.32 | 2.15 | 1.59 | 1.561 | −3.449 | 4.573 | −6.23 | 3.22 |
| 2.844 | −0.656 | −0.004 | −0.694 | −10.593 | −5.93 | 2.76 | −1.004 | |
| xEMU HUT | 2.253 | 1.991 | 1.682 | 1.464 | 1.013 | 3.637 | 4.307 | 2.481 |
| 2.844 | −0.656 | −0.004 | −0.694 | −10.593 | −5.93 | 2.76 | −1.004 | |
| Backward Walking | ||||||||
| Unsuited xEMU | 2.267 | 1.877 | 1.432 | 1.37 | 0.884 | 2.871 | −7.115 | 3.192 |
| 2.054 | 2.052 | 1.401 | 1.039 | 2.375 | 3.167 | 4.678 | 3.328 | |
| Unsuited HUT | 2.267 | 1.877 | 1.432 | 1.37 | 0.884 | 2.871 | −7.115 | 3.192 |
| −13.6 | −1.754 | −0.214 | −0.268 | −3.551 | 11.209 | 12.656 | −0.888 | |
| xEMU HUT | 2.267 | 2.052 | 1.401 | 1.039 | 2.375 | 3.167 | 4.678 | 3.328 |
| −13.6 | −1.754 | −0.214 | −0.268 | −3.551 | 11.209 | 12.656 | −0.888 | |
 p = 0.01 < 0.05,
p = 0.01 < 0.05,  p = 0.001 < 0.01,
p = 0.001 < 0.01,  p = 0.0001 < 0.001.
p = 0.0001 < 0.001.| Config. Comparison | Head Roll | Thorax Roll | Lumbar Roll | Head Pitch | Thorax Pitch | Lumbar Pitch | Head Yaw | Thorax Yaw | Lumbar Yaw |
|---|---|---|---|---|---|---|---|---|---|
| Forward Walking | |||||||||
| Unsuited xEMU | −0.147 | −0.536 | 0.199 | −0.306 | 0.840 | 0.292 | −0.023 | 0.938 | 0.007 |
| −0.152 | −0.747 | 0.0866 | −0.535 | 0.399 | 0.572 | −0.538 | 0.688 | −0.005 | |
| Unsuited HUT | −0.147 | −0.536 | 0.199 | −0.306 | 0.840 | 0.292 | −0.023 | 0.938 | 0.007 |
| −0.689 | 0.109 | 0.489 | 0.14 | 0.57 | 0.425 | 0.595 | 0.645 | −0.115 | |
| xEMU HUT | −0.152 | −0.747 | 0.087 | −0.535 | 0.399 | 0.572 | −0.538 | 0.688 | −0.005 |
| −0.689 | 0.109 | 0.489 | 0.14 | 0.57 | 0.425 | 0.595 | 0.645 | −0.115 | |
| Backward Walking | |||||||||
| Unsuited xEMU | −0.346 | −0.649 | 0.346 | −0.299 | 0.636 | 0.407 | 0.107 | 0.995 | 0.025 |
| −0.255 | −0.783 | 0.197 | −0.566 | 0.313 | 0.527 | −0.464 | 0.900 | −0.037 | |
| Unsuited HUT | −0.346 | −0.649 | 0.346 | −0.299 | 0.636 | 0.407 | 0.107 | 0.995 | 0.025 |
| −0.573 | −0.303 | 0.462 | −0.033 | 0.523 | 0.212 | 0.552 | 0.56 | −0156 | |
| xEMU HUT | −0.255 | −0.783 | 0.197 | −0.566 | 0.313 | 0.527 | −0.464 | 0.900 | −0.037 |
| −0.573 | −0.303 | 0.462 | −0.033 | 0.523 | 0.212 | 0.552 | 0.56 | −0156 | |
p = 0.01 < 0.05, p = 0.001 < 0.01, p = 0.0001 < 0.001.Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Romero Melendez, R.A.; Thompson, L.A. Postural Strategies Used While Donning a Simulated xEMU Spacesuit. Appl. Sci. 2024, 14, 8773. https://doi.org/10.3390/app14198773
Romero Melendez RA, Thompson LA. Postural Strategies Used While Donning a Simulated xEMU Spacesuit. Applied Sciences. 2024; 14(19):8773. https://doi.org/10.3390/app14198773
Chicago/Turabian StyleRomero Melendez, Roni A., and Lara A. Thompson. 2024. "Postural Strategies Used While Donning a Simulated xEMU Spacesuit" Applied Sciences 14, no. 19: 8773. https://doi.org/10.3390/app14198773
APA StyleRomero Melendez, R. A., & Thompson, L. A. (2024). Postural Strategies Used While Donning a Simulated xEMU Spacesuit. Applied Sciences, 14(19), 8773. https://doi.org/10.3390/app14198773