
Design and Validation of a Long-Range Streak-Tube Imaging Lidar System with High Ranging Accuracy
 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
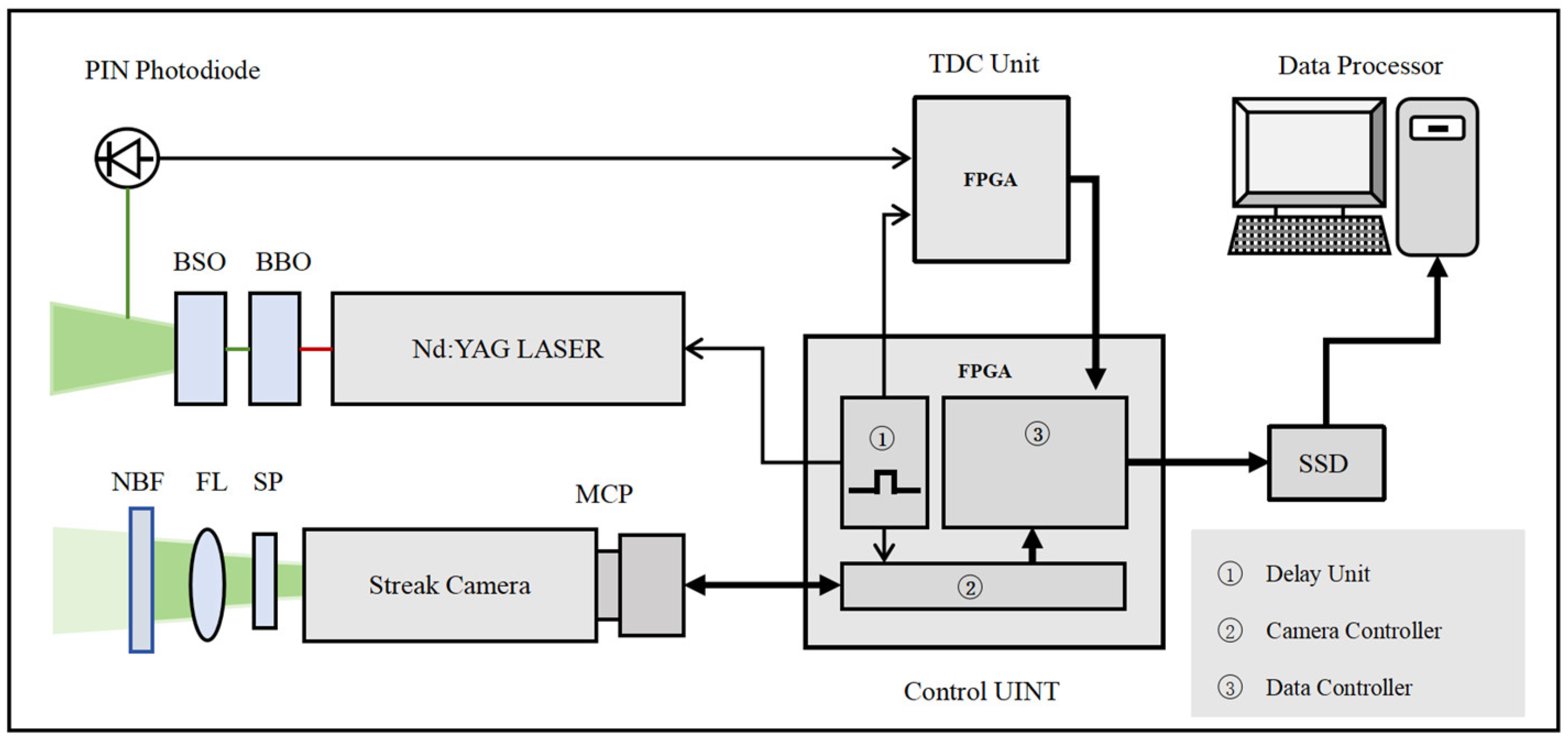
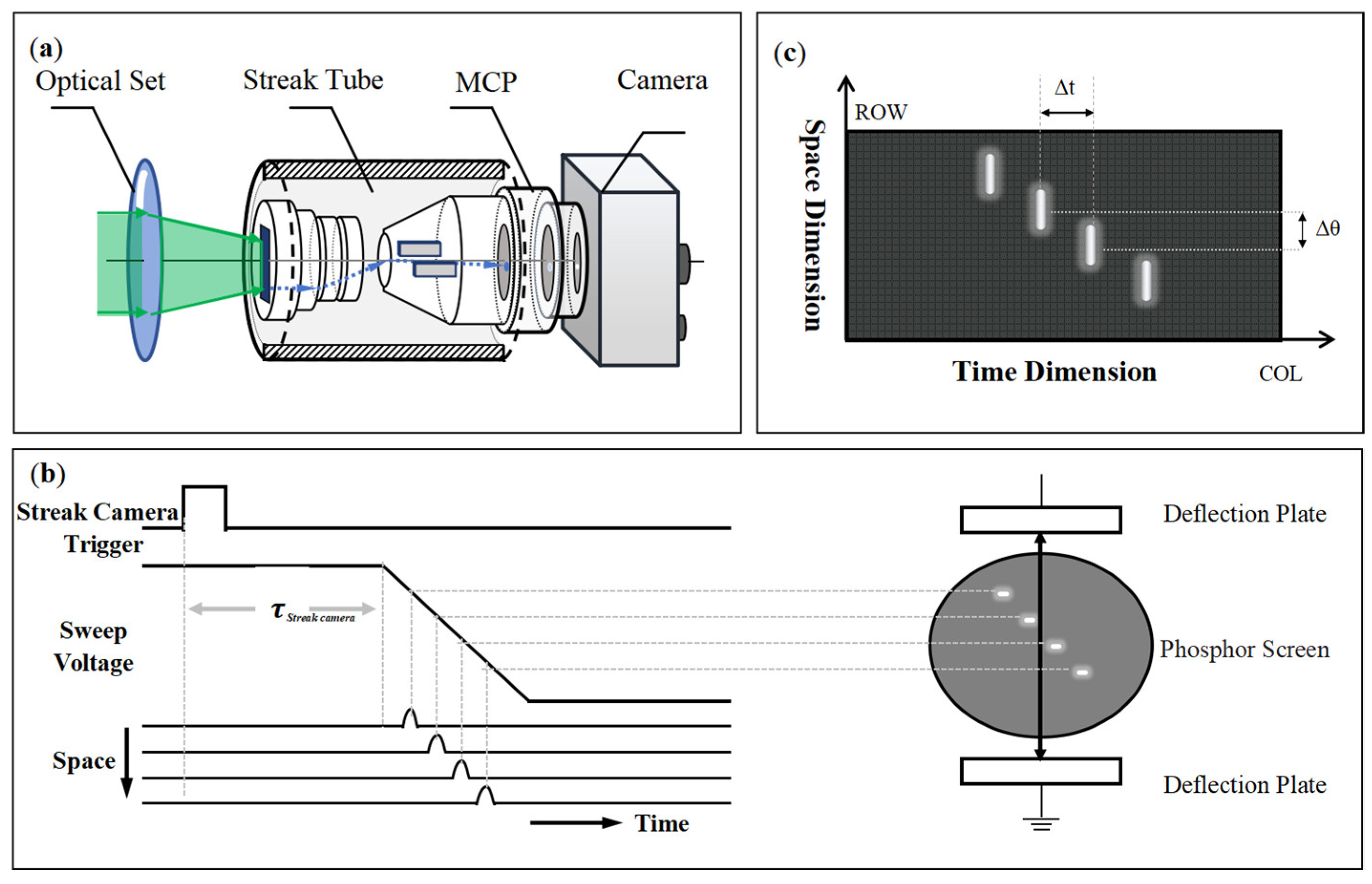
2.1. STIL System Structure
2.2. STIL Ranging Data Processing
- Streak camera temporal information calibration
- 2.
- Extraction of Echo Feature Points
- 3.
- Streak echo temporal information extraction
- 4.
- Ranging Data Fusion
- 5.
- Intrinsic Delay Calibration and Environmental Delay Calibration
2.3. Ground Tests
3. Results
3.1. Laser Far-Field Characteristics Analysis
3.2. Streak Images Processing Accuracy
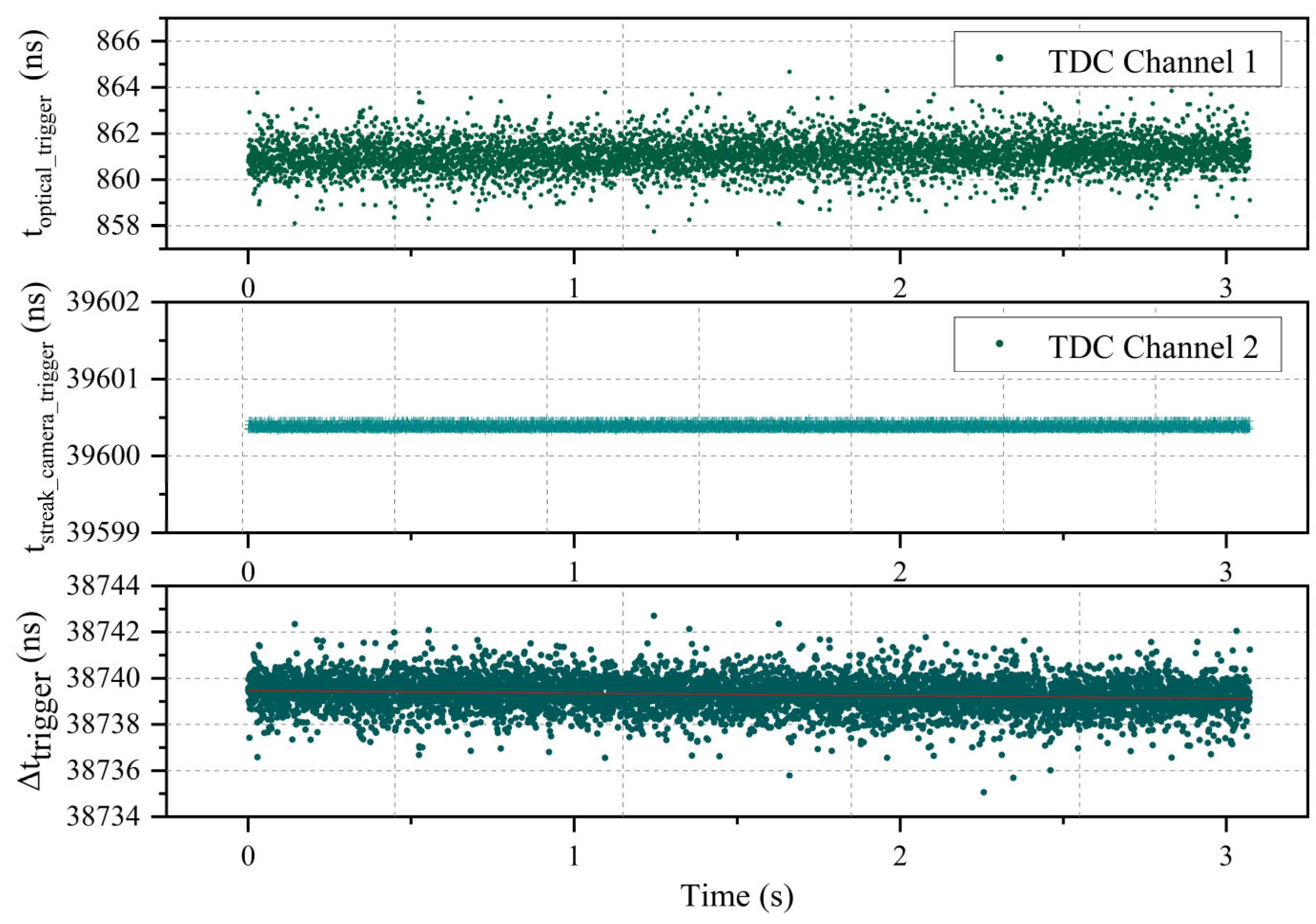
3.3. TDC Measurement Accuracy
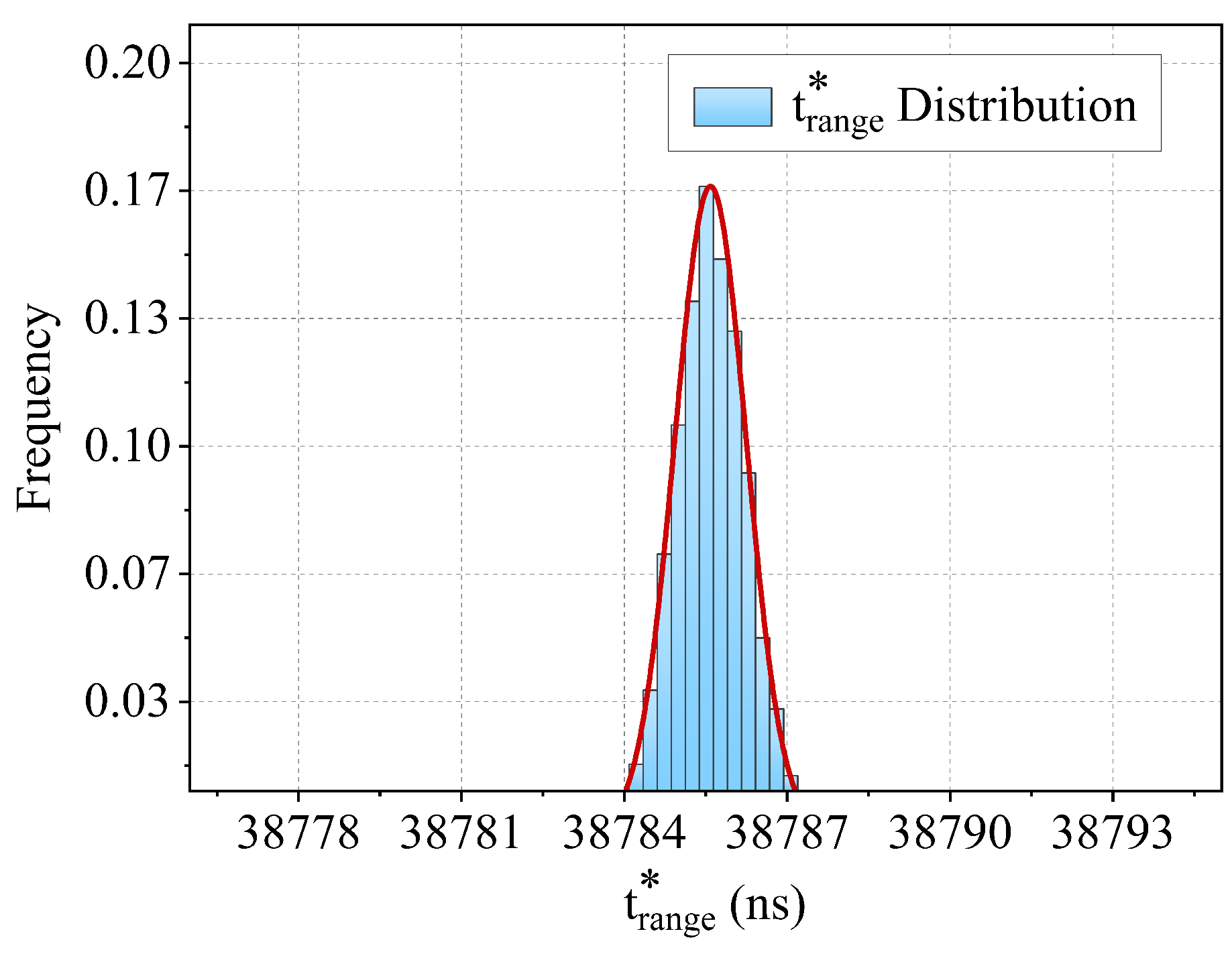
3.4. STIL Ranging Accuracy
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, Z.P.; Ye, J.T.; Huang, X.; Jiang, P.Y.; Cao, Y.; Hong, Y.; Yu, C.; Zhang, J.; Zhang, Q.; Peng, C.Z.; et al. Single-photon imaging over 200 km. Optica 2021, 8, 344–349. [Google Scholar] [CrossRef]
- Jian, W.; Zhi, L.; Wei, W.; Fang, Z.; Jian, C.; Yu, W.; Wei, Z. Long-distance ranging with high precision using a soliton microcomb. Photonics Res. 2020, 8, 1964–1972. [Google Scholar]
- Jian, Y.; Bo, Z.; Bin, L. Distance and Velocity Measurement of Coherent Lidar Based on Chirp Pulse Compression. Sensors 2019, 19, 2313. [Google Scholar] [CrossRef] [PubMed]
- Yu, Z.; Lu, C.; Liu, G. FMCW LiDAR with an FM nonlinear kernel function for dynamic-distance measurement. Opt. Express 2022, 30, 19582–19596. [Google Scholar]
- Asher, G.; Brian, C.R.; Robert, S.L.; Coreen, A.S.; Andrew, J.G. Flash lidar based on multiple-slit streak tube imaging lidar. In Laser Radar Technology and Applications VII; Proceedings Volume 4723; SPIE: Bellingham, WA, USA, 29 July 2002. [Google Scholar]
- John, W.M. High-resolution 3D underwater imaging. In Airborne and In-Water Underwater Imaging; Proceedings Volume 3761; SPIE: Bellingham, WA, USA, 28 October 1999. [Google Scholar]
- Li, G.; Zhou, Q.; Xu, G.; Wang, X.; Han, W.; Wang, J.; Zhang, G.; Zhang, Y.; Song, S.; Gu, S.; et al. Lidar-radar for underwater target detection using a modulated sub-nanosecond Q-switched laser. Opt. Laser Technol. 2021, 142, 107234. [Google Scholar] [CrossRef]
- Gao, J.; Sun, J.; Wang, Q.; Cong, M. 4-D imaging of the short scale ocean waves using a slit streak tube imaging Lidar. Optik 2017, 136, 136–143. [Google Scholar] [CrossRef]
- Cui, Z.; Tian, Z.; Zhang, Y.; Bi, Z.; Fu, S. Study on real time 3D imaging of streak tube lidar based on LabVIEW. Optik 2018, 157, 768–773. [Google Scholar] [CrossRef]
- Tian, L.; Li, L.; Wen, W.; Xang, X.; Chen, P.; Lu, L.; Wang, J.-F.; Zhao, W.; Tian, J.-S. Numerical calculation and experimental study on the small-size streak tube. Acta Phys. Sin. 2018, 67, 188501. [Google Scholar] [CrossRef]
- Hui, D.; Luo, D.; Tian, L.; Lu, Y.; Chen, P.; Wang, J.; Sai, X.; Wen, W.; Wang, X.; Xin, L.; et al. A compact large-format streak tube for imaging lidar. Rev. Sci. Instrum. 2018, 89, 045113. [Google Scholar] [CrossRef]
- Fang, M.; Qiao, K.; Yin, F.; Xue, Y.; Chang, Y.; Su, C.; Wang, Z.; Tian, J.; Wang, X. Streak tube imaging lidar with kilohertz laser pulses and few-photons detection capability. Opt. Express 2024, 32, 19042–19056. [Google Scholar] [CrossRef]
- Li, H.; Xue, Y.; Tian, J.; Li, S.; Wang, J.; Chen, P.; Tian, L.; He, J.; Zhang, M.; Liu, B. A large-format streak tube for compressed ultrafast photography. Rev. Sci. Instrum. 2022, 93, 113303. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Tian, J.; Xue, Y.; Li, Z.; Li, S.; Wang, J.; Liu, B.; Gao, G.; Chen, P.; Wang, X.; et al. High-gain Ultra-small Streak Camera and Its Integrated Control System. Acta Photonica Sin. 2022, 51, 1032003. [Google Scholar]
- Guo, S.; Li, W.; Lai, Z.; Han, S.; Zhai, Y.; Liu, F. Differential optical-path approach to improving the performance of Multiple-Slit Streak Tube Imaging LiDAR. Measurement 2021, 172, 108947. [Google Scholar] [CrossRef]
- Li, W.; Guo, S.; Zhai, Y.; Liu, F.; Lai, Z.; Han, S. Denoising of the multi-slit streak tube imaging LiDAR system using a faster non-local mean method. Appl. Opt. 2021, 60, 10520–10528. [Google Scholar] [CrossRef]
- Luo, T.; Fan, R.; Chen, Z.; Wang, X.; Dong, C.; Chen, D. Comparison of four deblurring methods for streak image of streak tube imaging lidar. OSA Contin. 2020, 3, 2863–2879. [Google Scholar] [CrossRef]
- Yuan, Q.; Niu, L.; Hu, C.; Wu, L.; Yang, H.; Yu, B. Target 3-D reconstruction of streak tube imaging lidar based on Gaussian fitting. In Fourth Seminar on Novel Optoelectronic Detection Technology and Application; Proceedings Volume 10697; SPIE: Bellingham, WA, USA, 2018; p. 106970R. [Google Scholar]
- Dong, Z.; Sun, L.; Tan, S.; Xu, T.; Gao, R.; Chen, D. Homogenization research of waveform sampling LiDAR point cloud data. In Three-Dimensional Image Acquisition and Display Technology and Applications; Proceedings Volume 10845; SPIE: Bellingham, WA, USA, 2018; p. 1084502. [Google Scholar]
- Shen, H.; Dong, Z.; Yan, Y.; Fan, R.; Jiang, Y.; Chen, Z.; Chen, D. Building roof extraction from ASTIL echo images applying OSA-YOLOv5s. Appl. Opt. 2022, 61, 2923–2928. [Google Scholar] [CrossRef]
- Ye, G.; Fan, R.; Lu, W.; Dong, Z.; Li, X.; He, P.; Chen, D. Depth resolution improvement of streak tube imaging lidar using optimal signal width. Opt. Eng. 2016, 55, 103112. [Google Scholar] [CrossRef]
- Bi, Z.; Cui, Z.; Zhang, Y.; Tian, Z. Design of precise delay system for streak tube imaging lidar. Opt. Eng. 2018, 57, 124104. [Google Scholar] [CrossRef]
- Hui, D.; Tian, J.; Lu, Y.; Wang, J.; Wen, W.; Liang, L.; Chen, L. Temporal distortion analysis of the streak tube. Acta Phys. Sin. 2016, 65, 158502. [Google Scholar]
- Chen, Z.; Shao, F.; Fan, Z.; Wang, X.; Dong, C.; Dong, Z.; Fan, R.; Chen, D. A Calibration Method for Time Dimension and Space Dimension of Streak Tube Imaging Lidar. Appl. Sci. 2023, 13, 10042. [Google Scholar] [CrossRef]
- Ye, G.; Fan, R.; Chen, Z.; Yuan, W.; Chen, D.; He, P. Range accuracy analysis of streak tube imaging lidar systems. Opt. Commun. 2016, 360, 7–14. [Google Scholar] [CrossRef]
- Wang, X.; Chen, Z.; Dong, C.; Dong, Z.; Chen, D.; Fan, R. High Accuracy Reconstruction of Airborne Streak Tube Imaging LiDAR Using Particle Swarm Optimization. Appl. Sci. 2024, 14, 6843. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Extreme Value | Threshold Averaging | Gaussian Fitting | Centeroid |
|---|---|---|---|---|
| Time Complexity | O(n) | O(n) | )~O(n2) | O(n) |
| Standard deviation (pixels) | 2.92 | 1.64 | 1.42 | 0.78 |
| Ranging Data | |||
|---|---|---|---|
| Mean value (ns) | 46.3 | 38,739.3 | 38,785.6 |
| Standard deviation (ns) | 0.93 | 0.70 | 0.65 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, C.; Chen, Z.; Fan, Z.; Wang, X.; Cao, L.; Hao, P.; Dong, Z.; Fan, R.; Chen, D. Design and Validation of a Long-Range Streak-Tube Imaging Lidar System with High Ranging Accuracy. Appl. Sci. 2024, 14, 8835. https://doi.org/10.3390/app14198835
Dong C, Chen Z, Fan Z, Wang X, Cao L, Hao P, Dong Z, Fan R, Chen D. Design and Validation of a Long-Range Streak-Tube Imaging Lidar System with High Ranging Accuracy. Applied Sciences. 2024; 14(19):8835. https://doi.org/10.3390/app14198835
Chicago/Turabian StyleDong, Chaowei, Zhaodong Chen, Zhigang Fan, Xing Wang, Lansong Cao, Pengfei Hao, Zhiwei Dong, Rongwei Fan, and Deying Chen. 2024. "Design and Validation of a Long-Range Streak-Tube Imaging Lidar System with High Ranging Accuracy" Applied Sciences 14, no. 19: 8835. https://doi.org/10.3390/app14198835