
Research on Collision Warning Method for Ship-Bridge Based on Safety Potential Field

Abstract
1. Introduction
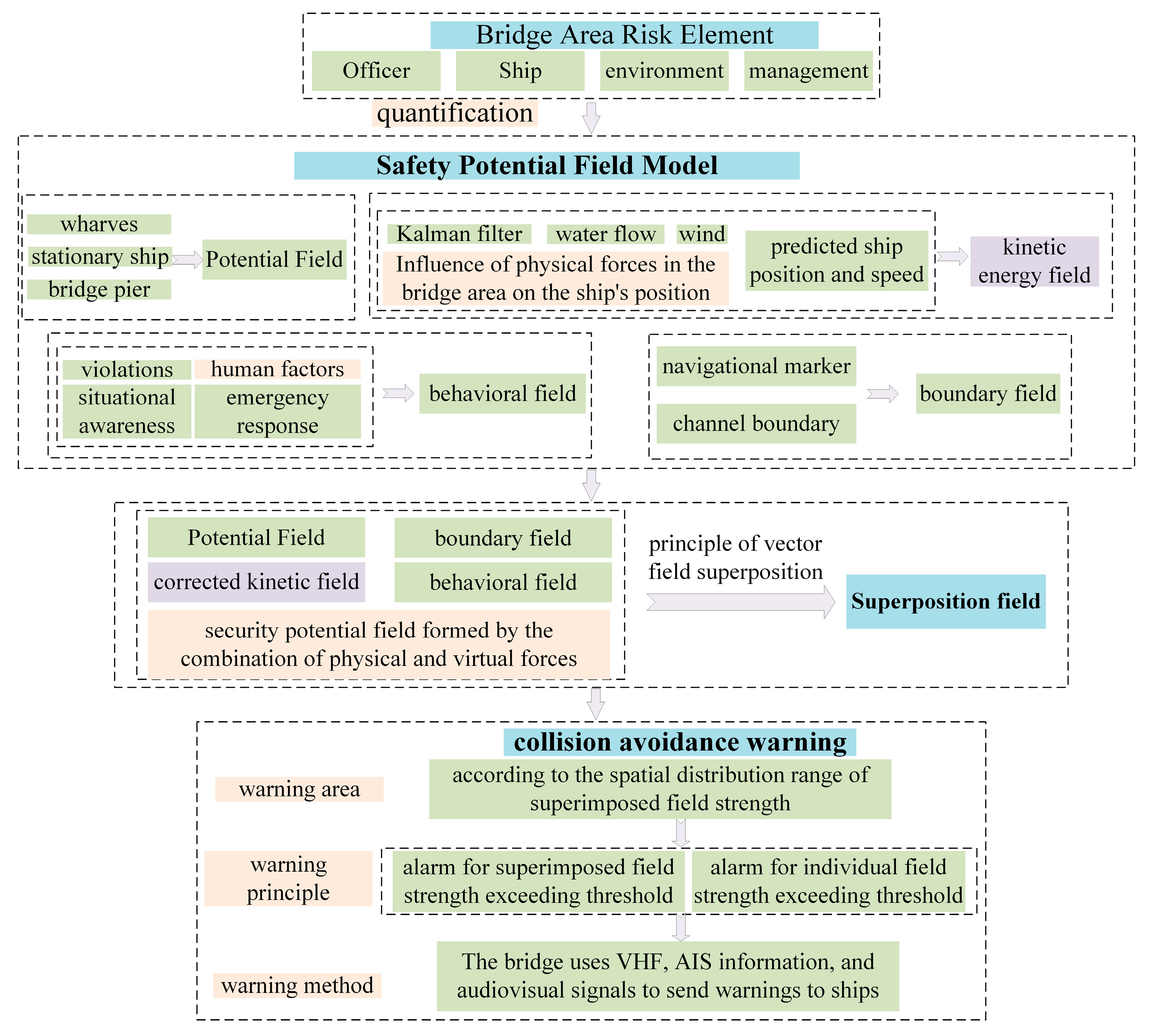
2. Description and Early Warning Framework of the Safety Potential Field in the Bridge Area
2.1. Description of the Safety Potential Field in the Bridge Area
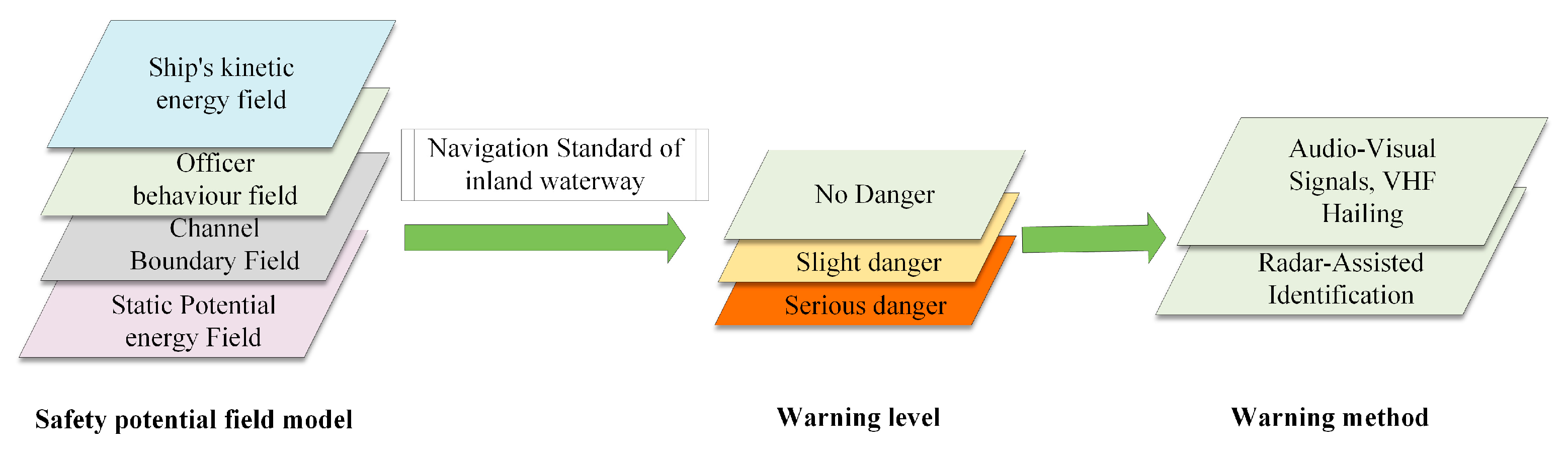
2.2. Ship–Bridge Collision Prevention Warning Framework
3. Establishment of Safety Potential Field Model in Bridge Area
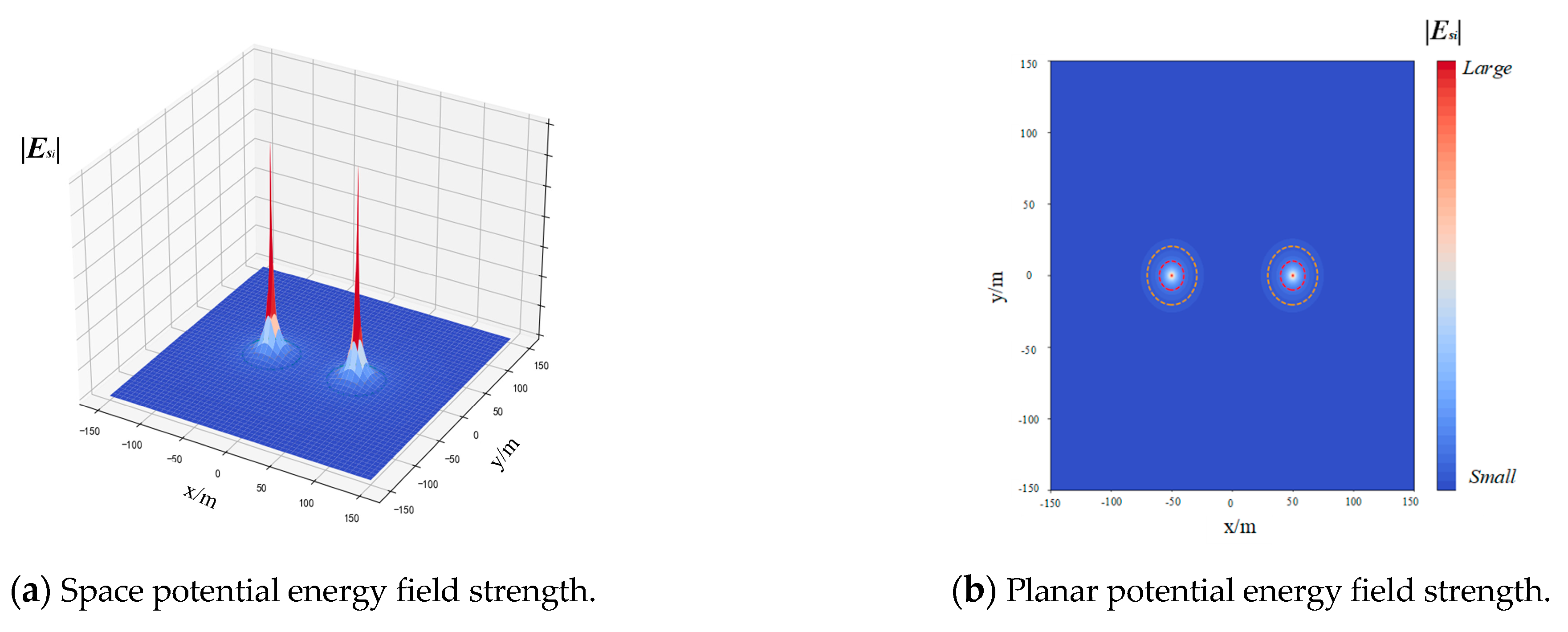
3.1. Static Elemental Potential Energy Field
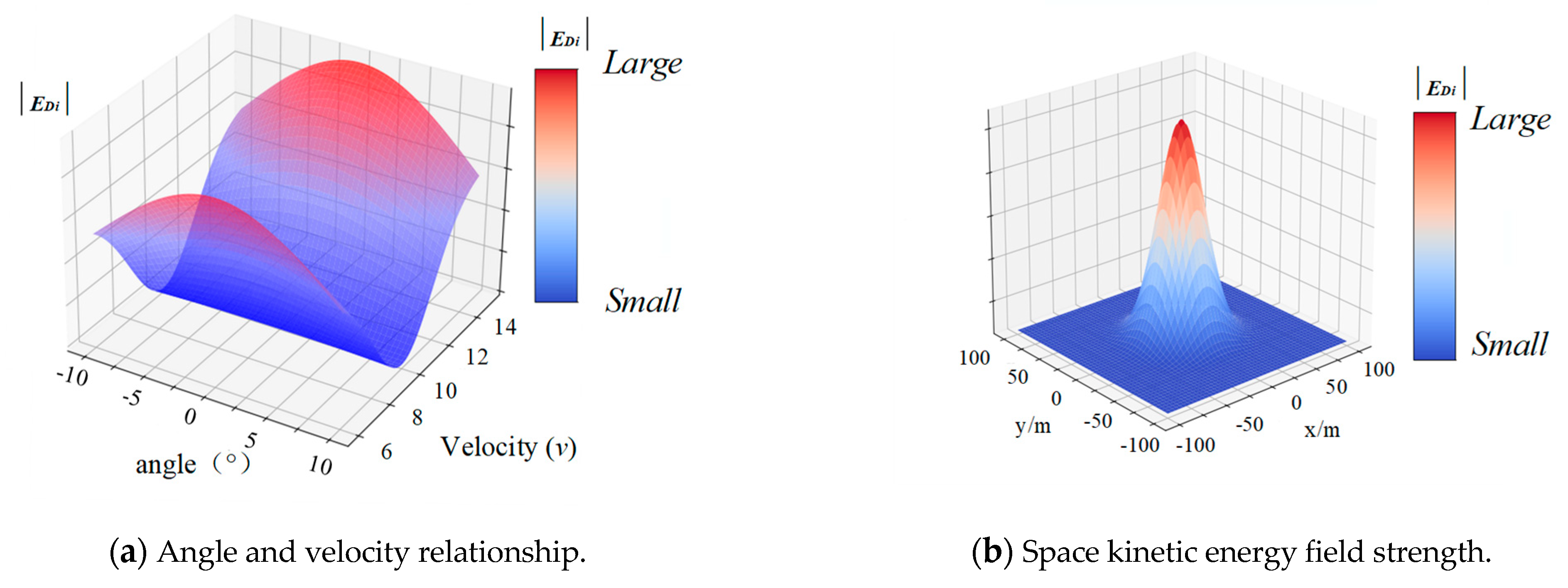
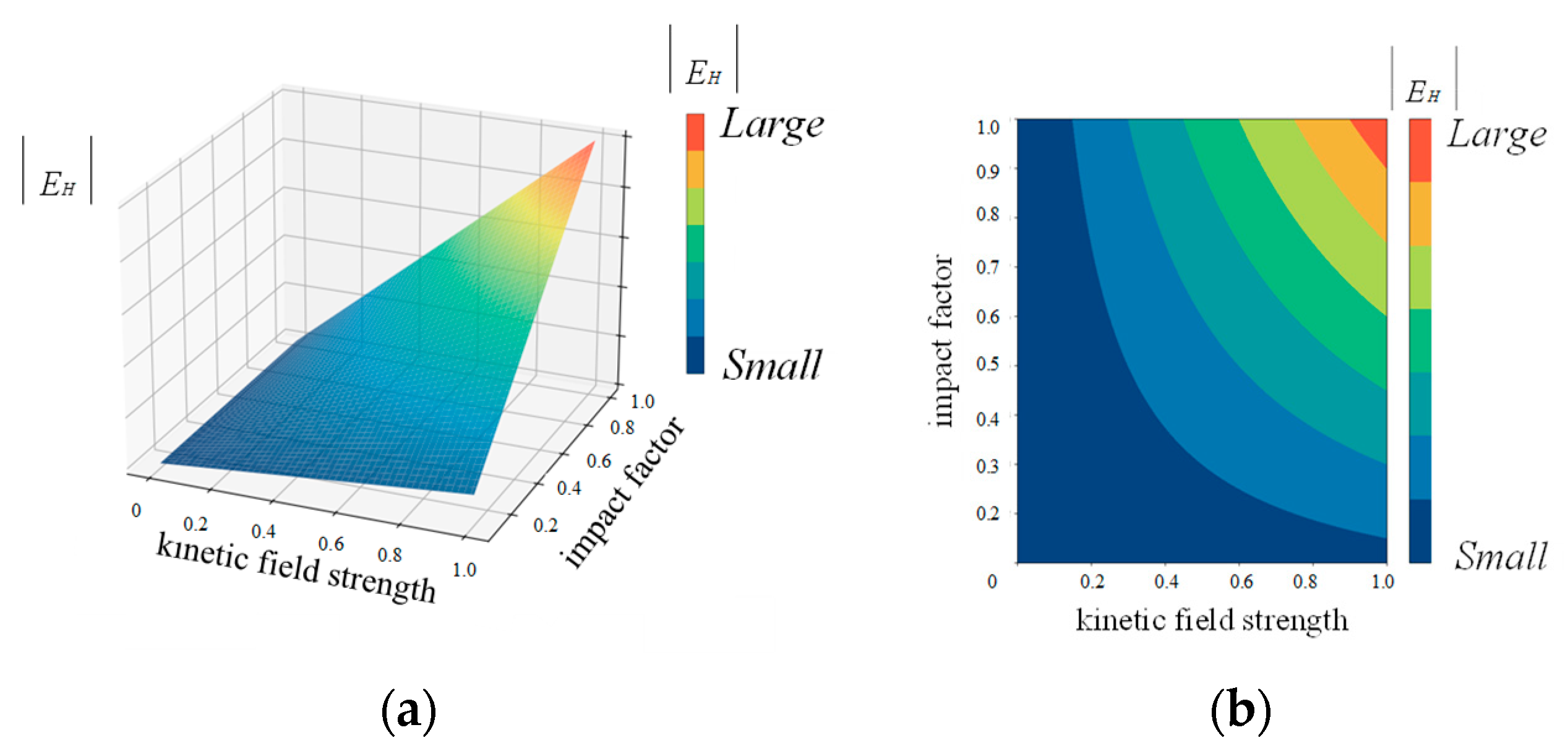
3.2. Dynamic Ship Kinetic Energy Field
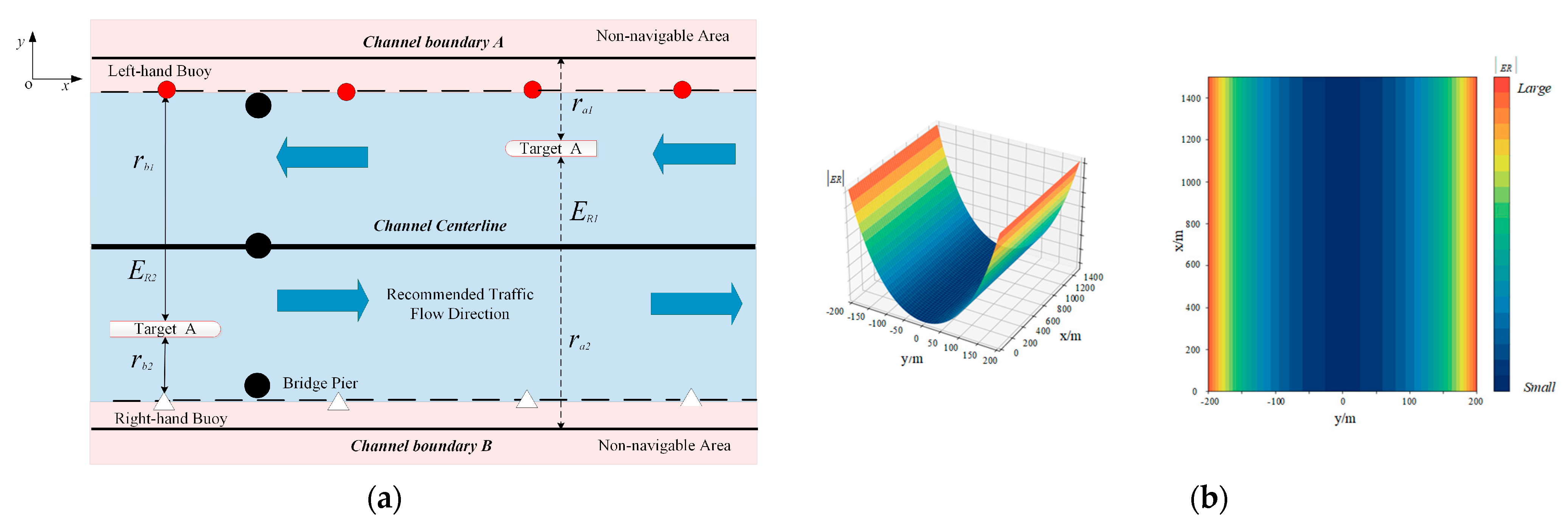
3.3. Channel Boundary Potential Field
- The safety distance from the outboard side of the cargo ship to the edge of the fairway may be taken as 0.34~0.40 times the width of the track zone, and the safety distance between the outboard side of the ship and the embankment of the fairway, as follows:
- Safe distance between the ship’s outboard side and the navigational markers, as follows:
- The boundary field schematic, which is shown in Figure 4.
3.4. Behavioural Fields Based on Crew Behaviour
3.5. Superposition Field Model
4. Vessel Warning for Bridge Area Based on Vessel Posture
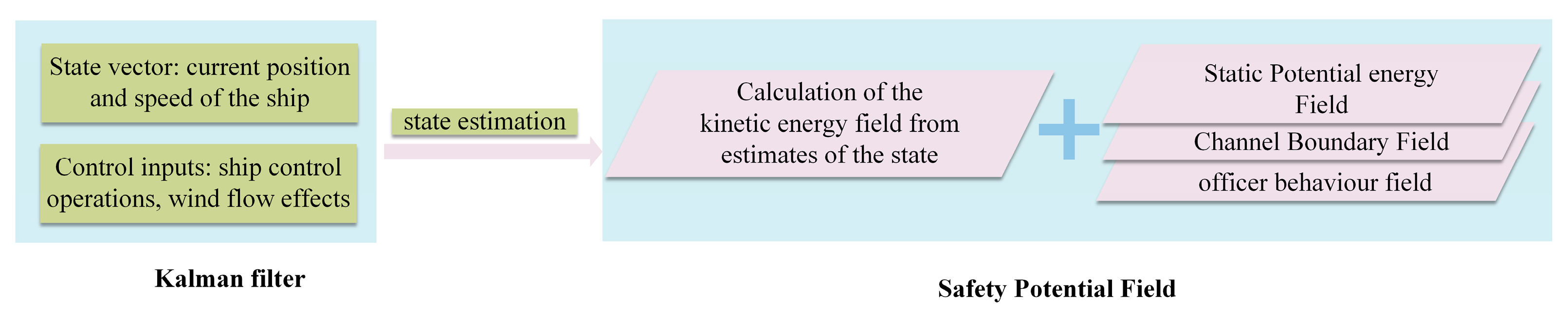
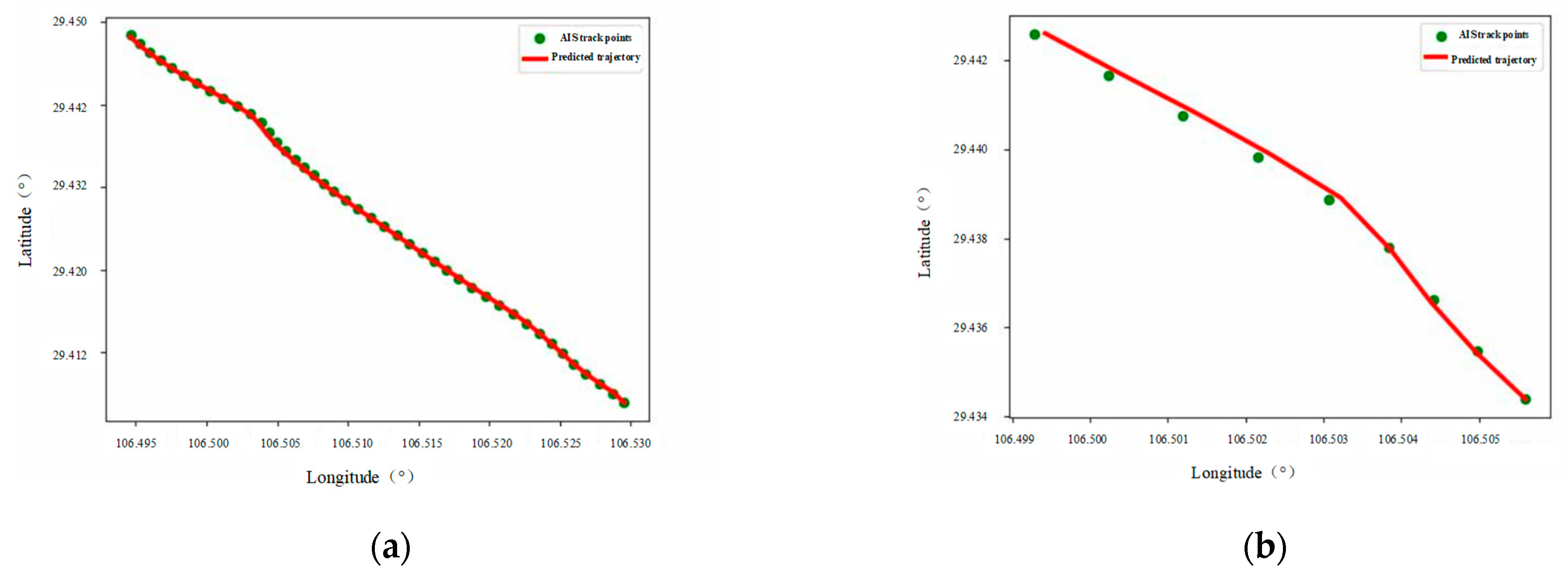
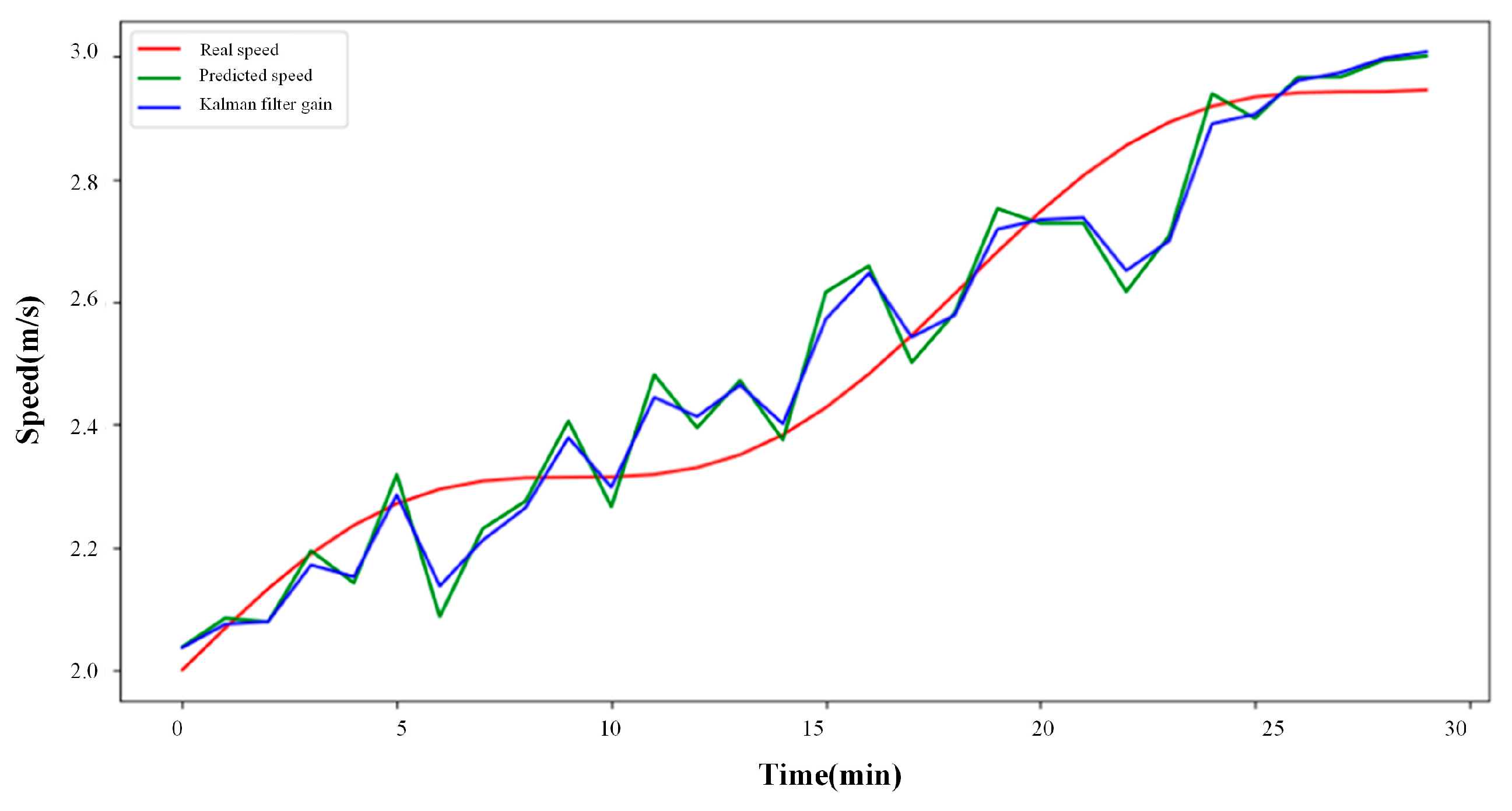
4.1. Ship State Prediction Based on Kalman Filtering
- Step 1: Establish the ship motion model and observation model. The transfer function is constructed through physical principles to form the ship motion process model and observation model expressed in state space.
- Step 2: Use the established motion process model and observation model to predict the ship’s state and observation values at the next moment. The ship state quantities (position and speed) at the current moment are taken as inputs, the state at the next moment is estimated by the motion process model, and the observation values at the next moment are obtained by combining the observation model.
- Step 3: Correct the predicted values in step 2 based on the measured values of the ship state acquired by the sensors. The error between the measured value and the predicted value is calculated and the predicted value is corrected by Kalman gain K, including the estimation of the speed.
- Step 4: Repeat steps 2 and 3 to obtain the ship state measurements at each moment by continuous iteration, thereby realising the prediction of the ship trajectory and speed. The computational formulae used in the above steps are as follows:
4.2. Real-Time Early Warning Method for the Safety Potential Field of a Bridge Area
- : is the safe potential field range of the first level of warning, is the predicted composite field strength at the next moment, and is the superimposed field strength of the current ship position. If the predicted field strength is less than the current field strength, this indicates that the ship’s navigation in the bridge area is safe and that there is no danger of hitting obstacles such as bridge abutments or the navigation channel. This is part of level 1 and is not dangerous;
- : is the potential field range for a level 2 warning. Here, the predicted field strength is stronger than the current field strength, indicating that there is a possibility of the vessel impacting the bridge elements. However, as the predicted field strength is still within the range, this indicates that the current situation in the bridge area has not yet reached the level of urgency and is classified as level 2, or a slight hazard;
- : is the potential field range for a level 3 warning. Here, the predicted field strength value continues to increase and is within the range of a level 3 warning, indicating that the ship’s danger to the bridge area is increasing and has reached a degree of urgency that is of the third level, serious danger, as shown in Figure 11.
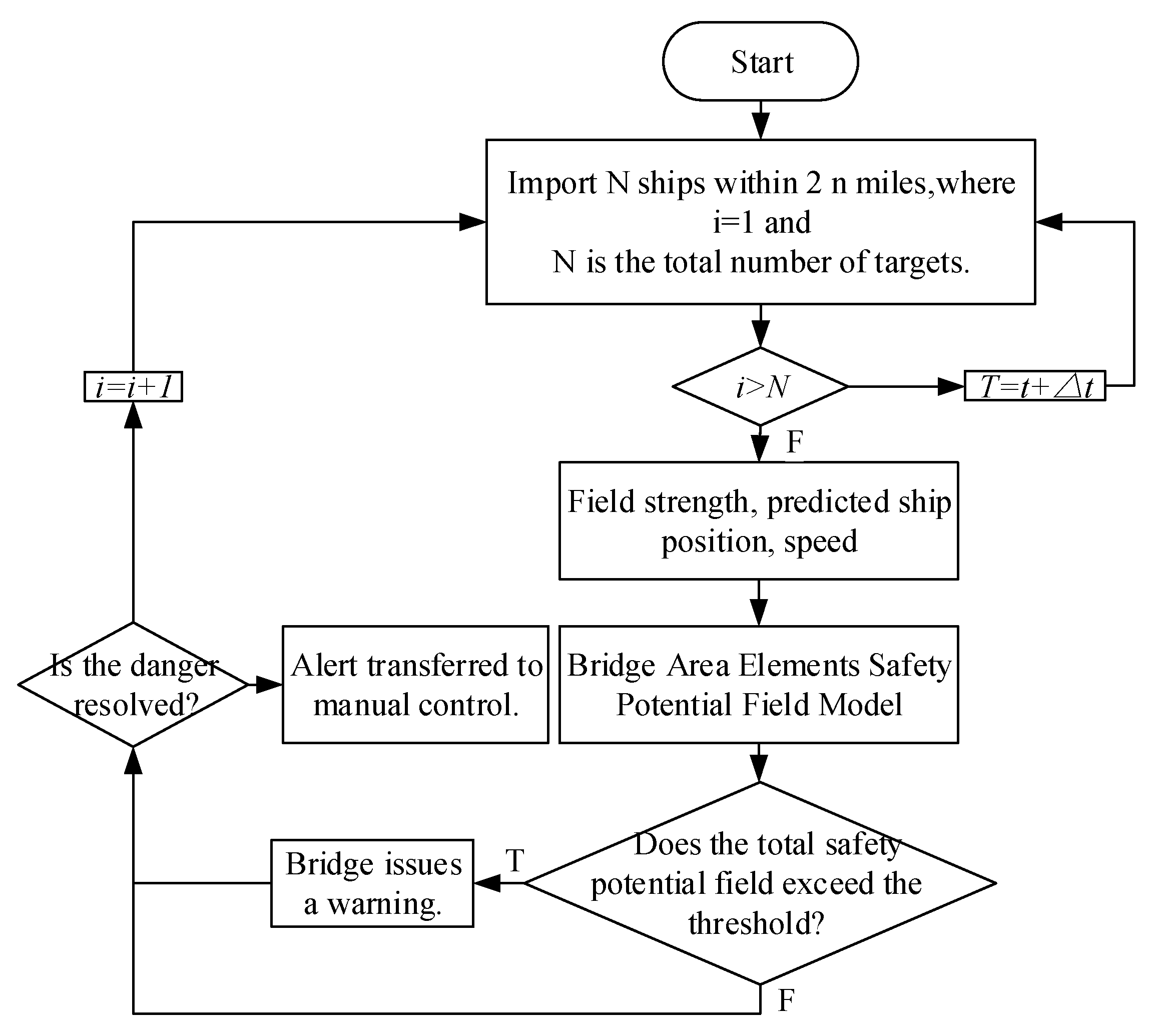
- Step 1: Data collection: collect the environmental data and the real-time dynamic data of ships within 2 nautical miles and number each ship through a VTS, AIS and video monitoring system in the bridge area;
- Step 2: Take out the ship numbered i (i = 1,2,3,…N), calculate the field strength at the current moment based on the ship’s current position information, heading information, and speed information, and predict the ship’s movement position and speed after 2 min;
- Step 3: The predicted position, velocity, and other data are passed into a safe potential field model consisting of bridge zone elements;
- Step 4: Determine whether the integrated safety potential field exceeds the threshold by comprehensively evaluating all potential fields and determining whether the overall safety potential field exceeds the threshold;
- Step 5: Update cycle: As time passes (T = t + ∆t), repeat steps 1 to 5 and continue to judge the next ship i + 1.
5. Simulation Experiments
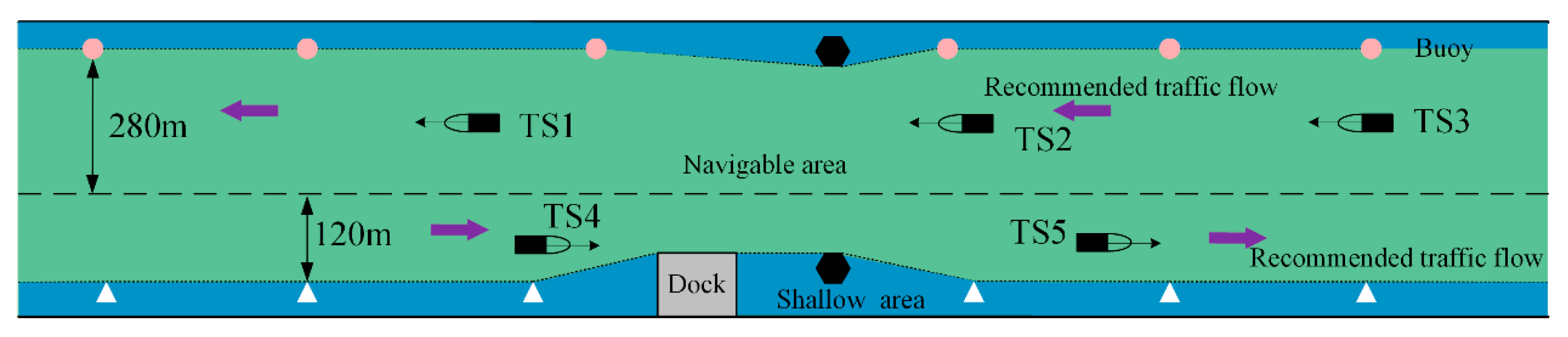
5.1. Experimental Setup
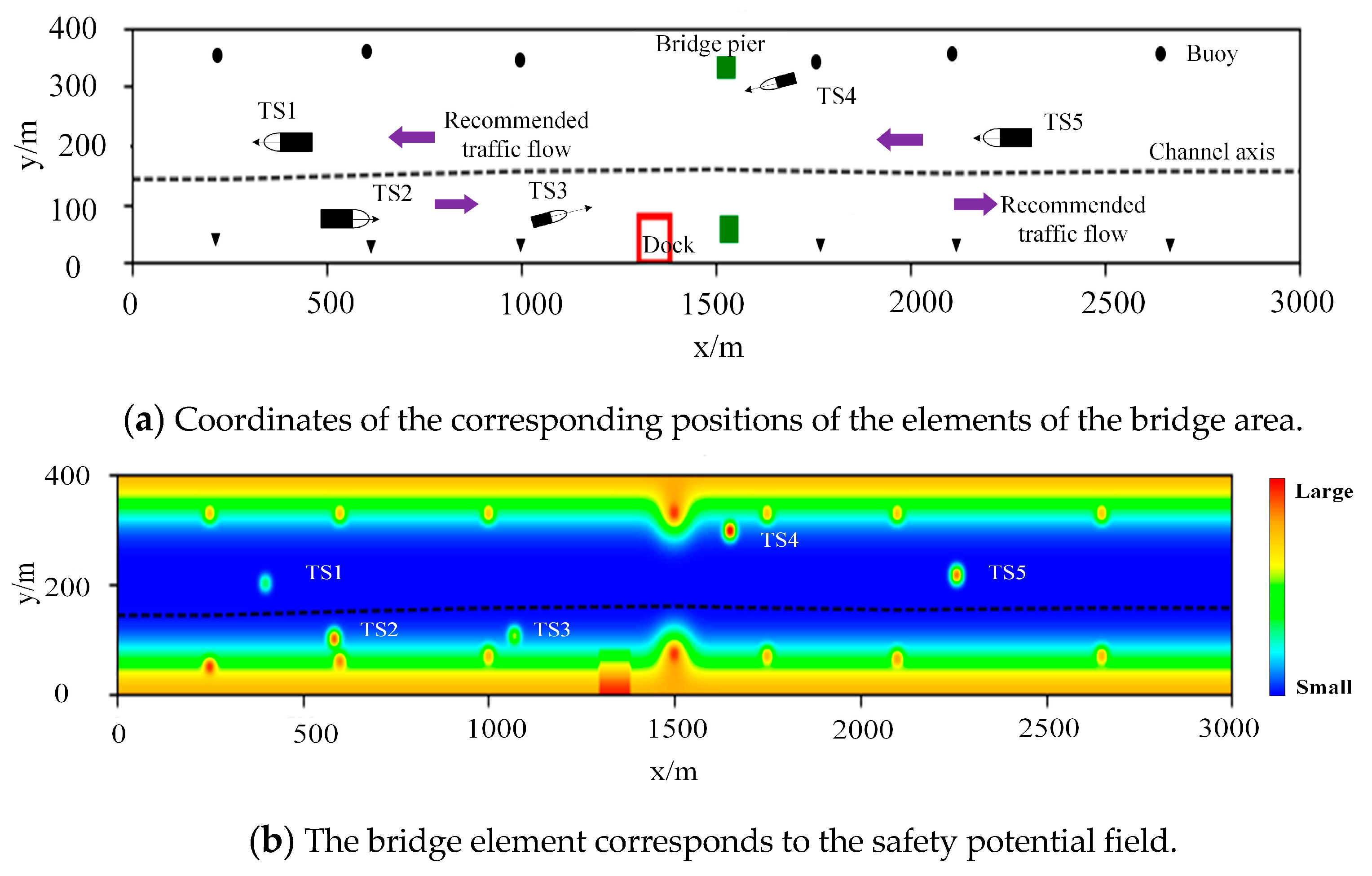
5.2. Bridge Area Safety Potential Field Experiment
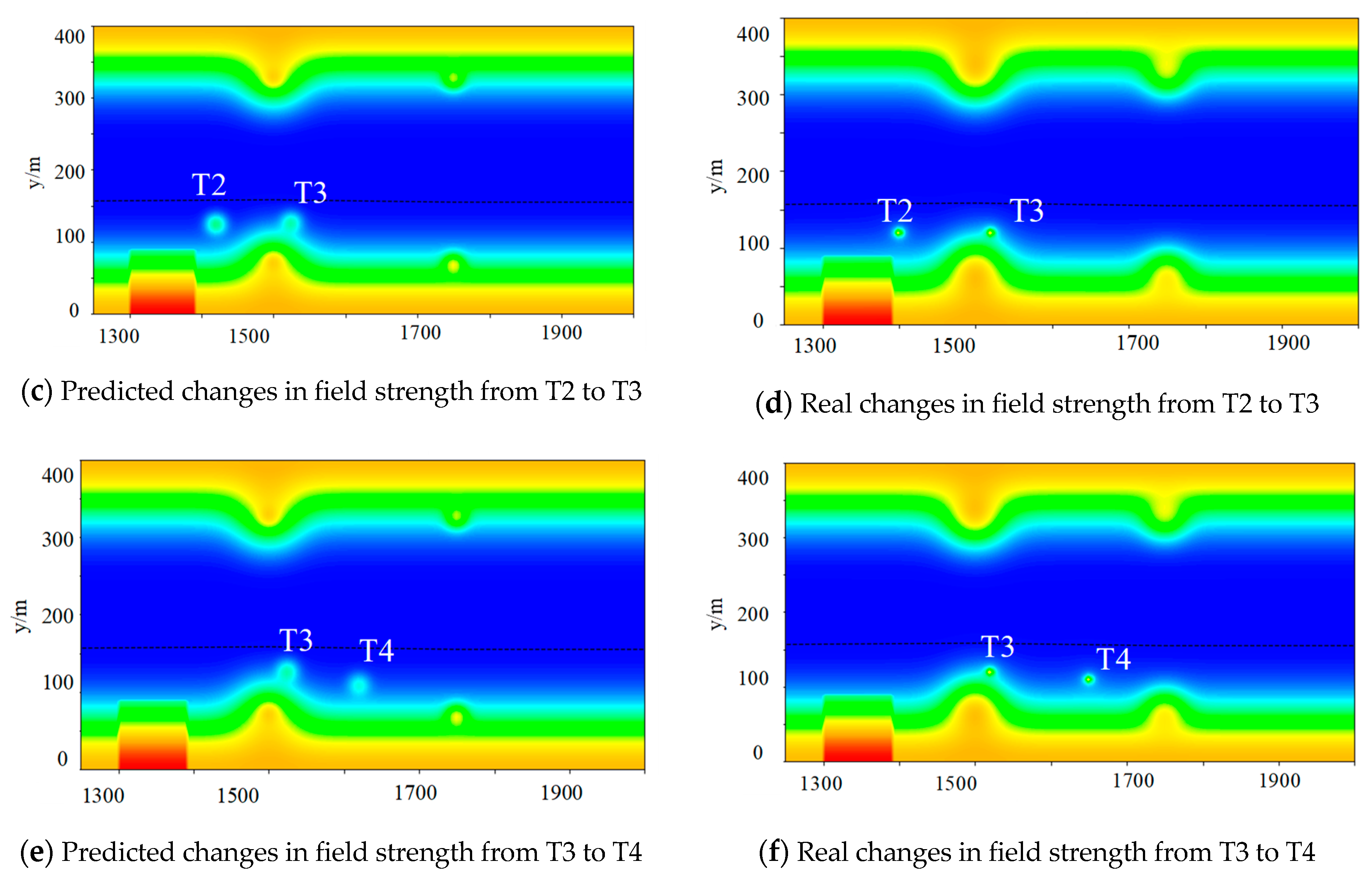
5.3. Bridge Area Early Warning Experiment
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Review of Maritime Transport 2019 | UNCTAD. Available online: https://unctad.org/publication/review-maritime-transport-2019 (accessed on 16 July 2024).
- van Westrenen, F.; Baldauf, M. Improving Conflicts Detection in Maritime Traffic: Case Studies on the Effect of Traffic Complexity on Ship Collisions. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2020, 234, 209–222. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, L.; Shu, Y.; Zhu, W. Evaluation Model and Management Strategy for Reducing Pollution Caused by Ship Collision in Coastal Waters. Ocean Coast. Manag. 2021, 203, 105446. [Google Scholar] [CrossRef]
- Ma, W.; Zhu, Y.; Grifoll, M.; Liu, G.; Zheng, P. Evaluation of the Effectiveness of Active and Passive Safety Measures in Preventing Ship–Bridge Collision. Sensors 2022, 22, 2857. [Google Scholar] [CrossRef]
- Zhang, W.Z.; Pan, J.; Sanchez, J.C.; Li, X.B.; Xu, M.C. Review on the Protective Technologies of Bridge against Vessel Collision. Thin-Walled Struct. 2024, 201, 112013. [Google Scholar] [CrossRef]
- AASHTO: Commentary for Vessel Collision Design of Highway Bridges. Available online: https://scholar.google.com/scholar_lookup?title=Guide%20Specifications%20and%20Commentary%20for%20Vessel%20Collision%20Design%20of%20Highway%20Bridges&author=AASHTO&publication_year=2009 (accessed on 17 July 2024).
- Chen, W.; Wang, Y.G.; Li, W.; Yang, L.M.; Liu, J.; Dong, X.L.; Zhu, H.H.; Wang, F. An Adaptive Arresting Vessel Device for Protecting Bridges over Non-Navigable Water against Vessel Collision. Eng. Struct. 2021, 237, 112145. [Google Scholar] [CrossRef]
- Fan, W.; Yuan, W.; Chen, B. Steel Fender Limitations and Improvements for Bridge Protection in Ship Collisions. J. Bridge Eng. 2015, 20, 06015004. [Google Scholar] [CrossRef]
- Xie, R.; Fan, W.; He, Y.; Liu, B.; Shao, X. Crushing Behavior and Protective Performance of Varying Cores in UHPFRC-Steel-Foam Sandwich Structures: Experiment, Optimal Selection and Application. Thin-Walled Struct. 2022, 172, 108886. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, R.; Liu, S.; Zhai, X.; Zhi, X. Energy Absorption Behaviour of an Aluminium Foam-Filled Circular-Triangular Nested Tube Energy Absorber under Impact Loading. Structures 2021, 34, 95–104. [Google Scholar] [CrossRef]
- Zhu, G.; Zhao, Z.; Hu, P.; Luo, G.; Zhao, X.; Yu, Q. On Energy-Absorbing Mechanisms and Structural Crashworthiness of Laterally Crushed Thin-Walled Structures Filled with Aluminum Foam and CFRP Skeleton. Thin-Walled Struct. 2021, 160, 107390. [Google Scholar] [CrossRef]
- Zhu, L.; Liu, W.; Fang, H.; Chen, J.; Zhuang, Y.; Han, J. Design and Simulation of Innovative Foam-Filled Lattice Composite Bumper System for Bridge Protection in Ship Collisions. Compos. Part B Eng. 2019, 157, 24–35. [Google Scholar] [CrossRef]
- Wang, J.J.; Song, Y.C.; Wang, W.; Chen, C.J. Evaluation of Flexible Floating Anti-Collision Device Subjected to Ship Impact Using Finite-Element Method. Ocean Eng. 2019, 178, 321–330. [Google Scholar] [CrossRef]
- Ge, J.; Luo, T.; Qiu, J. Discretized Macro-Element Method to Evaluate the Crushing Behavior and Protective Performance of Crashworthy Devices under Ship Collisions. Ocean Eng. 2024, 306, 118125. [Google Scholar] [CrossRef]
- Gholipour, G.; Zhang, C.; Mousavi, A.A. Nonlinear Numerical Analysis and Progressive Damage Assessment of a Cable-Stayed Bridge Pier Subjected to Ship Collision. Mar. Struct. 2020, 69, 102662. [Google Scholar] [CrossRef]
- Pan, J.; Wang, Y.; Xu, M.C. Impact Scenario Models of Ship-Bridge Collision Based on AIS Data. In Proceedings of the 28th International Ocean and Polar Engineering Conference, Sapporo, Japan, 10–15 June 2018; Available online: https://scholar.google.com/scholar_lookup?title=Impact%20scenario%20models%20of%20ship-bridge%20collision%20based%20on%20AIS%20data&publication_year=2018&author=J.%20Pan&author=Y.%20Wang&author=M.%20Xu (accessed on 18 July 2024).
- Zhang, L.; Chen, P.; Li, M.; Chen, L.; Mou, J. A Data-Driven Approach for Ship-Bridge Collision Candidate Detection in Bridge Waterway. Ocean Eng. 2022, 266, 113137. [Google Scholar] [CrossRef]
- Wang, X.; Zheng, Z.; You, J.; Qin, Y.; Xia, W.; Zhou, Y. BOPVis: Bridge Monitoring Data Visualization for Operational Performance Mining. Appl. Sci. 2024, 14, 6615. [Google Scholar] [CrossRef]
- Perera, L.P.; Guedes Soares, C. Collision Risk Detection and Quantification in Ship Navigation with Integrated Bridge Systems. Ocean Eng. 2015, 109, 344–354. [Google Scholar] [CrossRef]
- Frangopol, D.M.; Dong, Y.; Sabatino, S. Bridge Life-Cycle Performance and Cost: Analysis, Prediction, Optimisation and Decision-Making. In Structures and Infrastructure Systems; Routledge: London, UK, 2017. [Google Scholar]
- Larsen, O.D. Ship Collision with Bridges: The Interaction between Vessel Traffic and Bridge Structures; IABSE: Zurich, Switzerland, 1993; Volume 4. [Google Scholar]
- Hörteborn, A.; Ringsberg, J.W. A Method for Risk Analysis of Ship Collisions with Stationary Infrastructure Using AIS Data and a Ship Manoeuvring Simulator. Ocean Eng. 2021, 235, 109396. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, B.; Zhang, M.; Wang, H.; Fu, X. A Quantitative Method for the Analysis of Ship Collision Risk Using AIS Data. Ocean Eng. 2023, 272, 113906. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, X. Study on Risk of Ship Collision in Bridge Life-Cycle Based on Synergetic Theory. Ocean Eng. 2023, 289, 116148. [Google Scholar] [CrossRef]
- Chen, P.; Huang, Y.; Mou, J.; van Gelder, P.H.A.J.M. Probabilistic Risk Analysis for Ship-Ship Collision: State-of-the-Art. Saf. Sci. 2019, 117, 108–122. [Google Scholar] [CrossRef]
- Aydin, M.; Akyuz, E.; Turan, O.; Arslan, O. Validation of Risk Analysis for Ship Collision in Narrow Waters by Using Fuzzy Bayesian Networks Approach. Ocean Eng. 2021, 231, 108973. [Google Scholar] [CrossRef]
- Wu, B.; Yip, T.L.; Yan, X.; Guedes Soares, C. Fuzzy Logic Based Approach for Ship-Bridge Collision Alert System. Ocean Eng. 2019, 187, 106152. [Google Scholar] [CrossRef]
- Wan, Y.; Liu, C.; Qiao, W. An Safety Assessment Model of Ship Collision Based on Bayesian Network. In Proceedings of the 2019 European Navigation Conference (ENC), Warsaw, Poland, 9–12 April 2019; pp. 1–4. [Google Scholar]
- Wang, Z.; Wang, W.; Mu, K.; Fan, S. Time-Delay Following Model for Connected and Automated Vehicles Considering Multiple Vehicle Safety Potential Fields. Appl. Sci. 2024, 14, 6735. [Google Scholar] [CrossRef]
- Goerlandt, F.; Montewka, J. Maritime Transportation Risk Analysis: Review and Analysis in Light of Some Foundational Issues. Reliab. Eng. Syst. Saf. 2015, 138, 115–134. [Google Scholar] [CrossRef]
- Hetherington, C.; Flin, R.; Mearns, K. Safety in Shipping: The Human Element. J. Safety Res. 2006, 37, 401–411. [Google Scholar] [CrossRef]
- Li, L.; Gan, J.; Yi, Z.; Qu, X.; Ran, B. Risk Perception and the Warning Strategy Based on Safety Potential Field Theory. Accid. Anal. Prev. 2020, 148, 105805. [Google Scholar] [CrossRef]
- Fan, Y.; Qiao, S.; Wang, G.; Chen, S.; Zhang, H. A Modified Adaptive Kalman Filtering Method for Maneuvering Target Tracking of Unmanned Surface Vehicles. Ocean Eng. 2022, 266, 112890. [Google Scholar] [CrossRef]
- Faragher, R. Understanding the Basis of the Kalman Filter Via a Simple and Intuitive Derivation [Lecture Notes]. IEEE Signal Process. Mag. 2012, 29, 128–132. [Google Scholar] [CrossRef]
- Welch, G.F. Kalman Filter. In Computer Vision: A Reference Guide; Ikeuchi, K., Ed.; Springer International Publishing: Cham, Switzerland, 2021; pp. 721–723. ISBN 978-3-030-63416-2. [Google Scholar]
- Ristic, B.; La Scala, B.; Morelande, M.; Gordon, N. Statistical Analysis of Motion Patterns in AIS Data: Anomaly Detection and Motion Prediction. In Proceedings of the 2008 11th International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008; pp. 1–7. [Google Scholar]
- Zhang, W.; Feng, X.; Goerlandt, F.; Liu, Q. Towards a Convolutional Neural Network Model for Classifying Regional Ship Collision Risk Levels for Waterway Risk Analysis. Reliab. Eng. Syst. Saf. 2020, 204, 107127. [Google Scholar] [CrossRef]
- Shu, Y.; Daamen, W.; Ligteringen, H.; Wang, M.; Hoogendoorn, S. Calibration and Validation for the Vessel Maneuvering Prediction (VMP) Model Using AIS Data of Vessel Encounters. Ocean Eng. 2018, 169, 529–538. [Google Scholar] [CrossRef]
- Xue, J.; Papadimitriou, E.; Reniers, G.; Wu, C.; Jiang, D.; van Gelder, P.H.A.J.M. A Comprehensive Statistical Investigation Framework for Characteristics and Causes Analysis of Ship Accidents: A Case Study in the Fluctuating Backwater Area of Three Gorges Reservoir Region. Ocean Eng. 2021, 229, 108981. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, D.; Fu, S.; Kujala, P.; Hirdaris, S. A Predictive Analytics Method for Maritime Traffic Flow Complexity Estimation in Inland Waterways. Reliab. Eng. Syst. Saf. 2022, 220, 108317. [Google Scholar] [CrossRef]
- Gan, L.; Yan, Z.; Zhang, L.; Liu, K.; Zheng, Y.; Zhou, C.; Shu, Y. Ship Path Planning Based on Safety Potential Field in Inland Rivers. Ocean Eng. 2022, 260, 111928. [Google Scholar] [CrossRef]
- Bačkalov, I. Safety of Autonomous Inland Vessels: An Analysis of Regulatory Barriers in the Present Technical Standards in Europe. Saf. Sci. 2020, 128, 104763. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bridge Area Risk Element | Elemental Characteristics | Corresponding Safety Potential Field |
|---|---|---|
| Navigation officers (persons) | Physical quality | Behavioural field |
| Mental quality | ||
| Ship navigation skills | ||
| Ship | Ship speed | Kinetic energy field |
| Ship navigation direction | ||
| Environment | Channel boundary | Boundary energy field Boundary energy field Potential energy field Kinetic energy field Kinetic energy field |
| Channel width, depth, etc. | ||
| Bridge piers, stationary ships, quay | ||
| Traffic flow conditions | ||
| Channel floating debris | ||
| Management | Damaged or unclear navigational aids | Boundary energy field Behavioural field … |
| Emergency plan, team coordination | ||
| … |
| Pre-Longitude | Pre-Latitude | AIS-Longitude | AIS-Latitude | Error Longitude | Error Latitude | |
|---|---|---|---|---|---|---|
| Straight-line navigation | 106.503861 | 29.437757 | 106.503847 | 29.4378 | 0.000014 | 0.000043 |
| Altering course | 106.500388 | 29.441710 | 106.50023 | 29.441663 | 0.000155 | 0.000047 |
| Parameter | Value |
|---|---|
| 2.5 | |
| 0.18 | |
| 2.2 | |
| 20 | |
| 0.1 |
| Ship Number | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Length of ship | 110 | 110 | 85 | 85 | 110 |
| Width of ship | 16 | 16 | 11 | 11 | 16 |
| Speed | 8 | 8 | 8 | 8 | 12 |
| Course | 330 | 150 | 130 | 320 | 320 |
| Distance to piers/m | 1100 | 950 | 450 | 150 | 1000 |
| Distance to ipsilateral navigational markers/m | 115 | 35 | 35 | 35 | 115 |
| Parameters | Values |
|---|---|
| Ship Name | Shengyuan 506 |
| Length | 100 m |
| Width | 24 m |
| Draft | 11 m |
| Speed | 10 kn |
| Time Point | Projected Value | Warning Level | AIS Value | Warning Level | Error | Range of Warning Levels |
|---|---|---|---|---|---|---|
| T1 | - | Level 1 | 0.30 | Level 1 | - | Level 1 (0–0.50) |
| T2 | 0.79 | Level 2 | 0.74 | Level 2 | 0.05 | Level 2 (0.51–0.80) |
| T3 | 0.25 | Level 1 | 0.21 | Level 1 | 0.04 | Level 3 (0.81–1) |
| T4 | 0.20 | Level 1 | 0.18 | Level 1 | 0.02 |
| Parameters | Values |
|---|---|
| Ship Name | Shuiyu Huanjing 16 |
| Length | 48 m |
| Width | 14 m |
| Draft | 7 m |
| Speed | 8 kn |
| Time Point | Projected Value | Warning Level | AIS Value | Warning Level | Error | Range of Warning Levels |
|---|---|---|---|---|---|---|
| T1 | - | Level 1 | 0.30 | Level 1 | - | Level 1 (0–0.5) |
| T2 | 0.79 | Level 2 | 0.69 | Level 2 | 0.1 | Level 2 (0.51–0.80) |
| T3 | 0.25 | Level 1 | 0.21 | Level 1 | 0.04 | Level 3 (0.81–1) |
| T4 | 0.20 | Level 1 | 0.18 | Level 1 | 0.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, C.; He, X.; Huang, L.; Li, H.; Wen, T. Research on Collision Warning Method for Ship-Bridge Based on Safety Potential Field. Appl. Sci. 2024, 14, 9089. https://doi.org/10.3390/app14199089
Fan C, He X, Huang L, Li H, Wen T. Research on Collision Warning Method for Ship-Bridge Based on Safety Potential Field. Applied Sciences. 2024; 14(19):9089. https://doi.org/10.3390/app14199089
Chicago/Turabian StyleFan, Cheng, Xiongjun He, Liwen Huang, Haoyu Li, and Teng Wen. 2024. "Research on Collision Warning Method for Ship-Bridge Based on Safety Potential Field" Applied Sciences 14, no. 19: 9089. https://doi.org/10.3390/app14199089
APA StyleFan, C., He, X., Huang, L., Li, H., & Wen, T. (2024). Research on Collision Warning Method for Ship-Bridge Based on Safety Potential Field. Applied Sciences, 14(19), 9089. https://doi.org/10.3390/app14199089