
Transferability Assessment of OBD-Related Calibration and Validation Activities from the Vehicle to HiL Applications
 , , ,
, , ,
Abstract
:1. Introduction
1.1. Motivation
1.2. HiL-Based Virtual Calibration and Validation
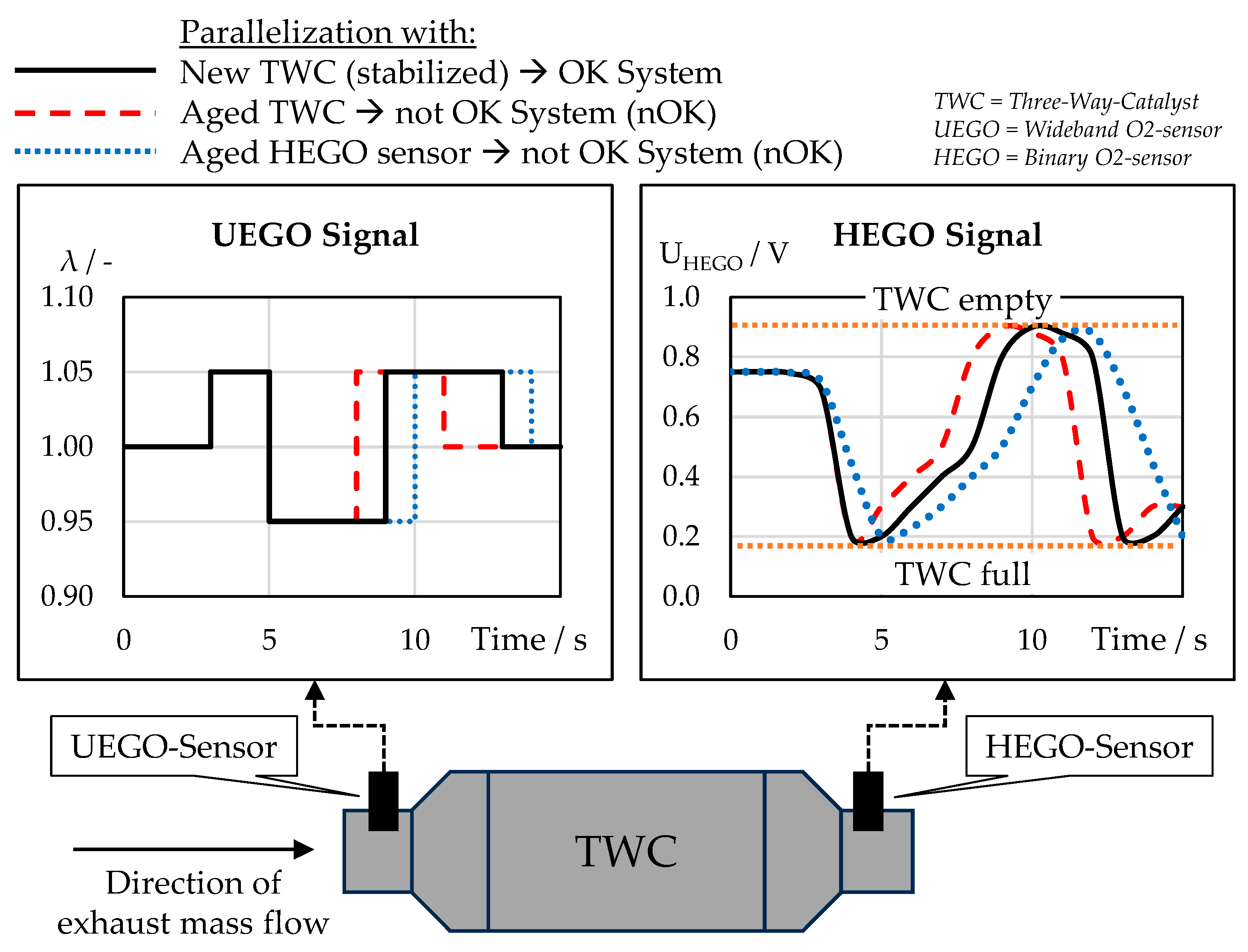
1.3. Case Example—Technical Fundamentals
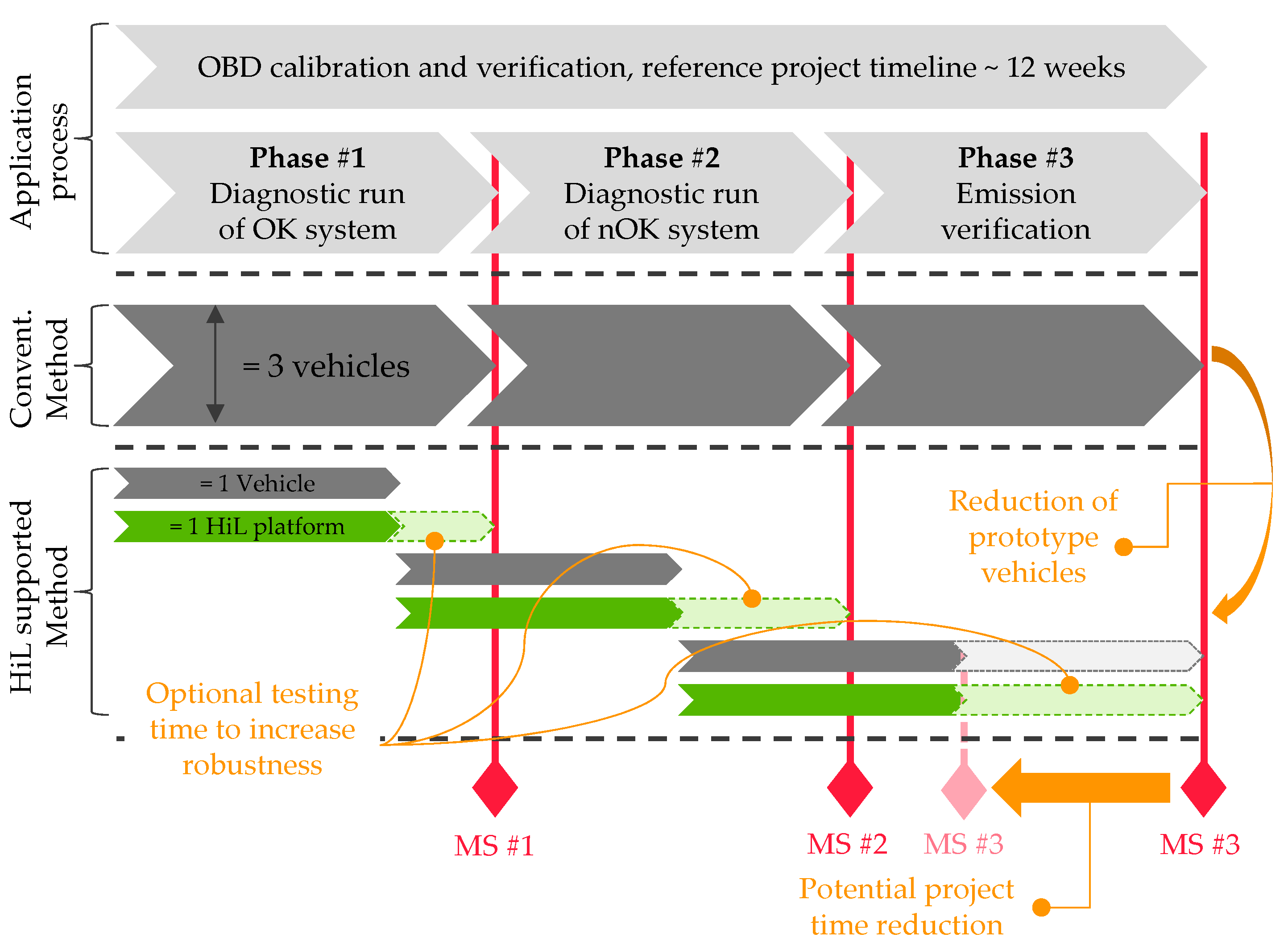
1.4. Reference Project Timeline and Benefits
2. Materials and Methods
2.1. Reference Powertrain and Reference Vehicle
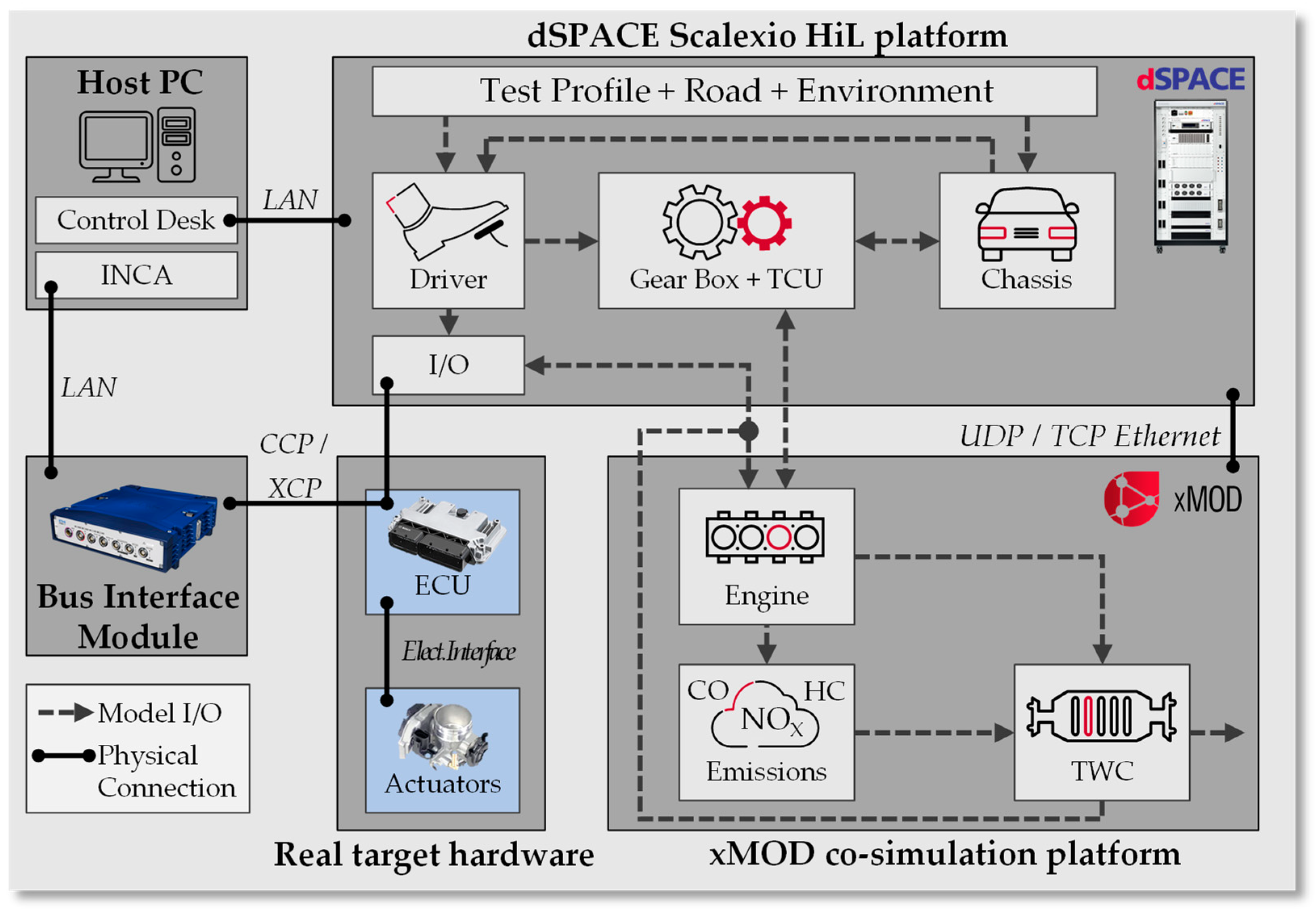
2.2. Real-Time Co-Simulation Platform
3. Results—HiL-Based Calibration and Validation of TWC and HEGO Diagnoses
3.1. Phase #1—Diagnostic Run with an OK System
3.2. Phase #2—Diagnostic Run with an Not OK System
3.3. Phase #3—Emission Verification
4. Discussion
- The HiL platform enables a high degree of test automatization via dedicated automatization units (e.g., a failure insertion unit to simulate electrical faults). Furthermore, automated calibration can be realized using an application programming interface (API) to connect the automatization unit of the HiL platform with the calibration software (e.g., INCA V7.2). This advantage enables 24/7 testing with only limited human supervision. Furthermore, it paves the way for advanced software testing by executing test cases and sequences in an intelligent way.
- The target powertrain components that are to be diagnosed can be easily replaced by corresponding failure components. Both real hardware (e.g., real throttle valve) and simulated hardware (e.g., simulated aged TWC) can be connected to the HiL platform and can be replaced quickly and automatically. With this advantage, elaborate workshop activities can be reduced to a minimum.
- Virtual preconditioning for cold start tests enables the elimination of long vehicle conditioning times and avoids the use of expensive climate chambers. Furthermore, a high degree of test reproducibility in terms of oil and coolant start temperatures is achieved.
- Conventional tools such as a fault simulation device (e.g., a break-out box) can be used. This advantage allows the conventional calibration engineer to use the virtual environment using his trusted tools and his established methods.
- If the same number and type of test cases as during the conventional process is maintained, a strong reduction in total project time and thus costs can be achieved.
- If no project time reduction is aimed, the number of test cases can be greatly increased. This results in a significant increase in the robustness and thus the final OBD calibration.
- Reducing the number of real-world tests to perform selected OBD calibration and/or verification work packages allows for a significantly and more flexible development process that does not heavily rely solely on expensive and scarce resources, such as powertrain testing facilities and prototype vehicles. Obviously, a specific combination of points 1, 2 and 3 would be conceivable as well.
5. Summary
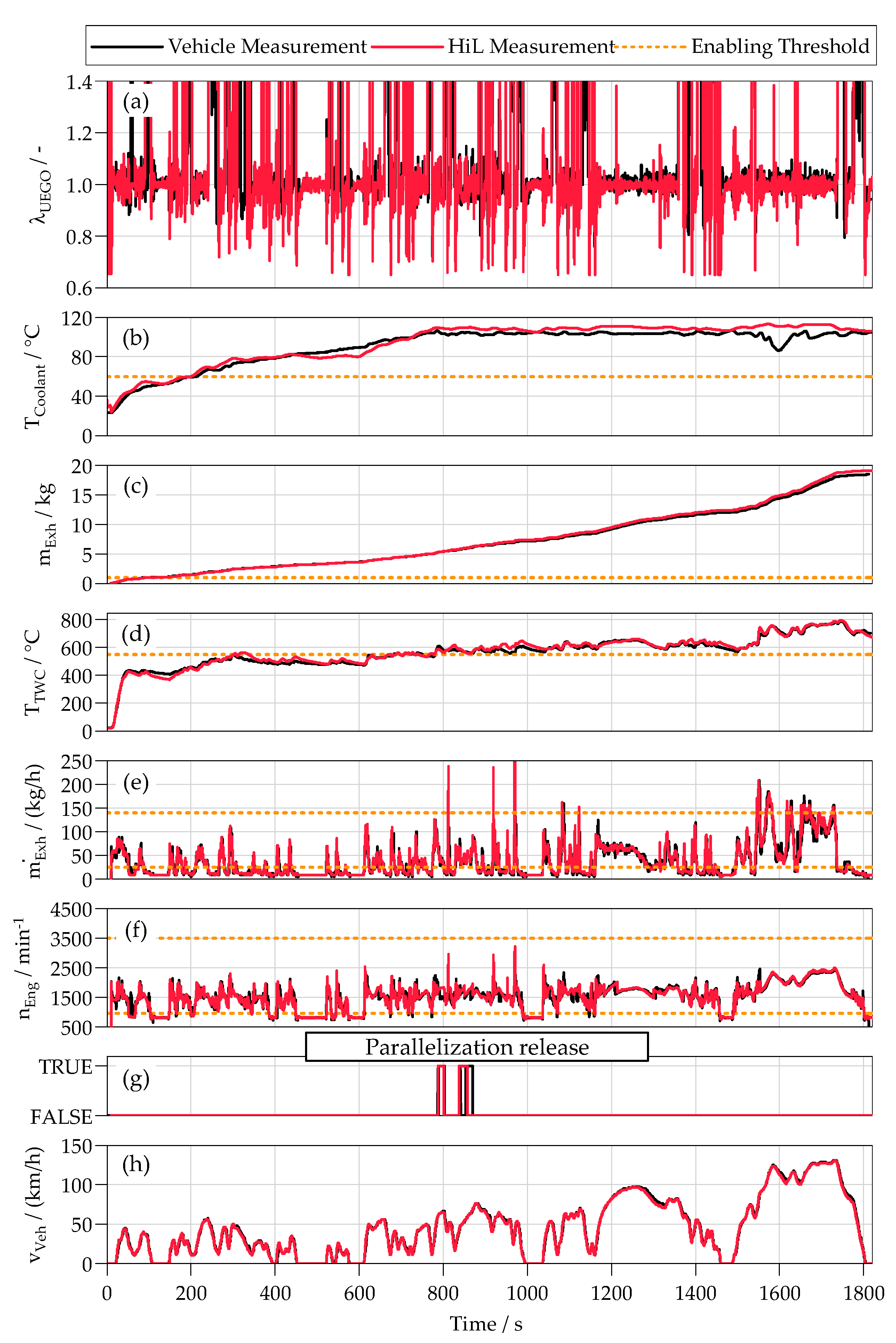
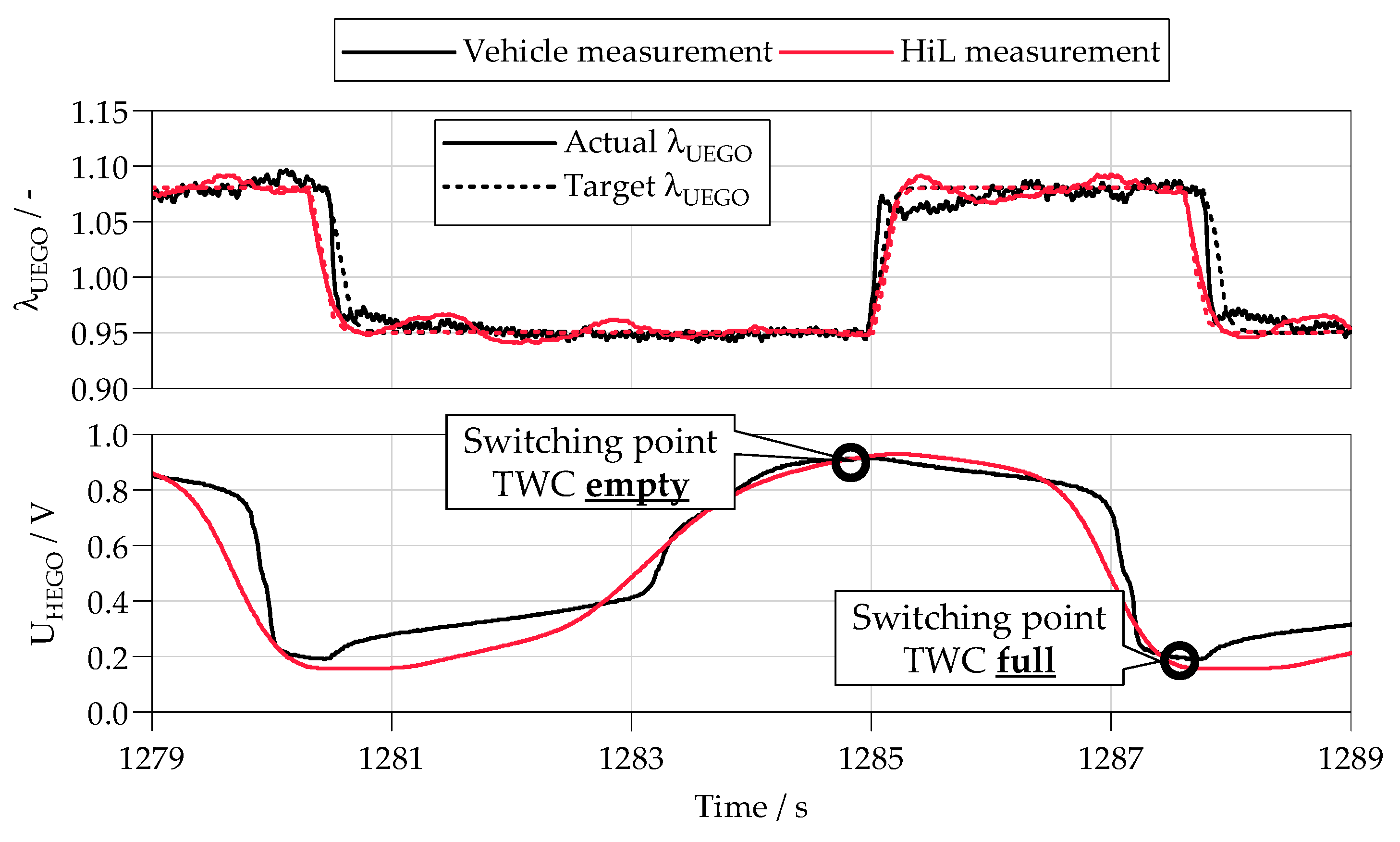
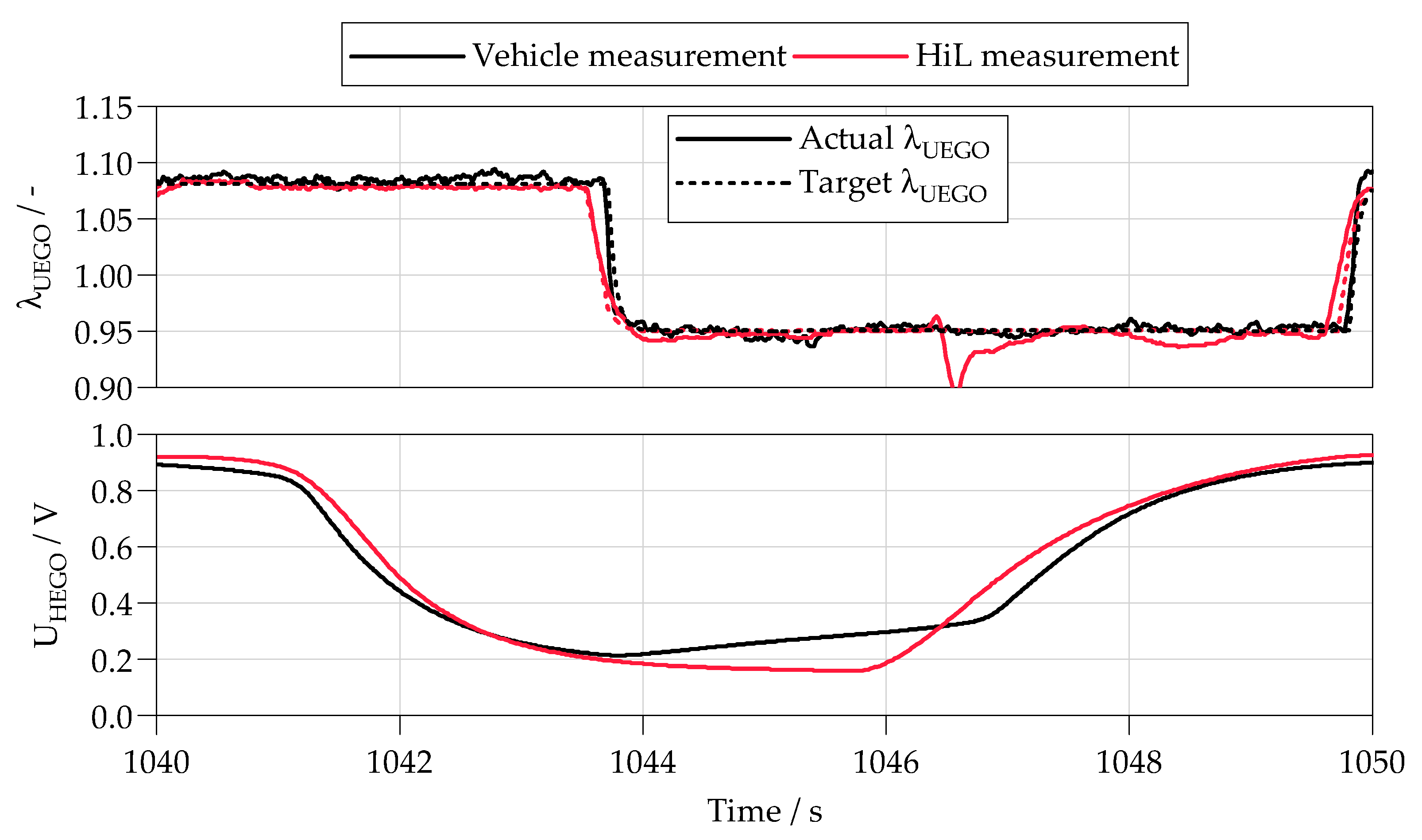
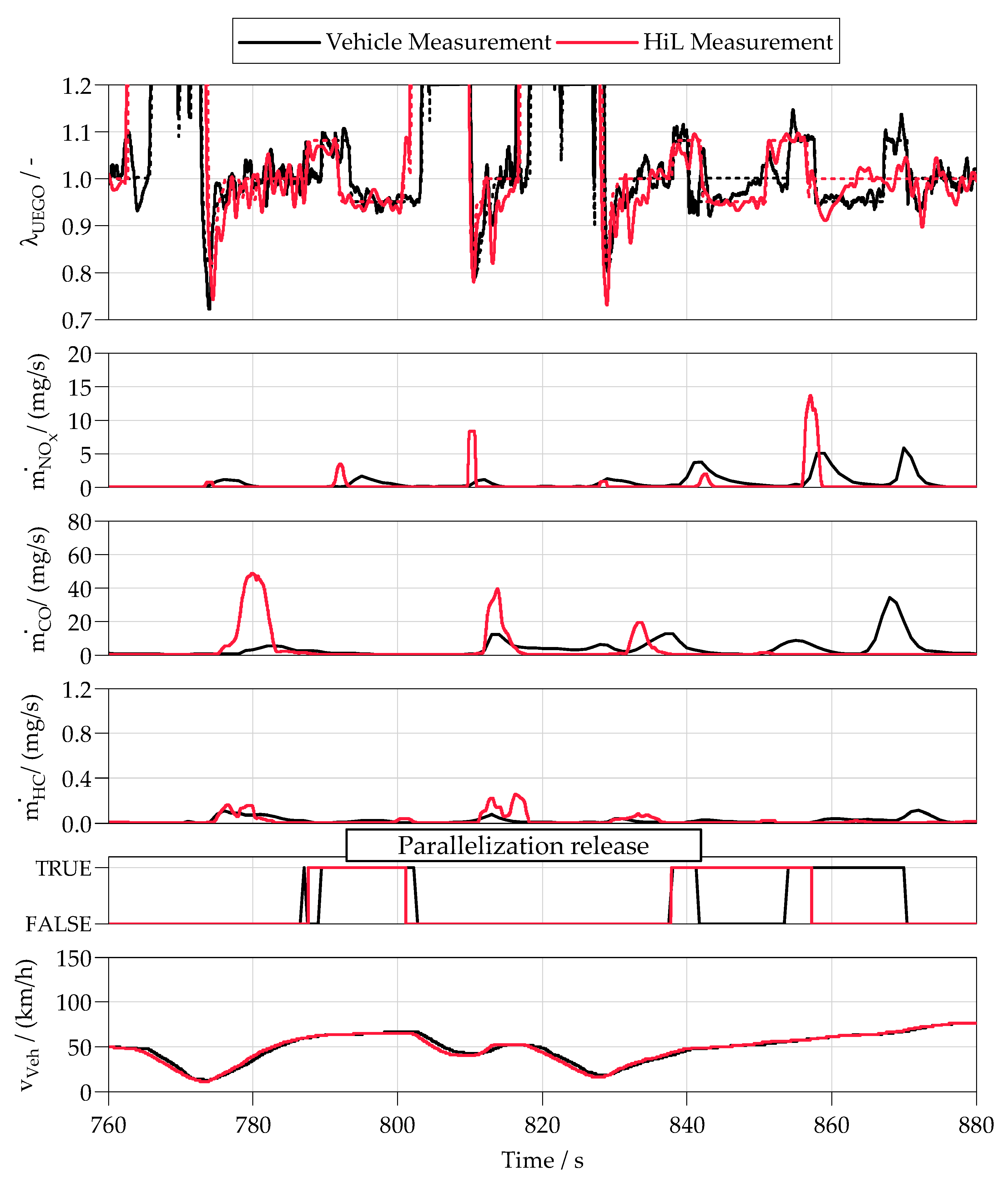
- Phase #1—All simulated physical signals required to release the respective diagnostic event (release conditions) show good agreement with real vehicle measurement data, resulting in the diagnostic event occurring at approximately the same time during a WLTC drive cycle on both the HiL and the vehicle. It was also shown that during the diagnostic run on the HiL platform, all relevant characteristics of the most important sensor signals (UEGO and HEGO sensor signals) were modelled with sufficient accuracy and led to valid diagnostic results over the entire operating range.
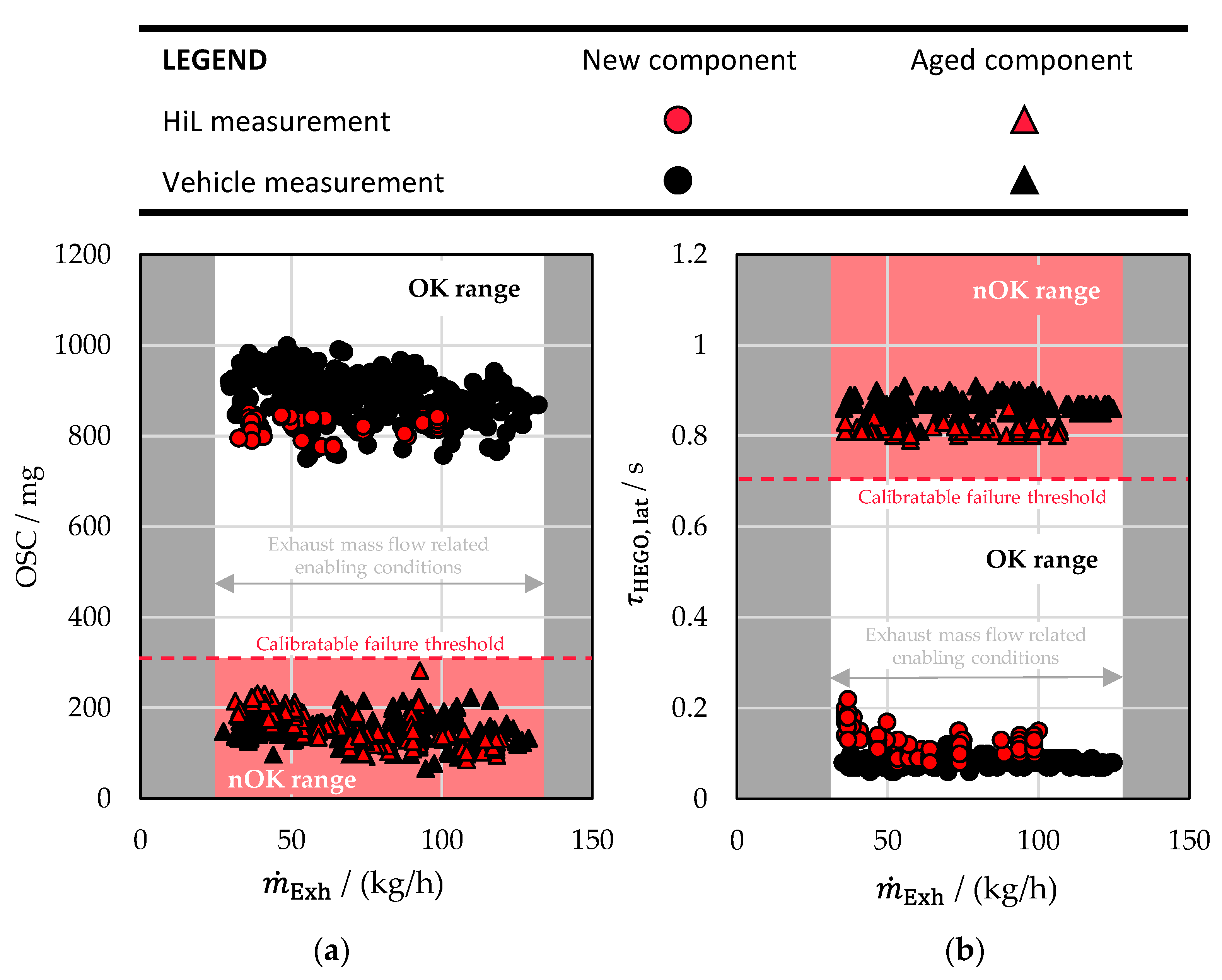
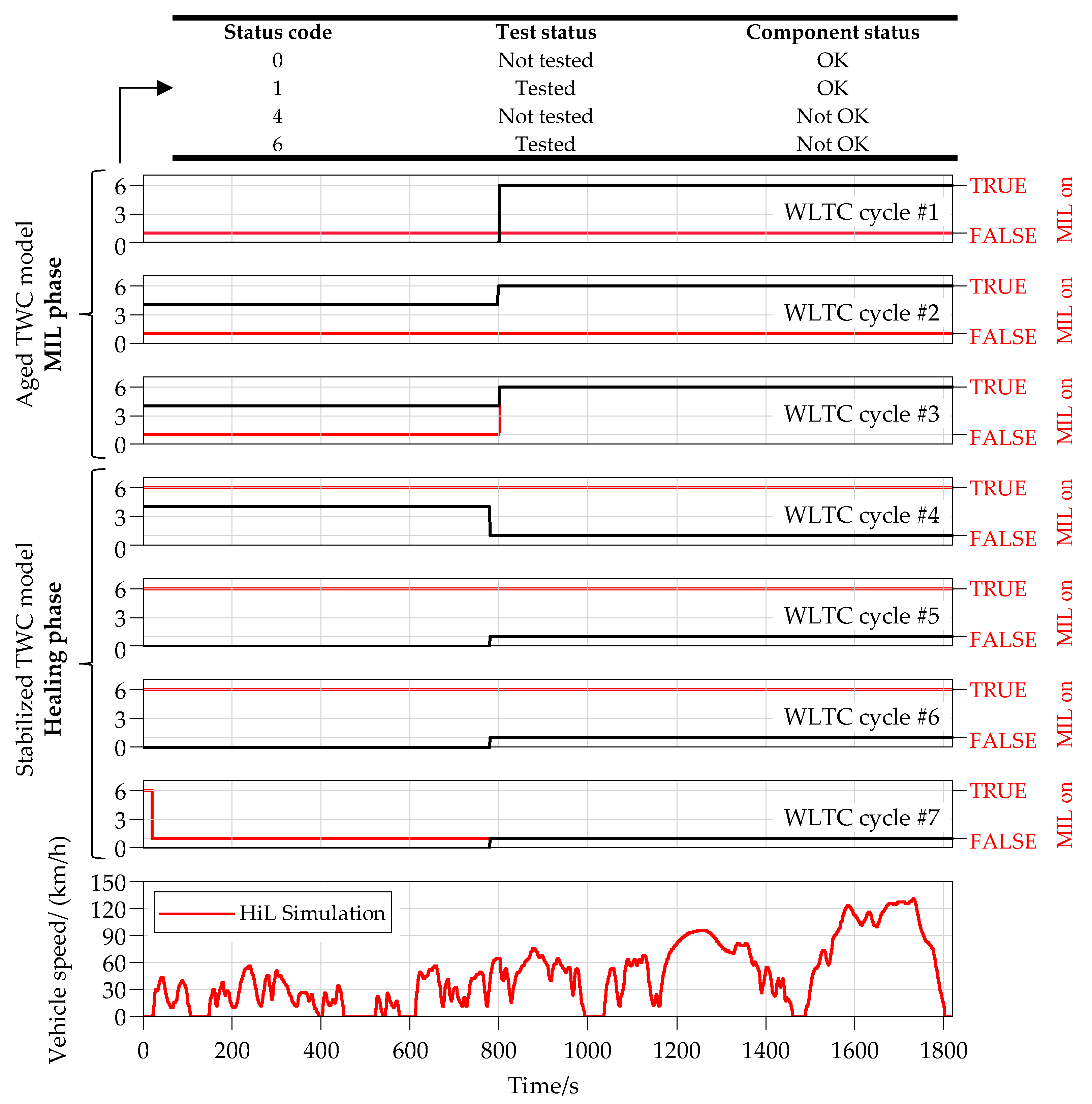
- Phase #2—The respective fault patterns for both aged TWC and latent HEGO sensors are well represented on the HiL platform, which likewise leads to valid diagnostic results over the entire operating range.
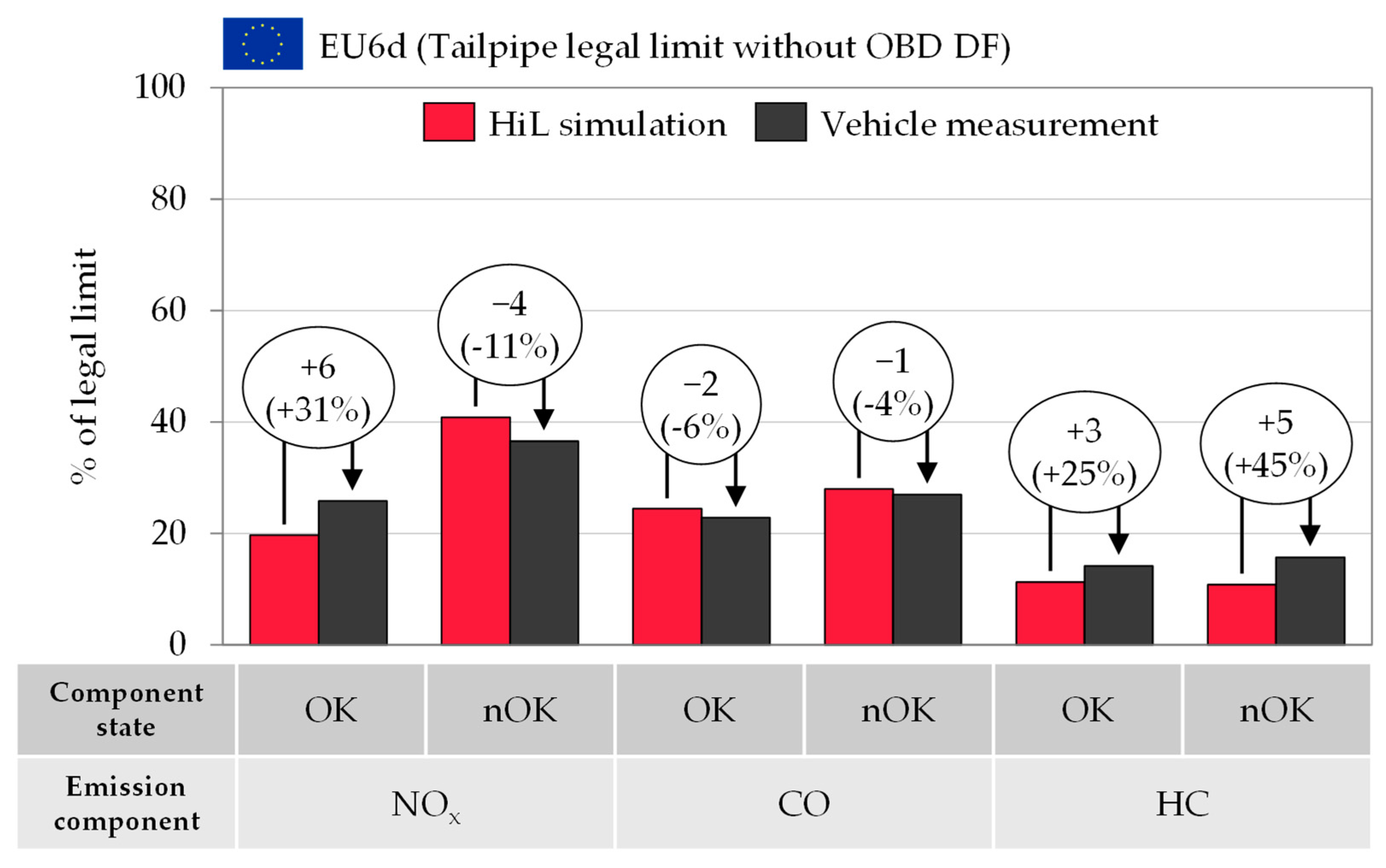
- Phase #3—The relevant gaseous emission results at the tailpipe are well represented in the HiL-simulation in comparison to real vehicle measurements, both for a new system and for aged components. The simulation accuracy obtained (simulation vs. vehicle measurement) is as follows:
- NOx emission +31% (6%-point with regards to the EU6d legal limit) considering an OK-system and −11% (−4%-point with regards to the EU6d legal limit) considering a nOK system.
- CO emissions −6% (−2%-point with regards to the EU6d legal limit) considering an OK-system and −4% (−1%-point with regards to the EU6d legal limit) considering a nOK system.
- HC emissions +25% (3%-point with regards to the EU6d legal limit) considering an OK system and +45% (+5%-point with regards to the EU6d legal limit) considering a nOK system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| WLTP | Worldwide harmonized Light vehicles Test Procedure |
| RDE | Real Driving Emissions |
| OEM | Original Equipment Manufacturer |
| GPF | Gasoline Particulate Filter |
| EATS | Exhaust Aftertreatment System |
| HC | Hydrocarbon |
| CO | Carbon Monoxide |
| NOx | Nitrogen Oxide |
| OBD | On-Board Diagnosis |
| HiL | Hardware-in-the-Loop |
| TWC | Three-Way Catalyst |
| ECU | Engine Control Unit |
| TCU | Transmission Control Unit |
| HEGO | Heated Exhaust Gas Oxygen sensor |
| OSC | Oxygen Storage Capacity |
| nOK | not OK |
| UEGO | Universal Exhaust Gas Oxygen sensor |
| GDI | Gasoline Direct Injection |
| FWD | Front Wheel Drive |
| DSM | Diagnostic State Manager |
| WLTC | Worldwide Harmonized Light-Duty Test Cycle |
| MIL | Malfunction Indicator Light |
| CVS | Constant Volume Flow Sampling |
| API | Application Programming Interface |
| DF | Deterioration Factor |
Appendix A

References
- Maurer, R.; Yadla, S.K.; Balazs, A.; Thewes, M.; Walter, V.; Uhlmann, T. Designing Zero Impact Emission Vehicle Concepts. In Experten-Forum Powertrain: Ladungswechsel und Emissionierung 2020; Liebl, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2021; pp. 75–116. ISBN 978-3-662-63523-0. [Google Scholar]
- Mulholland, E.; Miller, J.; Bernard, Y.; Lee, K.; Rodríguez, F. The role of NOx emission reductions in Euro 7/VII vehicle emission standards to reduce adverse health impacts in the EU27 through 2050. Transp. Eng. 2022, 9, 100133. [Google Scholar] [CrossRef]
- European Commission. The European Green Deal: Communication from the Commission to the European Parliament, the European Council, the Council, the European Economic and Social Committee and The Committee of the Regions; European Commission: Brussels, Belgium, 2019; Volume 640.
- 2022/0365(COD); Final Text of the Agreement—Regulation on Type-Approval of Motor Vehicles and Engines and of Systems, Components and Separate Technical units Intended for Such Vehicles, with Respect to Their Emissions and Battery Durability (Euro 7). 2023. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A52022PC0586 (accessed on 20 January 2024).
- European Comission. Proposal for a Regulation of the European Parliament and of the Council on Type-Approval of Motor Vehicles and Engines and of Systems, Components and Separate Technical Units Intended for Such Vehicles, with Respect to Their Emissions and Battery Durability (Euro 7) and Repealing Regulations (EC) No 715/2007 and (EC) No 595/2009; Proposal; European Commission: Brussels, Belgium, 2022.
- Dorscheidt, F.; Sterlepper, S.; Görgen, M.; Nijs, M.; Claßen, J.; Yadla, S.K.; Maurer, R.; Pischinger, S.; Krysmon, S.; Abdelkader, A. Gasoline Particulate Filter Characterization Focusing on the Filtration Efficiency of Nano-Particulates Down to 10 nm; SAE Technical Paper Series; SAE Powertrains, Fuels & Lubricants Meeting, 22 September 2020; SAE International: Warrendale, PA, USA, 2020. [Google Scholar]
- Archer, G. Principles for Euro Final Standards. In Proceedings of the European Commission Stakeholder Meeting; European Commission: Brussels, Belgium, 2018. [Google Scholar]
- Achleitner, E.; Frenzel, H.; Grimm, J.; Maiwal, O.; Rösel, G.; Senft, P.; Zhang, H. Systemansatz für ein Fahrzeug mit Benzindirekteinspritzung und Partikel Filter im RDE. In Proceedings of the 39. Internationales Wiener Motorensymposium. Internationales Wiener Motorensymposium, Vienna, Austria, 26–27 April 2018; Lenz, H.P., Geringer, B., Eds.; Springer: Wiesbaden, Germany, 2018. [Google Scholar]
- Lanzerath, P.; Wunsch, R.; Schön, C. The first series-production particulate filter for Mercedes-Benz gasoline engines. In 17. Internationales Stuttgarter Symposium; Bargende, M., Reuss, H.-C., Wiedemann, J., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2017; pp. 851–865. ISBN 978-3-658-16987-9. [Google Scholar]
- Proust, M.; Arandyelovitch, A.; Trochet, P.; Mohsen, O.; Gödecke, T.; Koch, P.; Maass, T.; Schnüpke, H. The New 1.0-Liter Turbo Gasoline Engine from the Renault-Nissan Alliance—HR10DDT. In 27. Aachener Kolloquium; Aachener Kolloquium: Aachen, Germany, 2018. [Google Scholar]
- Hentschel, L.; Demmelbauer-Ebner, W.; Theobald, J.; Wendt, W.; Thiele, M.; Blume, H. The New 1.0 l TSI with 85 kW and Petrol Particulate Filter—Clean, Efficient Performance for the Up! GTI. In 26. Aachener Kolloquium; Aachener Kolloquium: Aachen, Germany, 2017. [Google Scholar]
- Commission Regulation (EU) 2017/1151. 2017. Available online: https://eur-lex.europa.eu/eli/reg/2017/1151/oj (accessed on 20 January 2024).
- Sterlepper, S. Entwicklung einer beschleunigten Aschebeladung zur Analyse des Alternungverhaltens von Ottopartikelfiltern. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 2021. [Google Scholar]
- Claßen, J. Entwicklung Statistisch Relevanter Prüfszenarien zur Bewertung der Fahrzeug-Emissionsrobustheit unter Realen Fahrbedingungen. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 2022. [Google Scholar]
- Krysmon, S.; Dorscheidt, F.; Claßen, J.; Düzgün, M.; Pischinger, S. Real Driving Emissions—Conception of a Data-Driven Calibration Methodology for Hybrid Powertrains Combining Statistical Analysis and Virtual Calibration Platforms. Energies 2021, 14, 4747. [Google Scholar] [CrossRef]
- Wasserburger, A.; Hametner, C. Automated Generation of Real Driving Emissions Compliant Drive Cycles Using Conditional Probability Modeling. In Proceedings of the 2020 IEEE Vehicle Power and Propulsion Conference (VPPC), Gijon, Spain, 18 November–16 December 2020; pp. 1–6, ISBN 978-1-7281-8959-8. [Google Scholar]
- Roberts, P.; Mason, A.; Whelan, S.; Tabata, K.; Kondo, Y.; Kumagai, T.; Mumby, R.; Bates, L. RDE Plus—A Road to Rig Development Methodology for Whole Vehicle RDE Compliance: Overview; SAE Technical Paper Series; WCX SAE World Congress Experience, 21 April 2020; SAE International: Warrendale, PA, USA, 2020. [Google Scholar]
- Boger, T.; Rose, D.; He, S.; Joshi, A. Developments for future EU7 regulations and the path to zero impact emissions—A catalyst substrate and filter supplier’s perspective. Transp. Eng. 2022, 10, 100129. [Google Scholar] [CrossRef]
- Giechaskiel, B.; Valverde, V.; Kontses, A.; Melas, A.; Martini, G.; Balazs, A.; Andersson, J.; Samaras, Z.; Dilara, P. Particle Number Emissions of a Euro 6d-Temp Gasoline Vehicle under Extreme Temperatures and Driving Conditions. Catalysts 2021, 11, 607. [Google Scholar] [CrossRef]
- Samaras, Z.C.; Kontses, A.; Dimaratos, A.; Kontses, D.; Balazs, A.; Hausberger, S.; Ntziachristos, L.; Andersson, J.; Ligterink, N.; Aakko-Saksa, P.; et al. A European Regulatory Perspective towards a Euro 7 Proposal. SAE Int. J. Adv. Curr. Prac. Mobil. 2023, 5, 998–1011. [Google Scholar] [CrossRef]
- Szabados, G.; Szűcs, H.; Hézer, J.; Sanders, B. Investigation of Possibilities of λ = 1 Full Load Operation for Gasoline Engines in the Light of Future Emission Regulation. Period. Polytech. Transp. Eng. 2022, 50, 111–127. [Google Scholar] [CrossRef]
- Brück, R.; Stock, H.; Rösel, G.; Achleitner, E.; Graf, F.; Rodatz, P.; Senft, P. Lowest Real Driving Emissions: Solutions for Electrified Gasoline Engines. In 28. Aachener Kolloquium; Aachener Kolloquium: Aachen, Germany, 2019. [Google Scholar]
- Jean, E.; Sommier, T.; Capirchia, M. Electric Heating for Exhaust Converters: The Key to Very Low Emission Levels. In 28. Aachener Kolloquium; Aachener Kolloquium: Aachen, Germany, 2019. [Google Scholar]
- Andert, J.; Xia, F.; Klein, S.; Guse, D.; Savelsberg, R.; Tharmakulasingam, R.; Thewes, M.; Scharf, J. Road-to-rig-to-desktop: Virtual development using real-time engine modelling and powertrain co-simulation. Int. J. Engine Res. 2019, 20, 686–695. [Google Scholar] [CrossRef]
- Xia, F.; Lee, S.-Y.; Andert, J.; Kampmeier, A.; Scheel, T.; Ehrly, M.; Tharmakulasingam, R.; Takahashi, Y.; Kumagai, T. Crank-Angle Resolved Real-Time Engine Modelling: A Seamless Transfer from Concept Design to HiL Testing. SAE Int. J. Engines 2018, 11, 1385–1398. [Google Scholar] [CrossRef]
- Dorscheidt, F.; Pischinger, S.; Claßen, J.; Sterlepper, S.; Krysmon, S.; Görgen, M.; Nijs, M.; Straszak, P.; Abdelkader, A.M. Development of a Novel Gasoline Particulate Filter Loading Method Using a Burner Bench. Energies 2021, 14, 4914. [Google Scholar] [CrossRef]
- Fathy, H.K.; Filipi, Z.S.; Hagena, J.; Stein, J.L. Review of hardware-in-the-loop simulation and its prospects in the automotive area. In Proceedings of the Modeling and Simulation for Military Applications. Defense and Security Symposium, Orlando, FL, USA, 17 April 2006; Schum, K., Sisti, A.F., Eds.; SPIE: Bellingham, WA, USA, 2006; p. 62280E. [Google Scholar]
- Fagcang, H.; Stobart, R.; Steffen, T. A review of component-in-the-loop: Cyber-physical experiments for rapid system development and integration. Adv. Mech. Eng. 2022, 14, 168781322211099. [Google Scholar] [CrossRef]
- Lee, S.-Y.; Andert, J.; Neumann, D.; Querel, C.; Scheel, T.; Aktas, S.; Miccio, M.; Schaub, J.; Koetter, M.; Ehrly, M. Hardware-in-the-Loop-Based Virtual Calibration Approach to Meet Real Driving Emissions Requirements; SAE Technical Paper Series; WCX World Congress Experience, 10 April 2018; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Lee, S.Y. Virtuelle Kalibrierung von Motorsteuergeräten Mittels Hardware-in-the-Loop Simulationen. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 2023. [Google Scholar]
- Lee, S.-Y.; Andert, J.; Quérel, C.; Schaub, J.; Kötter, M.; Politsch, D.; Hadj-amor, H. X-in-the-Loop-basierte Kalibrierung: HiL Simulation eines virtuellen Dieselantriebsstrangs. In Simulation und Test 2017; Liebl, J., Beidl, C., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2018; pp. 53–79. ISBN 978-3-658-20827-1. [Google Scholar]
- Lee, S.-Y.; Picerno, M.; Andert, J.; Ehrly, M.; Schaub, J.; Schu, F.; Maquet, R.; Gautier, P. Kalibrierung von Motorsteuergeräten mittels virtueller Methoden. In Experten-Forum Powertrain: Simulation und Test 2020; Liebl, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2021; pp. 105–120. ISBN 978-3-662-63605-3. [Google Scholar]
- Picerno, M.; Lee, S.-Y.; Schaub, J.; Ehrly, M.; Millo, F.; Scassa, M.; Andert, J. Co-Simulation of Multi-Domain Engine and its Integrated Control for Transient Driving Cycles. IFAC-PapersOnLine 2020, 53, 13982–13987. [Google Scholar] [CrossRef]
- Riccio, A.; Monzani, F.; Landi, M. Towards a Powerful Hardware-in-the-Loop System for Virtual Calibration of an Off-Road Diesel Engine. Energies 2022, 15, 646. [Google Scholar] [CrossRef]
- Dorscheidt, F.; Düzgün, M.; Claßen, J.; Krysmon, S.; Pischinger, S.; Görgen, M.; Dönitz, C.; Nijs, M. Hardware-in-the-Loop Based Virtual Emission Calibration for a Gasoline Engine; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2021. [Google Scholar]
- Dorfer, F.J. Virtuelle Kalibrierung von Emissionen für künftige Antriebssysteme. In Ladungswechsel und Emissionierung 2018: Im Spannungsfeld von Luftqualität, Klimaschutz und Elektrifizierung 11. MTZ-Fachtagung; Liebl, J., Ed.; Springer Fachmedien; Springer Vieweg: Wiesbaden, Germany, 2019; pp. 200–214. ISBN 9783658249847. [Google Scholar]
- Xia, F.; Dorscheidt, F.; Lücke, S.; Andert, J.; Gardini, P.; Scheel, T.; Walter, V.; Tharmakulasingam, J.K.R.; Böhmer, M.; Nijs, M. Experimental Proof-of-Concept of HiL Based Virtual Calibration for a Gasoline Engine with a Three-Way-Catalyst; SAE Technical Paper Series; 2019 JSAE/SAE Powertrains, Fuels and Lubricants, 26 August 2019; SAE International: Warrendale, PA, USA, 2019. [Google Scholar]
- Schmidt, H.; Büttner, K.; Prokop, G. Methods for Virtual Validation of Automotive Powertrain Systems in Terms of Vehicle Drivability—A Systematic Literature Review. IEEE Access 2023, 11, 27043–27065. [Google Scholar] [CrossRef]
- Walter, S.; Guse, D.; Klein, S.; Meyer, N.; Andert, J.; Schulze, T. Engine-in-the-Loop—Auswirkung der Echtzeitperformance auf die Abbildungsgüte von Fahrzyklen. In Experten-Forum Powertrain: Simulation und Test 2019; Liebl, J., Ed.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2020; pp. 153–171. ISBN 978-3-658-28706-1. [Google Scholar]
- Mihalič, F.; Truntič, M.; Hren, A. Hardware-in-the-Loop Simulations: A Historical Overview of Engineering Challenges. Electronics 2022, 11, 2462. [Google Scholar] [CrossRef]
- Schmidgal, J. Verfahren zur echtzeitfähigen Simulation dynamischer Emissionsverläufe ausgewählter Schadstoffe von Ottomotoren. Ph.D. Thesis, Universität Kassel, Kassel, Germany, 2010. [Google Scholar]
- Dorscheidt, F.; Meli, M.; Claßen, J.; Krysmon, S.; Pischinger, S.; Görgen, M.; Dönitz, C.; Bailly, P.; Nijs, M. Modelling of Gasoline Engine-Out Emissions Using Artificial Neural Networks. In FISITA World Congress 2021—Technical Programme; FISITA World Congress 2021, September 2021; FISITA: Prag, Czech Republic, 2021; ISBN 9781916025929. [Google Scholar]
- Picerno, M.; Lee, S.-Y.; Pasternak, M.; Siddareddy, R.; Franken, T.; Mauss, F.; Andert, J. Real-Time Emission Prediction with Detailed Chemistry under Transient Conditions for Hardware-in-the-Loop Simulations. Energies 2022, 15, 261. [Google Scholar] [CrossRef]
- Schürholz, K.; Brückner, D.; Abel, D. Modelling the Exhaust Gas Aftertreatment System of a SI Engine Using Artificial Neural Networks. Top. Catal. 2019, 62, 288–295. [Google Scholar] [CrossRef]
- Schürholz, K.; Brückner, D.; Gresser, M.; Abel, D. Modeling of the Three-way Catalytic Converter by Recurrent Neural Networks. IFAC-PapersOnLine 2018, 51, 742–747. [Google Scholar] [CrossRef]
- Odendall, B. Ein vereinfachtes Modell des Lambda-geregelten Dreiwegekatalysators zum Einsatz in Motor-Steuergeräten und zur On-Board-Diagnose. Ph.D. Thesis, Stuttgart University, Stuttgart, Germany, 2017. [Google Scholar]
- Auckenthaler, T.S. Modelling and Control of Three-Way Catalytic Converters; ETH Zurich: Zürich, Switzerland, 2005. [Google Scholar]
- Gottdorf, S. Entwicklung eines echtzeitfähigen semi-physikalischen Motormodells zum Betrieb von Ottomotoren und der virtuellen Kalibrierung von Steuergeräten. Ph.D. Thesis, RWTH Aachen University, Aachene, Germany, 2021. [Google Scholar]
- Düzgün, M.T.; Dorscheidt, F.; Krysmon, S.; Bailly, P.; Lee, S.-Y.; Dönitz, C.; Pischinger, S. Virtual Multi-Criterial Calibration of Operating Strategies for Hybrid-Electric Powertrains. Vehicles 2023, 5, 1367–1383. [Google Scholar] [CrossRef]
- Rathod, D.; Hoffman, M.A.; Onori, S. Determining Three-Way Catalyst Age Using Differential Lambda Signal Response. SAE Int. J. Engines 2017, 10, 1305–1312. [Google Scholar] [CrossRef]
- Trampert, S.; Nijs, M.; Huth, T.; Guse, D. Simulation von realen Fahrszenarien am Prüfstand. MTZ Extra 2017, 22, 12–19. [Google Scholar] [CrossRef]
- Gerstenberg, J.; Hartlief, H.; Tafel, S. Introducing a method to evaluate RDE demands at the engine test bench. In 16. Internationales Stuttgarter Symposium; Springer: Wiesbaden, Germany, 2016. [Google Scholar] [CrossRef]
- Xia, F. Echtzeitfähige eindimensionale Verbrennungsmotor-Prozesssimulation für X-in-the-Loop Anwendungen. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 2020. [Google Scholar]
- Böhmer, M. Simulation der Abgasemissionen von Hybridfahrzeugen für reale Fahrbedingungen. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 2017. [Google Scholar]
- Balazs, A.; Böhmer, M.; Baumgarten, H.; Scharf, J.; Thewes, M.; Uhlmann, T.; Yadla, S.K. Simulationsbasierte Entwicklungsmethode für zukünftige Abgasemissionsgesetzgebung. In 8. Emission Control 2016; Atzler, F., Ed.; Real Driving Emissions; Emission Control: Dresden, Germany, 2016; Contribution to a conference proceedings: Emission Control Conference 2016 Dresden. [Google Scholar]
- Balazs, A.; Böhmer, M.; Yadla, S.K.; Scharf, J.; Plum, T.; Eisenbarth, M.; Wegener, M.; Andert, J. Der Einfluss von vernetztem und autonomen Fahren auf den optimalen Ottomotorenantriebstrang. In 10. Emission Control 2019; Atzler, F., Ed.; Real Driving Emissions; Emission Control: Dresden, Germany, 2019; Contribution to a conference proceedings: Emission Control Conference 2019 Dresden. [Google Scholar]
- Baumgarten, H.; Scharf, J.; Thewes, M.; Uhlmann, T.; Balazs, A.; Böhmer, M. Simulationsbasierte Entwicklungsmethode für zukünftige Abgasemissionsgesetzgebung. In 37. Internationales Wiener Motorensymposium; Internationales Wiener Motorensymposium, Wien, 28–29 April 2016; Lenz, H.P., Geringer, B., Eds.; Springer Vieweg: Wiesbaden, Germany, 2016. [Google Scholar]
- Morcinkowski, B.; Adomeit, P.; Mally, M.; Esposito, S.; Walter, V.; Yadla, S.K. Emissionsvorhersage in der Entwicklung ottomotorischer EU7-Antriebe. In Experten-Forum Powertrain: Ladungswechsel und Emissionierung 2019: Moderne Antriebe—Emissionsarm, Elektrifiziert und Variabel; Liebl, J., Ed.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany; Springer Vieweg: Wiesbaden, Germany, 2020; ISBN 9783658287092. [Google Scholar]
- Brand, P.; Wang, Y.; Grizzle, J.W. Dynamic modeling of a three-way catalyst for SI engine exhaust emission control. IEEE Trans. Contr. Syst. Technol. 2000, 8, 767–776. [Google Scholar] [CrossRef]
- Fiengo, G.; Grizzle, J.W.; Cook, J.A.; Karnik, A.Y. Dual-UEGO active catalyst control for emissions reduction: Design and experimental validation. IEEE Trans. Contr. Syst. Technol. 2005, 13, 722–736. [Google Scholar] [CrossRef]
- Nebel, M. Entwicklung einer virtuellen Streckenbeschreibung einer Verbrennungskraftmaschine für Aufgaben der Applikation. Ph.D. Thesis, Technischen Universität Graz, Graz, Austria, 2010. [Google Scholar]
- Platner, S.; Kordon, M.; Fakiolas, E.; Atzler, H. Modellbasierte Serienkalibrierung—der effiziente Weg für Variantenentwicklung. MTZ—Mot. Z. 2013, 74, 754–761. [Google Scholar] [CrossRef]
- Görgen, M.; Nijs, M.; Thewes, M.; Balazs, A.; Yadla, S.K.; Scharf, J.; Uhlmann, T.; Claßen, J.; Dorscheidt, F.; Krysmon, S.; et al. Holistic Hybrid RDE Calibration Methodology for EU7. In 8. Internationalen Motorenkongress Baden Baden; Springer Fachmedien Wiesbaden: Baden-Baden, Germany, 2021. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Displacement | >1.5 L |
| Engine architecture | 4 cylinders in-line |
| Number of valves per cylinder | 4 |
| Boosting system | Twin-scroll turbo |
| Max. power | >160 kW @ 5500 min−1 |
| Max. torque | >280 Nm @ 2250 min−1 |
| Variable valve lift | Intake side |
| Variable valve timing | Intake and exhaust side |
| Number of bricks | 2 |
| Total TWC volume | 1.7 L |
| Position in the vehicle | Close-coupled |
| Ageing status | OK TWC: 2500 km (stabilized) nOK TWC: 160.000 km (borderline aged) |
| Vehicle | D-segment |
| Transmission | 8-speed AT |
| Wheel drive | FWD |
| Total vehicle weight including payload | >1500 kg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dorscheidt, F.; Pischinger, S.; Bailly, P.; Düzgün, M.T.; Krysmon, S.; Lisse, C.; Nijs, M.; Görgen, M. Transferability Assessment of OBD-Related Calibration and Validation Activities from the Vehicle to HiL Applications. Appl. Sci. 2024, 14, 1245. https://doi.org/10.3390/app14031245
Dorscheidt F, Pischinger S, Bailly P, Düzgün MT, Krysmon S, Lisse C, Nijs M, Görgen M. Transferability Assessment of OBD-Related Calibration and Validation Activities from the Vehicle to HiL Applications. Applied Sciences. 2024; 14(3):1245. https://doi.org/10.3390/app14031245
Chicago/Turabian StyleDorscheidt, Frank, Stefan Pischinger, Peter Bailly, Marc Timur Düzgün, Sascha Krysmon, Christoph Lisse, Martin Nijs, and Michael Görgen. 2024. "Transferability Assessment of OBD-Related Calibration and Validation Activities from the Vehicle to HiL Applications" Applied Sciences 14, no. 3: 1245. https://doi.org/10.3390/app14031245