
Simultaneous Identification of Multiple Parameters in Wireless Power Transfer Systems Using Primary Variable Capacitors





Abstract
Featured Application
Abstract
1. Introduction
2. System Design and Analysis
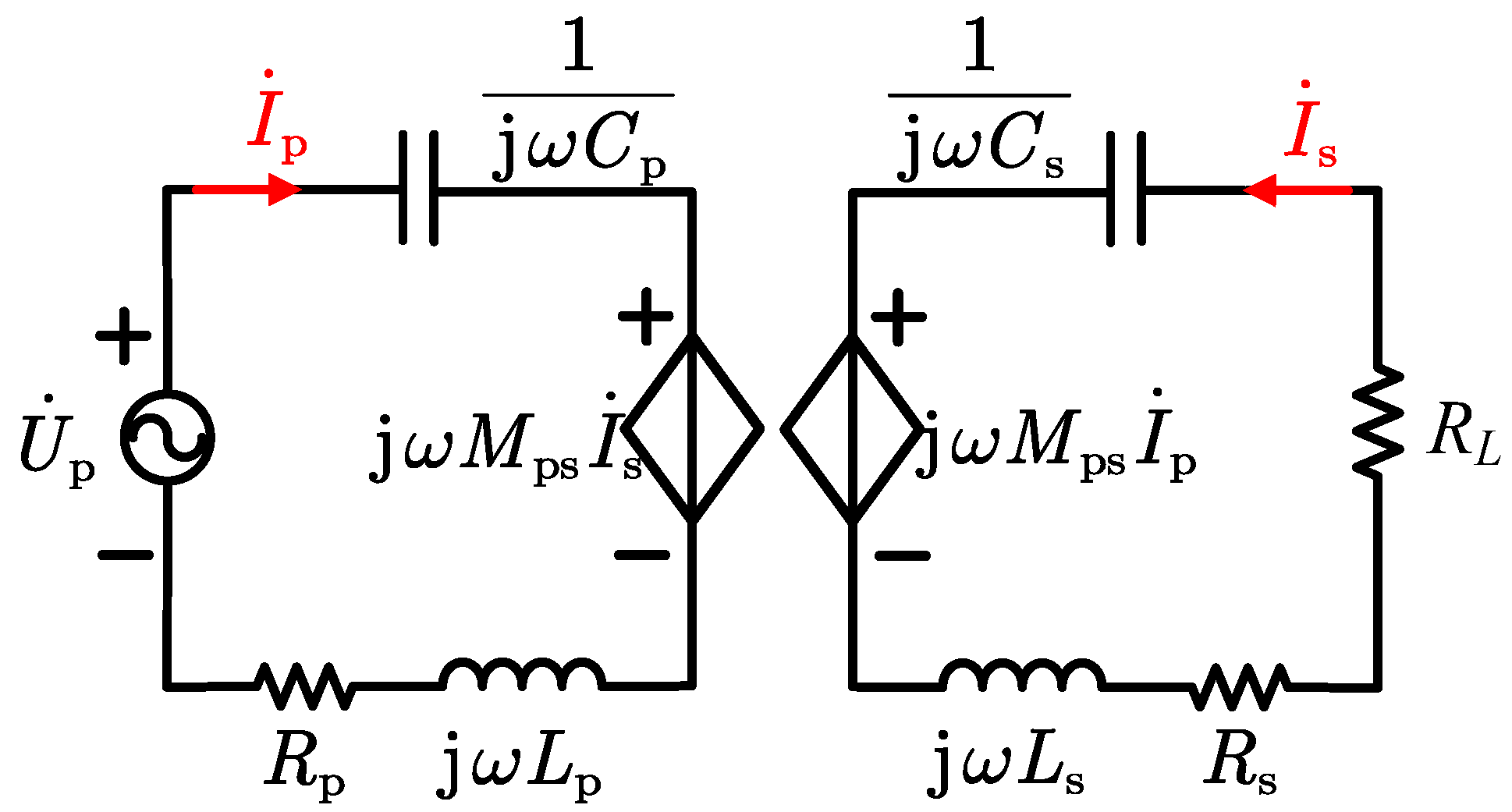
2.1. Circuit Model Analysis
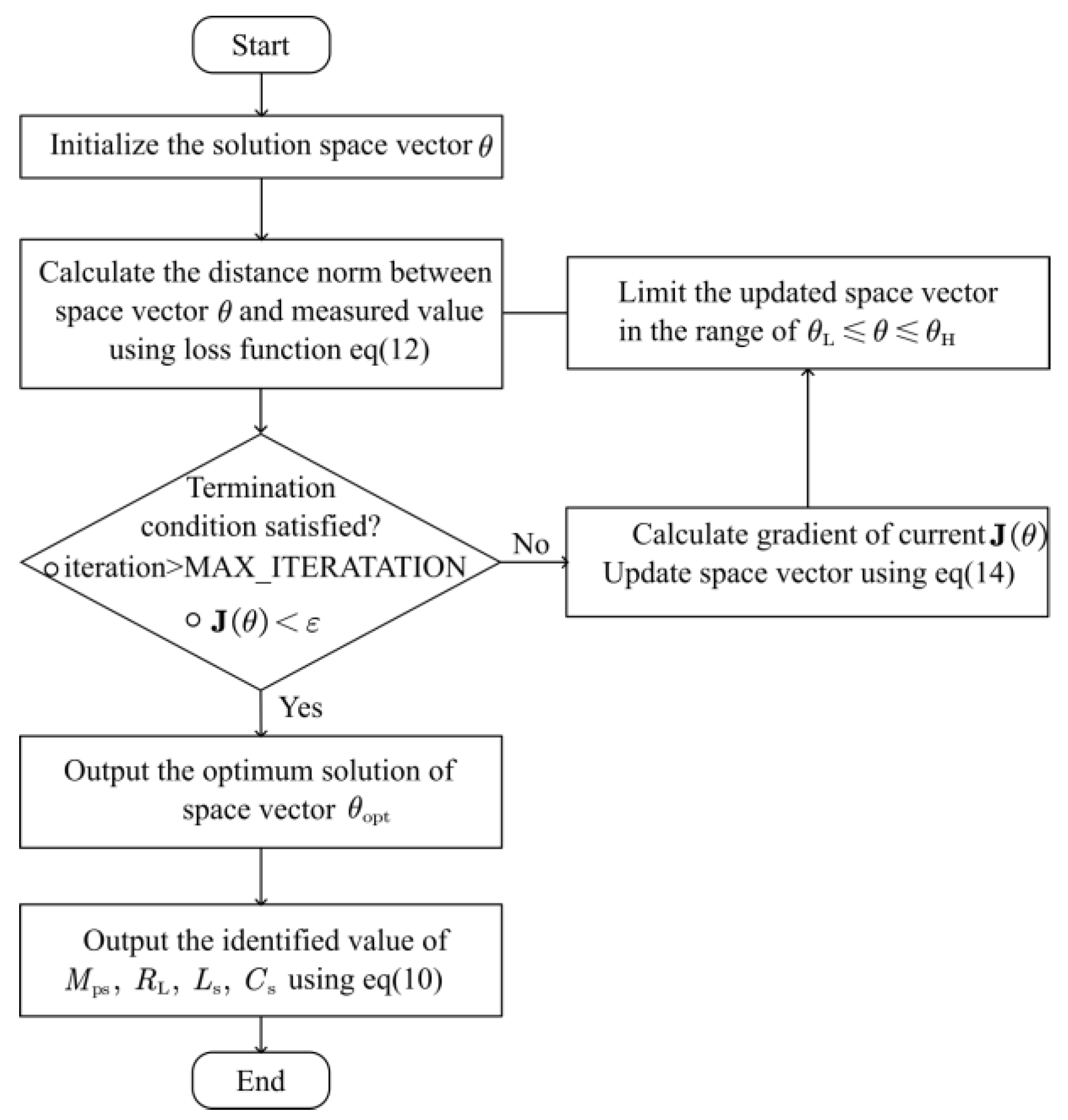
2.2. Gradient Descent for Parameter Identification
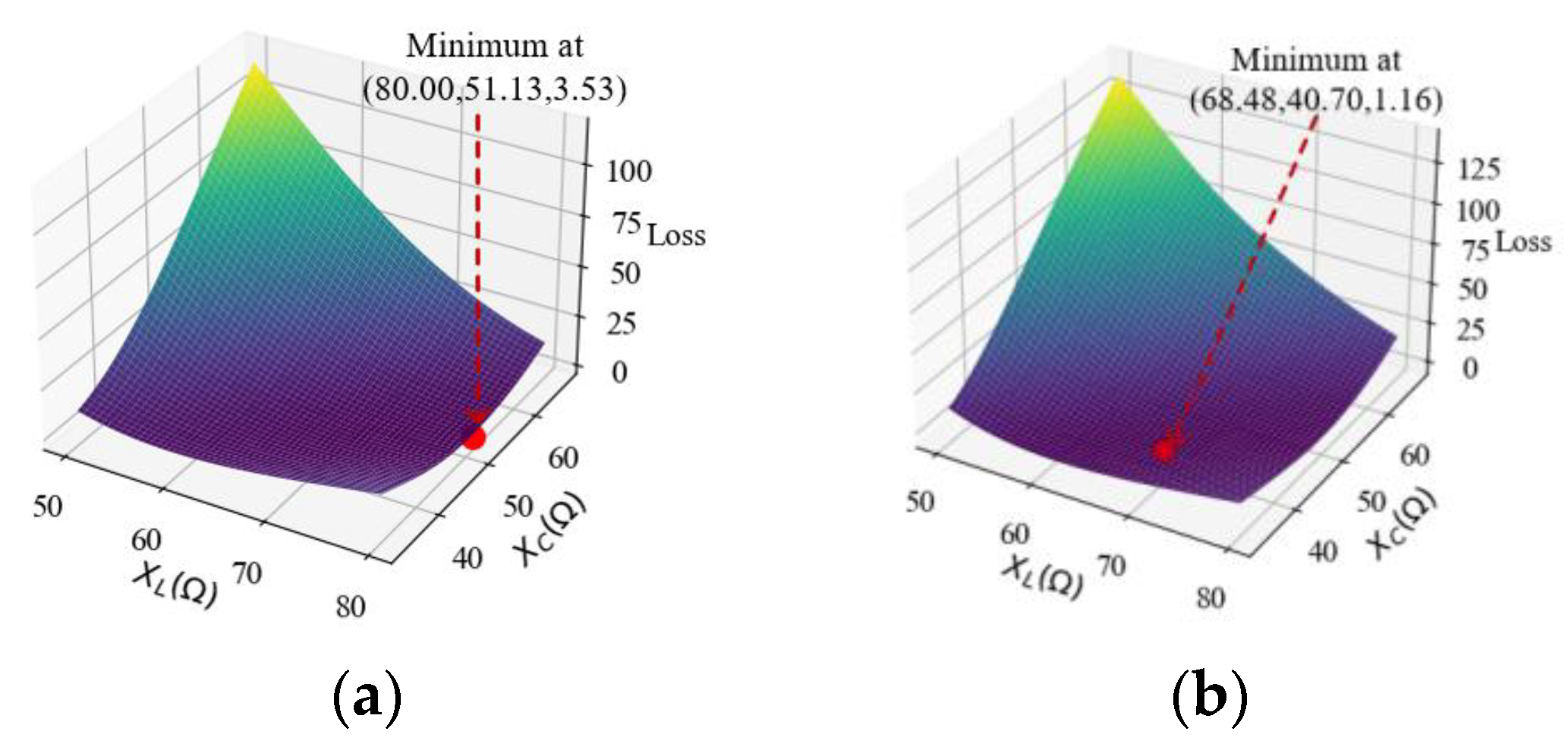
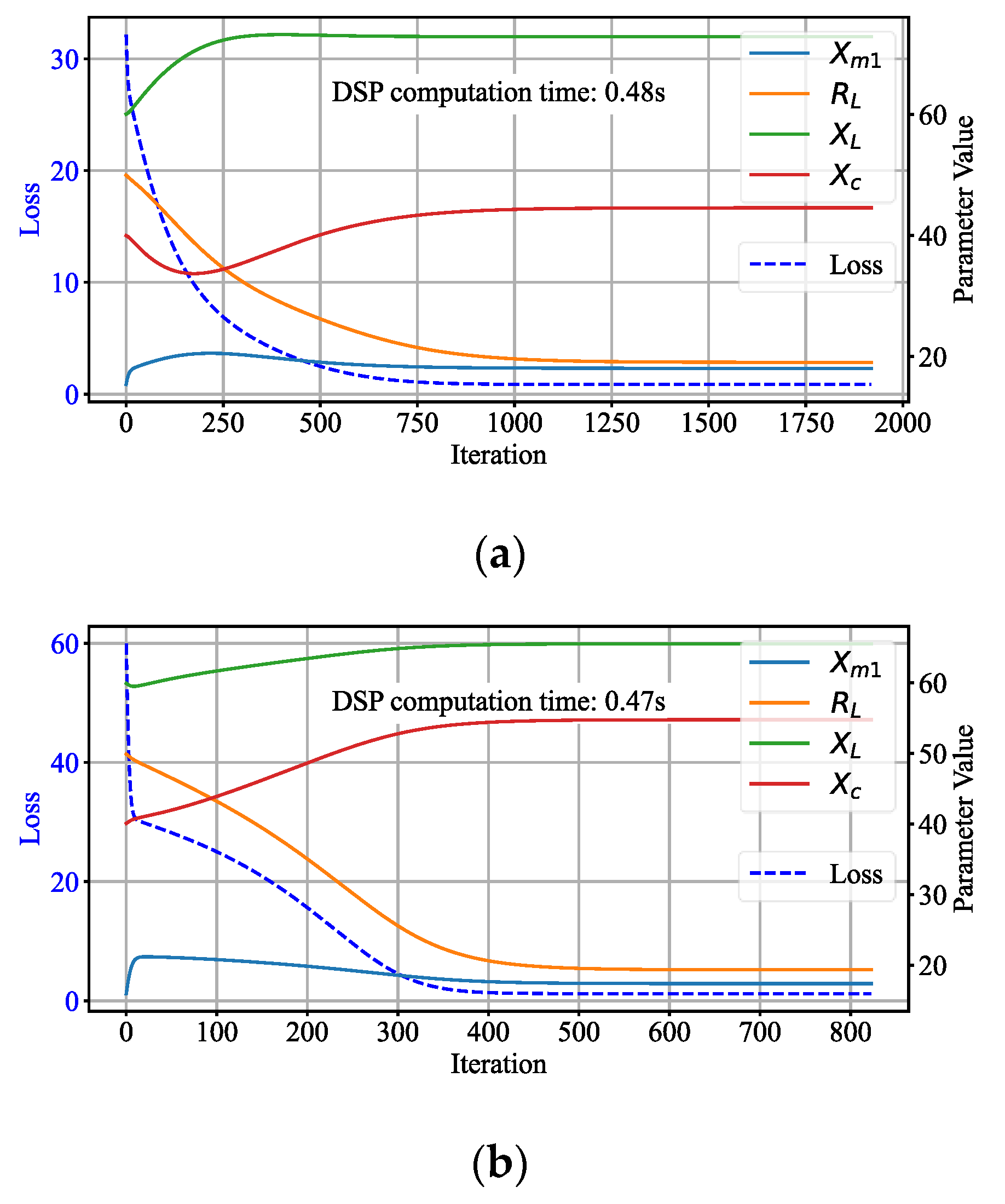
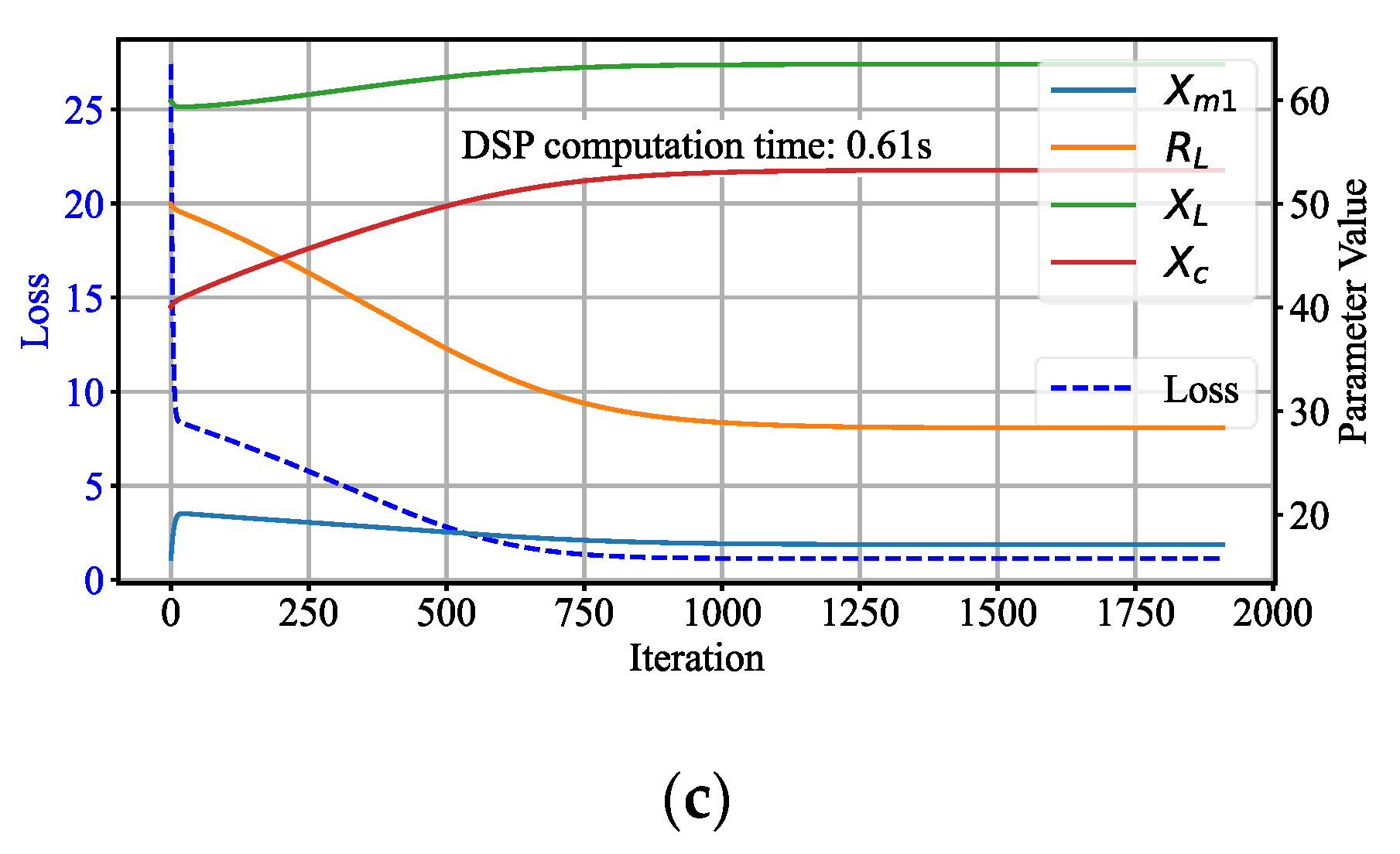
2.3. Verification via Simulation
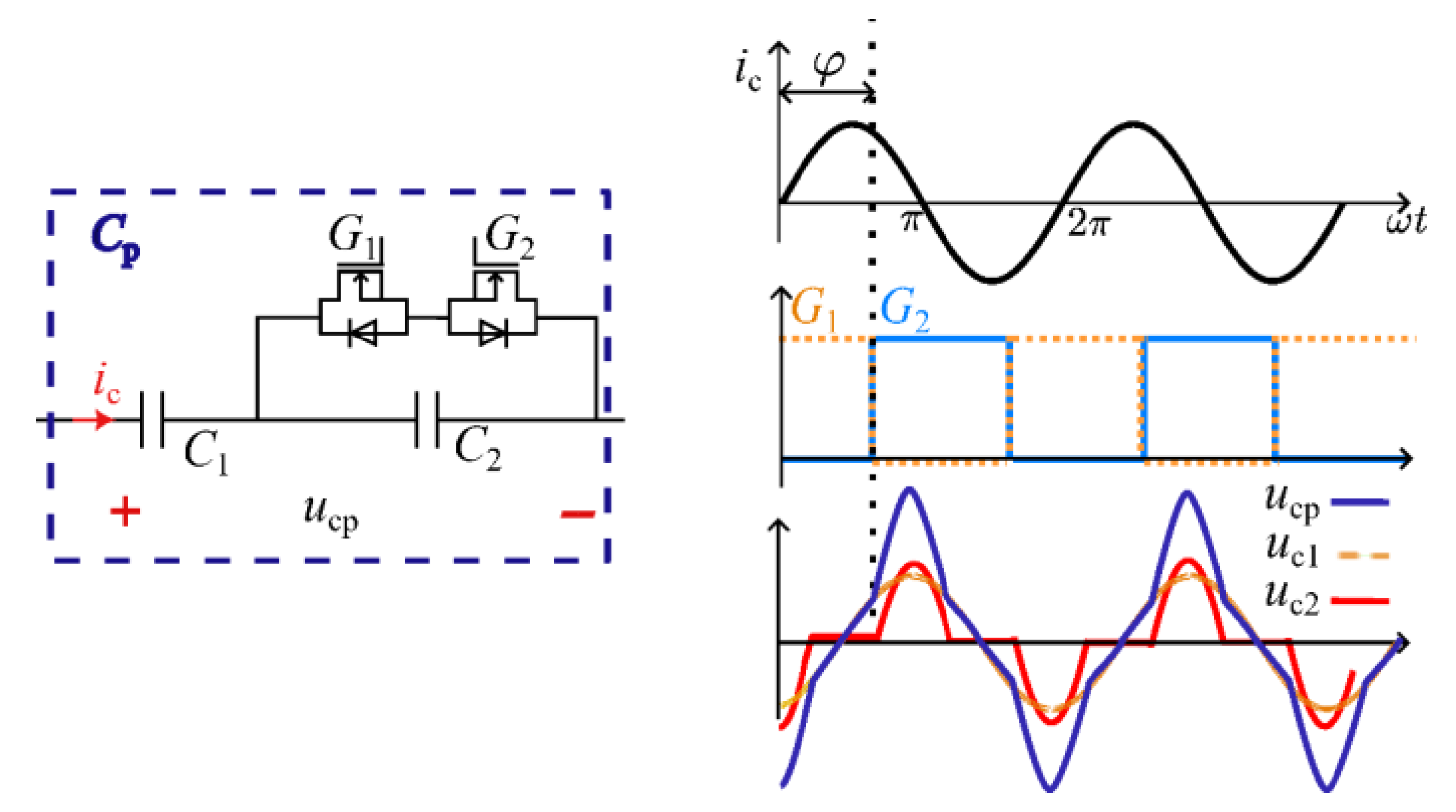
- When the relay Sr is open, and both MOSFETs paralleled with C2 are conducting, the equivalent capacitance overall is C1.
- When the relay Sr is closed, and both MOSFETs paralleled with C2 are turned off, the equivalent capacitance overall is C2.
- When the relay Sr is open, C2 and the two MOSFETs paralleled to form an SCC, which can achieve continuously adjustable capacitance from C1 in series with C2 to C1.
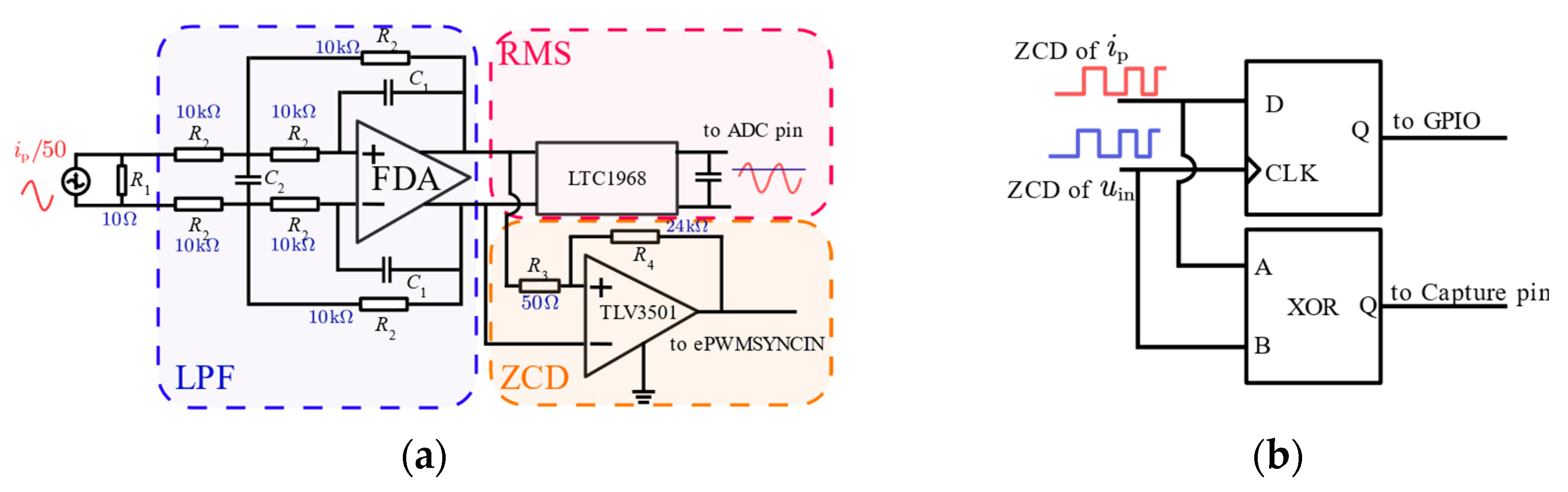
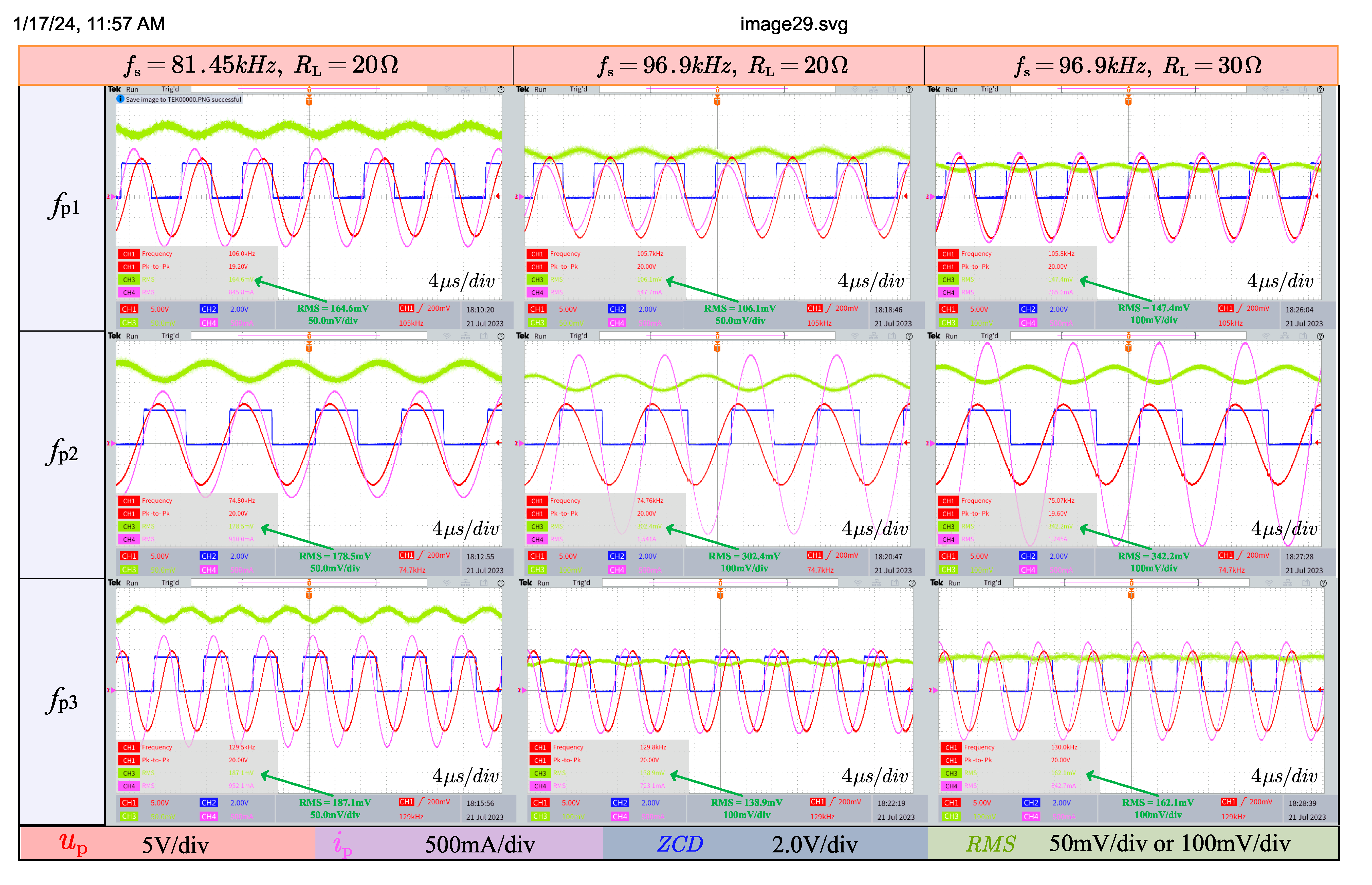
3. Experimental Implementation
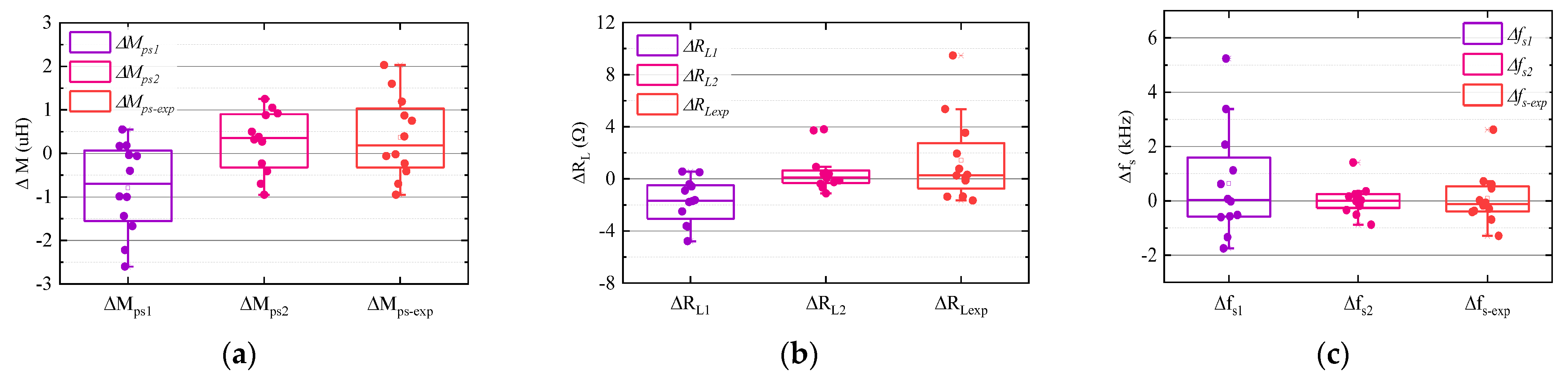
3.1. Parameter Identification
- Choose the output frequency of the function generator.
- Select the correct mode of Cp.
- Log the data of Ipi, φi.
- Perform the GD Algorithm.
3.2. Accommodation of Unknown Receivers
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Z.; Pang, H.; Georgiadis, A.; Cecati, C. Wireless Power Transfer—An Overview. IEEE Trans. Ind. Electron. 2019, 66, 1044–1058. [Google Scholar] [CrossRef]
- Han, W.; Chau, K.T.; Liu, W.; Tian, X.; Wang, H. A Dual-Resonant Topology-Reconfigurable Inverter for All-Metal Induction Heating. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 3818–3829. [Google Scholar] [CrossRef]
- Han, W.; Chau, K.T.; Jiang, C.; Liu, W.; Lam, W.H. Design and Analysis of Wireless Direct-Drive High-Intensity Discharge Lamp. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 3558–3568. [Google Scholar] [CrossRef]
- Haerinia, M.; Shadid, R. Wireless Power Transfer Approaches for Medical Implants: A Review. Signals 2020, 1, 209–229. [Google Scholar] [CrossRef]
- Qu, X.; Jing, Y.; Han, H.; Wong, S.-C.; Tse, C.K. Higher Order Compensation for Inductive-Power-Transfer Converters with Constant-Voltage or Constant-Current Output Combating Transformer Parameter Constraints. IEEE Trans. Power Electron. 2017, 32, 394–405. [Google Scholar] [CrossRef]
- Zhong, W.X.; Hui, S.Y.R. Maximum Energy Efficiency Tracking for Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2015, 30, 4025–4034. [Google Scholar] [CrossRef]
- Dai, X.; Li, X.; Li, Y.; Hu, A.P. Maximum Efficiency Tracking for Wireless Power Transfer Systems with Dynamic Coupling Coefficient Estimation. IEEE Trans. Power Electron. 2018, 33, 5005–5015. [Google Scholar] [CrossRef]
- Zhong, W.; Hui, S.Y. Reconfigurable Wireless Power Transfer Systems with High Energy Efficiency over Wide Load Range. IEEE Trans. Power Electron. 2018, 33, 6379–6390. [Google Scholar] [CrossRef]
- Lim, Y.; Tang, H.; Lim, S.; Park, J. An Adaptive Impedance-Matching Network Based on a Novel Capacitor Matrix for Wireless Power Transfer. IEEE Trans. Power Electron. 2014, 29, 4403–4413. [Google Scholar] [CrossRef]
- Qi Wireless Charging. Available online: https://www.wirelesspowerconsortium.com/standards/qi-wireless-charging/ (accessed on 15 January 2024).
- J2954_202010; Wireless Power Transfer for Light-Duty Plug-in/Electric Vehicles and Alignment Methodology. SAE International: Warrendale, PA, USA, 2020. Available online: https://www.sae.org/standards/content/j2954_202010/ (accessed on 15 January 2024).
- Wang, Z.-H.; Li, Y.-P.; Sun, Y.; Tang, C.-S.; Lv, X. Load Detection Model of Voltage-Fed Inductive Power Transfer System. IEEE Trans. Power Electron. 2013, 28, 5233–5243. [Google Scholar] [CrossRef]
- Lin, D.; Yin, J.; Hui, S.Y.R. Parameter Identification of Wireless Power Transfer Systems Using Input Voltage and Current. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014. [Google Scholar]
- Yin, J.; Lin, D.; Lee, C.K.; Parisini, T.; Hui, S.Y. Front-End Monitoring of Multiple Loads in Wireless Power Transfer Systems without Wireless Communication Systems. IEEE Trans. Power Electron. 2016, 31, 2510–2517. [Google Scholar] [CrossRef]
- Yang, Y.; Tan, S.-C.; Hui, S.Y.R. Front-End Parameter Monitoring Method Based on Two-Layer Adaptive Differential Evolution for SS-Compensated Wireless Power Transfer Systems. IEEE Trans. Industr. Inform. 2019, 15, 6101–6113. [Google Scholar] [CrossRef]
- Gong, W.; Xiao, J.; Wu, X.; Chen, S.; Wu, N. Research on Parameter Identification and Phase-Shifted Control of Magnetically Coupled Wireless Power Transfer System Based on Inductor–Capacitor–Capacitor Compensation Topology. Energy Rep. 2022, 8, 949–957. [Google Scholar] [CrossRef]
- Liu, J.; Wang, G.; Xu, G.; Peng, J.; Jiang, H. A Parameter Identification Approach with Primary-Side Measurement for DC–DC Wireless-Power-Transfer Converters with Different Resonant Tank Topologies. IEEE Trans. Transp. Electrif. 2021, 7, 1219–1235. [Google Scholar] [CrossRef]
- Su, Y.-G.; Zhang, H.-Y.; Wang, Z.-H.; Patrick Hu, A.; Chen, L.; Sun, Y. Steady-State Load Identification Method of Inductive Power Transfer System Based on Switching Capacitors. IEEE Trans. Power Electron. 2015, 30, 6349–6355. [Google Scholar] [CrossRef]
- Yang, Y.; Tan, S.C.; Hui, S.Y.R. Fast Hardware Approach to Determining Mutual Coupling of Series–Series-Compensated Wireless Power Transfer Systems with Active Rectifiers. IEEE Trans. Power Electron. 2020, 35, 11026–11038. [Google Scholar] [CrossRef]
- Zeng, J.; Chen, S.; Yang, Y.; Hui, S.Y.R. A Primary-Side Method for Ultrafast Determination of Mutual Coupling Coefficient in Milliseconds for Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2022, 37, 15706–15716. [Google Scholar] [CrossRef]
- He, L.; Zhao, S.; Wang, X.; Lee, C.-K. Artificial Neural Network-Based Parameter Identification Method for Wireless Power Transfer Systems. Electronics 2022, 11, 1415. [Google Scholar] [CrossRef]
- Zhang, H.; Tan, P.-A.; Shangguan, X.; Zhang, X.; Liu, H. Machine Learning-Based Parameter Identification Method for Wireless Power Transfer Systems. J. Power Electron. 2022, 22, 1606–1616. [Google Scholar] [CrossRef]
- Harada, K.; Gu, W.J.; Murata, K. Controlled Resonant Converters with Switching Frequency Fixed. In Proceedings of the 1987 IEEE Power Electronics Specialists Conference, Blacksburg, VA, USA, 21–26 June 1987; IEEE: Piscataway, NJ, USA, 1987. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Symbol | Value |
|---|---|---|
| Input voltage RMS | Up | 7.07 V |
| Primary-side capacitor 1 | C1 | 44 nF |
| Primary-side capacitor 2 | C2 | 22 nF |
| Secondary-side capacitor | Cs | 26.7, 33.2, 37.8 nF |
| ESR of transmitter | Rp | 0.4 Ω |
| Self-inductance of transmitter | Lp | 103 μH |
| ESR of receiver | Rs | 0.4 Ω |
| Self-inductance of receiver | Ls | 101 μH |
| Mutual inductance | Mps | 26.7 μH |
| Load resistance | RL | 5, 10, 20, and 30 Ω |
| Primary-side resonant frequency 1,2,3 | fp1,2,3 | 105.73, 74.76, and 129.49 kHz |
| Secondary-side resonant frequency | fs | 81.45, 86.9, and 96.9 kHz |
| Lower bound of space vector | θL | [5, 2, 50, and 33.3] Ohm |
| Upper bound of space vector | θH | [30, 50, 80, and 66.6] Ohm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Han, W.; Hu, Y.; Zhang, B. Simultaneous Identification of Multiple Parameters in Wireless Power Transfer Systems Using Primary Variable Capacitors. Appl. Sci. 2024, 14, 793. https://doi.org/10.3390/app14020793
Liu C, Han W, Hu Y, Zhang B. Simultaneous Identification of Multiple Parameters in Wireless Power Transfer Systems Using Primary Variable Capacitors. Applied Sciences. 2024; 14(2):793. https://doi.org/10.3390/app14020793
Chicago/Turabian StyleLiu, Chang, Wei Han, Youhao Hu, and Bowang Zhang. 2024. "Simultaneous Identification of Multiple Parameters in Wireless Power Transfer Systems Using Primary Variable Capacitors" Applied Sciences 14, no. 2: 793. https://doi.org/10.3390/app14020793
APA StyleLiu, C., Han, W., Hu, Y., & Zhang, B. (2024). Simultaneous Identification of Multiple Parameters in Wireless Power Transfer Systems Using Primary Variable Capacitors. Applied Sciences, 14(2), 793. https://doi.org/10.3390/app14020793