
A Novel Robust Control System Design and Its Application to Servo Motor Drive

Abstract
:1. Introduction
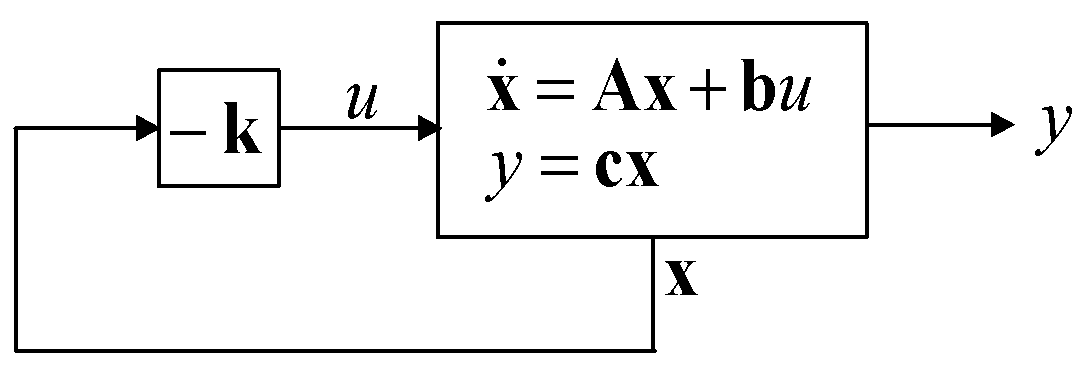
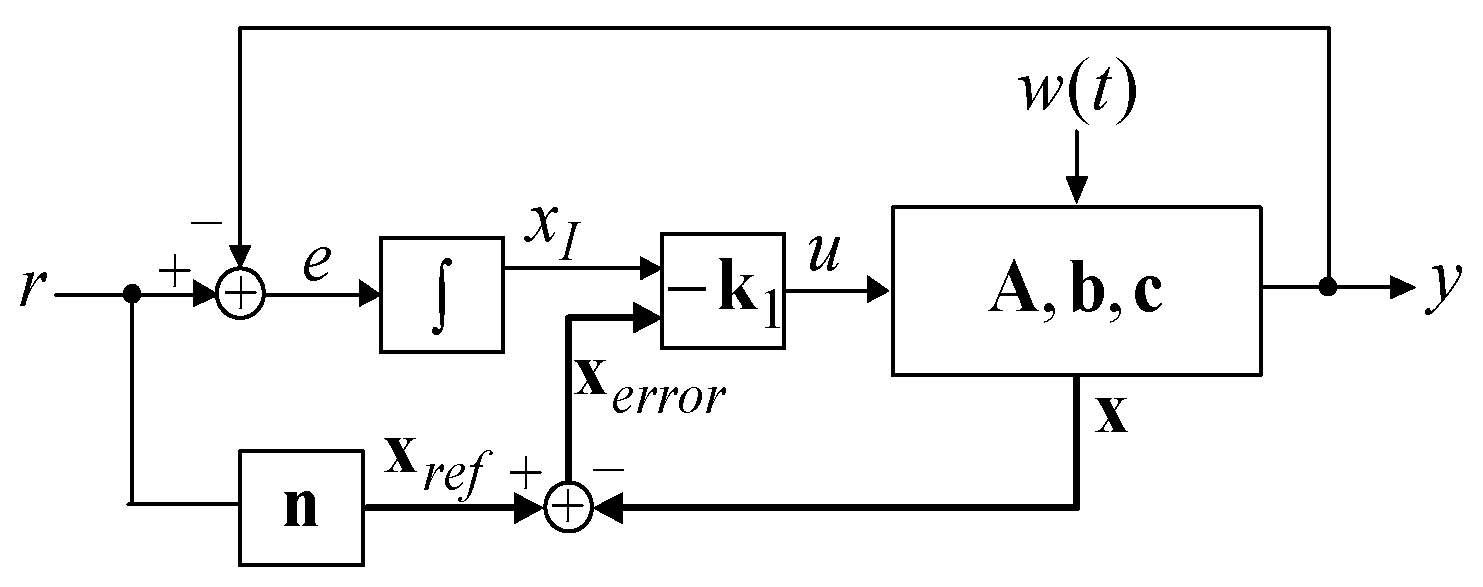
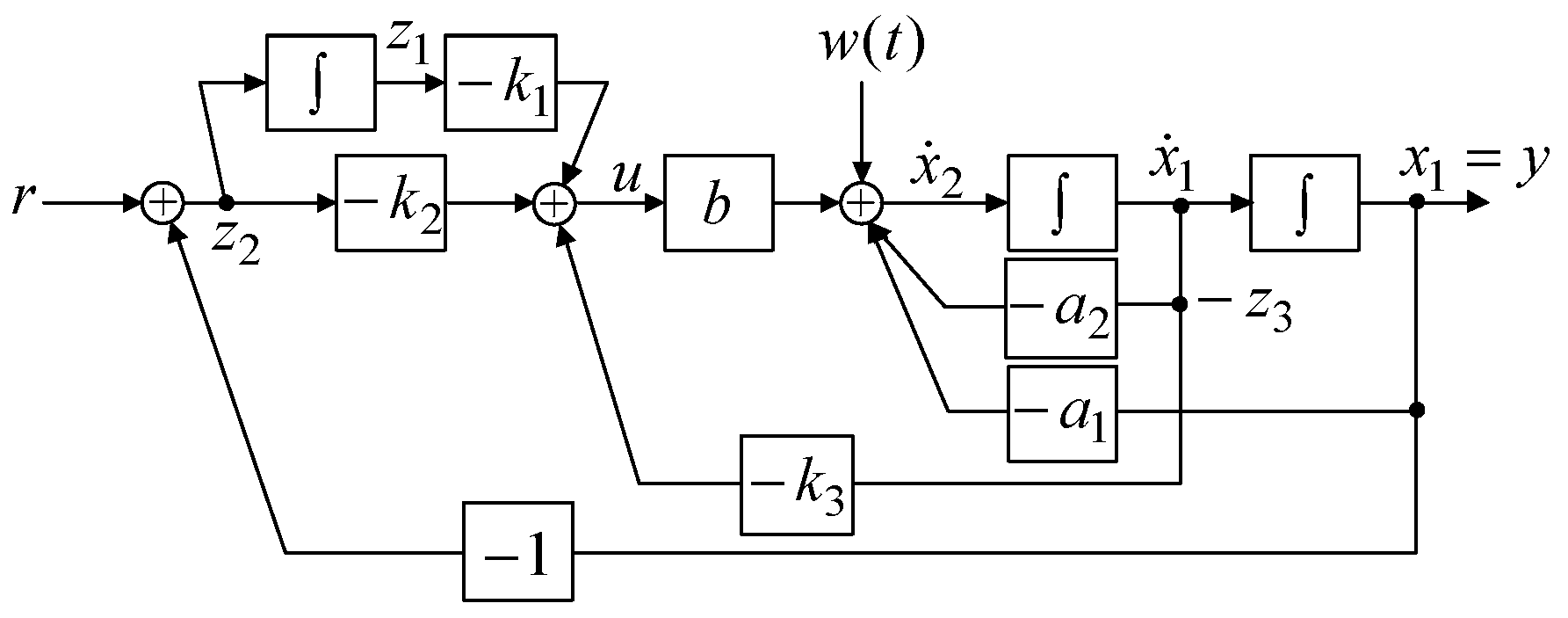
2. Controller Design Using State Feedback and Integral Action
3. Sliding Mode Control Design for a Class of Linear System Models with Perturbations
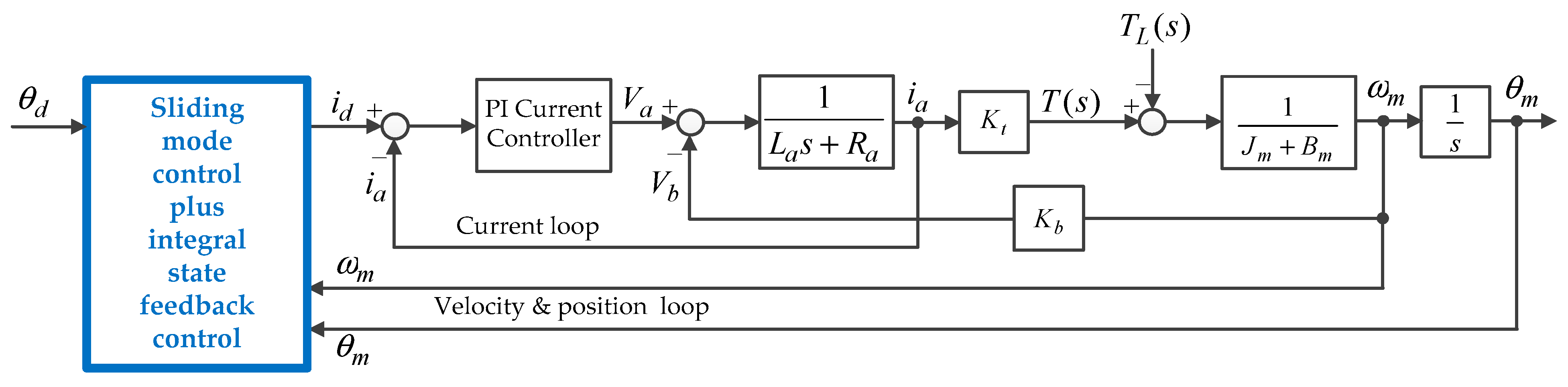
4. The Determination of Sliding Mode Control Law
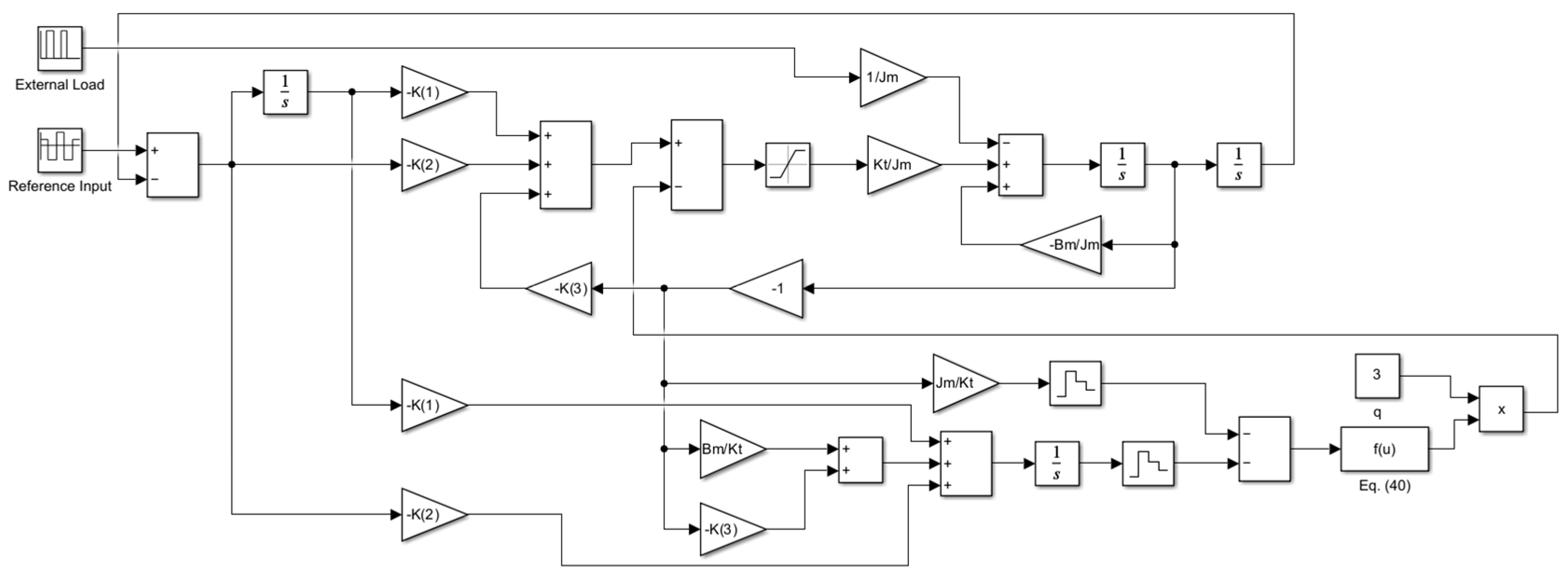
5. Application to the Servo Motor Drive System
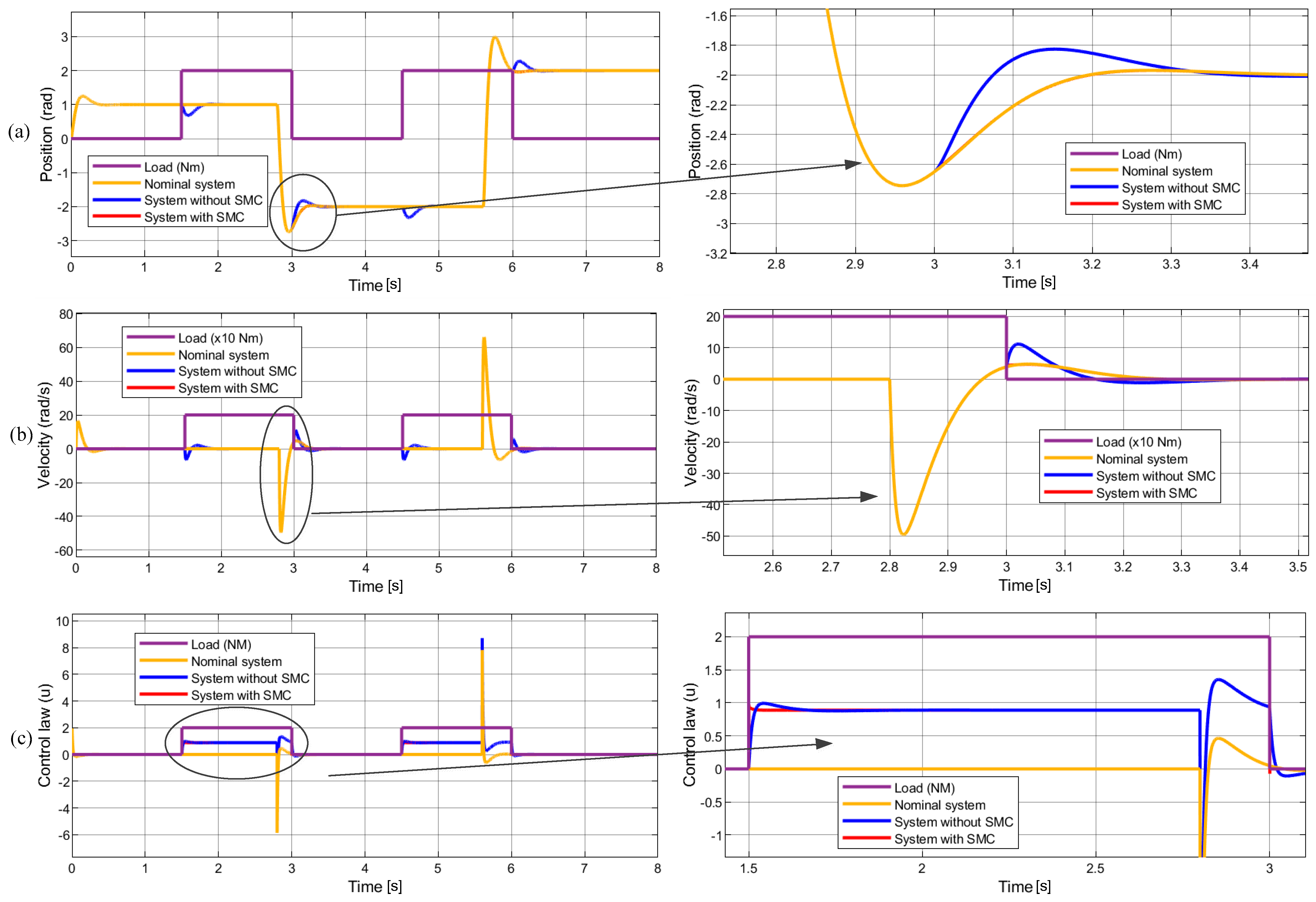
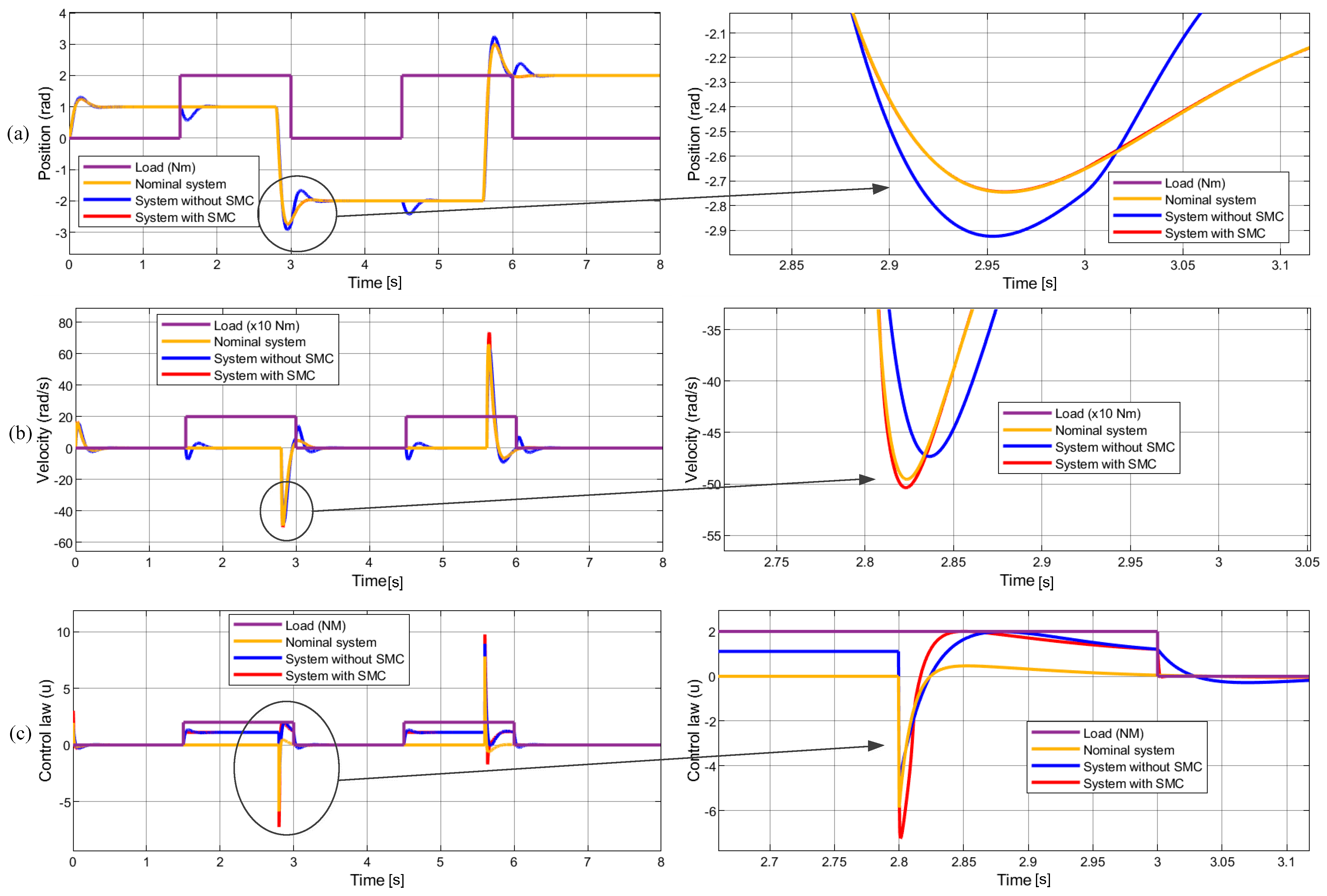
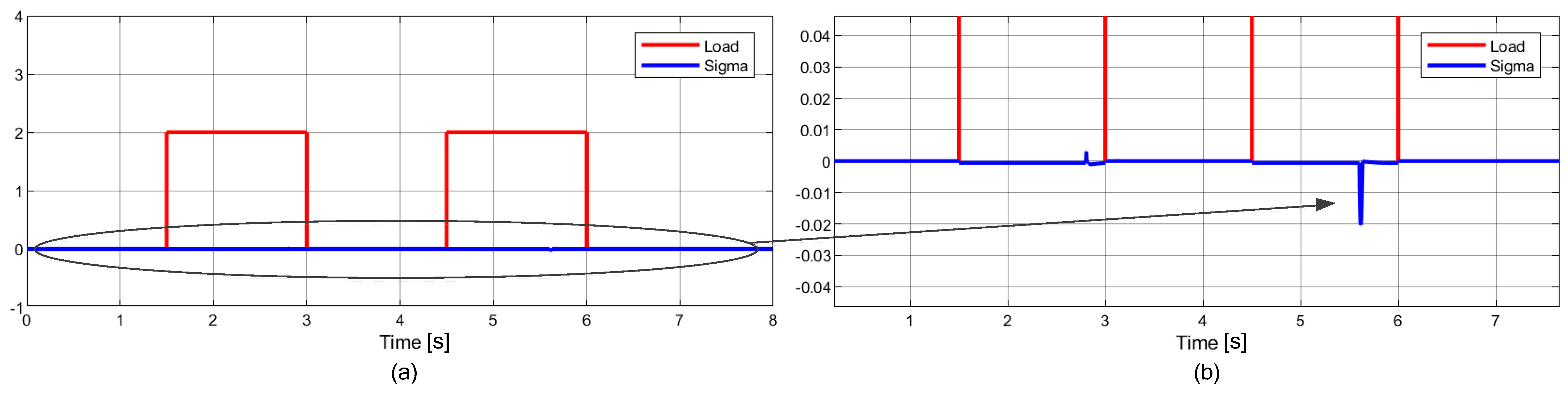
6. Simulation Results and Discussion
6.1. Simulations for Systems under the Conditions of Nominal, Load, and Uncertainty
6.2. Discussion of Chattering
7. Practical Experiment and Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ma’arif, A.; Setiawan, N.R. Control of DC Motor Using Integral State Feedback and Comparison with PID: Simulation and Arduino Implementation. J. Robot. Control JRC 2021, 2, 456–461. [Google Scholar] [CrossRef]
- Kamilu, S.A.; Hakeem, M.D.A.; Olatomiwa, L. Design and Comparative Assessment of State Feedback Controllers for Position Control of 8692 DC Servomotor. Int. J. Intell. Syst. Appl. 2015, 7, 28–33. [Google Scholar] [CrossRef]
- Al-Saggafa, U.M.; Mehedia, I.M.; Mansourib, R.; Bettayeb, M. State feedback with fractional integral control design based on the Bode’s ideal transfer function. Int. J. Syst. Sci. 2016, 47, 149–161. [Google Scholar] [CrossRef]
- Coban, R. Backstepping integral sliding mode control of an electromechanical system. Automatika 2018, 58, 266–272. [Google Scholar] [CrossRef]
- Herrera, M.; Leica, P.; Chavez, D.; Camacho, O. A Blended Sliding Mode Control with Linear Quadratic Integral Control based on Reduced Order Model for a VTOL System. In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017), Madrid, Spain, 26–28 July 2017; Volume 1, pp. 606–612. [Google Scholar]
- Wang, W.; Zhang, J. Integral sliding mode variable structure control of DC servo motor speed. In Proceedings of the RICAI’22: Proceedings of the 2022 4th International Conference on Robotics, Intelligent Control and Artificial Intelligence, Dongguan, China, 16–18 December 2022; pp. 928–933. [Google Scholar]
- Sanjuan, J.J.V.; Contreras, R.J.M.; Mendoza, E.Y.; Flores, J.L.; Bravo, R.O.; Tlaxcaltecatl, M.E. Design and Modeling of Integral Control State-feedback Controller for PMSM. In Proceedings of the 2018 15th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 5–7 September 2018. [Google Scholar]
- Templos-Santos, J.L.; Aguilar-Mejia, O.; Beltran-Carbajal, F.; Gonzalez, A.V.; Tapia-Olver, R. Integral Action in Sliding Mode Control for Reduction of Chattering in Speed Regulation of a Synchronous Motor. J. Phys. Conf. Ser. 2019, 1221, 012060. [Google Scholar] [CrossRef]
- Baik, I.-C.; Kim, K.-H.; Youn, M.-J. Robust Nonlinear Speed Control of PM Synchronous Motor Using Boundary Layer Integral Sliding Mode Control Technique. IEEE Trans. Control Syst. Technol. 2000, 8, 47–54. [Google Scholar] [CrossRef]
- Suh, S.; Kim, W. Position Control Based on Add-on-Type Iterative Learning Control with Nonlinear Controller for Permanent-Magnet Stepper Motors. Appl. Sci. 2021, 11, 587. [Google Scholar] [CrossRef]
- Lai, C.-K.; Lin, B.-W.; Lai, H.-Y.; Chen, G.-Y. FPGA-Based Hybrid Stepper Motor Drive System Design by Variable Structure Control. Actuators 2021, 10, 113. [Google Scholar] [CrossRef]
- Yu, J.; Zhuang, J.; Yu, D. State feedback integral control for a rotary direct drive servo valve using a Lyapunov function approach. ISA Trans. 2015, 54, 207–217. [Google Scholar] [CrossRef]
- Kao, S.-T.; Chiou, W.-J.; Ho, M.-T. Integral Sliding Mode Control for Trajectory Tracking Control of an Omnidirectional Mobile Robot. In Proceedings of the 2011 8th Asian Control Conference (ASCC), Kaohsiung, Taiwan, 15–18 May 2011. [Google Scholar]
- Jouini, M.; Dhahri, S.; Sellami, A. Combination of integral sliding mode control design with optimal feedback control for nonlinear uncertain systems. Trans. Inst. Meas. Control 2018, 41, 1331–1339. [Google Scholar] [CrossRef]
- Gao, W.; Hung, J.C. Variable Structure Control of Nonlinear Systems: A New Approach. IEEE Trans. Ind. Electron. 1993, 40, 45–55. [Google Scholar]
- Tanralili, A.M.R.; Al Tahtawi, A.R.; Martin. Integral State Feedback Control Design for 2-DOF Dynamixel AX-12 Manipulator Robot. In Proceedings of the 2023 10th International Conference on Information Technology, Computer, and Electrical Engineering (ICITACEE), Semarang, Indonesia, 31 August–1 September 2023. [Google Scholar]
- Al-Baidhani, H.; Sahib, A.; Kazimierczuk, M.K. State Feedback with Integral Control Circuit Design of DC-DC Buck-Boost Converter. Mathematics 2023, 11, 2139. [Google Scholar] [CrossRef]
- Gudey, S.K.; Gupta, R. Reduced state feedback sliding-mode current control for voltage source inverter-based higher-order circuit. IET Power Electron. 2015, 8, 1367–1376. [Google Scholar] [CrossRef]
- Patri, K.K.; Samanta, S. State Feedback With Integral Control for Boost Converter & Its Microcontroller Implementation. In Proceedings of the 2018 IEEMA Engineer Infinite Conference (eTechNxT), New Delhi, India, 13–14 March 2018. [Google Scholar]
- Ghosh, S.K.; Roy, T.K.; Pramanik, M.A.H.; Mahmud, M.A. Design of Nonlinear Backstepping Double-Integral Sliding Mode Controllers to Stabilize the DC-Bus Voltage for DC–DC Converters Feeding CPLs. Energies 2021, 14, 6753. [Google Scholar] [CrossRef]
- Agrawal, N.; Samanta, S.; Ghosh, S. Optimal State Feedback-Integral Control of Fuel-Cell Integrated Boost Converter. IEEE Trans. Circuits Syst.—II Express Briefs 2022, 69, 1382–1386. [Google Scholar] [CrossRef]
- Baghel, N.K.; Kobaku, T.; Jeyasenthil, R.; Ghorai, P.; Rajhans, C. Augmentation of State Feedback Control and Integral Action for Stabilization Issues in Islanded DC Microgrid. In Proceedings of the 2022 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 14–17 December 2022. [Google Scholar]
- Vernekar, P.; Bandal, V. Robust Sliding Mode Control of a Magnetic Levitation System: Continuous-Time and Discrete-Time Approaches. arXiv 2021, arXiv:2110.12363. [Google Scholar]
- Yu, X.-N.; Hao, L.-Y. Integral sliding mode fault tolerant control for unmanned surface vessels with quantization: Less iterations. Ocean Eng. 2022, 260, 111820. [Google Scholar] [CrossRef]
- Winursito, A.; Dhewa, O.A.; Nasuha, A.; Pratama, G.N.P. Integral State Feedback Controller with Coefficient Diagram Method for USV Heading Control. In Proceedings of the 2022 5th International Conference on Information and Communications Technology (ICOIACT), Yogyakarta, Indonesia, 24–25 August 2022. [Google Scholar]
- Mahmood, A.; Bhatti, A.I.; Siddique, B.A. Landing of Aircraft Using Integral State Feedback Sliding Mode Control. In Proceedings of the 1st International Conference on Electrical, Communication and Computer Engineering (ICECCE), Swat, Pakistan, 24–25 July 2019. [Google Scholar]
- Eltayeb, A.; Rahmat, M.F.; Basri, M.A.M.; Mahmoud, M.S. An Improved Design of Integral Sliding Mode Controller for Chattering Attenuation and Trajectory Tracking of the Quadrotor UAV. Arab. J. Sci. Eng. 2020, 45, 6949–6961. [Google Scholar] [CrossRef]
- Seeber, R.; Tranninger, M. Integral state-feedback control of linear time-varying systems: A performance preserving approach. Automatica 2022, 136, 110000. [Google Scholar] [CrossRef]
- Shyu, K.-K.; Hung, J.C. Totally invariant variable structure control systems. In Proceedings of the IECON’97 23rd International Conference on Industrial Electronics, Control, and Instrumentation, New Orleans, LA, USA, 14 November 1997. [Google Scholar]
- Behera, A.K.; Bandyopadhyay, B.; Spurgeon, S.K. Arbitrary Pole Placement with Sliding Mode Control. In Proceedings of the 2022 16th International Workshop on Variable Structure Systems (VSS), Rio de Janeiro, Brazil, 11–14 September 2022. [Google Scholar]
- Ali, H.I.; Abdulridha, A.J. State Feedback Sliding Mode Controller Design for Human Swing Leg System. Al-Nahrain J. Eng. Sci. 2018, 21, 51–59. [Google Scholar] [CrossRef]
- Bhaskarwar, T.; Hawari, H.F.; Nor, N.B.M.; Chile, R.H.; Waghmare, D.; Aole, S. Sliding Mode Controller with Generalized Extended State Observer for Single Link Flexible Manipulator. Appl. Sci. 2022, 12, 3079. [Google Scholar] [CrossRef]
- Franklin, G.F.; Powell, J.D.; Workman, M. Digital Control of Dynamic Systems, 3rd ed.; Addison Wesley Longman, Inc.: Menlo Park, CA, 1998. [Google Scholar]
- Lai, C.-K.; Shyu, K.-K. A Novel Motor Drive Design for Incremental Motion System via Sliding-Mode Control Method. IEEE Trans. Ind. Electron. 2005, 52, 499–507. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value | Variation Range |
|---|---|---|
| Inertia () | 0.002 | [−0.001, +0.001] |
| Viscous friction () | 0.0015 | [−0.00075, 0.00075] |
| Torque constant (Nm/A) | 2.25 | [−0.45, 0] |
| Feedback gain | [−17.7778, −1.9556, −0.1060] | |
| q | 3 | |
| Position/speed loop sampling frequency | 2 kHz | |
| External load | 2 Nm |
| Parameter Name | Value | Variation Range |
|---|---|---|
| 0.021675 | 0.01445 | |
| 0.003724 | 0 | |
| 0.01041 | 0 | |
| [−0.7, −0.005, −0.1] | ||
| q | 3 | |
| Position/speed loop sampling frequency | 2 kHz | |
| External load | 0.002 Nm | |
| Current PI controller | 20 + 10/s | |
| Current loop sampling frequency | 20 kHz |
| Case | Conditions | External Load |
|---|---|---|
| 1 | 0 | |
| 2 | 0.002 Nm | |
| 3 | 0.002 Nm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, C.-K.; Chen, J.-Z.; Chan, S.-T. A Novel Robust Control System Design and Its Application to Servo Motor Drive. Appl. Sci. 2024, 14, 1083. https://doi.org/10.3390/app14031083
Lai C-K, Chen J-Z, Chan S-T. A Novel Robust Control System Design and Its Application to Servo Motor Drive. Applied Sciences. 2024; 14(3):1083. https://doi.org/10.3390/app14031083
Chicago/Turabian StyleLai, Chiu-Keng, Jun-Ze Chen, and Shang-Ting Chan. 2024. "A Novel Robust Control System Design and Its Application to Servo Motor Drive" Applied Sciences 14, no. 3: 1083. https://doi.org/10.3390/app14031083
APA StyleLai, C.-K., Chen, J.-Z., & Chan, S.-T. (2024). A Novel Robust Control System Design and Its Application to Servo Motor Drive. Applied Sciences, 14(3), 1083. https://doi.org/10.3390/app14031083