Abstract
This study presents the design and a thorough analysis of a six-bar crank-driven leg mechanism integrated with a skew pantograph, developed for walking robots. The mechanism’s dimensions were optimized using a rigorous dimensional synthesis process in GIM software (version 2024). Subsequently, a detailed kinematic analysis was performed in GIM to simulate the leg’s motion trajectory, velocity, and acceleration. In parallel, kinematic equations were formulated using the vector loop method, implemented in MATLAB (version R2013-b), and compared with the GIM results for validation, demonstrating the strong agreement between both tools. These results confirm the mechanism’s ability to generate a compact, high-lift foot trajectory while maintaining system stability and energy efficiency. An inverse dynamic analysis was carried out to determine the actuator’s driving torque, ensuring efficient operation under expected load conditions. Furthermore, topology optimization conducted in SOLIDWORKS (version 2021) significantly reduced the weight of the ground-contacting link while preserving its structural integrity. A subsequent stress analysis validated the mechanical viability of the optimized design, supporting its feasibility for real-world implementation. This research provides a robust foundation for the development of a functional prototype. Its potential applications include mobile robots for sectors such as agriculture and all-terrain vehicles, where efficient, reliable, and adaptive locomotion is crucial. The proposed mechanism strikes an optimal balance between mechanical simplicity, cost-effectiveness, and high performance, making it well-suited for challenging operational environments.
1. Introduction
In recent times, the growing integration of robots into daily life has emerged as a fascinating field for research and development. This growth has prompted many to focus on enhancing automated machines for various purposes. Over the years, advancements in science and technology have transformed robotics from a concept of fiction into a tangible reality, especially in terms of robot design and manufacturing. Various disciplines, including computer science, medical applications, engineering, and automation, have significantly contributed to the progress made in robotics [1,2,3].
A walking machine is characterized by its ability to move over soft or hard surfaces using limbs, legs, and/or wheels at low speeds. NASA has extensively researched the design and development of these machines for planetary exploration since the 1960s [1]. Depending on the terrain, NASA has developed three primary types of walking machines: wheeled, tracked, and legged robots. These versatile machines are utilized in various fields, including planetary exploration, medical applications, engineering, and agriculture, to enhance or substitute human efforts [4,5,6].
Among the diverse leg mechanisms utilized in walking machines, the Klann mechanism and Jansen’s linkage stand out for their widespread application. The Klann mechanism [7,8,9], a pivotal example of an eight-bar kinematic chain, replicates the locomotion of legged animals and serves as an alternative to traditional wheels. It comprises a frame, cranks, a pair of grounded rockers, and two couplers connected by pivot joints. This design offers notable benefits for walking machines, such as the ability to move over obstacles like curbs and stairs and access areas challenging for wheeled mechanisms without the need for sophisticated control systems or extensive actuation devices. In their research paper, Rafeeq et al. [9] designed and modeled a paired four-legged amphibious robot capable of walking on land and swimming in water. They utilized an optimized Klann linkage mechanism for the robot’s legs. Their kinematic analysis and inverse dynamic analysis, conducted using a SAM (Simulation and Analysis of Mechanisms), confirmed that the Klann mechanism provided a horizontal foot trajectory, resulting in higher propulsion compared to a four-bar mechanism. The study demonstrated the robot’s capability to maneuver effectively on different surfaces. The Klann mechanism was found to be more efficient and provided better propulsion and speed performance.
The Jansen linkage [7,8,9,10], renowned for its ability to produce a fluid walking motion, ingeniously transforms a simple rotational input into a lifelike stepping pattern. This mechanism, characterized by its single degree of freedom (DOF) and an eleven-link leg configuration, adeptly converts the circular motion of a crank into the linear gait of a walk. Its design is both scalable and energy-efficient, offering a low payload capacity while ensuring a predictable path for each footstep. The key advantages of the Jansen mechanism are its simplicity and effectiveness, making it a preferred choice for implementing walking motions in the field of legged robotics.
Recently, Wu et al. [11] introduced the development of a novel closed-chain elastic-bionic leg (CEL) mechanism, which incorporates a single actuated DOF inspired by the spring-loaded inverted pendulum (SLIP) model. This innovation aims to improve the efficiency of leg mechanisms in robotic applications, focusing on simple control, enhanced stiffness, and the capability for full rotation driving. The design features an eight-bar linkage that mimics the muscular and skeletal structure of a cheetah’s leg, targeting optimal performance in high-speed conditions. By employing a kinematic analysis, their study establishes a link between foot trajectory, ground reaction forces, and driving forces, further examining the stiffness changes in the support phase using an equivalence model. Simulation efforts were undertaken to evaluate key parameters such as movement velocity, spring deformation, and the dynamics of running gait, leading to prototype creation and treadmill testing. This research demonstrates the potential of applying biomechanical insights to the design of robotic leg mechanisms, specifically for achieving efficient high-speed locomotion.
Additionally, a new study [12] presented the design of a 12-link single-leg walking mechanism for a single-DOF quadruped robot, focusing on simplicity, easy implementation, and minimal driving components. The mechanism features a series of crank-rocker and scaling mechanisms to achieve an “inverted D” walking gait trajectory, reducing the degrees of freedom and enhancing stability. An auxiliary mechanism improves its load-bearing capacity and motion stability, while a unique sole structure increases the contact area with the ground, supporting the lightweight design. The analytical expression of its foot displacement was derived, providing a foundation for dynamic analysis. Simulations using ADAMS software verified that the design meets motion requirements and stability, demonstrating its feasibility and reliability for engineering applications.
Additionally, Desai et al. [7] presented an eight-link novel single-degree-of-freedom crank-driven walking leg mechanism designed for walking machines and robots. The mechanism, based on the Peaucellier–Lipkin type, was thoroughly analyzed in terms of its geometry and working principles. The paper detailed various configurations and discussed the kinematic behavior of the leg mechanism. An eight-legged walking machine incorporating this mechanism was also built and tested, with the results showing a good agreement between the simulation and practical application. The leg mechanism’s performance was compared with the Klann and Jansen’s walking mechanisms, highlighting its advantages such as its stability, economical use of legs, compact design, and versatility in its stride length and height adjustments. The study concluded with a discussion on the practical applications of the walking leg mechanism in various fields, including industry, agriculture, and autonomous vehicles, while noting a limitation in positioning the linkage pair in the same plane as Jansen’s and the Klann linkages.
Shieh et al. [13] developed a six-bar leg mechanism that enhances traditional four-bar linkage mechanisms by incorporating a symmetrical coupler point curve. This mechanism combines a four-bar linkage with an additional dyad, forming an embedded regular or skew pantograph. The primary advantage of this design is the amplification of the coupler curve at the output point, resulting in a compact mechanism that generates a relatively large coupler curve. This structural arrangement simplifies the analysis and synthesis process, allowing for the creation of mechanisms tailored to specific needs. The six-bar linkages, with their embedded skew pantographs, offer greater design flexibility compared to typical four-bar mechanisms. The authors highlight the ability of these mechanisms to produce large, symmetrical coupler curves and emphasize their potential in integrating the coupler curves of a four-bar linkage and a pantograph into a single system. However, the foot path generated by Shieh et al.’s mechanism is symmetrical without a flat portion, which limits its direct applicability as a leg mechanism for walking robots.
This paper introduces a new leg mechanism for a robot designed to walk and overcome obstacles that traditional wheeled robots cannot handle. The proposed mechanism is a crank-driven, single-degree-of-freedom design featuring six links and an embedded skew pantograph. The primary objective was to modify the configuration of Shieh et al.’s mechanism to achieve a foot trajectory that includes a flat path in contact with the ground, making it highly suitable for walking robots. This adaptation is particularly beneficial for navigating uneven terrains, such as in climbing robots, where stability and precise foot placement are crucial. The linear foot path improves stability and balance, facilitating the easier control and prediction of foot movements, which are essential for precise and reliable navigation. Additionally, using a six-link leg mechanism offers several advantages over the more complex 8- or 12-link mechanisms. The simpler design and manufacturing process reduce production costs and assembly time, while the reduced weight enhances energy efficiency, which is particularly beneficial for mobile robots. The lower complexity to its control makes the system easier to implement and more reliable, especially in dynamic environments. Furthermore, the six-link mechanism’s higher efficiency and speed, improved robustness, and ease of analysis and optimization contribute to its practicality and effectiveness. Its cost-effectiveness and space efficiency also make it an attractive option for various applications, providing a balanced approach between functionality and simplicity that meets the demands of walking robots.
In this study, GIM software is employed for the dimensional synthesis of the leg mechanism, facilitating the generation of an accurate foot trajectory. Once the mechanism’s dimensions are optimized, a comprehensive kinematic analysis is conducted using GIM to simulate the leg’s motion, including its trajectory, velocity, and acceleration profiles. These simulations provide critical insights into the dynamic behavior of the mechanism. Simultaneously, the kinematic equations of the mechanism are derived using the vector loop method and implemented in MATLAB. These equations are used to calculate positional, velocity, and acceleration data, which are then compared with the GIM simulation results. Then, an inverse dynamic analysis is carried out to determine the actuator’s driving torque, ensuring its efficient operation under expected load conditions. Additionally, SolidWorks is employed for the stress analysis and topology optimization of the leg mechanism. This walking leg mechanism shows significant potential for practical applications across various fields, including industries, all-terrain vehicles, and agriculture, underscoring its impact and versatility in enhancing robotic mobility in challenging environments.
This paper is organized as follows. Section 2 and Section 3 provide a detailed description and the construction of the proposed mechanism, respectively. Section 4, Section 5 and Section 6 cover the kinematic and dynamic modeling of the mechanism. Section 7 presents a comparison of the foot trajectory of this mechanism with existing designs. Section 8 presents the design of a four-legged walking robot and includes a static analysis with topology optimization. Finally, the paper concludes with a discussion of the findings and suggestions for future work.
2. Description of the Proposed Mechanism
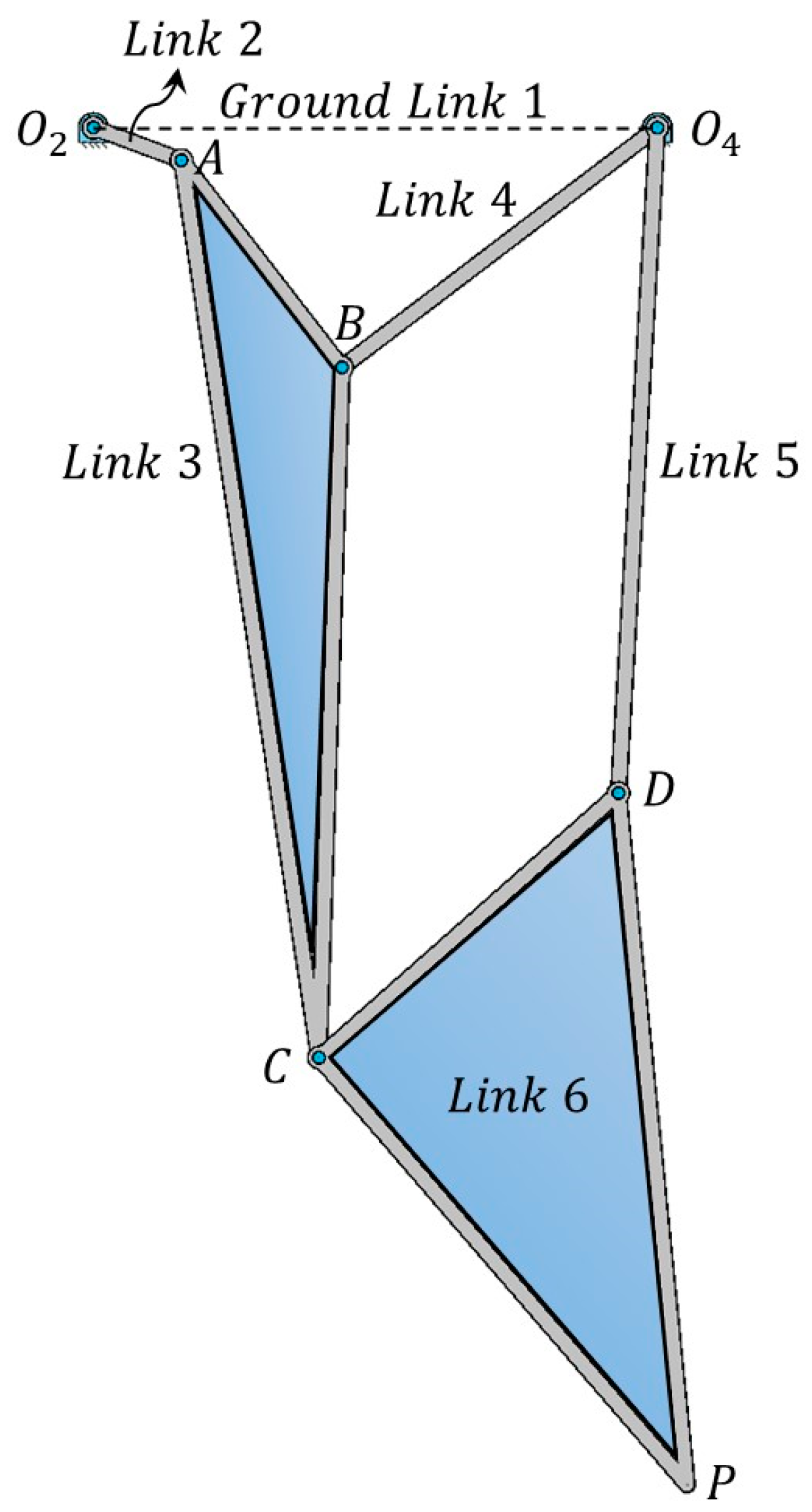
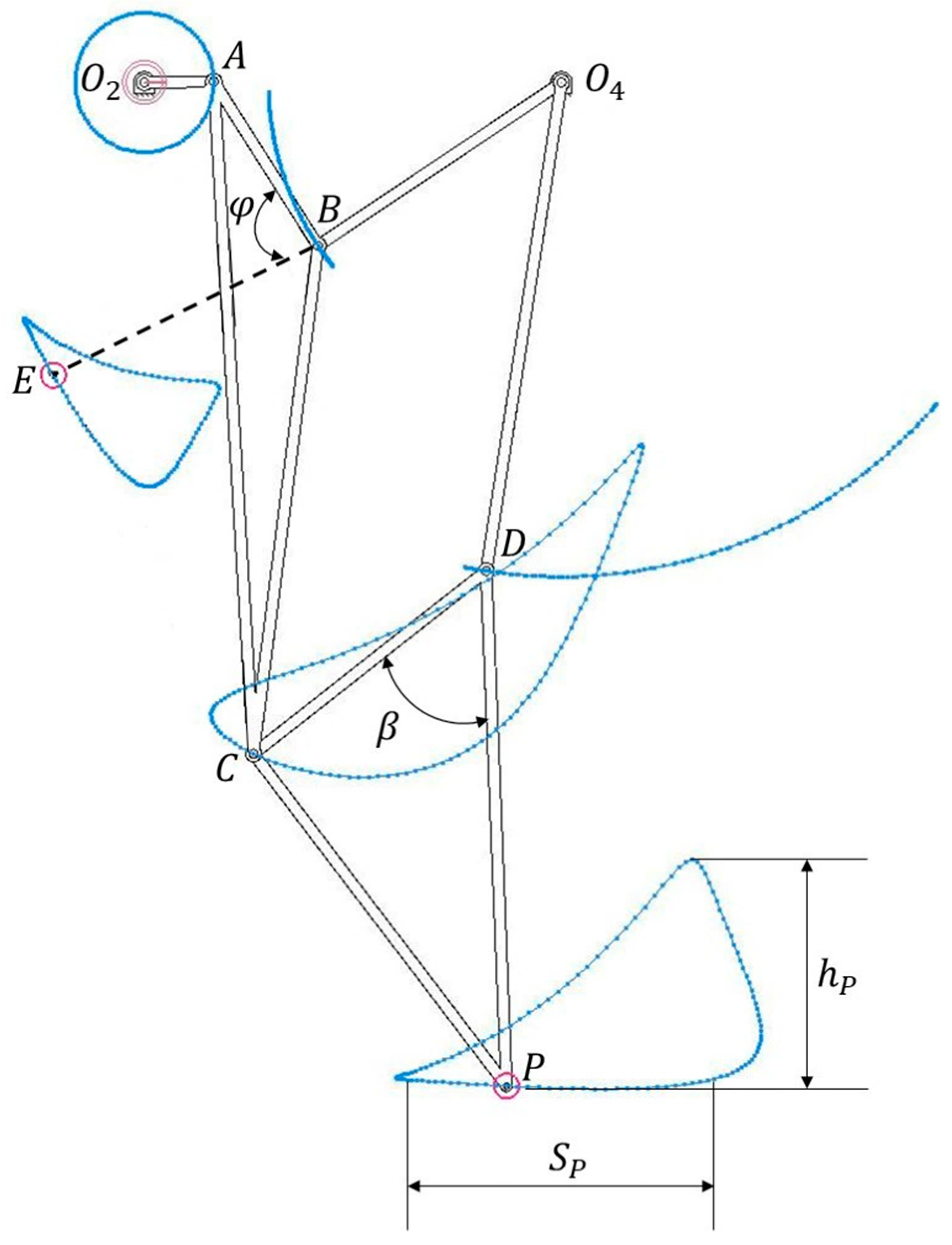
Figure 1 shows the proposed planar single-DOF six-bar mechanism, which includes an integrated skew pantograph. This mechanism represents an advanced kinematic chain that has found extensive application within various engineering domains requiring the precise transmission and scaling of motion. Diverging from the conventional pantograph, this intricate variant incorporates additional linkages that endow it with the capability to trace more complex motion paths, extending its functionality into three-dimensional operations. A notable characteristic of the six-bar skew pantograph is its duality in motion manipulation, whereby it can amplify or reduce input movements through adjustments in the lengths of the bars and their respective motions, a feature crucial in applications requiring varied motion outputs [14]. The precision with which these pantographs operate is imperative, especially in precision engineering contexts where exact replication of motions is demanded; this is achievable through the meticulous design and manufacturing of the mechanism [15,16,17]. Moreover, the versatility of this six-bar linkage is evidenced by its numerous configurations, each tailored to fulfill a wide array of motion profiles, which substantiates its broad applicability across different technological fields [18].
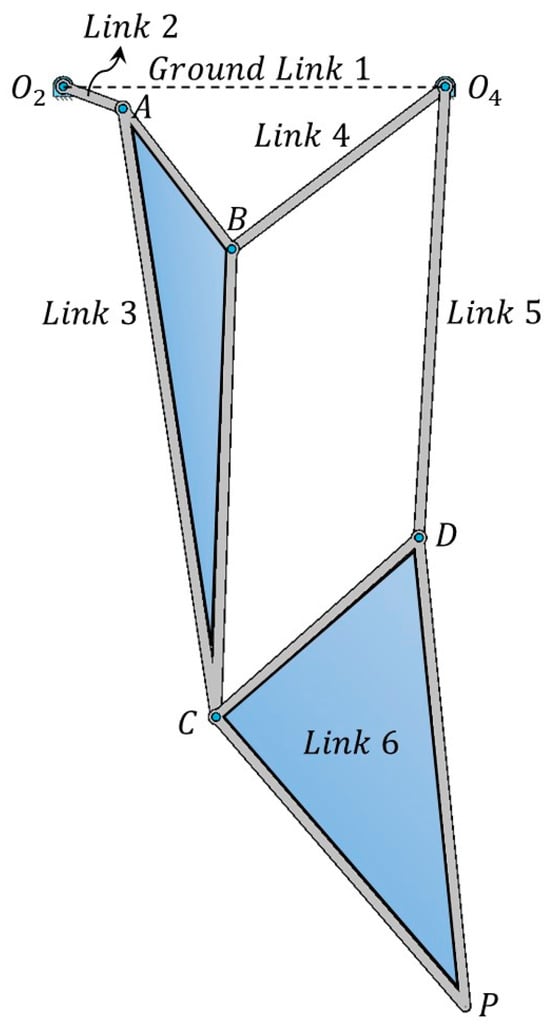
Figure 1.
Scheme of the proposed mechanism.
The main idea behind selecting this design is its capability of generating amplified four-bar coupler curves at its output point. This is particularly useful in applications such as walking machine leg mechanisms, for which a compact mechanism with a relatively large output coupler curve is needed [19]. Additionally, this leg is designed to mimic the trajectory pattern of an amphibious leg, which is characterized by a linear supporting phase.
3. Construction, Dimensional Synthesis, and Working of the Mechanism
As previously mentioned, the proposed mechanism features a foot path with a large height, denoted by (Figure 2). Such an extreme point path facilitates not just the reciprocal motion of the crank link, but also equips a walking machine with the capability to step over obstacles.
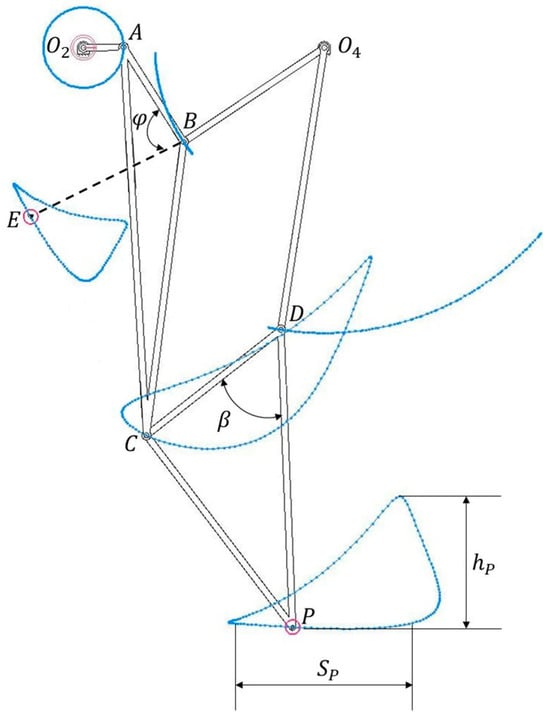
Figure 2.
Construction of skew pantograph mechanism using GIM software.
This mechanism is driven by input link 2 (). The four-bar linkage is denoted as ( while the embedded pantograph is (. The notation of the different link lengths is provided in Table 1.

Table 1.
Link notations and lengths.
Link 6 () serves as an output link with a point of contact P called a foot point. The construction of this leg mechanism is carried out through the following steps:
Construct a four-bar linkage ( such that . The triangular coupler is , where (Note that is a design variable).
Add a binary link such that (Note that is the amplification factor while the orientation of the link determines the orientation of the output curve).
Form a four-bar parallelogram ( by reshaping the coupler plate from to and adding a binary link .
Reshape link to a triangular link such that the triangle is identical to the triangle .
With this embedded pantograph connected to the four-bar linkage at the fictitious coupler point E, the coupler curve is amplified by a factor of and rotated by an angle at point P. Here, and . On a foot path, the distance between the two most extreme positions is referred to as the horizontal stride , as shown in Figure 2.
The dimensional synthesis of a linkage involves determining the appropriate lengths of the links to achieve the desired motions. This process can take the form of quantitative synthesis if an algorithm is specified for the particular problem, or it can be qualitative synthesis if there are more variables than equations [17]. Additionally, dimensional synthesis can be accomplished using trial and error methods to fine-tune the link lengths for optimal performance.
In this study, dimensional synthesis was performed using GIM software [20,21], enabling us to achieve the foot trajectory illustrated in Figure 2. This trajectory is essential for several reasons: it ensures sufficient ground clearance during the swing phase to avoid obstacles, maintains the robot’s stability, and minimizes energy consumption by optimizing the path. Additionally, its smooth curve reduces impact forces during landing, ensuring consistent and controlled foot movements, which are crucial for an efficient and reliable walking robot performance. The obtained foot trajectory is comparable to existing designs like the Klann [9] and Jansen’s mechanisms [22], which are commonly used for such applications. The obtained leg mechanism dimensions are listed in Table 2. More discussions about this comparison and the specifics of our design will be detailed in the upcoming paragraphs of the article.
Table 2.
Parameters of the proposed leg mechanism.
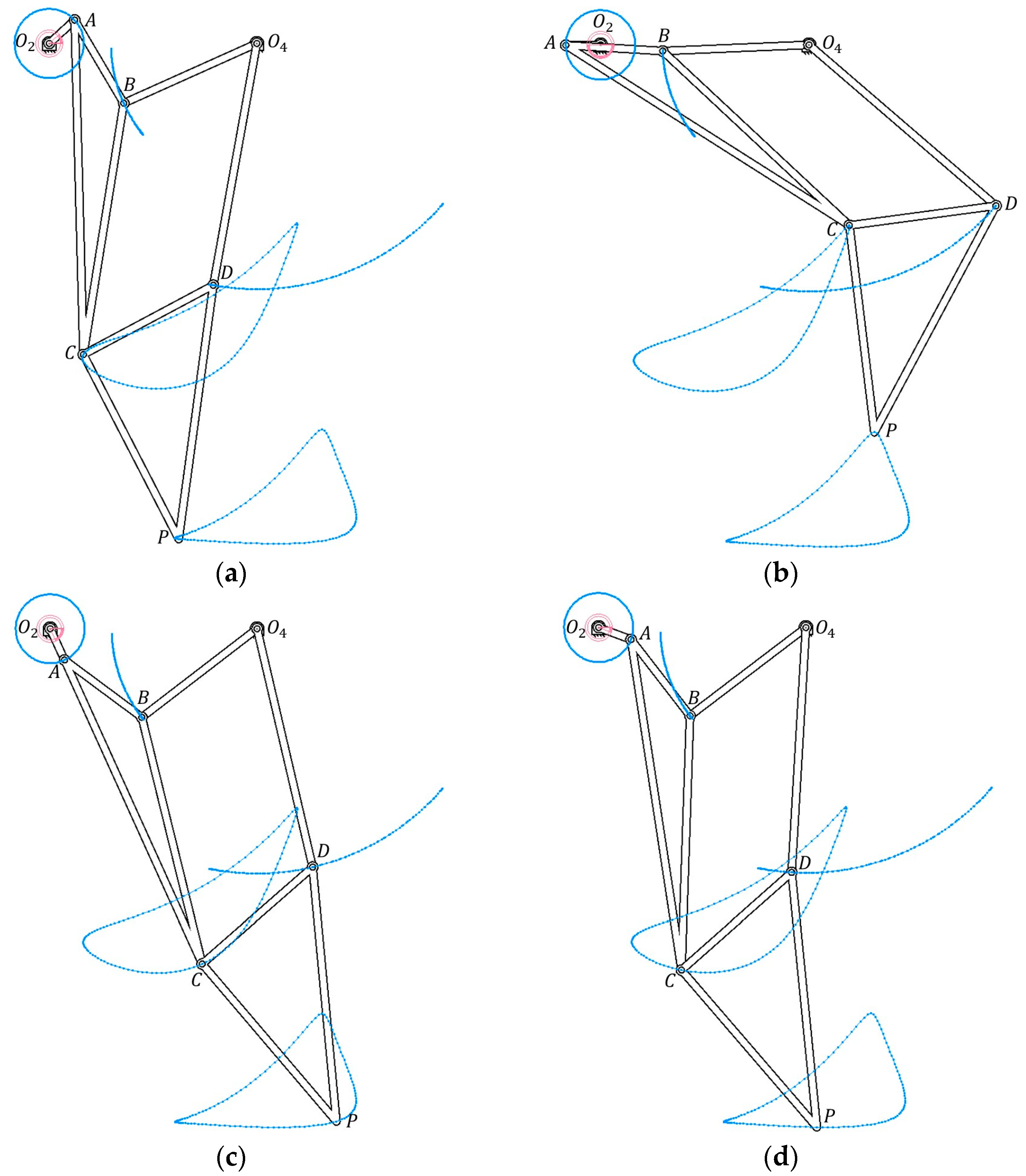
The position of the walking mechanism at different crank angles is shown in Figure 3a–d. The crank is rotated at various intervals, and its initial position is 46° (measured counterclockwise from horizontal reference), as shown in Figure 3a. This is when the leg begins its lift phase. At this position, the linkage is in a specific configuration with the rocker arms aligned accordingly. As the crank rotates counterclockwise (CCW) with constant angular velocity, the connected links will transfer the motion to the foot, causing it to follow a specific path. In Figure 3b, the crank has rotated to 179° from its initial position. The linkage configuration has changed, causing the foot point P to reach its highest position. By Figure 3c, where the crank angle is 290°, point P lands on the ground. Finally, in Figure 3d, the crank has reached 340°, and the foot point is in the middle of its horizontal stride. The transitions at these crank angles depict the mechanical behavior and movement patterns necessary for a walking robot.
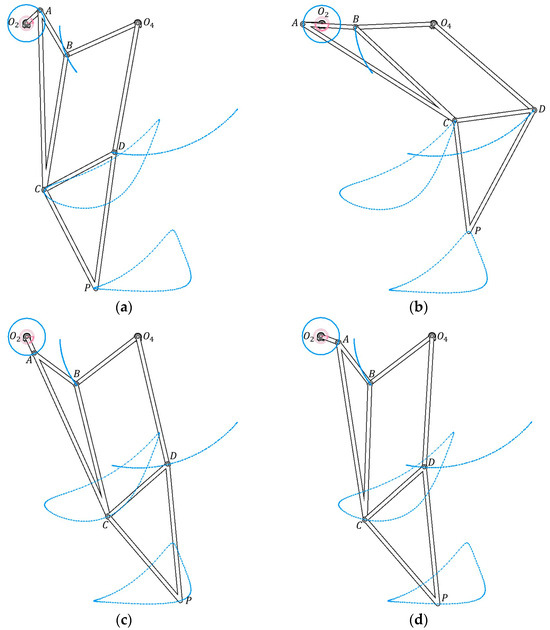
Figure 3.
Leg positions at different crank angles. (a) , (b) , (c) , (d) .
4. Kinematic Analysis
As previously mentioned, our primary objective is to delve into the kinematic capabilities of the mechanism in question. To achieve a comprehensive understanding, we will conduct a thorough analysis encompassing the position, velocity, and acceleration of all the mechanism’s components using algebraic methods. This will include the derivation of equations governing the foot’s position, velocity, and acceleration. Following the analytical phase, we will simulate its motion using GIM software to visualize the dynamics in action. The results of this simulation, alongside a detailed discussion of our findings, will be presented to elucidate the mechanism’s kinematic behavior and its implications for practical applications.
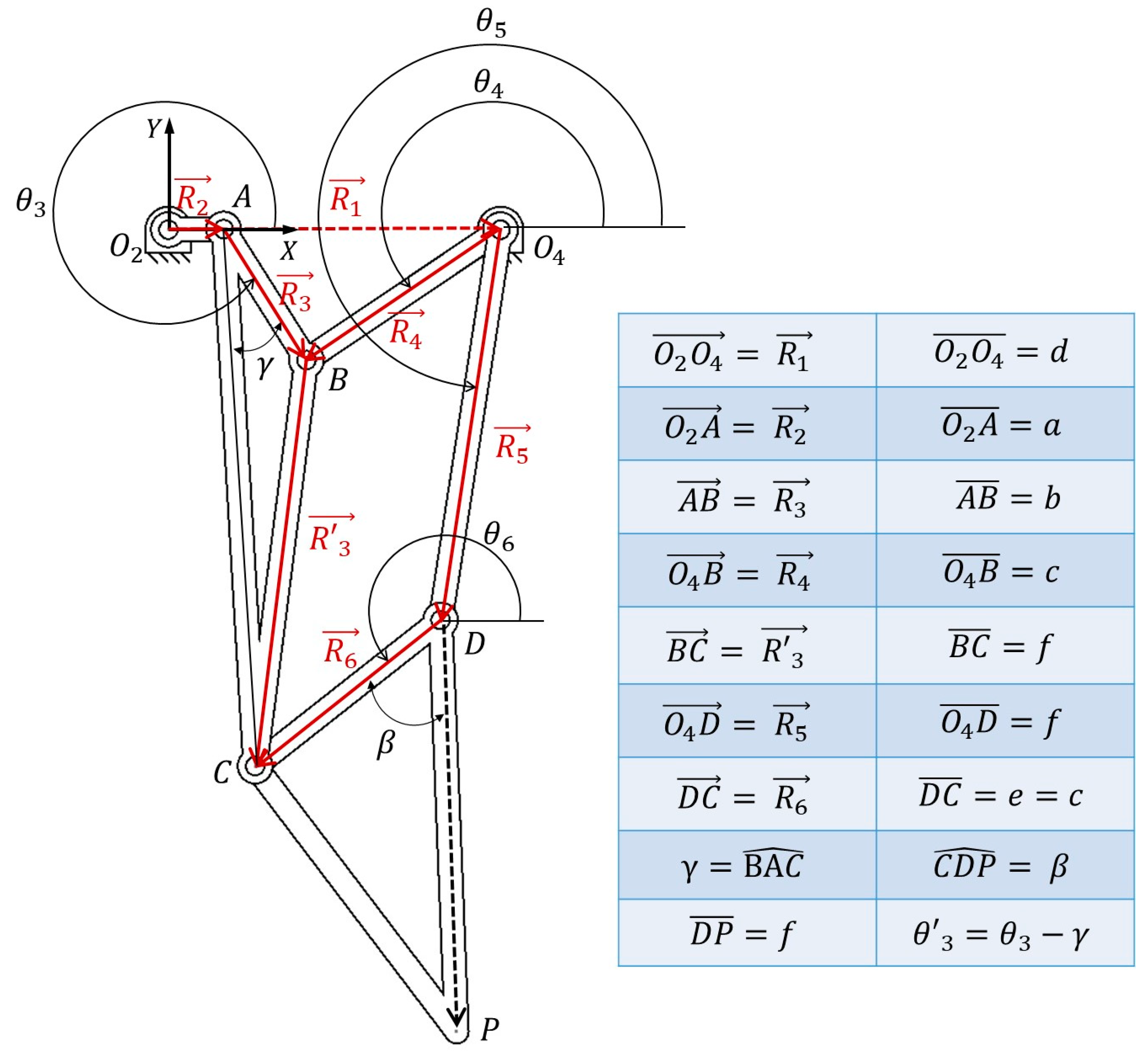
A kinematic analysis was performed for constant crank rotation (, ). For convenience, an X-Y reference coordinate system is defined with its origin at point (Figure 4). The orientation of the links is expressed by an angle, which is measured in the counterclockwise direction from the horizontal reference.
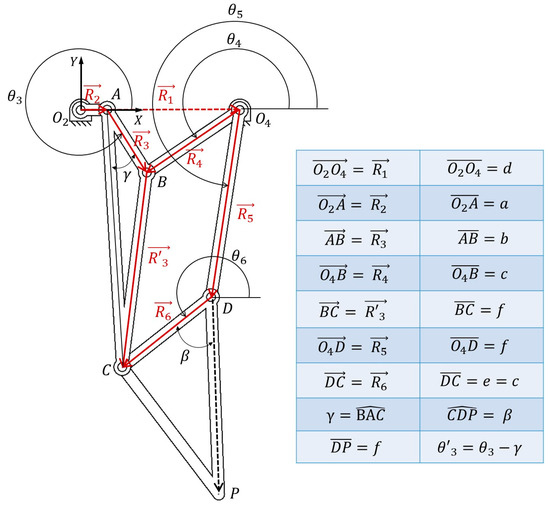
Figure 4.
Vector loops of the mechanism considered for synthesis.
4.1. Position Analysis
The vector loop equation of the four-bar can be written as
Writing each of the above vectors in complex form leads to Equation (2):
The independent variable is and it will be controlled with a motor. To solve Equation (2), we must substitute the Euler equivalents for the terms and then separate the resulting Cartesian-form vector equation into two scalar equations which can be solved simultaneously for and .
where
Due to the geometric properties of the pantograph (), certain relationships between the angles of the links hold true. The angles and are equal because link 6 and link 4 are symmetrical within the pantograph structure. This symmetry ensures that both links maintain the same angle relative to the reference axis. Similarly, the angles and are equal because the pantograph’s geometry enforces mirrored movement, keeping these angles consistent with each other.
The vector position equation of the foot contact point P can be written in the form
By expanding the above expression and separating the real and imaginary parts, we can obtain the coordinates of the foot, and :
4.2. Velocity Analysis
To obtain an expression for the angular velocities of links 3 and 4, we differentiate Equation (2) with respect to time. The equation then becomes
Additionally, this equation leads to two scalar equations which can be solved simultaneously for and .
The pantograph () also affects the angular velocities of the links. The angular velocities and are equal because the rotational speed of these links must be synchronized to maintain the pantograph’s consistent movement. The skew pantograph mechanism ensures that any angular velocity imparted to one link is equally transferred to a corresponding link. Likewise, the angular velocities and are equal due to the pantograph’s design, which translates rotational movement such that these links must have the same angular velocity to preserve its proper movement pattern.
The velocity components of the foot contact point P are calculated by the numerical differentiation of position Equation (14):
4.3. Acceleration Analysis
To obtain an expression for the angular accelerations of links 3 and 4, we differentiate Equation (17) with respect to time. The equation then becomes
This equation leads to two scalar equations which can be solved simultaneously for and .
where
Furthermore, the angular accelerations of the links are influenced by the pantograph’s geometry. The angular accelerations and are equal because the acceleration of one link directly affects the acceleration of the other link within the pantograph. This mechanical linkage ensures that any change in rotational speed is mirrored in the corresponding link. Similarly, the angular accelerations and are equal because the pantograph mechanism distributes the angular acceleration equally among the corresponding links. This ensures that the movement of the leg mechanism remains precise and predictable, which is essential for its proper functioning.
The acceleration components of the foot contact point P are calculated by the numerical differentiation of velocity Equations (22) and (23):
5. Dynamic Analysis
To determine the internal forces and torque in the system, a dynamic force analysis is performed using Newton’s laws, as defined in Equations (37) and (38):
These equations are projected in the rectangular coordinate system, leading to three scalar equations:
where, for each link, m is the mass, and are the linear accelerations of the center of mass, is the mass moment of inertia calculated at the center of mass, and is the angular acceleration.
These three Equations (39) are written for each moving body in the system using the free body diagrams in Figure 5. This results in a set of linear simultaneous equations, which are solved using a matrix method.
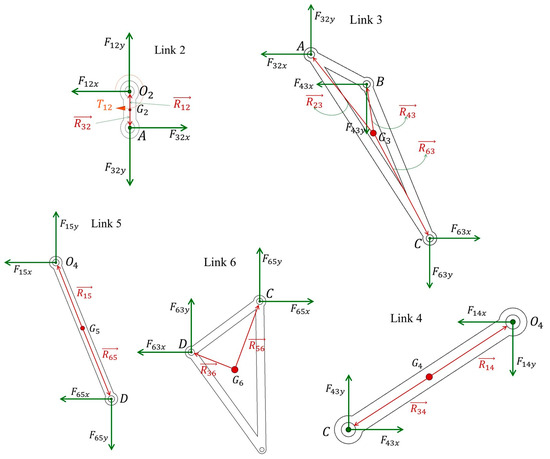
Figure 5.
Free body diagrams of each link at .
Fifteen equations have been developed to determine fifteen unknowns: the forces , , , , , , , , , , , , , , and the input torque . The dimensions of the link lengths and their positions, the locations of the links’ centers of gravity (CGs), the linear accelerations of those CGs, and the angular accelerations and velocities of the links have all been previously determined through kinematic analyses. We can now use these fifteen equations to assemble the matrices and find the solutions.
6. Results and Discussion
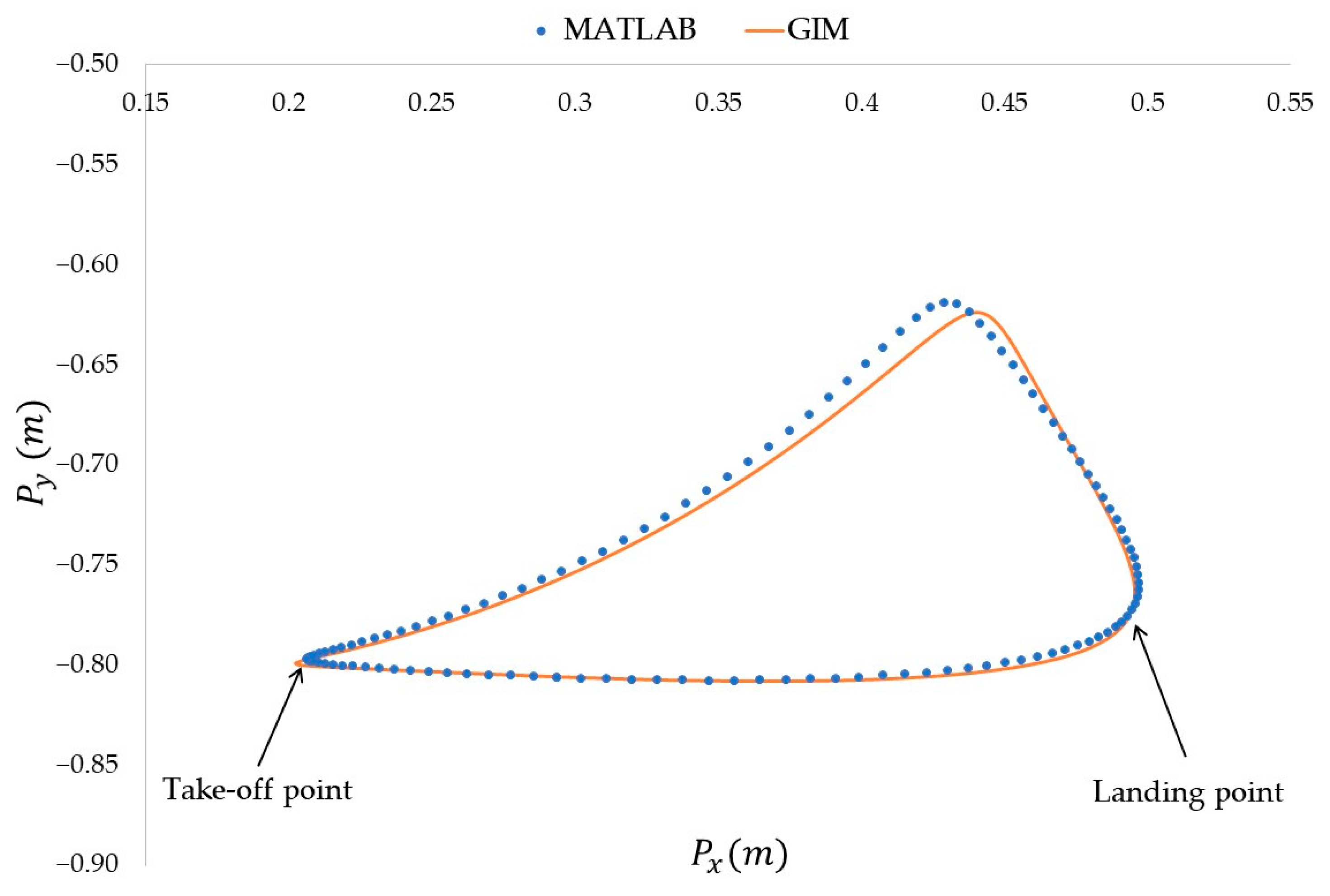
The foot of a walking robot is the component that directly contacts the ground, as shown in Figure 6. With the crank’s rotation, the foot follows a cyclical path relative to the walker’s body, referred to as the locus. This locus is segmented into four phases: support, lift, return, and lower. During the support or stride phase, the foot maintains ground contact. In the lift phase, the foot attains its peak height above the ground while moving in the same direction with the walker’s body. Finally, the foot descends and re-establishes contact with the ground.
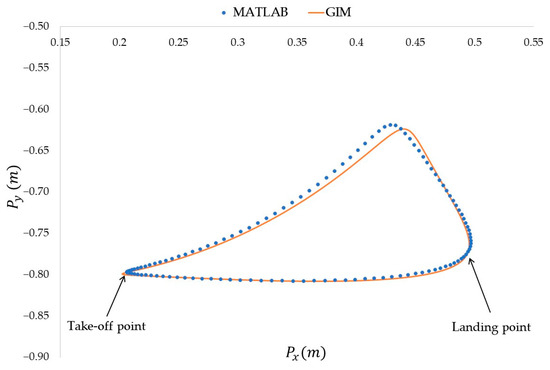
Figure 6.
Foot locus simulated using MATLAB and GIM software.
In Figure 6, the overlapping blue dots (MATLAB) and orange line (GIM) indicate a high level of agreement between the two methods. This trajectory is crucial for ensuring sufficient ground clearance during the swing phase to avoid obstacles, maintaining the robot’s stability, and minimizing energy consumption by optimizing its path. Additionally, the smooth curve reduces impact forces during landing, ensuring consistent and controlled foot movements, which are vital for an efficient and reliable walking robot performance. The start and end of the stride are characterized by more pronounced curves, facilitating a controlled descent of the foot and preventing it from scraping against the ground during elevation. The smooth, continuous curve signifies harmonic motion, further emphasizing the precision required in the foot point’s trajectory for the optimal walking performance of the robot.
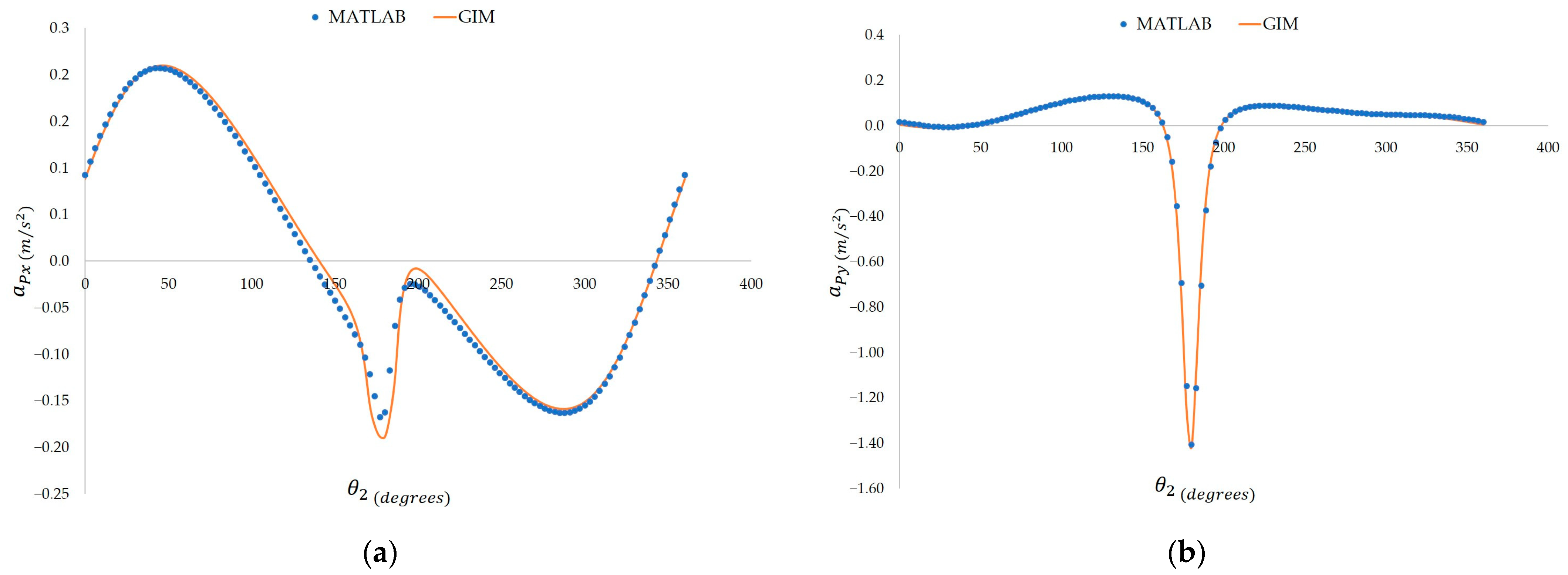
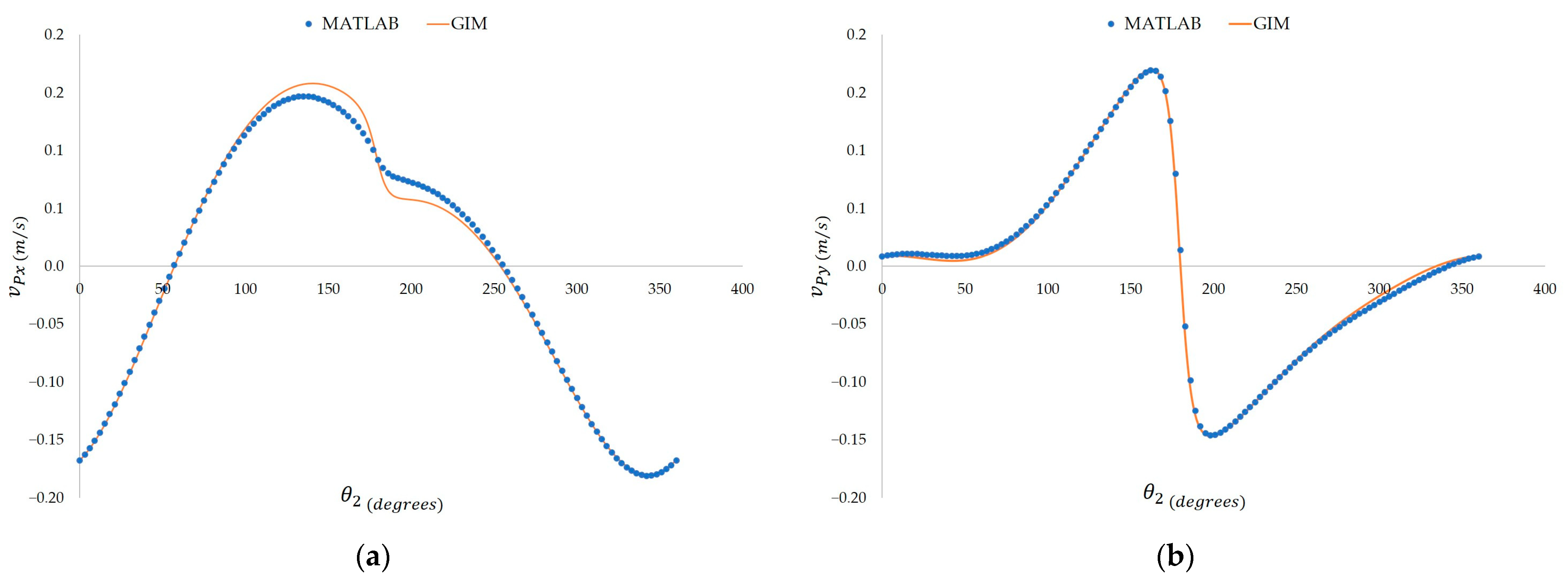
Figure 7 and Figure 8 present the velocity and acceleration results of the foot point P in the and directions through a kinematic analysis of the proposed mechanism.
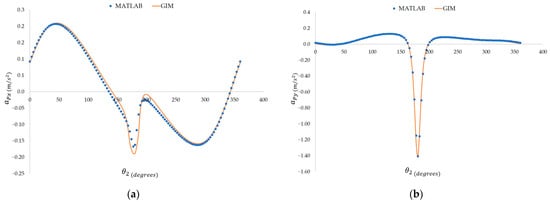
Figure 7.
Velocity of the foot point P in two directions: (a) ‘X’. (b) ‘Y’.
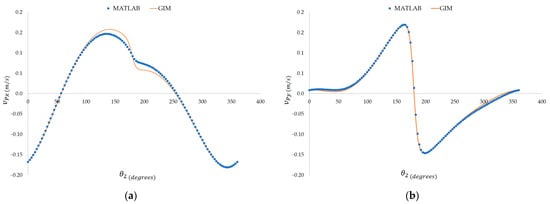
Figure 8.
Acceleration of the foot point P in two directions: (a) ‘X’. (b) ‘Y’.
In Figure 7, the velocity of the foot point P in the direction () and the direction () is shown. The results from the MATLAB and GIM simulations are closely aligned, with both showing similar trends across the range of angles. The velocity in the direction reaches a maximum of approximately 0.2 m/s, while in the direction it peaks slightly above 0.2 m/s. This indicates a balanced motion in both the horizontal and vertical directions.
Figure 8 depicts the acceleration of the foot point P in the direction () and the direction (). The acceleration in the direction reaches up to 0.25 m/s2, while in the direction it shows a significantly larger peak, going up to nearly 0.4 m/s2. The alignment of the MATLAB and GIM results here again confirms the consistency and accuracy of the simulations.
The maximum velocity observed from the simulations is approximately 0.2 m/s, and the acceleration range extends up to 0.4 m/s2. These values suggest that the proposed mechanism can achieve moderate speeds and accelerations, which are beneficial in reducing drag forces when interacting with surfaces like water. For ground surfaces, assuming no slip, the velocity of the feet is effectively the same as the velocity of the robot, ensuring stable and consistent movement.
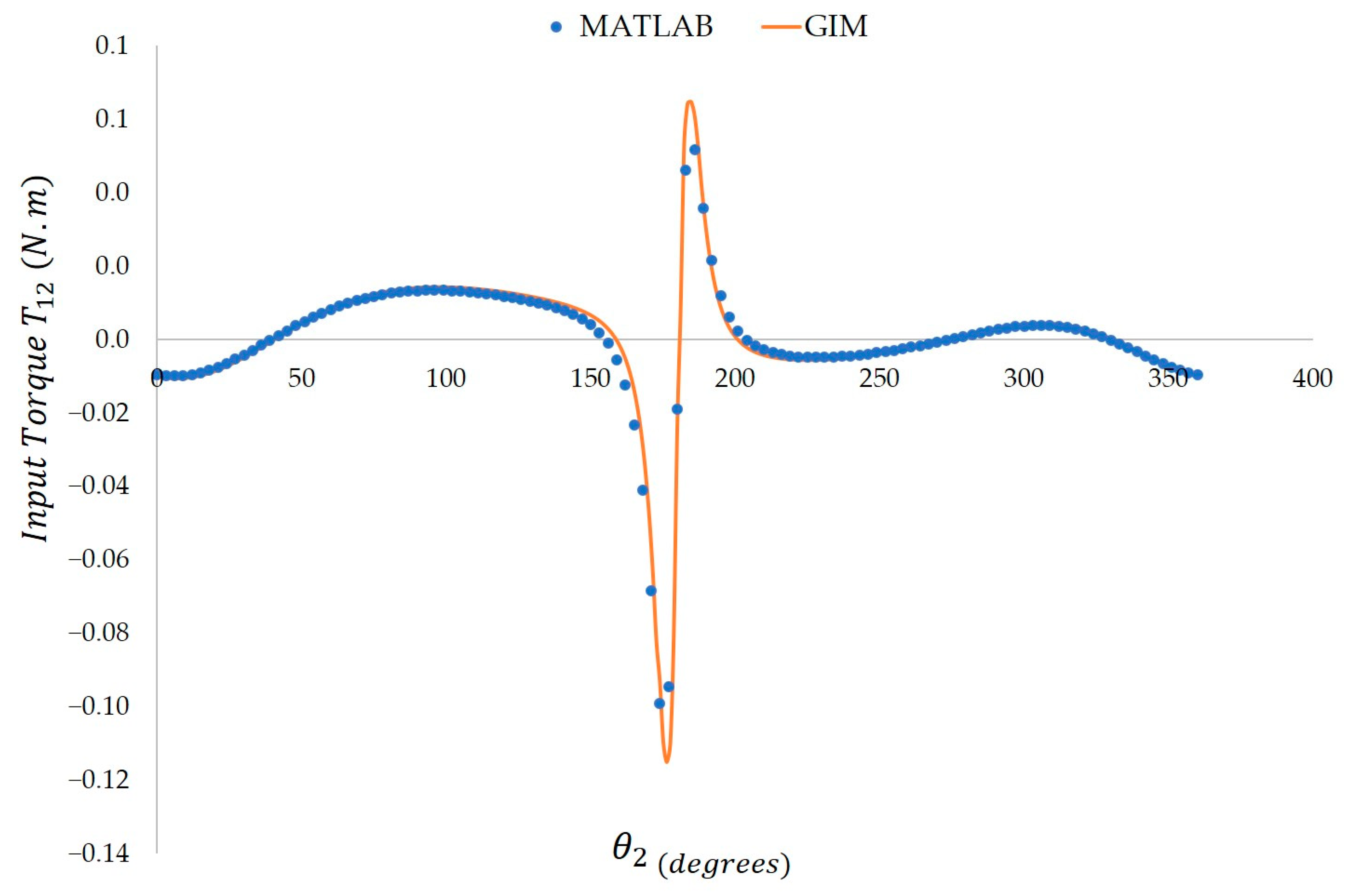
Driving torque is a crucial design parameter that significantly impacts the locomotion performance of leg mechanisms, influencing the frequency of stroke steps and the shape of strides. Analyzing the driving torque helps determine the optimized swing cycle of the leg mechanism, thereby reducing energy consumption.
Figure 9 presents the torque analysis of the proposed mechanism, reflecting the maximum and minimum torque requirements of the drive cycle at the driving node. The torque ranges from approximately −0.12 N·m to 0.07 N·m, indicating its energy consumption and mechanical efficiency during the motion cycle.
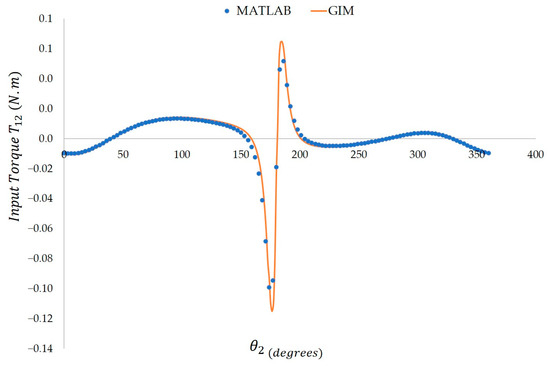
Figure 9.
Input torque obtained using MATLAB and GIM software.
The waveform shows that the peak torque is generated during the swing phase, particularly around the interval of 150 to 200 degrees. This peak torque is associated with the high lift forces required to move the leg, which increases energy consumption during this phase. Conversely, the torque is negative during the lowering phase, which occurs in the intervals separating the stance and swing phases.
The results from both the MATLAB and GIM simulations align closely, confirming the consistency and reliability of the analysis. The observed torque pattern highlights the characteristic behavior of closed-loop linkages, where significant torque variations occur during different phases of the leg’s motion cycle. By understanding these torque requirements, designers can optimize the mechanism to improve its overall performance and reduce unnecessary energy expenditure.
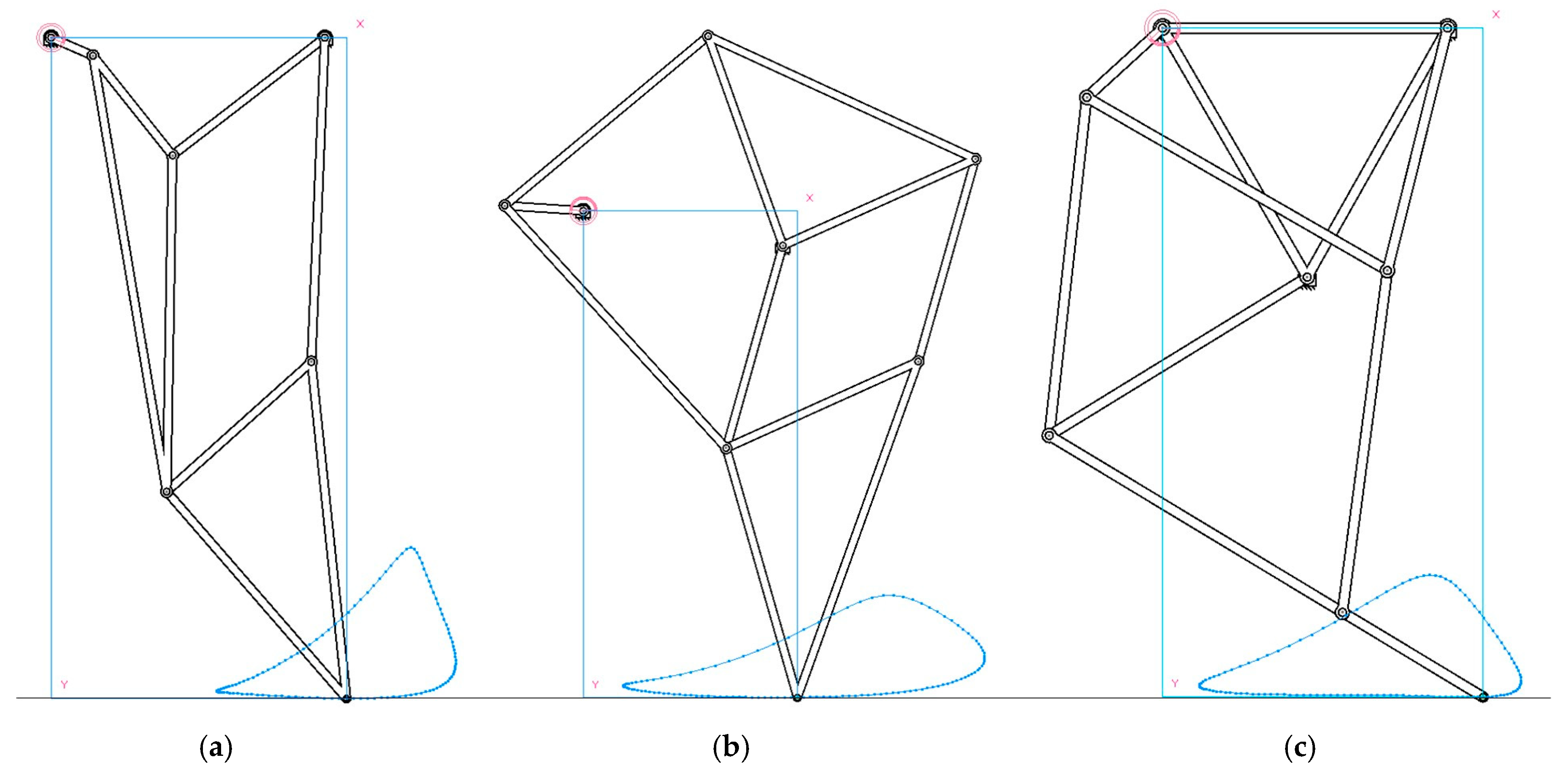
7. Comparison of the New Leg Mechanism with Existing Designs
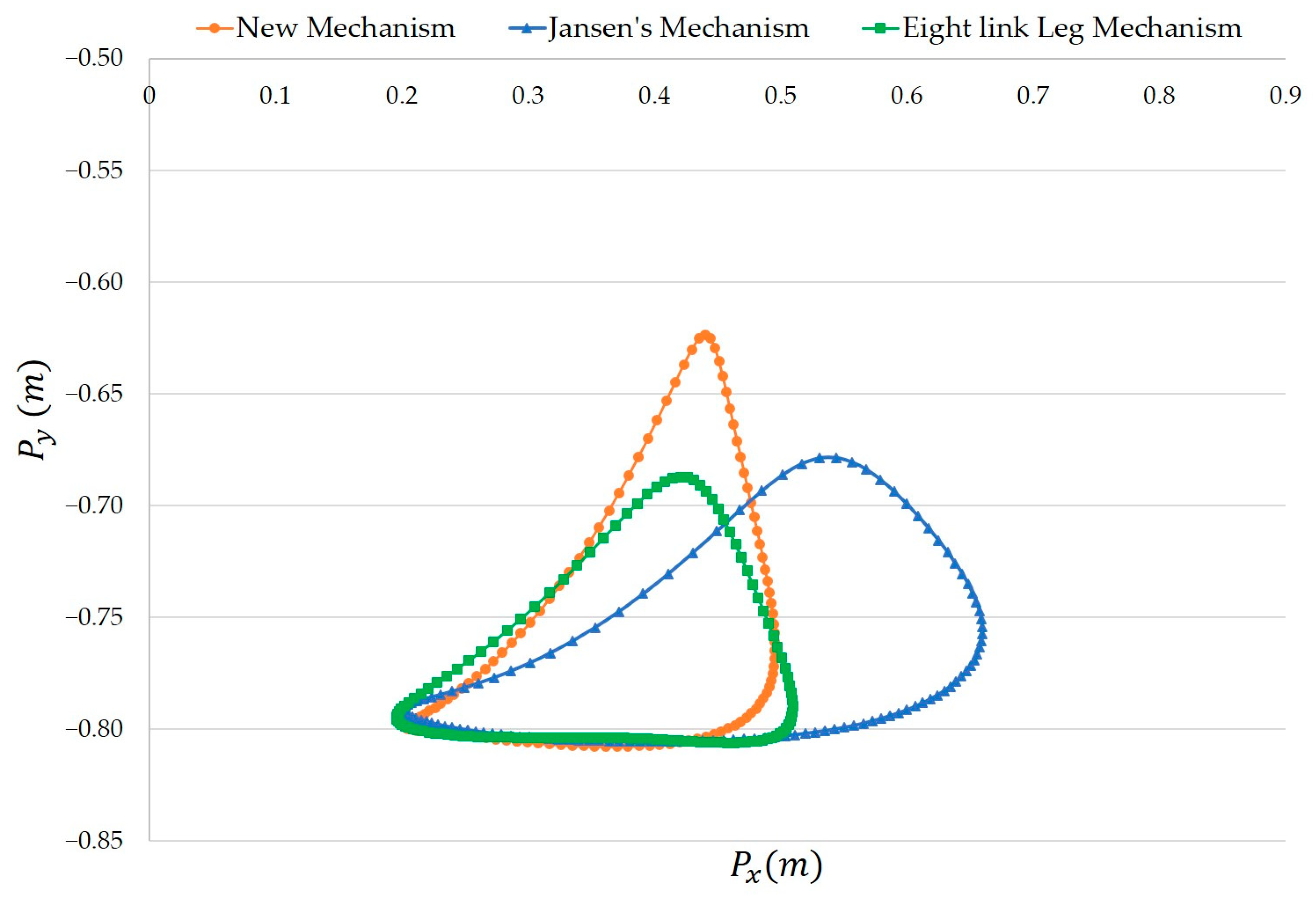
Walking leg mechanisms, such as the Klann, Jansen’s, and others, have been practically adopted in walking machines, each showcasing distinct geometry and behavior. Figure 10 and Figure 11 illustrate the foot trajectories, for one complete crank rotation, of the proposed walking leg mechanism, Jansen’s mechanism, and the eight-link leg mechanism proposed by Desai et al. [7]. The data on Jansen’s mechanism have been sourced from Patnaik et al. [22], and the data on the eight-link mechanism have been sourced from Desai et al. [7]. Compared to the new design, Jansen’s linkage foot trajectory features a smaller lift but a larger stride. In comparison with the eight-link linkage, the new mechanism has a very similar stride length but a higher lift. Another notable difference with Jansen’s linkage is the position of the crank, which is nearly in the mid-portion of the mechanism when measured vertically, whereas in the proposed mechanism the crankshaft is positioned at the top. The proposed mechanism can be designed solely with binary links; however, it is also possible to construct it using ternary links. Its major differences compared to Jansen’s mechanism and the eight-link leg are summarized in Table 3.
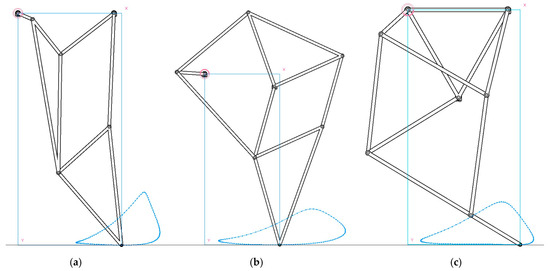
Figure 10.
Comparison of the foot profiles of the (a) new, (b) Jansen’s [22], and (c) Eight-Link Leg Mechanisms [7].
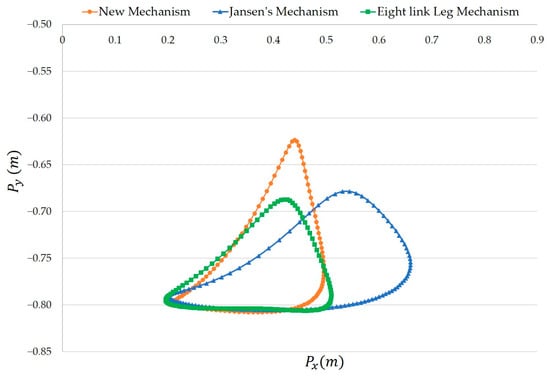
Figure 11.
Foot trajectories of the newly proposed, Jansen’s, and Eight-Link Leg Mechanisms.
Table 3.
Comparison of the new leg mechanism with existing designs.
8. Robot Architecture
8.1. Topology Optimization
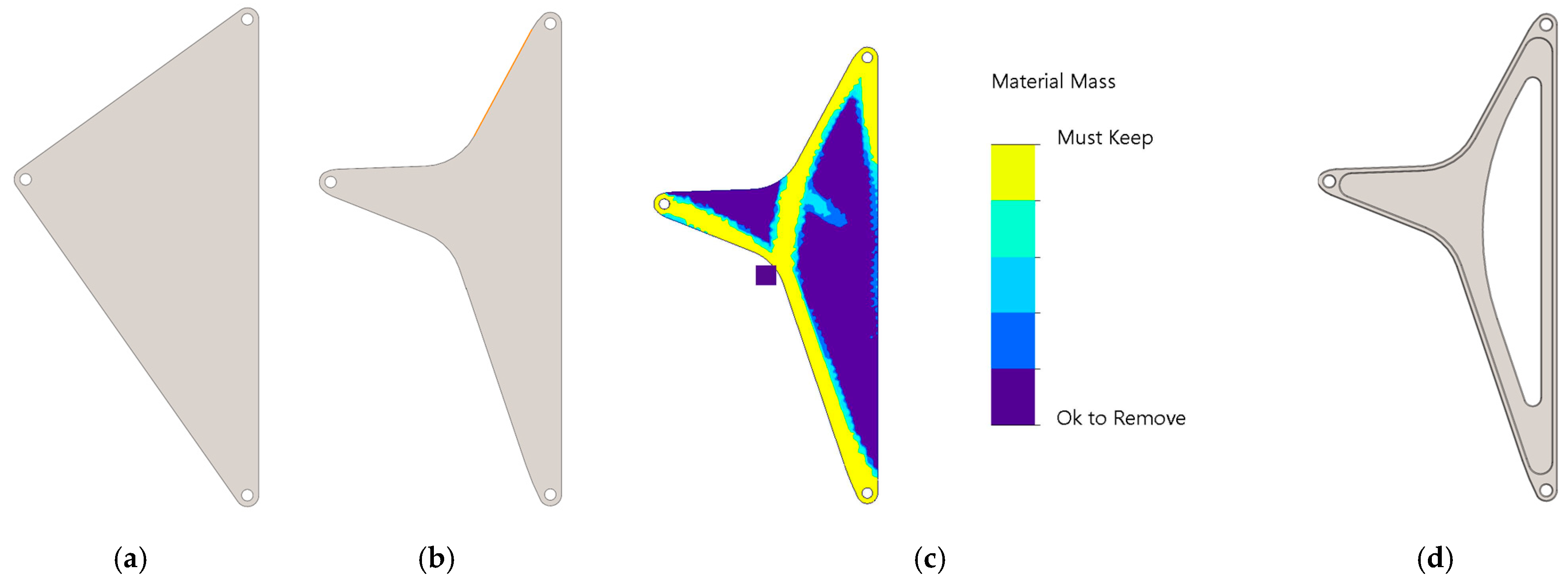
Topology optimization is performed on link 6 to reduce the weight of the leg. Figure 12 shows the different steps to this approach. The original dimensions of the part are obtained from the kinematic study shown in Figure 12a. This design is then modified to suit the esthetics of the robot leg and achieve weight reduction. A topology optimization study is then performed in SolidWorks to optimize the strength-to-weight ratio. The result of the topology optimization serves as a guide for further removing sections from the part to arrive at the final design (Figure 12d).
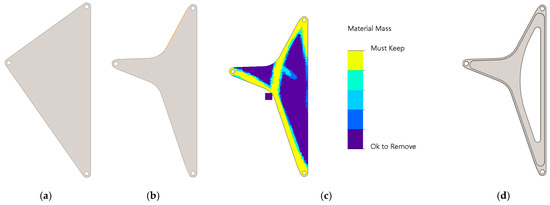
Figure 12.
Topology optimization steps: (a) initial kinematic design, (b) first modification, (c) topology optimization results from SolidWorks, and (d) final optimized design.
8.2. Leg Static Analysis
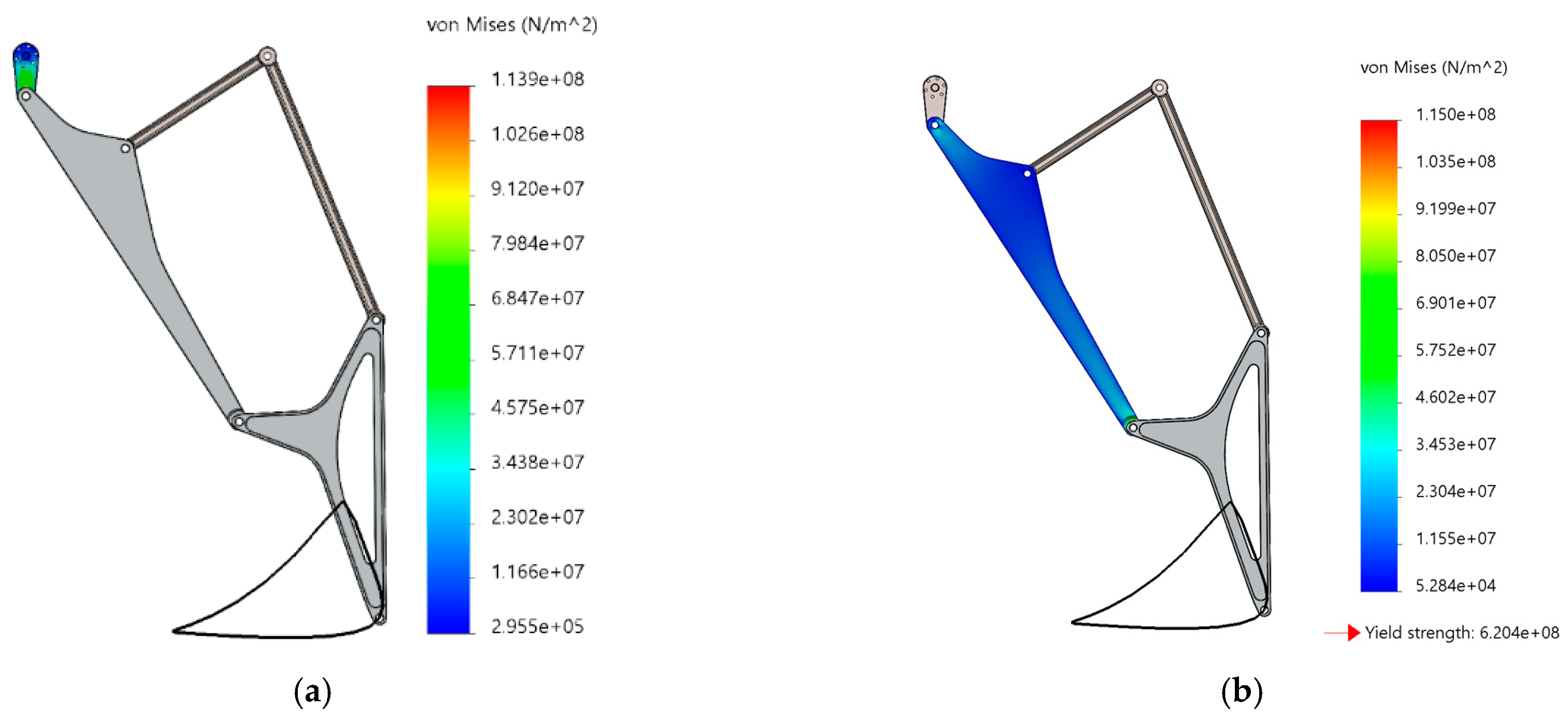
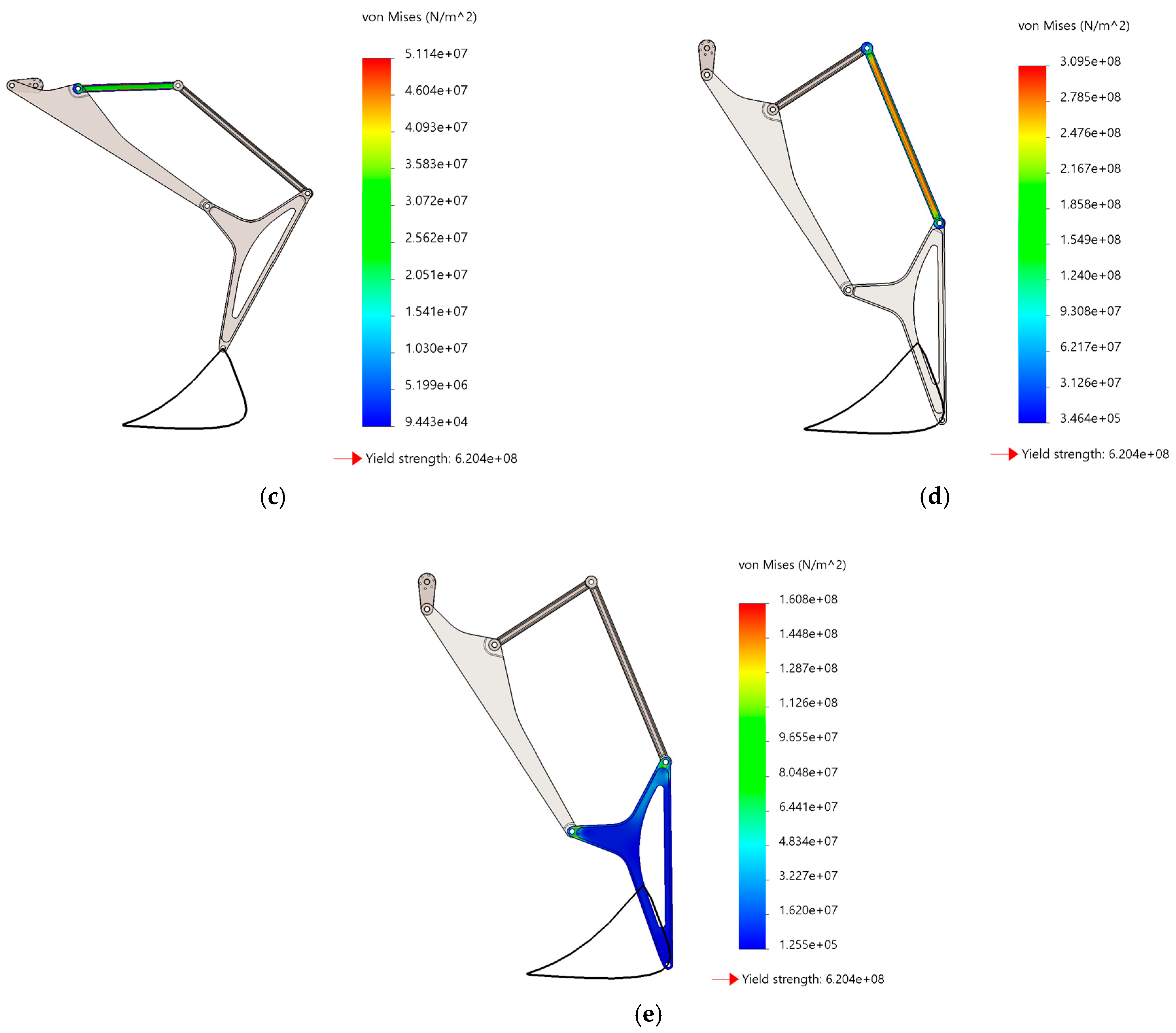
The robot is designed to have a total weight of 200 N, including its payload. For simulation purposes, it is assumed that the load is equally distributed across the four legs, resulting in a 50 N load applied to each foot in the downward direction. The input link is driven at a speed of 10 rpm (, and a motion study is conducted using SolidWorks to determine the internal forces within the system. Subsequently, a stress simulation is performed on each link throughout one complete cycle of operation, utilizing the motion loads derived from the previous step. The cycle is divided into 25 evenly spaced sampling points at which SolidWorks calculates the stresses generated within the model. These data are used to identify the critical position in each link where the maximum von Mises stress occurs. The link design is then modified at this critical position while maintaining a constant length to the link, until the minimum factor of the safety requirement is satisfied. These steps are repeated for each link to achieve the final design. Figure 13 shows the critical positions where the stresses were found to be at their maximum for each link, and Table 4 shows the corresponding von Mises stress values and the minimum factor of safety (FOS).
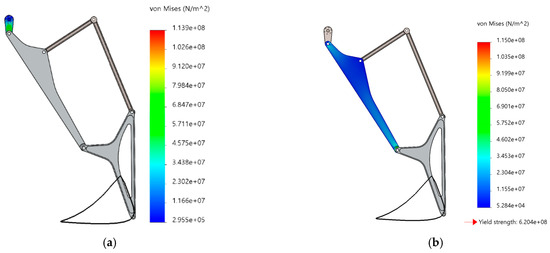
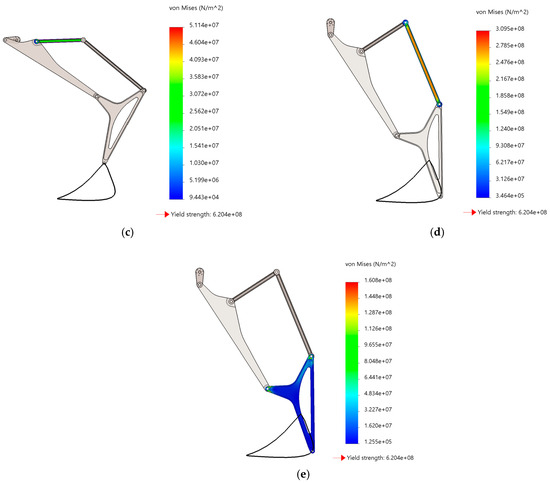
Figure 13.
Stress analysis of (a) link 2, (b) link 3, (c) link 4, (d) link 5, and (e) link 6.
Table 4.
Maximum von Mises stresses and factors of safety on each link.
8.3. Robot System Structure
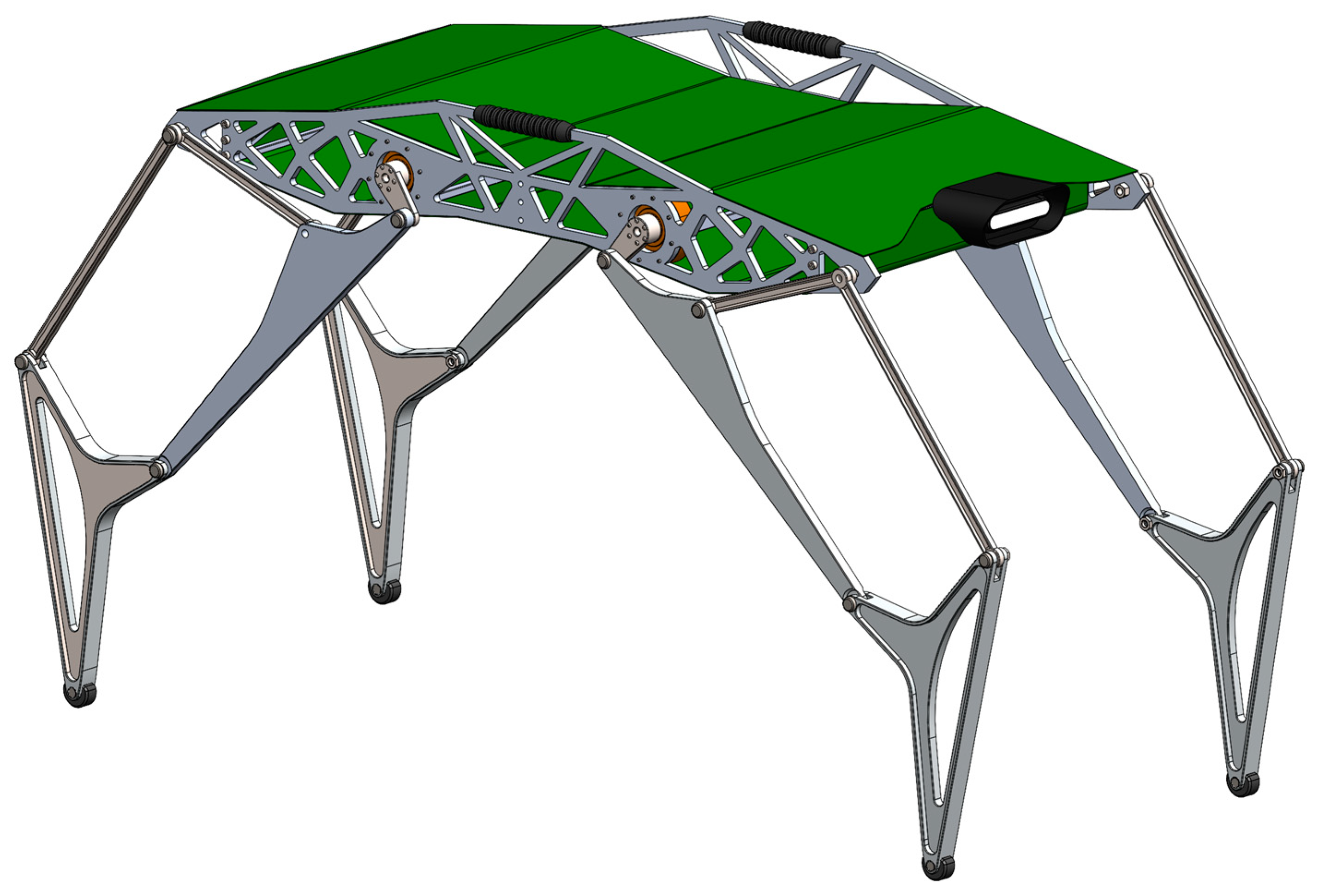
Legged robots exhibit a remarkable adaptability to uneven surfaces, overcoming obstacles that traditional wheeled robots struggle with. Our research aims to create an efficient four-legged robot capable of locomotion across diverse environments. We focus on stability, energy efficiency, and mechanical simplicity by optimizing its leg structure. SolidWorks is employed for designing the robot. The robot achieves locomotion using four legs attached to its base. We recommend using two motors, one on each side, with a gear system to power the robot. A 3D model of the robot is presented in Figure 14.
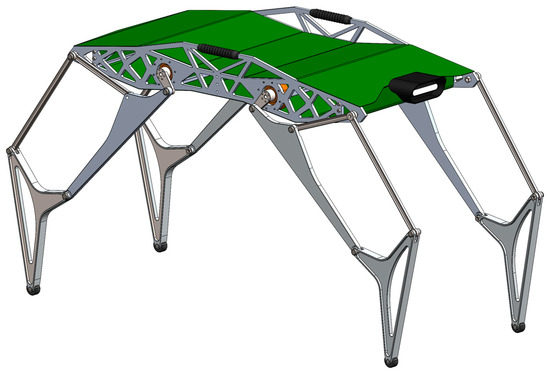
Figure 14.
CAD design of the proposed walking robot.
9. Conclusions
This paper presents the design, kinematic analysis, and optimization of a six-bar crank-driven leg mechanism integrated with an embedded skew pantograph for walking robots. The kinematic analysis using GIM software and MATLAB validated the mechanism’s ability to generate a high-lift foot trajectory with sufficient ground clearance, ensuring stable and efficient walking across uneven terrains. The mechanism’s compact design provides an optimal balance between simplicity, performance, and cost-effectiveness, making it suitable for practical applications where mobility over rough or obstructed surfaces is essential, such as in agriculture, search and rescue, and planetary exploration.
The use of topology optimization significantly reduces the weight of the ground-contacting link without compromising its structural integrity. Additionally, the stress analysis confirms that the design can withstand expected operational loads, demonstrating its readiness for real-world implementation.
The mechanism is compared with Jansen’s and eight-link mechanisms, with differences noted. Advantages of the proposed leg mechanism include the following:
- The mechanism is mounted on a frame with only two fixed pivots while preserving its structural stability.
- The proposed mechanism can be constructed using binary links, although ternary links can also be used.
- The walking mechanism can be built compactly, resulting in less weight and inertia, making it suitable for speed walking.
- The mechanism performs well during both clockwise and counterclockwise rotation of the crank.
- This mechanism has a compact stride-to-size ratio and high lift.
The practical applications of this mechanism could include autonomous agricultural robots capable of navigating through complex and uneven farming environments, robots used for planetary exploration where the terrain is unpredictable, or robots designed for urban search and rescue missions that require adaptability to various surfaces.
Future research could focus on improving the energy efficiency of the mechanism by exploring alternative materials or lightweight composites that maintain their structural integrity while reducing their mass further. Additionally, exploring control systems that can adapt the walking gait based on sensor feedback from the environment would enhance a robot’s ability to operate autonomously in more dynamic conditions. Prototype development and real-world testing would be the next step in validating this design in various environmental scenarios.
Author Contributions
Conceptualization, E.G.-H., S.A. and A.S.; software, E.G.-H., S.A. and B.P.; validation, O.M. and S.A.; formal analysis, E.G.-H.; writing—original draft preparation, E.G.-H., A.S., B.P., O.M. and S.A.; writing—review and editing, E.G.-H., S.A. and O.M.; visualization, S.A., B.P. and E.G.-H.; supervision, E.G.-H.; project administration, E.G.-H., O.M. and S.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data is contained within the article.
Acknowledgments
The authors wish to acknowledge Alfonso Hernández, CompMech, Department of Mechanical Engineering, UPVEHU, for granting them permission to use GIM® software. (www.ehu.es/compmech) (accessed on 21 January 2024).
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Gutierrez, A.; Barber, R. Mobile Robots History. In Proceedings of the 8TH International Conference on Climbing and Walking Robots, London, UK, 13–15 September 2005. [Google Scholar]
- Zamalloa, I.; Kojcev, R.; Hernández, A.; Muguruza, I.; Usategui, L.; Bilbao, A.; Mayoral, V. Dissecting Robotics—Historical overview and future perspectives. arXiv 2017. [Google Scholar] [CrossRef]
- Amine, S.; Hanna, E.G. Kinematics of a Family of 3t1r Parallel Manipulators with Simplified Structures. J. Eng. Sci. Technol. 2024, 19, 1105–1121. [Google Scholar]
- Choudhari, A.; Deshpande, A.; Tirgure, M.; Parihar, C.; Jibhakate, M. Rocker-Bogie Stair Climbing Robot. J. Phys. Conf. Ser. 2022, 2251, 012004. [Google Scholar] [CrossRef]
- Hodoshima, R.; Fukumura, Y.; Amano, H.; Hirose, S. Development of track-changeable quadruped walking robot TITAN X-design of leg driving mechanism and basic experiment. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 3340–3345. [Google Scholar]
- Radford, N.A.; Strawser, P.; Hambuchen, K.; Mehling, J.S.; Verdeyen, W.K.; Donnan, A.S.; Holley, J.; Sanchez, J.; Nguyen, V.; Bridgwater, L.; et al. Valkyrie: NASA’s First Bipedal Humanoid Robot. J. Field Robot. 2015, 32, 397–419. [Google Scholar] [CrossRef]
- Desai, S.G.; Annigeri, A.R.; TimmanaGouda, A. Analysis of a new single degree-of-freedom eight link leg mechanism for walking machine. Mech. Mach. Theory 2019, 140, 747–764. [Google Scholar] [CrossRef]
- Vanitha, U.; Premalatha, V.; Nithinkumar, M.; Vijayaganapathy, S. Mechanical Spider Using Klann Mechanism; SAS: Cary, NC, USA, 2016. [Google Scholar]
- Rafeeq, M.; Toha, S.; Ahmad, S.; Yousuf, M.; Mohd Razib, M.A.; Hakim, M. Design and Modeling of Klann Mechanism-Based Paired Four Legged Amphibious Robot. IEEE Access 2021, 9, 166436–166445. [Google Scholar] [CrossRef]
- Nansai, S.; Mohan, R.E.; Iwase, M. Speed Control of Jansen Linkage Mechanism for Exquisite Tasks. J. Adv. Simul. Sci. Eng. 2016, 3, 47–57. [Google Scholar] [CrossRef]
- Wu, G. Kinematic Analysis and Optimal Design of a Wall-mounted Four-limb Parallel Schönflies-motion Robot for Pick-and-place Operations. J. Intell. Robot Syst. 2017, 85, 663–677. [Google Scholar] [CrossRef]
- Hao, R.; Guo, C.; Han, Z.; Han, Y. Design and research of single leg walking mechanism of quadruped robot. Vibroengineering Procedia 2023, 49, 130–135. [Google Scholar] [CrossRef]
- Shieh, W.-B.; Tsai, L.-W.; Azarm, S.; Tits, A.L. A New Class of Six-Bar Mechanisms with Symmetrical Coupler Curves. J. Mech. Des. 1998, 120, 150–153. [Google Scholar] [CrossRef]
- Lenarčič, J.; Stanišić, M.M. (Eds.) Advances in Robot Kinematics: Motion in Man and Machine, 2010th ed.; Springer: Dordrecht, The Netherlands; Heidelberg, Germany, 2010; ISBN 978-90-481-9261-8. [Google Scholar]
- Amine, S.; Hanna, E.G. Kinematic Analysis of HALF Parallel Robot. J. Eng. Sci. Technol. Rev. 2019, 12, 207–213. [Google Scholar] [CrossRef]
- Chamas, M.H.; Amine, S.; Gazo Hanna, E.; Mokhiamar, O. Control of a novel parallel mechanism for the stabilization of unmanned aerial vehicles. Appl. Sci. 2023, 13, 8740. [Google Scholar] [CrossRef]
- Norton, R. Design of Machinery, 6th ed.; McGraw Hill: New York, NY, USA, 2019; ISBN 978-1-260-11331-0. [Google Scholar]
- John, J.; Uicker, J.; Pennock, G.R.; Shigley, J.E. Theory of Machines and Mechanisms. Available online: https://www.cambridge.org/highereducation/books/theory-of-machines-and-mechanisms/0B92D8B2CCAC661E49497E959A026A6E (accessed on 12 February 2024).
- Pennock, G.R.; Israr, A. Kinematic analysis and synthesis of an adjustable six-bar linkage. Mech. Mach. Theory 2009, 44, 306–323. [Google Scholar] [CrossRef]
- Petuya, V.; Macho, E.; Altuzarra, O.; Pinto, C.; Hernandez, A. Educational software tools for the kinematic analysis of mechanisms. Comput. Appl. Eng. Educ. 2014, 22, 72–86. [Google Scholar] [CrossRef]
- AlJaimaz, M.; AlMazidi, Z.; AlDousari, H.; Ebrahem, F.; AlZayyan, D.; Gazo Hanna, E. Kinematic Analysis of a Variable Speed Deep Drawing Press Using GIM Software. In Proceedings of the 9th World Congress on Mechanical, Chemical, and Material Engineering, London, UK, 6–8 August 2023. [Google Scholar]
- Patnaik, L.; Umanand, L. Kinematics and dynamics of Jansen leg mechanism: A bond graph approach. Simul. Model. Pract. Theory 2016, 60, 160–169. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).