
Stability Comparison of Grid-Connected Inverters Considering Voltage Feedforward Control in Different Domains


Abstract
:1. Introduction
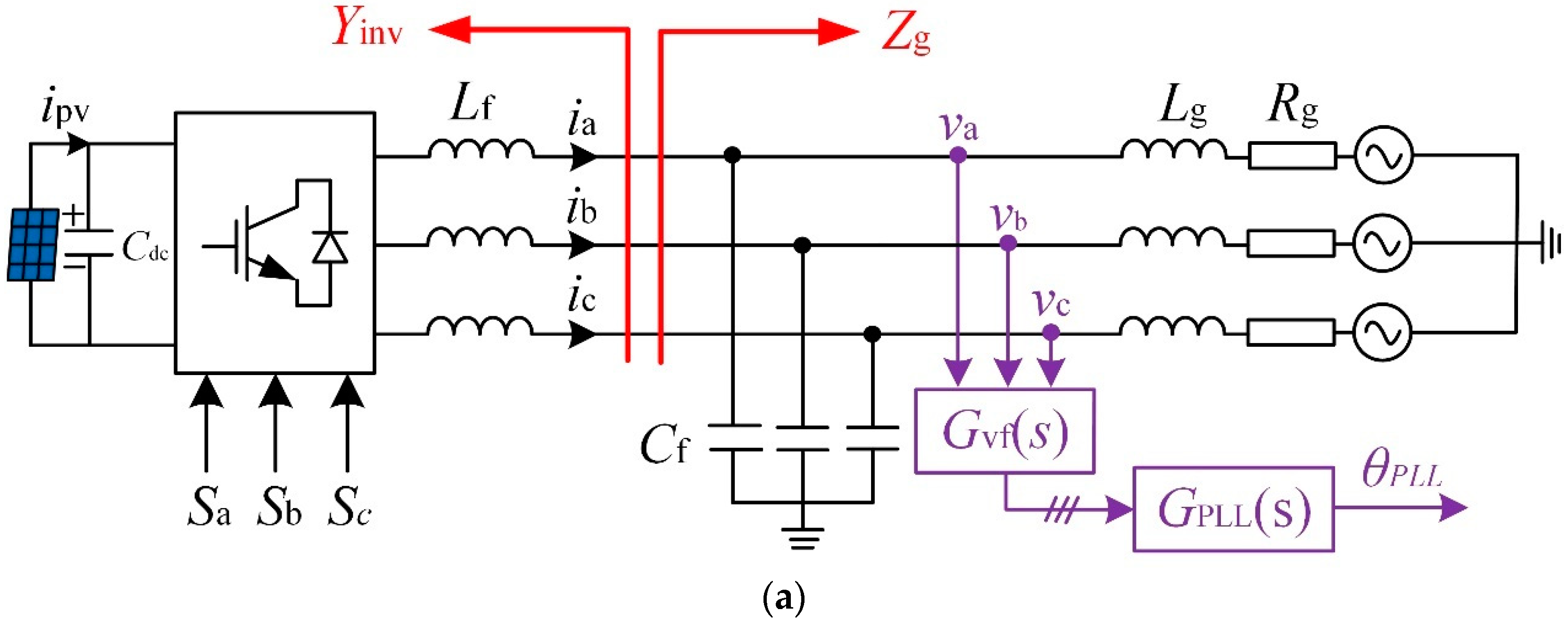
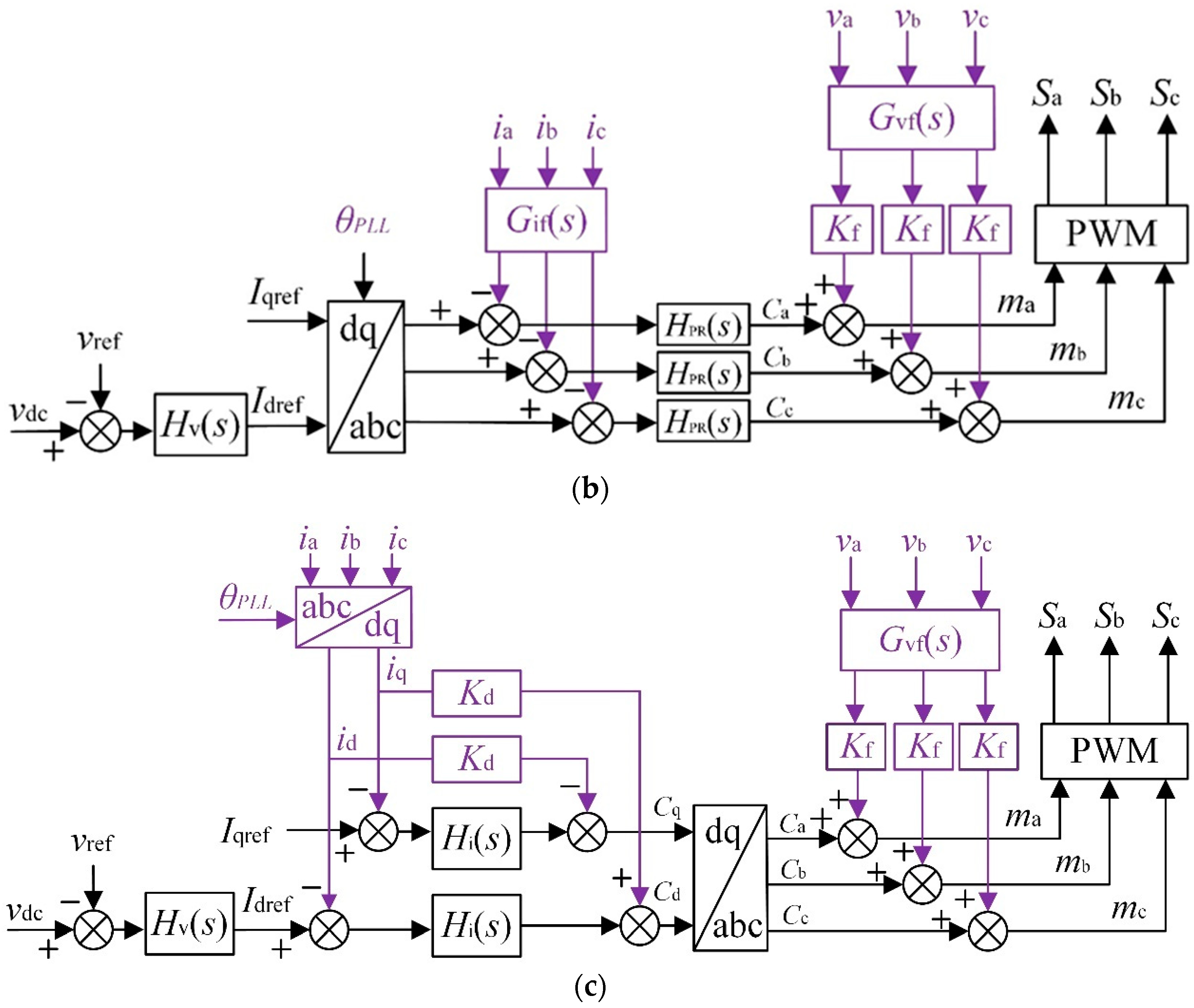
2. GCI System Structure with Different Domain Controls
3. Sequence Admittance Modeling of Grid-Connected Inverter
3.1. Phase-Locked Loop Modeling
3.2. Voltage Outer Loop Modeling
3.3. Sequential Admittance Modeling of GCI by PR
3.4. Sequence Admittance Modeling of Grid-Connected Inverter Controlled by PI
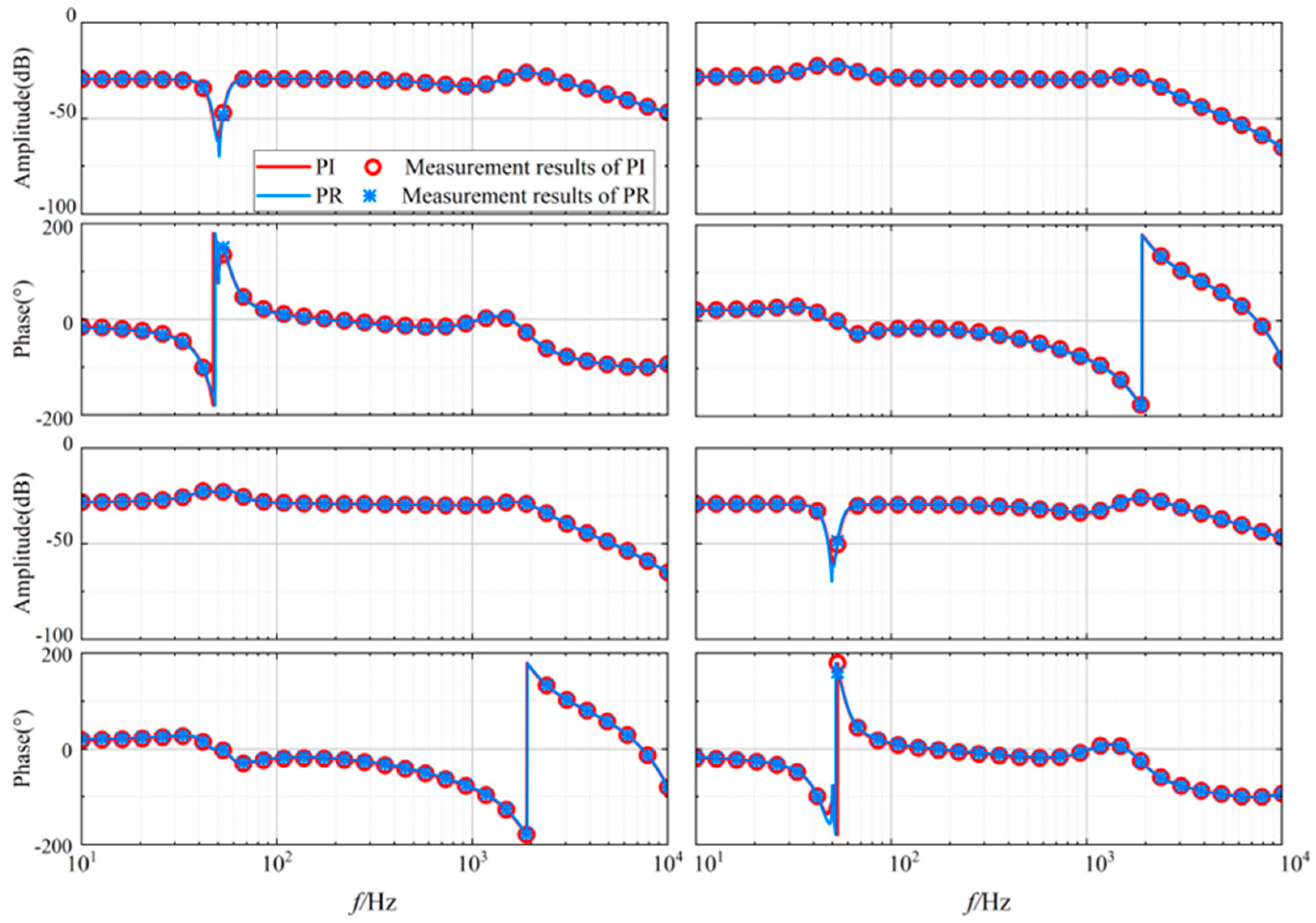
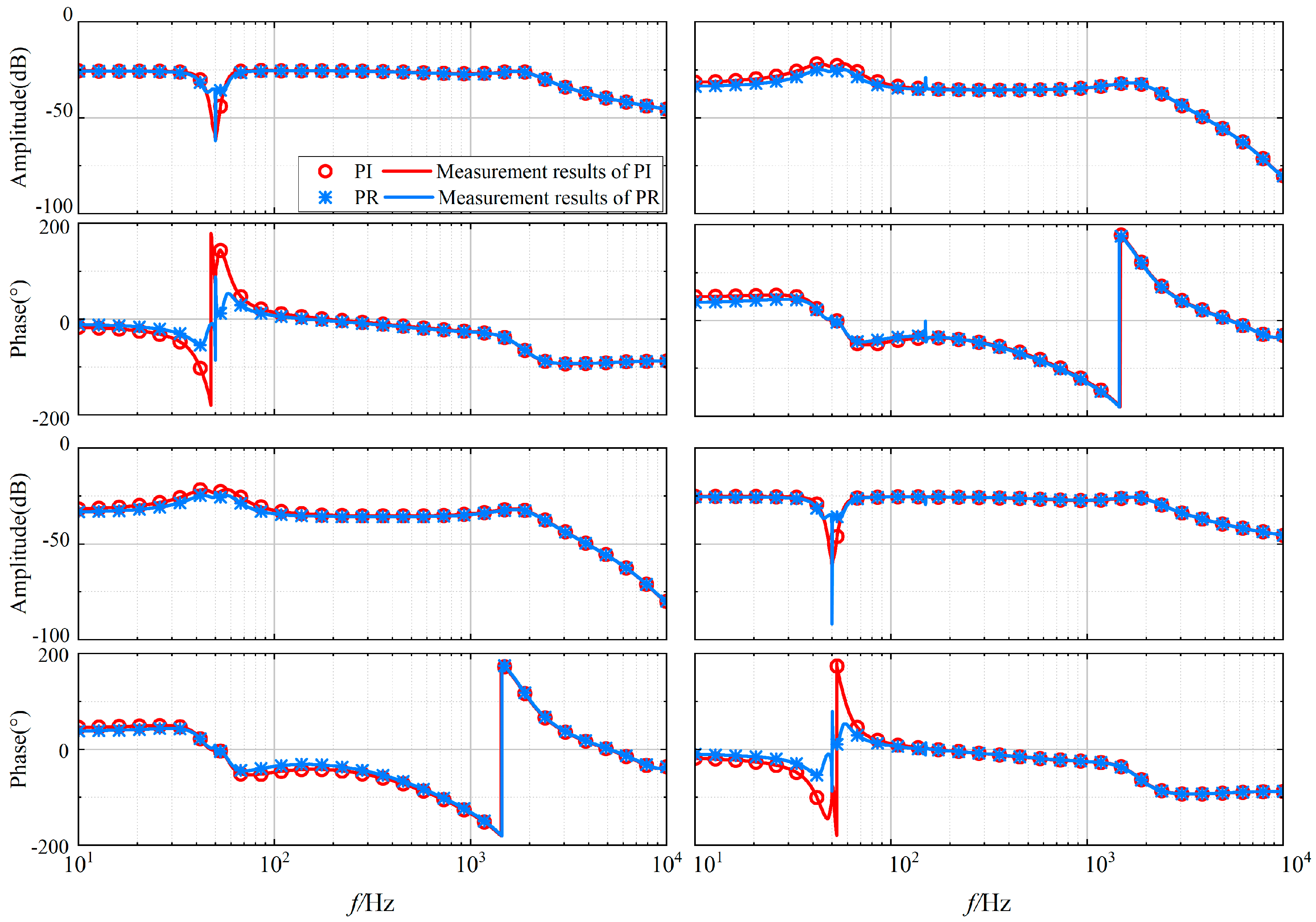
- (1)
- Whether or not the VFL (voltage feedforward link) is considered, the frequency-coupled admittance matrix in different domains aligns with the measured values, confirming the theoretical model’s accuracy.
- (2)
- Under two different domain current controls, irrespective of VFL, the amplitude values of the diagonal elements Y11 and Y22 are similar to those of the non-diagonal elements Y12 and Y21, highlighting the significance of the frequency coupling effect.
- (3)
4. Stability Analysis of GCI Controlled by Different Domains
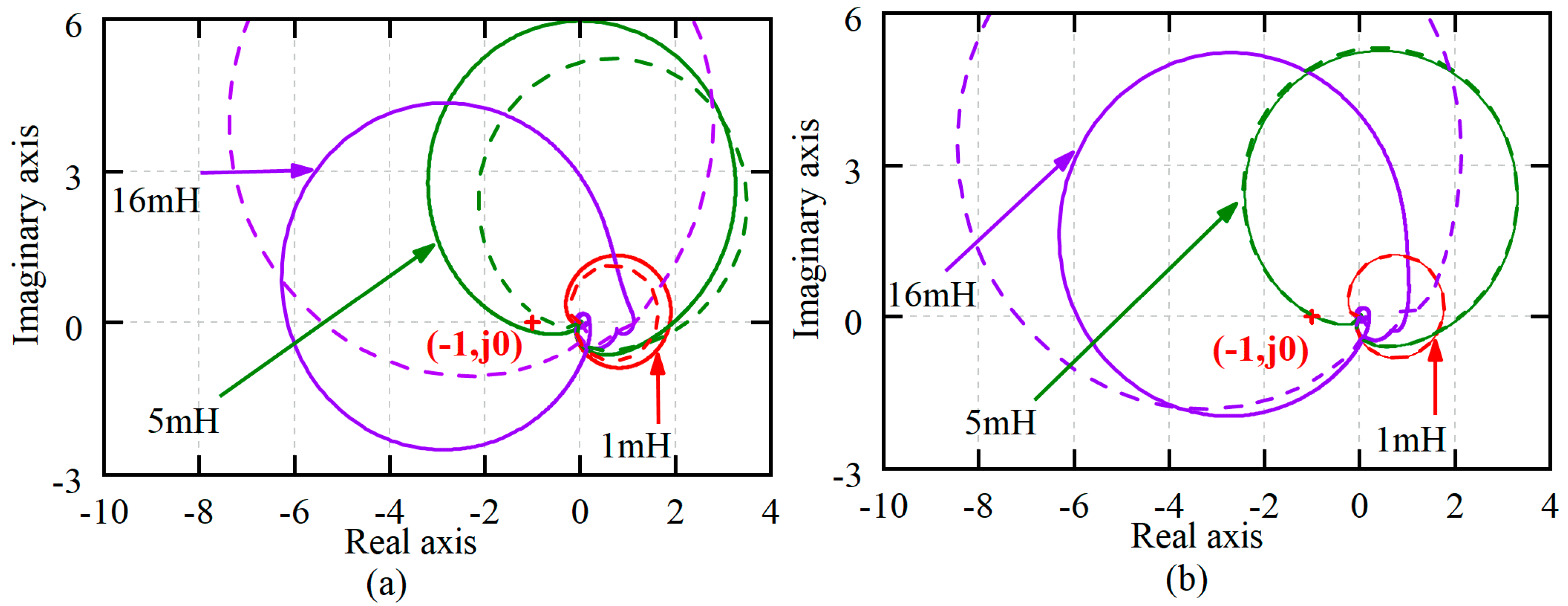
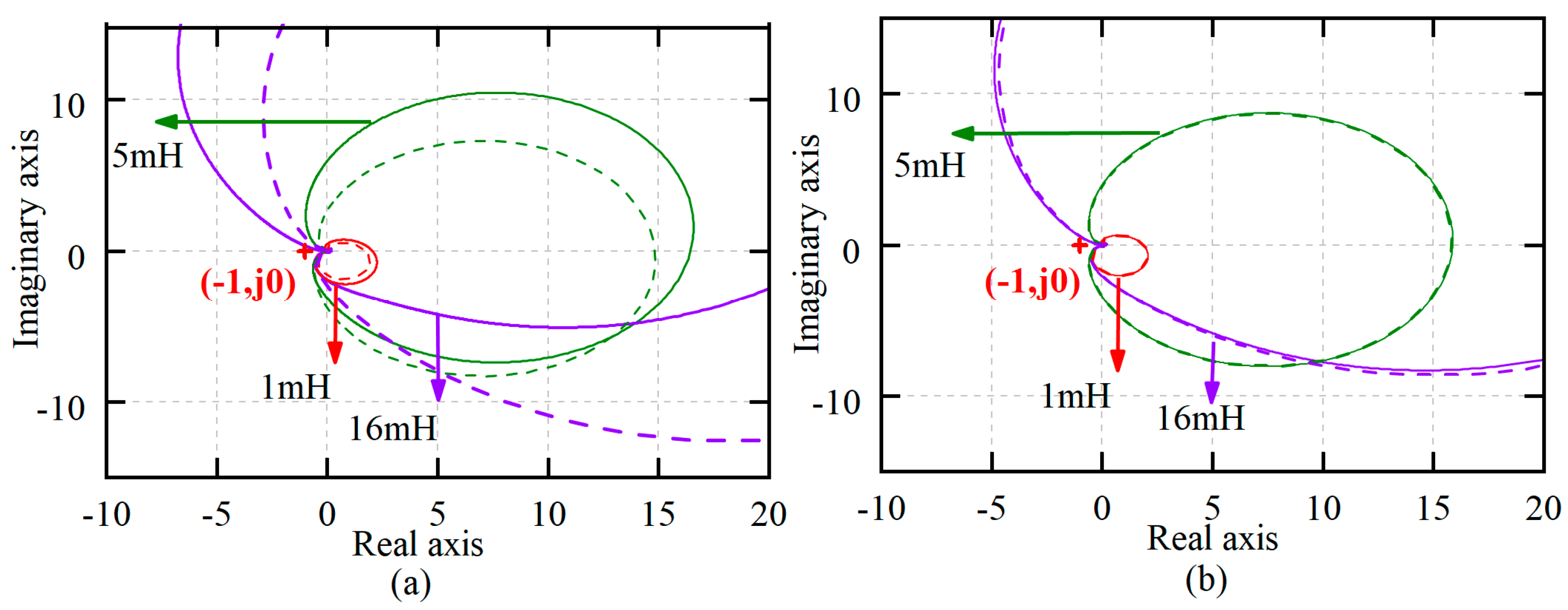
4.1. Influence of Power Grid Strength on Stability
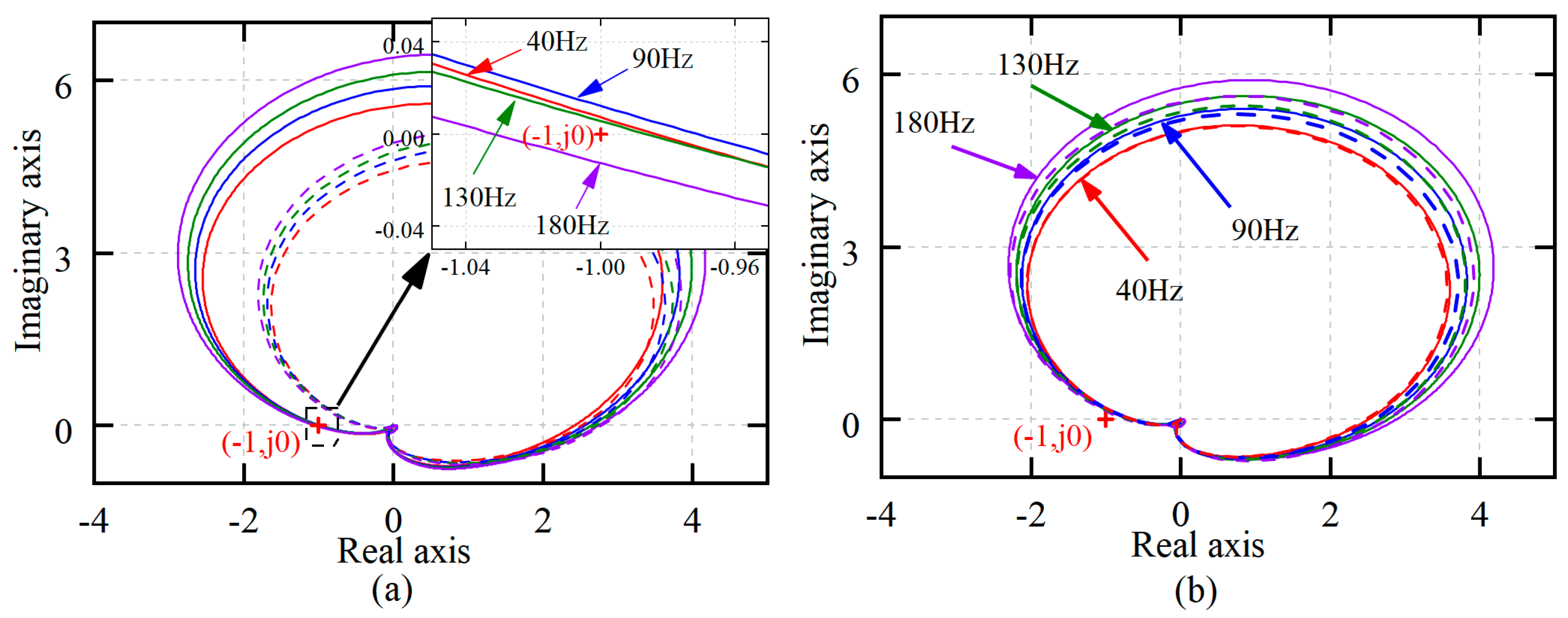
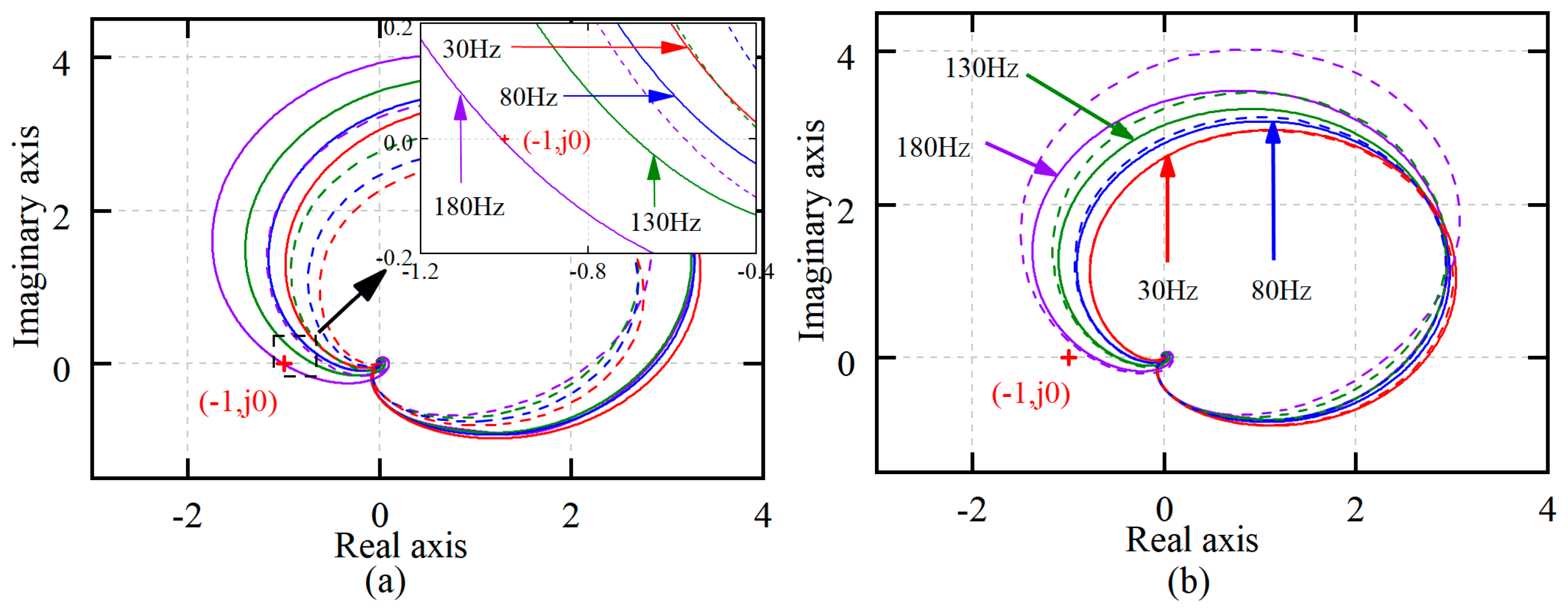
4.2. Impact of PLL Bandwidth BWPLL
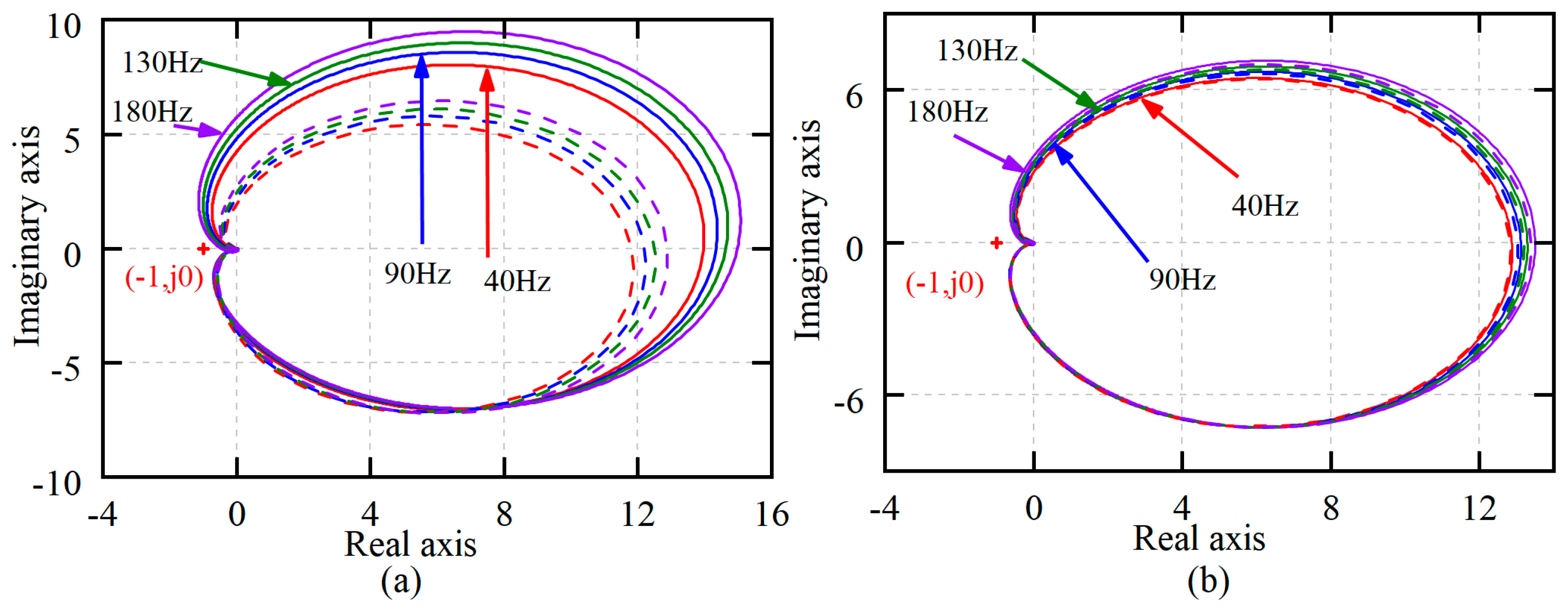
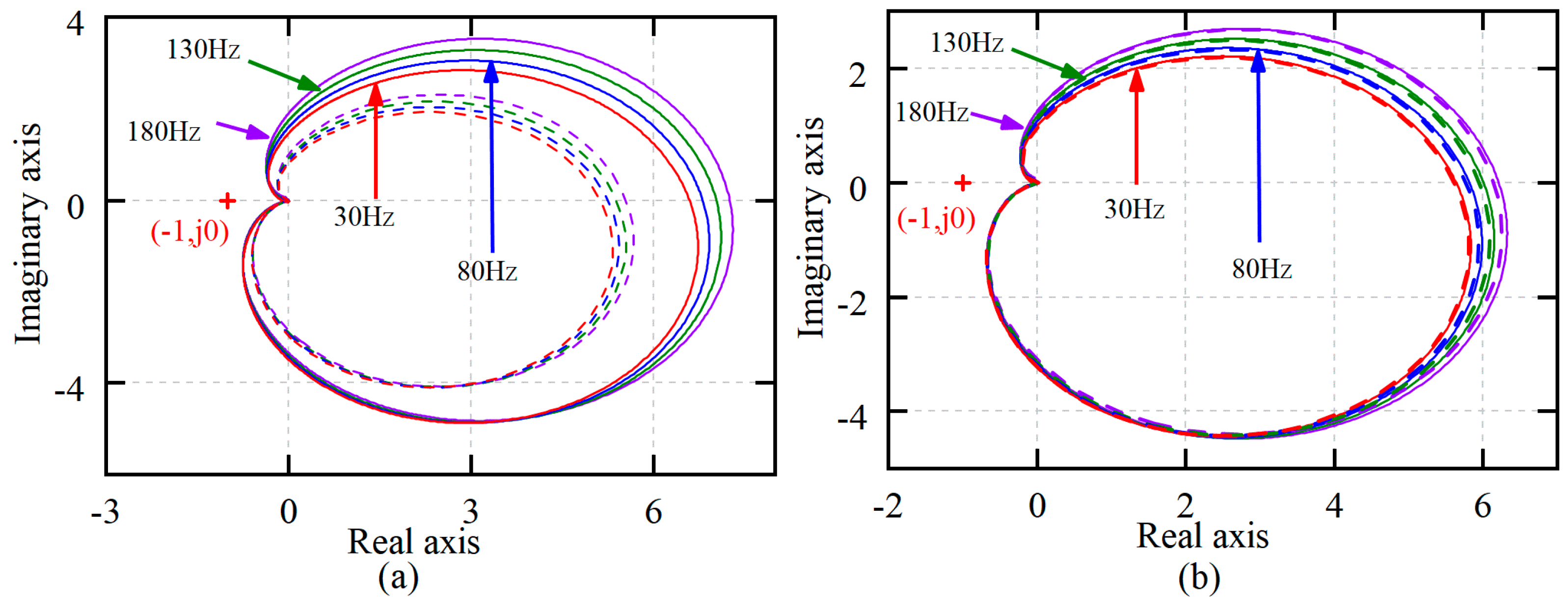
4.3. Influence of DC Voltage Loop Bandwidth BWv
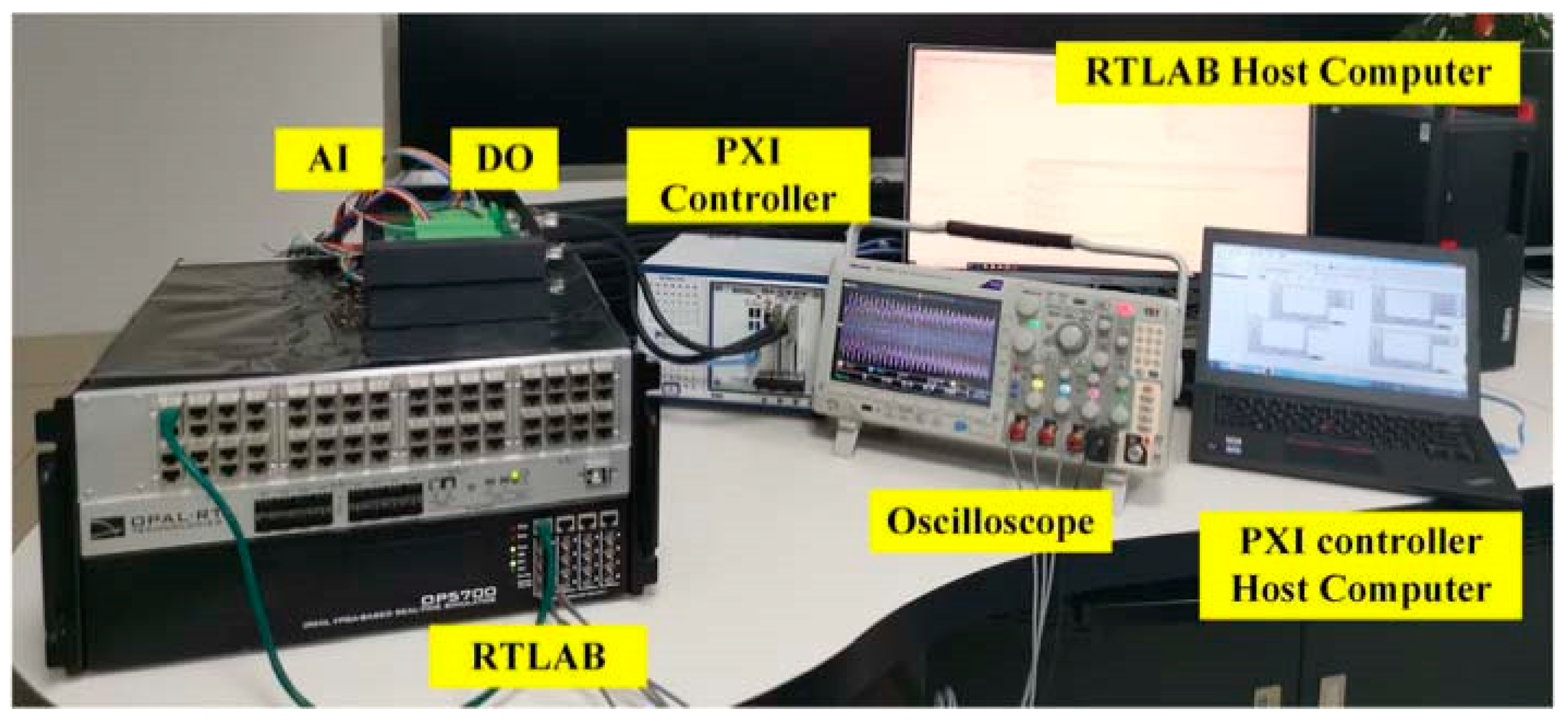
5. Experimental Verification
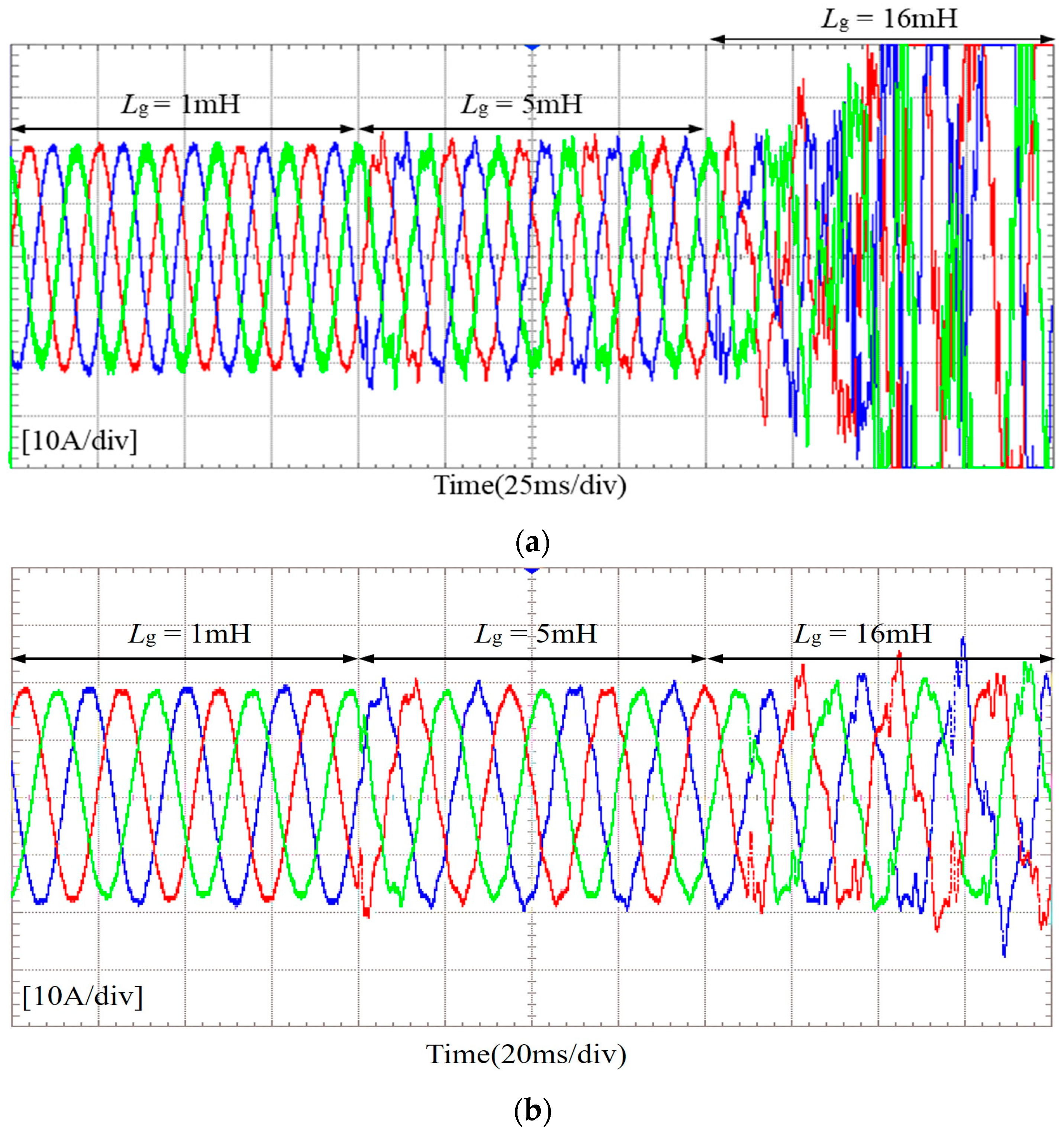
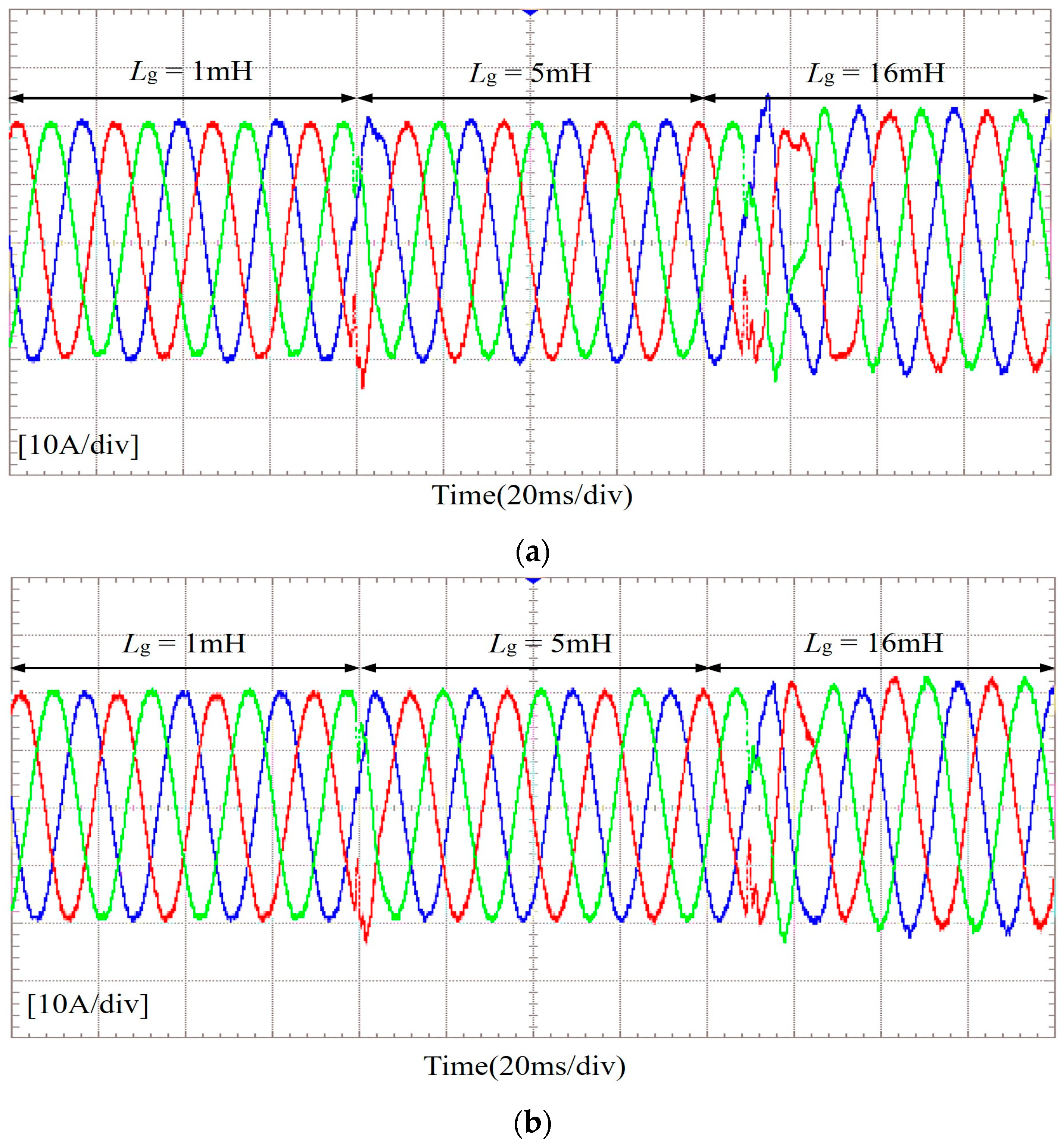
5.1. Influence of Power Grid Strength on the Stability of GCI Systems
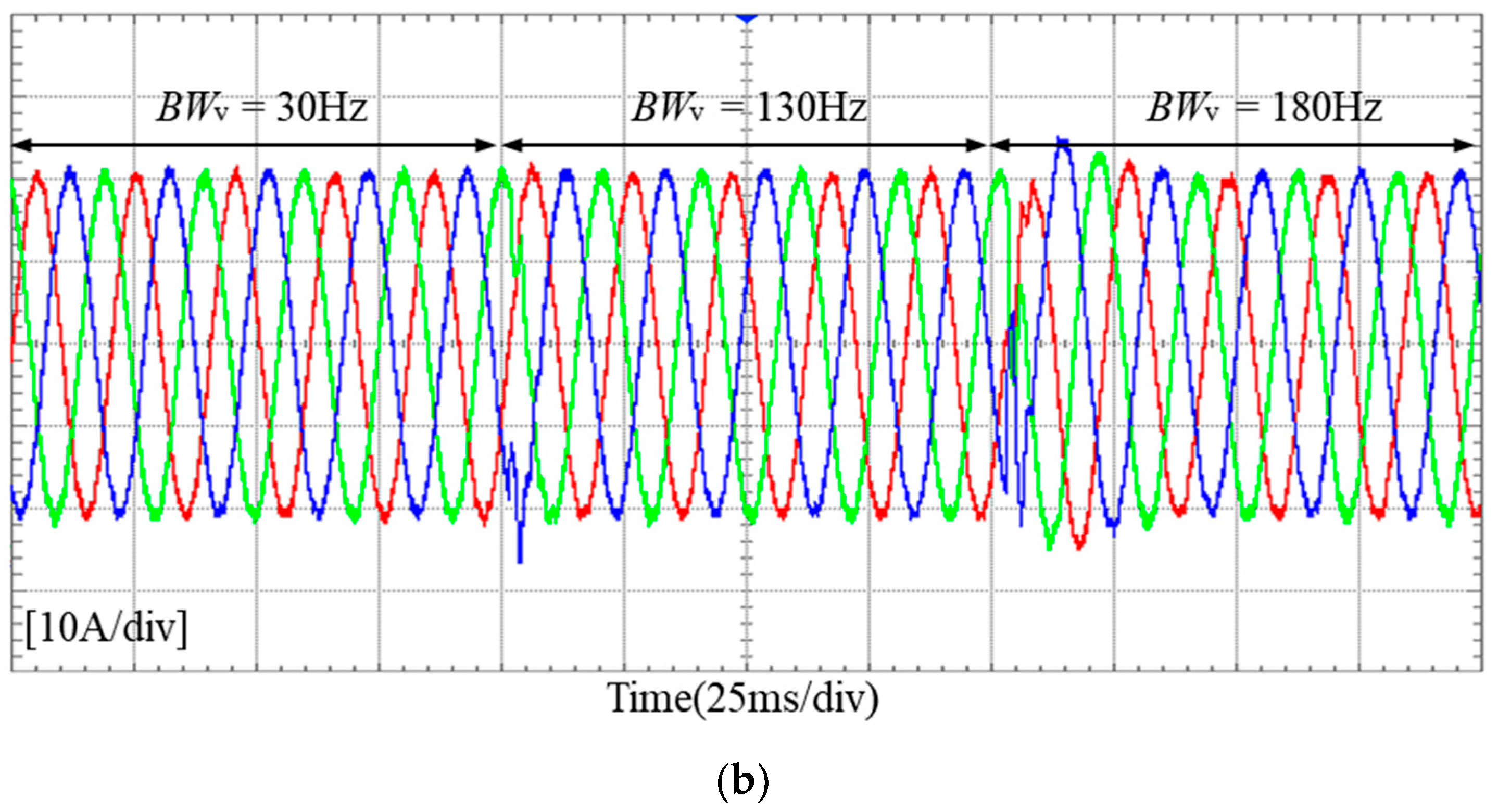
5.2. Influence of Voltage Outer Loop Bandwidth on the Stability of GCI Systems
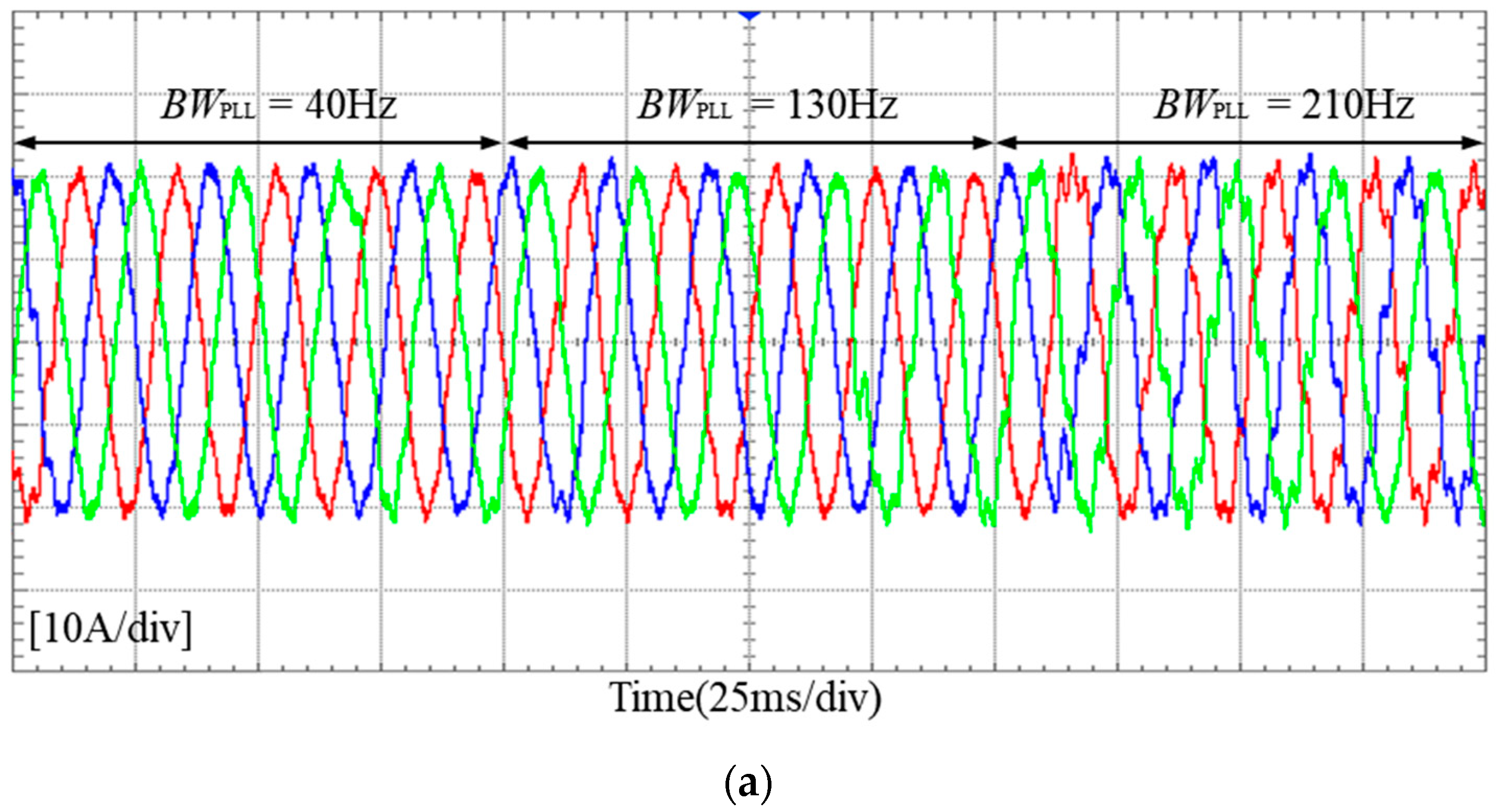
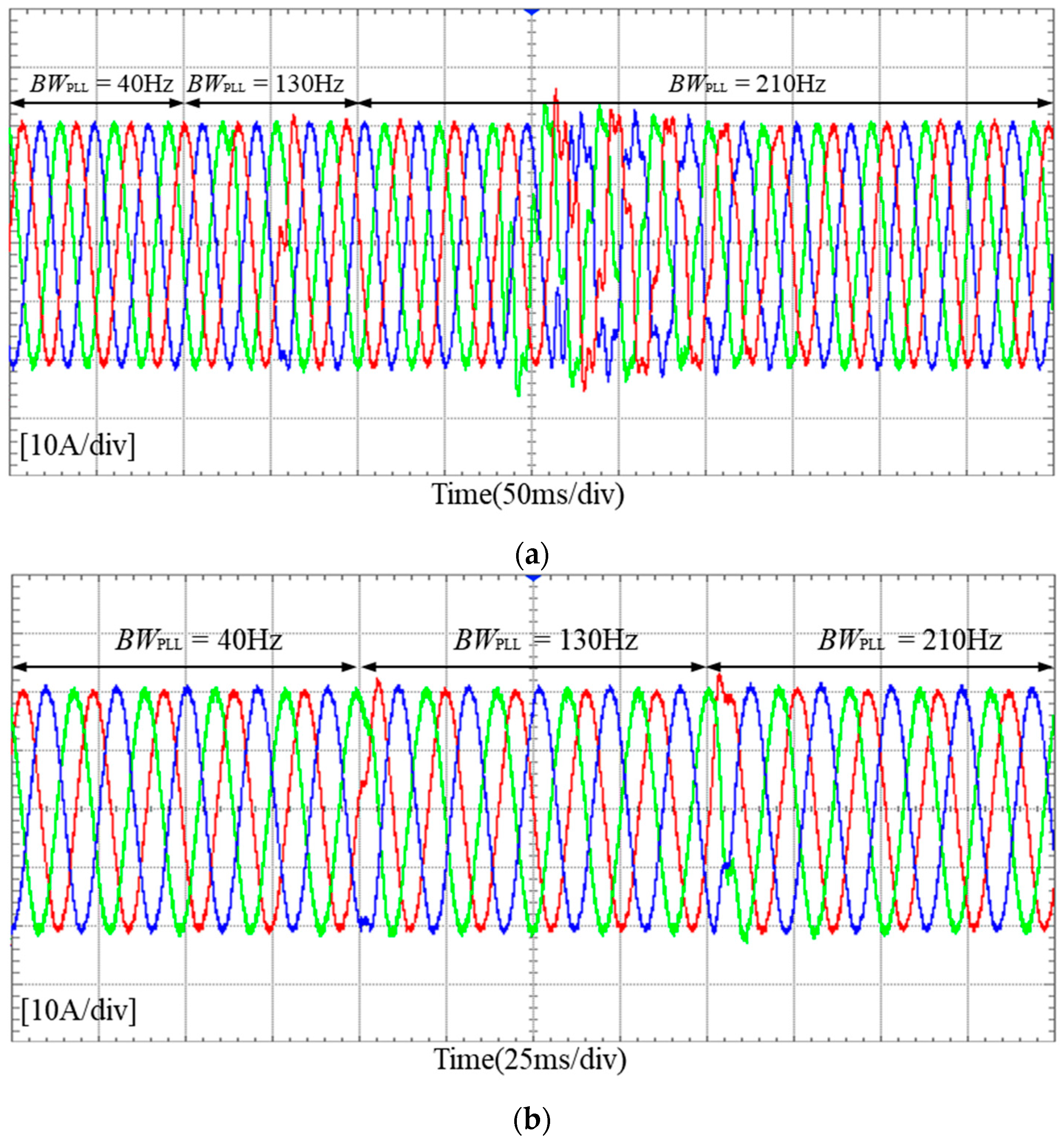
5.3. Influence of PLL Bandwidth on the Stability of GCI Systems
6. Conclusions
- (1)
- Regardless of whether voltage feedforward control is considered, adopting PI control and PR current control, considering the frequency coupling characteristics, will establish a more accurate frequency-coupled admittance model.
- (2)
- With voltage feedforward control, the admittance characteristics of GCI systems controlled by PI and PR are similar. Without voltage feedforward control, the frequency-coupled admittance models of GCI systems under PI and PR control differ significantly in the baseband.
- (3)
- To enhance the stability of the GCI system, the bandwidths of the phase-locked loop and the voltage outer loop should be minimized, provided that dynamic performance requirements are met.
- (4)
- In conditions of high penetration, voltage feedforward control diminishes the stability of GCI systems under both PI and PR control, increasing the likelihood of instability. Moreover, if a GCI system controlled by PI shows insufficient stability, employing PR control can marginally enhance stability without altering the mainline parameters and control settings.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Z.; Guo, Q.; Sun, H.; Wang, J.; Xu, Y.; Fan, M. A Distributed Transmission-Distribution-Coupled Static Voltage Stability Assessment Method Considering Distributed Generation. IEEE Trans. Power Syst. 2018, 33, 2621–2632. [Google Scholar] [CrossRef]
- Verma, P.; Seethalekshmi, K.; Dwivedi, B. A Self-Regulating Virtual Synchronous Generator Control of Doubly Fed Induction Generator-Wind Farms. IEEE Can. J. Electr. Comput. Eng. 2023, 46, 35–43. [Google Scholar] [CrossRef]
- Li, G.; Chen, Y.; Luo, A.; Wang, H. An Enhancing Grid Stiffness Control Strategy of STATCOM/BESS for Damping Sub-Synchronous Resonance in Wind Farm Connected to Weak Grid. IEEE Trans. Ind. Inform. 2020, 16, 5835–5845. [Google Scholar] [CrossRef]
- Sewdien, V.; Preece, R.; Torres, J.R.; van der Meijden, M. Systematic Procedure for Mitigating DFIG-SSR Using Phase Imbalance Compensation. IEEE Trans. Sustain. Energy 2022, 13, 101–110. [Google Scholar] [CrossRef]
- Zhou, J.Z.; Ding, H.; Fan, S.; Zhang, Y.; Gole, A.M. Impact of Short-Circuit Ratio and Phase-Locked-Loop Parameters on the Small-Signal Behavior of a VSC-HVDC Converter. IEEE Trans. Power Deliv. 2014, 29, 2287–2296. [Google Scholar] [CrossRef]
- Chen, X.; Wang, Y.; Gong, C.; Sun, J. Overview of Stability Research for Grid-Connected Inverters Based on Impedance Analysis Method. Proc. CSEE 2018, 38, 2082–2094. [Google Scholar]
- Sun, J. Impedance-Based Stability Criterion for Grid-Connected Inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Wang, X.; Harnefors, L.; Blaabjerg, F. Unified Impedance Model of Grid-Connected Voltage-Source Converters. IEEE Trans. Power Electron. 2018, 33, 1775–1787. [Google Scholar] [CrossRef]
- Qian, Q.; Xie, S.; Xu, J.; Xu, K.; Bian, S.; Zhong, N. Output Impedance Modeling of Single-Phase Grid-Tied Inverters with Capturing the Frequency-Coupling Effect of PLL. IEEE Trans. Power Electron. 2020, 35, 5479–5495. [Google Scholar] [CrossRef]
- Nian, H.; Liao, Y.; Li, M.; Sun, D.; Xu, Y.; Hu, B. Impedance Modeling and Stability Analysis of Three-Phase Four-Leg Grid-Connected Inverter Considering Zero-Sequence. IEEE Access 2021, 9, 83676–83687. [Google Scholar] [CrossRef]
- Du, Y.; Zhao, H.; Yang, X.; Jiang, W.; Su, J. Sequence Impedance Modeling of Virtual Synchronous Generator Considering Frequency Coupling Effect. J. Power Supply 2020, 18, 42–49. [Google Scholar]
- Bakhshizadeh, M.K.; Wang, X.; Blaabjerg, F.; Hjerrild, J.; Kocewiak, Ł.; Bak, C.L.; Hesselbæk, B. Couplings in Phase Domain Impedance Modeling of Grid-Connected Converters. IEEE Trans. Power Electron. 2016, 31, 6792–6796. [Google Scholar] [CrossRef]
- Heng, N.; Yunyang, X.; Liang, C.; Guanghui, L. Frequency Coupling Characteristic Modeling of Grid-connected Inverter and System Stability Analysis. Proc. CSEE 2019, 39, 1421–1432. [Google Scholar]
- Xie, Z.; Wu, W.; Chen, Y.; Gong, W. Admittance-based stability comparative analysis of grid-connected inverters with direct power control and closed-loop current control. IEEE Trans. Ind. Electron. 2021, 68, 8333–8344. [Google Scholar] [CrossRef]
- Yang, Z.; Shah, C.; Chen, T.; Yu, L.; Joebges, P.; De Doncker, R.W. Stability investigation of three-phase grid-tied PV inverter systems using impedance models. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 2672–2684. [Google Scholar] [CrossRef]
- Manoloiu, A.; Pereira, H.A.; Teodorescu, R.; Bongiorno, M.; Eremia, M.; Silva, S.R. Comparison of PI and PR current controllers applied on two-level VSC-HVDC transmission system. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 28 June–2 July 2015; pp. 1–5. [Google Scholar]
- Wen, B.; Dong, D.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Impedance-Based Analysis of Grid-Synchronization Stability for Three-Phase Paralleled Converters. IEEE Trans. Power Electron. 2016, 31, 26–38. [Google Scholar] [CrossRef]
- Xie, Z.; Chen, Y.; Wu, W.; Xu, Y.; Wang, H.; Guo, J.; Luo, A. Modeling and Control Parameters Design for Grid-Connected Inverter System Considering the Effect of PLL and Grid Impedance. IEEE Access 2020, 8, 40474–40484. [Google Scholar] [CrossRef]
- Liu, W.; Xie, X.; Zhang, X.; Li, X. Frequency-Coupling Admittance Modeling of Converter-Based Wind Turbine Generators and the Control-Hardware-in-the-Loop Validation. IEEE Trans. Energy Convers. 2019, 35, 425–433. [Google Scholar] [CrossRef]
- Wu, X.Q.; Wang, Y.C.; Chen, X.; Chen, J.; He, G.Q. Sequence Impedance Model and Interaction Stability Research of Three-phase Grid-connected Inverters with Considering Coupling Effects. Proc. CSEE 2020, 40, 1605–1616. [Google Scholar]
- Wang, H.; Xie, Z.; Chen, Y.; Wu, W.; Zhu, Z.; Gao, J. Stability enhancement control strategy for grid-connected wind power system based on composite feedforward damping. Int. J. Electr. Power Energy Syst. 2024, 158, 109908. [Google Scholar] [CrossRef]
- Gao, S.; Zhao, H.; Wang, P.; Gui, Y.; Terzija, V.; Blaabjerg, F. Comparative study of symmetrical controlled grid-connected inverters. IEEE Trans. Power Electron. 2022, 37, 3954–3968. [Google Scholar] [CrossRef]
- Wang, K.; Yuan, X.; Wang, H.; Zhang, Y.; Wu, X. Two causes of the inverter-based grid-connected system instability in weak grids. Power Syst. Technol. 2023, 47, 1230–1242. [Google Scholar]
- Xie, Z.; Chen, Y.; Wu, W.; Gong, W.; Guerrero, J.M. Stability enhancing voltage feed-forward inverter control method to reduce the effects of phase-locked loop and grid impedance. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 3000–3009. [Google Scholar] [CrossRef]
- Li, Y.; Zhiyuan, H.; Hui, P.; Yang, Y.; Weiying, H. High frequency stability analysis and suppression strategy of MMC-HVDC systems (Part I): Stability analysis. Proc. CSEE 2021, 41, 5842–5855. [Google Scholar]
- Zmood, D.N.; Holmes, D.G. Stationary frame current regulation of PWM inverters with zero steady-state error. IEEE Trans. Power Electron. 2003, 18, 814–822. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Vdc | 700 V | Ipv | 14.29 A |
| Vg | 220 V | Qref | 0 Kvar |
| Lf | 2 mH | Decoupling coefficient Kd | 1/350 |
| Cf | 20 uF | Voltage feedforward coefficient Kf | 1/350 |
| Rf | 1 Ω | PI parameter of PLL | 0.266/10.99 |
| Rg | 0.2 Ω | Voltage loop PI parameter | 1.72/228.69 |
| Lg | 3 mH | Current loop PI parameter | 0.0343/45.714 |
| ωv, ωi | 2π·4000 | KPWM | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, W.; Yin, J.; Chen, Z. Stability Comparison of Grid-Connected Inverters Considering Voltage Feedforward Control in Different Domains. Appl. Sci. 2024, 14, 9026. https://doi.org/10.3390/app14199026
Qian W, Yin J, Chen Z. Stability Comparison of Grid-Connected Inverters Considering Voltage Feedforward Control in Different Domains. Applied Sciences. 2024; 14(19):9026. https://doi.org/10.3390/app14199026
Chicago/Turabian StyleQian, Weichen, Jun Yin, and Ziang Chen. 2024. "Stability Comparison of Grid-Connected Inverters Considering Voltage Feedforward Control in Different Domains" Applied Sciences 14, no. 19: 9026. https://doi.org/10.3390/app14199026