
A Microscopic On-Ramp Model Based on Macroscopic Network Flows


Abstract
:1. Introduction
2. Methods
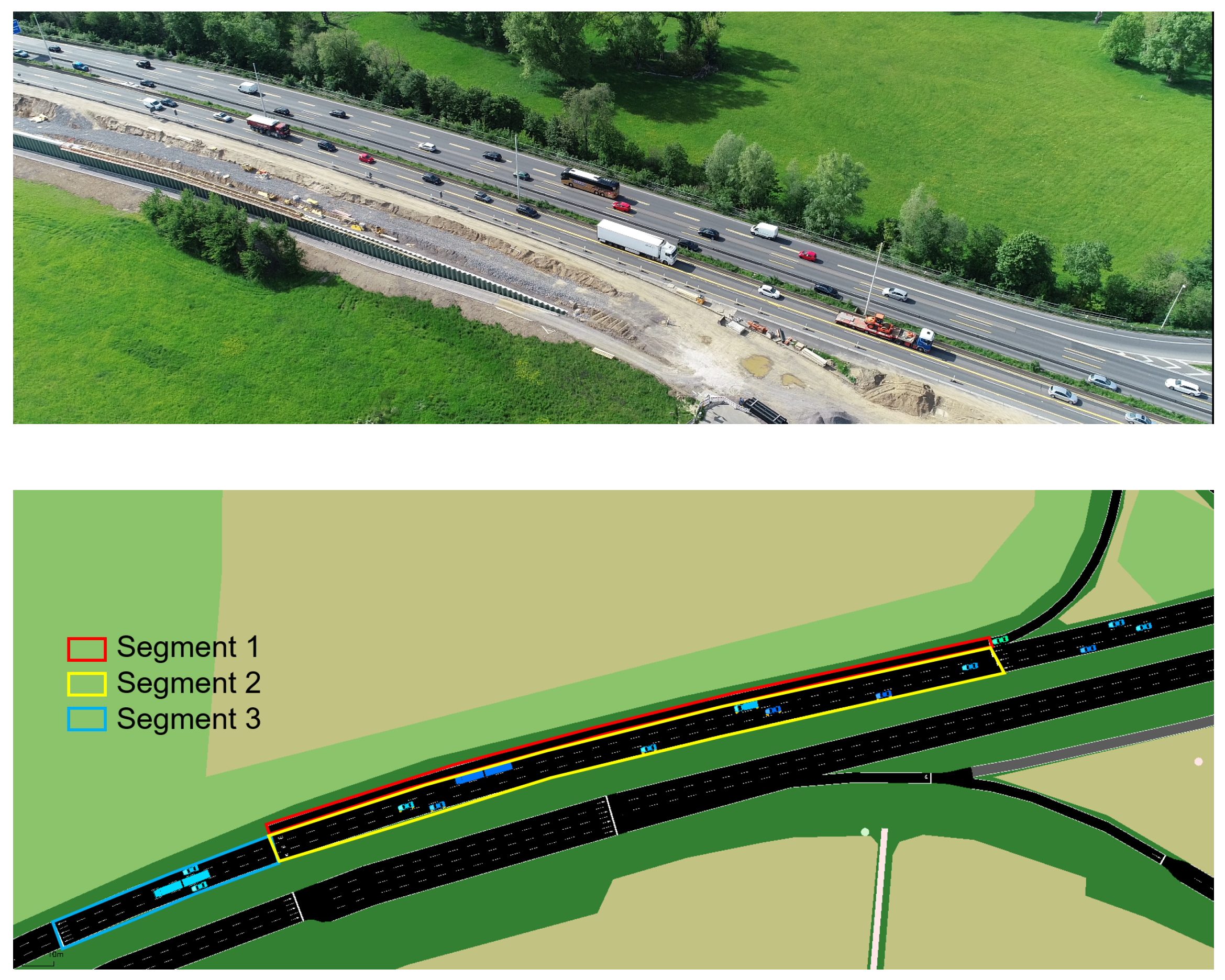
2.1. Trajectory Data
2.2. Data-Driven Macroscopic Junction Model
2.3. Transformation to Microscopic Model
2.4. Model Implementation
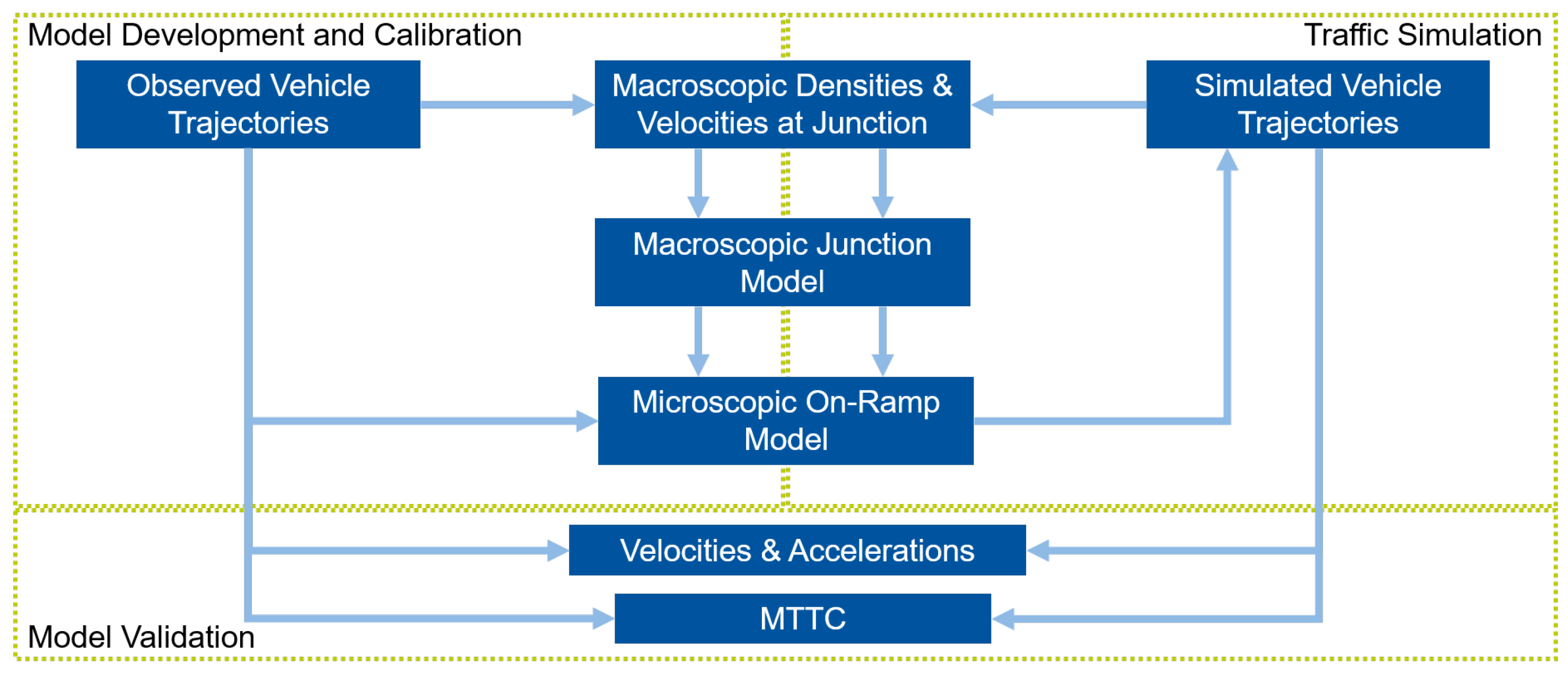
2.5. Model Evaluation
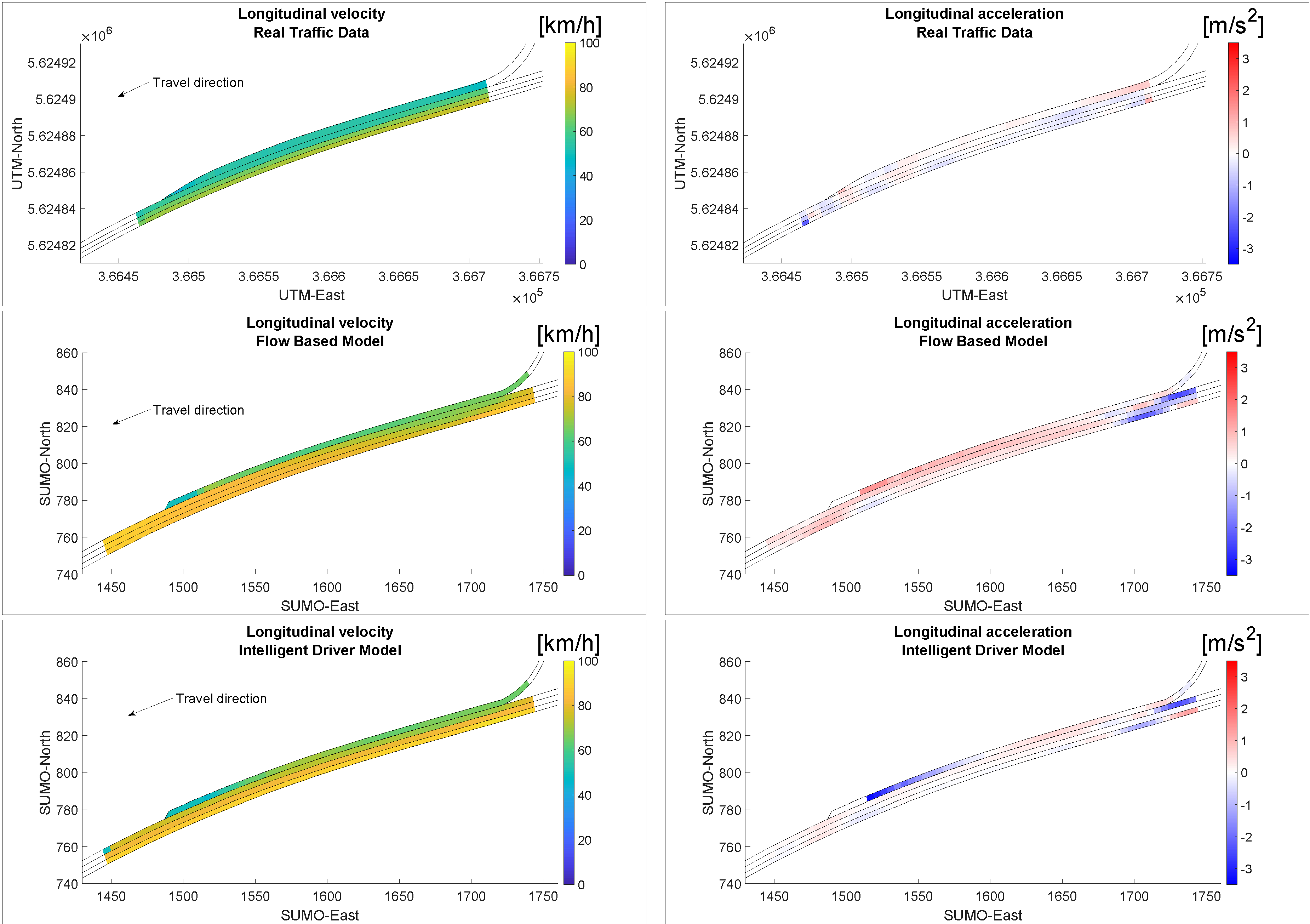
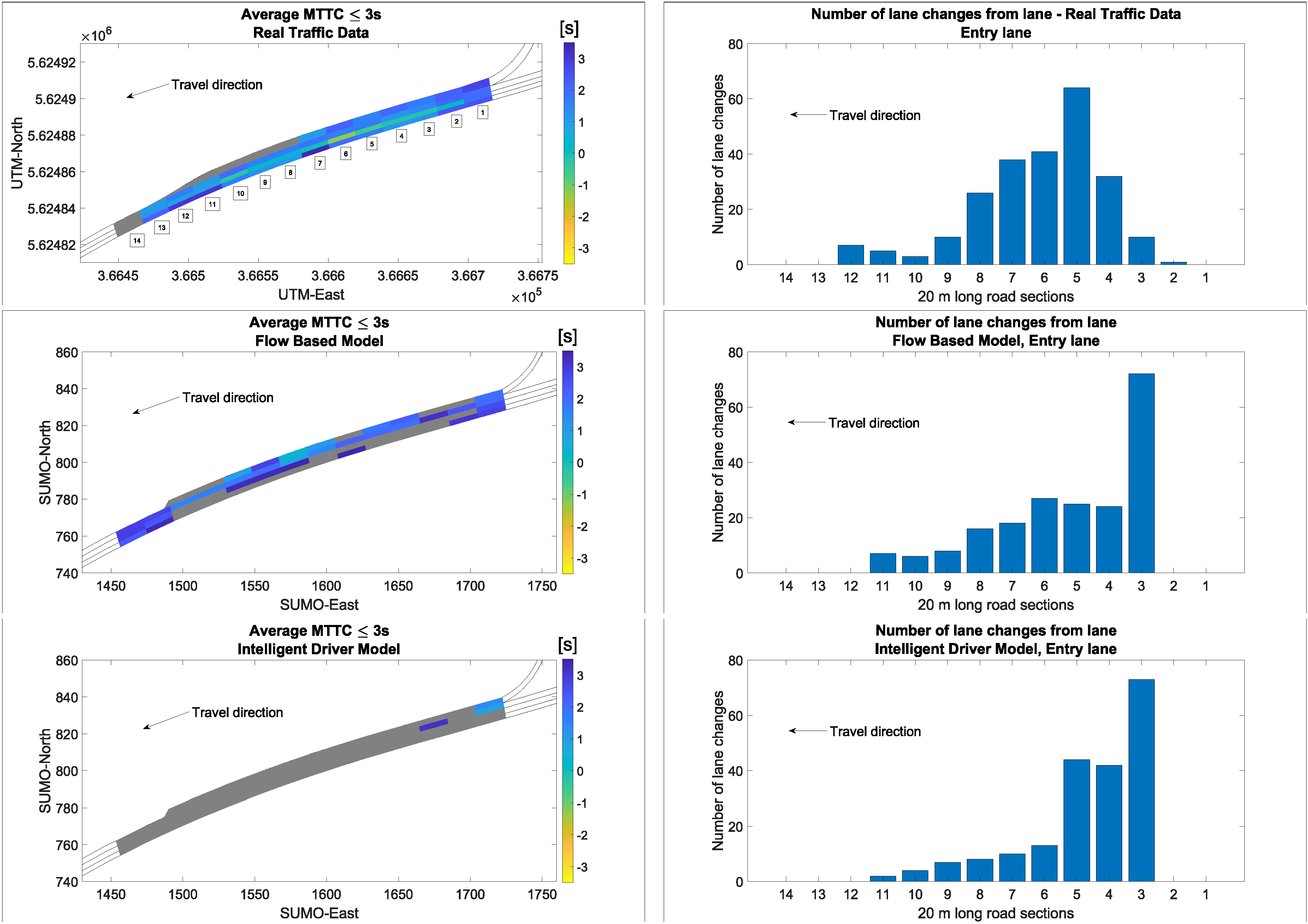
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Set | Time | Period | Passing Vehicles | Entering Vehicles | |||
|---|---|---|---|---|---|---|---|
| n | av. Speed | n | av. Speed | ||||
| 1 | day 1 | 5:10:30 | 5 min, 25 s | 281 | 74.9 km/h | 52 | 66.1 km/h |
| 2 | day 1 | 5:15:57 | 5 min, 26 s | 301 | 74.3 km/h | 71 | 63.5 km/h |
| 3 | day 1 | 5:21:24 | 5 min, 32 s | 298 | 71.0 km/h | 71 | 62.3 km/h |
| 4 | day 1 | 5:43:57 | 5 min, 26 s | 312 | 67.3 km/h | 73 | 56.3 km/h |
| 5 | day 1 | 5:49:25 | 5 min, 26 s | 288 | 65.0 km/h | 76 | 53.3 km/h |
| 6 | day 1 | 5:54:52 | 5 min, 27 s | 286 | 67.3 km/h | 68 | 56.2 km/h |
| 7 | day 1 | 6:00:22 | 1 min, 38 s | 28 | 68.2 km/h | 3 | 49.4 km/h |
| 8 | day 1 | 6:04:34 | 5 min, 26 s | 282 | 67.7 km/h | 89 | 56.3 km/h |
| 9 | day 1 | 6:38:58 | 5 min, 26 s | 269 | 67.4 km/h | 64 | 56.9 km/h |
| 10 | day 1 | 6:44:26 | 1 min, 25 s | 63 | 48.8 km/h | 11 | 32.2 km/h |
| 11 | day 2 | 15:10:37 | 2 min, 45 s | 85 | 74.4 km/h | 18 | 61.7 km/h |
| 12 | day 2 | 15:26:35 | 5 min, 27 s | 215 | 39.2 km/h | 33 | 33.3 km/h |
| 13 | day 2 | 15:44:39 | 5 min, 27 s | 233 | 66.3 km/h | 50 | 54.7 km/h |
| 14 | day 2 | 15:50:07 | 5 min, 27 s | 235 | 73.0 km/h | 54 | 61.0 km/h |
| 15 | day 2 | 15:55:34 | 2 min, 22 s | 107 | 73.3 km/h | 29 | 63.8 km/h |
| 16 | day 2 | 16:02:44 | 5 min, 27 s | 250 | 73.5 km/h | 69 | 62.6 km/h |
| 17 | day 2 | 16:08:13 | 5 min, 26 s | 244 | 74.2 km/h | 59 | 61.4 km/h |
| 18 | day 2 | 16:19:24 | 3 min, 6 s | 149 | 67.3 km/h | 37 | 61.4 km/h |
| 19 | day 3 | 6:07:22 | 5 min, 27 s | 300 | 65.2 km/h | 89 | 54.4 km/h |
| 20 | day 3 | 6:12:51 | 5 min, 26 s | 278 | 63.8 km/h | 83 | 52.2 km/h |
| 21 | day 3 | 7:26:13 | 2 min, 39 s | 66 | 67.4 km/h | 7 | 58.7 km/h |
| 22 | day 4 | 15:28:14 | 5 min, 26 s | 221 | 72.5 km/h | 27 | 60.5 km/h |
| 23 | day 4 | 15:33:42 | 5 min, 26 s | 247 | 72.3 km/h | 20 | 61.9 km/h |
| 24 | day 4 | 15:39:09 | 5 min, 26 s | 230 | 73.7 km/h | 15 | 62.5 km/h |
| 25 | day 4 | 15:44:36 | 2 min, 48 s | 76 | 67.8 km/h | 4 | 58.9 km/h |
| 26 | day 4 | 16:06:02 | 2 min, 59 s | 79 | 68.6 km/h | 9 | 63.2 km/h |
| 27 | day 4 | 16:11:53 | 5 min, 26 s | 231 | 77.3 km/h | 31 | 62.3 km/h |
| 28 | day 4 | 16:33:19 | 5 min, 27 s | 231 | 74.3 km/h | 29 | 62.2 km/h |
| 29 | day 4 | 16:38:47 | 5 min, 27 s | 244 | 68.2 km/h | 38 | 57.1 km/h |
| 30 | day 4 | 16:44:15 | 5 min, 27 s | 248 | 73.0 km/h | 34 | 62.0 km/h |
| 31 | day 4 | 16:49:45 | 4 min, 34 s | 171 | 68.6 km/h | 14 | 54.7 km/h |
References
- Blazek, D.; Blazekova, O.; Vojtekova, M. Analytical model of road bottleneck queueing system. Transp. Lett. 2022, 14, 888–897. [Google Scholar] [CrossRef]
- Mahmud, S.S.; Ferreira, L.; Hoque, M.S.; Tavassoli, A. Micro-simulation modelling for traffic safety: A review and potential application to heterogeneous traffic environment. IATSS Res. 2019, 43, 27–36. [Google Scholar] [CrossRef]
- Storani, F.; Di Pace, R.; de Luca, S. A hybrid traffic flow model for traffic management with human-driven and connected vehicles. Transp. B Transp. Dyn. 2022, 10, 1151–1183. [Google Scholar] [CrossRef]
- Aw, A.; Rascle, M. Resurrection of Second Order Models of Traffic Flow. SIAM J. Appl. Math. 2000, 60, 916–938. [Google Scholar] [CrossRef]
- Lighthill, M.J.; Whitham, G.B. On kinematic waves II. A theory of traffic flow on long crowded roads. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1955, 229, 317–345. [Google Scholar] [CrossRef]
- Richard, P.I. Shock Waves on the Highway. Oper. Res. 1956, 4, 42–51. [Google Scholar] [CrossRef]
- Zhang, H.M. A non-equilibrium traffic model devoid of gas-like behavior. Transp. Res. Part B Methodol. 2002, 36, 275–290. [Google Scholar] [CrossRef]
- Fan, S.; Herty, M.; Seibold, B. Comparative model accuracy of a data-fitted generalized Aw-Rascle-Zhang model. Netw. Heterog. Media 2014, 9, 239–268. [Google Scholar] [CrossRef]
- Schönhof, M.; Helbing, D. Empirical Features of Congested Traffic States and Their Implications for Traffic Modeling. Transp. Sci. 2007, 41, 135–166. [Google Scholar] [CrossRef]
- Würth, A.; Binois, M.; Goatin, P.; Göttlich, S. Data-driven uncertainty quantification in macroscopic traffic flow models. Adv. Comput. Math. 2022, 48, 916. [Google Scholar] [CrossRef]
- Garavello, M.; Piccoli, B. Traffic Flow on Networks: Conservation Law Models; American Institute of Mathematical Sciences: Pasadena, CA, USA, 2006. [Google Scholar]
- Göttlich, S.; Herty, M.; Moutari, S.; Weissen, J. Second-Order Traffic Flow Models on Networks. SIAM J. Appl. Math. 2021, 81, 258–281. [Google Scholar] [CrossRef]
- Simoni, M.D.; Claudel, C.G. A Fast Lax–Hopf Algorithm to Solve the Lighthill–Whitham–Richards Traffic Flow Model on Networks. Transp. Sci. 2020, 54, 1516–1534. [Google Scholar] [CrossRef]
- Herty, M.; Kolbe, N.; Müller, S. Central schemes for networked scalar conservation laws. Netw. Heterog. Media 2023, 18, 310–340. [Google Scholar] [CrossRef]
- Herty, M.; Kolbe, N. Data-driven models for traffic flow at junctions. Math. Methods Appl. Sci. 2024, 47, 8946–8968. [Google Scholar] [CrossRef]
- Bando, M.; Hasebe, K.; Nakayama, A.; Shibata, A.; Sugiyama, Y. Dynamical model of traffic congestion and numerical simulation. Phys. Rev. Stat. Phys. Plasmas Fluids Relat. Interdiscip. Top. 1995, 51, 1035–1042. [Google Scholar] [CrossRef]
- Jiang, R.; Wu, Q.; Zhu, Z. Full velocity difference model for a car-following theory. Phys. Rev. Stat. Nonlinear Soft Matter Phys. 2001, 64, 017101. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. Stat. Phys. Plasmas Fluids Relat. Interdiscip. Top. 2000, 62, 1805–1824. [Google Scholar] [CrossRef]
- Bham, G. A simple lane change model for microscopic traffic flow simulation in weaving sections. Transp. Lett. 2011, 3, 231–251. [Google Scholar] [CrossRef]
- Kong, D.; List, G.F.; Guo, X.; Wu, D. Modeling vehicle car-following behavior in congested traffic conditions based on different vehicle combinations. Transp. Lett. 2018, 10, 280–293. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Li, R.; Wu, S.; Li, L. Unraveling Spatial–Temporal Patterns and Heterogeneity of On-Ramp Vehicle Merging Behavior: Evidence from the exiD Dataset. Appl. Sci. 2024, 14, 2344. [Google Scholar] [CrossRef]
- Zhang, D.; Chen, X.; Wang, J.; Wang, Y.; Sun, J. A comprehensive comparison study of four classical car-following models based on the large-scale naturalistic driving experiment. Simul. Model. Pract. Theory 2021, 113, 102383. [Google Scholar] [CrossRef]
- Mohan, R.; Ramadurai, G. State-of-the art of macroscopic traffic flow modelling. Int. J. Adv. Eng. Sci. Appl. Math. 2013, 5, 158–176. [Google Scholar] [CrossRef]
- Papageorgiou, M. Some remarks on macroscopic traffic flow modelling. Transp. Res. Part A Policy Pract. 1998, 32, 323–329. [Google Scholar] [CrossRef]
- Saifuzzaman, M.; Zheng, Z. Incorporating human-factors in car-following models: A review of recent developments and research needs. Transp. Res. Part C Emerg. Technol. 2014, 48, 379–403. [Google Scholar] [CrossRef]
- Colombo, R.; Rossi, E. On the Micro-Macro limit in traffic flow. Rend. Semin. Mat. Univ. Padova 2014, 131, 217–235. [Google Scholar] [CrossRef]
- Herty, M.; Fazekas, A.; Visconti, G. A two-dimensional data-driven model for traffic flow on highways. Netw. Heterog. Media 2018, 13, 217–240. [Google Scholar] [CrossRef]
- Herty, M.; Moutari, S.; Visconti, G. Macroscopic Modeling of Multilane Motorways Using a Two-Dimensional Second-Order Model of Traffic Flow. SIAM J. Appl. Math. 2018, 78, 2252–2278. [Google Scholar] [CrossRef]
- Wang, K.; Qu, D.; Yang, Y.; Dai, S.; Wang, T. Risk-Quantification Method for Car-Following Behavior Considering Driving-Style Propensity. Appl. Sci. 2024, 14, 1746. [Google Scholar] [CrossRef]
- Calvert, S.C.; Schakel, W.J.; van Lint, J. A generic multi-scale framework for microscopic traffic simulation part II—Anticipation Reliance as compensation mechanism for potential task overload. Transp. Res. Part B Methodol. 2020, 140, 42–63. [Google Scholar] [CrossRef]
- Mahmud, S.S.; Ferreira, L.; Hoque, M.S.; Tavassoli, A. Application of proximal surrogate indicators for safety evaluation: A review of recent developments and research needs. IATSS Res. 2017, 41, 153–163. [Google Scholar] [CrossRef]
- Tang, S.; Lu, Y.; Liao, Y.; Cheng, K.; Zou, Y. A New Surrogate Safety Measure Considering Temporal–Spatial Proximity and Severity of Potential Collisions. Appl. Sci. 2024, 14, 2711. [Google Scholar] [CrossRef]
- Dong, T.; Zhou, J.; Zhuo, J.; Li, B.; Zhu, F. On the Local and String Stability Analysis of Traffic Collision Risk. Appl. Sci. 2024, 14, 942. [Google Scholar] [CrossRef]
- Lamberty, S.; Fazekas, A.; Kalló, E.; Oeser, M. DROVA Dataset. 2023. Available online: https://data.isac.rwth-aachen.de/ (accessed on 20 August 2024).
- Garavello, M.; Han, K.; Piccoli, B. Models for Vehicular Traffic on Networks; AIMS Series on Applied Mathematics; American Institute of Mathematical Sciences: Springfield, MO, USA, 2016; Volume 9. [Google Scholar]
- Lebacque, J.P. The Godunov scheme and what it means for first order traffic flow models. In Proceedings of the 13th International Symposium on Transportation and Traffic Theory, Lyon, France, 24–26 July 1996; pp. 647–677. [Google Scholar]
- Keane, R.; Gao, H.O. Fast Calibration of Car-Following Models to Trajectory Data Using the Adjoint Method. Transp. Sci. 2021, 55, 592–615. [Google Scholar] [CrossRef]
- Treiber, M.; Kanagaraj, V. Comparing numerical integration schemes for time-continuous car-following models. Phys. A Stat. Mech. Its Appl. 2015, 419, 183–195. [Google Scholar] [CrossRef]
- Lopez, P.A.; Wiessner, E.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flotterod, Y.P.; Hilbrich, R.; Lucken, L.; Rummel, J.; Wagner, P. Microscopic Traffic Simulation using SUMO. In Proceedings of the IEEE 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2575–2582. [Google Scholar] [CrossRef]
- Erdmann, J. SUMO’s Lane-changing model. Lect. Notes Control. Inf. Sci. 2014, 13, 105–123. [Google Scholar]
- Berghaus, M.; Kallo, E.; Oeser, M. Car-Following Model Calibration Based on Driving Simulator Data to Study Driver Characteristics and to Investigate Model Validity in Extreme Traffic Situations. Transp. Res. Rec. 2021, 2675, 1214–1232. [Google Scholar] [CrossRef]
- Hayward, J.C. Near-miss determination through use of a scale of danger. Highw. Res. Rec. 1972, 384, 24–34. [Google Scholar]
- Ozbay, K.; Yang, H.; Bartin, B.; Mudigonda, S. Derivation and Validation of New Simulation-Based Surrogate Safety Measure. Transp. Res. Rec. J. Transp. Res. Board 2008, 2083, 105–113. [Google Scholar] [CrossRef]
- Nadimi, N.; Ragland, D.R.; Mohammadian Amiri, A. An evaluation of time-to-collision as a surrogate safety measure and a proposal of a new method for its application in safety analysis. Transp. Lett. 2020, 12, 491–500. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kolbe, N.; Berghaus, M.; Kalló, E.; Herty, M.; Oeser, M. A Microscopic On-Ramp Model Based on Macroscopic Network Flows. Appl. Sci. 2024, 14, 9111. https://doi.org/10.3390/app14199111
Kolbe N, Berghaus M, Kalló E, Herty M, Oeser M. A Microscopic On-Ramp Model Based on Macroscopic Network Flows. Applied Sciences. 2024; 14(19):9111. https://doi.org/10.3390/app14199111
Chicago/Turabian StyleKolbe, Niklas, Moritz Berghaus, Eszter Kalló, Michael Herty, and Markus Oeser. 2024. "A Microscopic On-Ramp Model Based on Macroscopic Network Flows" Applied Sciences 14, no. 19: 9111. https://doi.org/10.3390/app14199111