
Recognition of Tunnel Fracture Zones in Seismic Waves and Ground-Penetrating Radar Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Characteristics of the Detected Signal in Fracture Zones
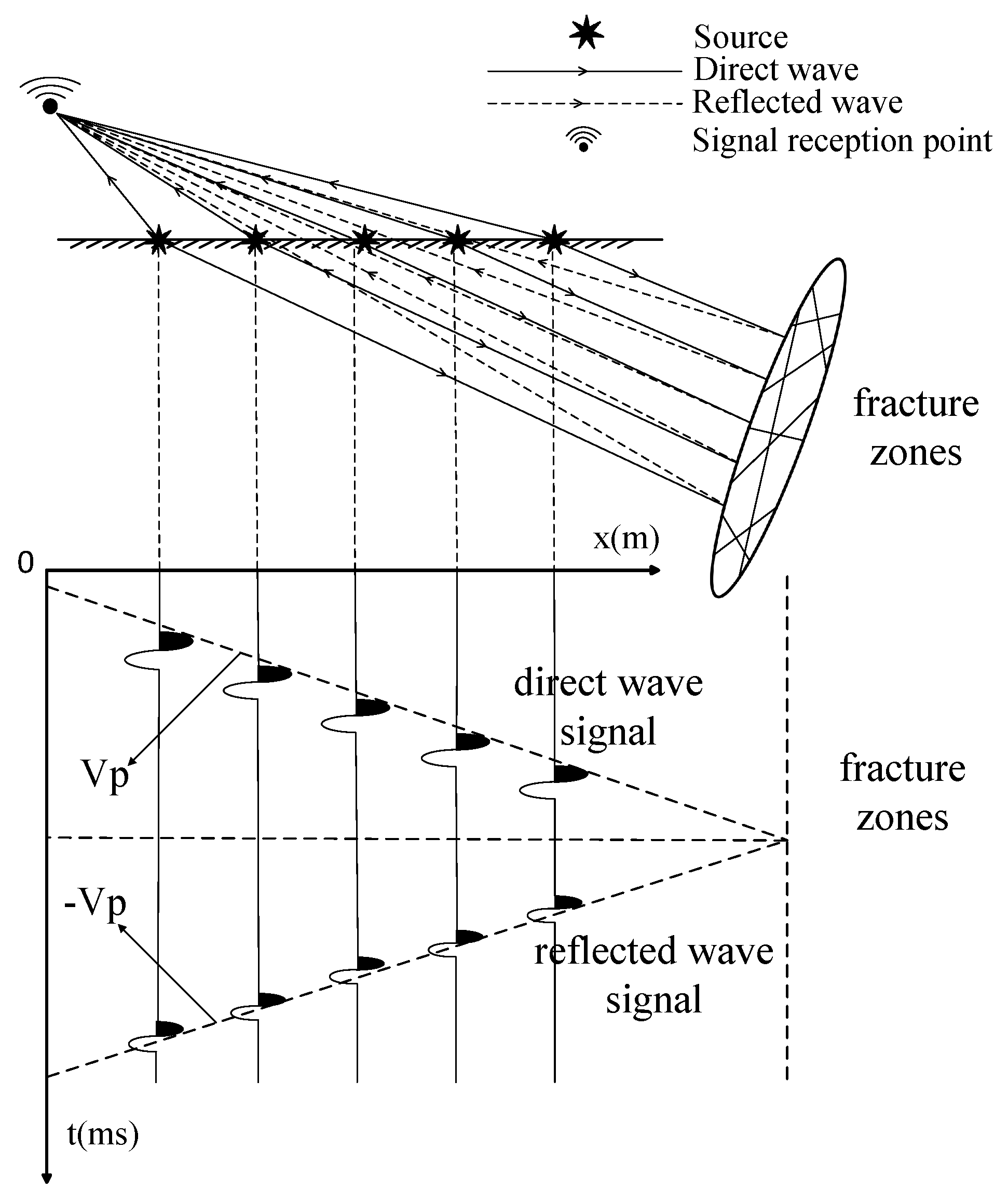
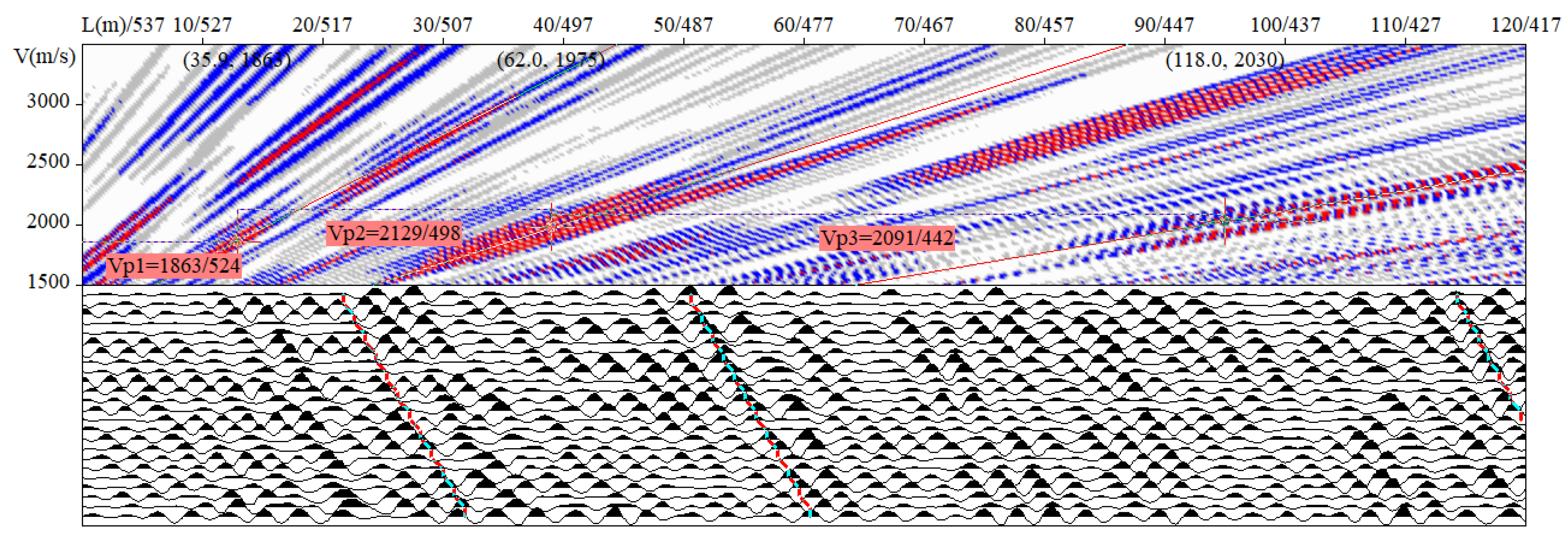
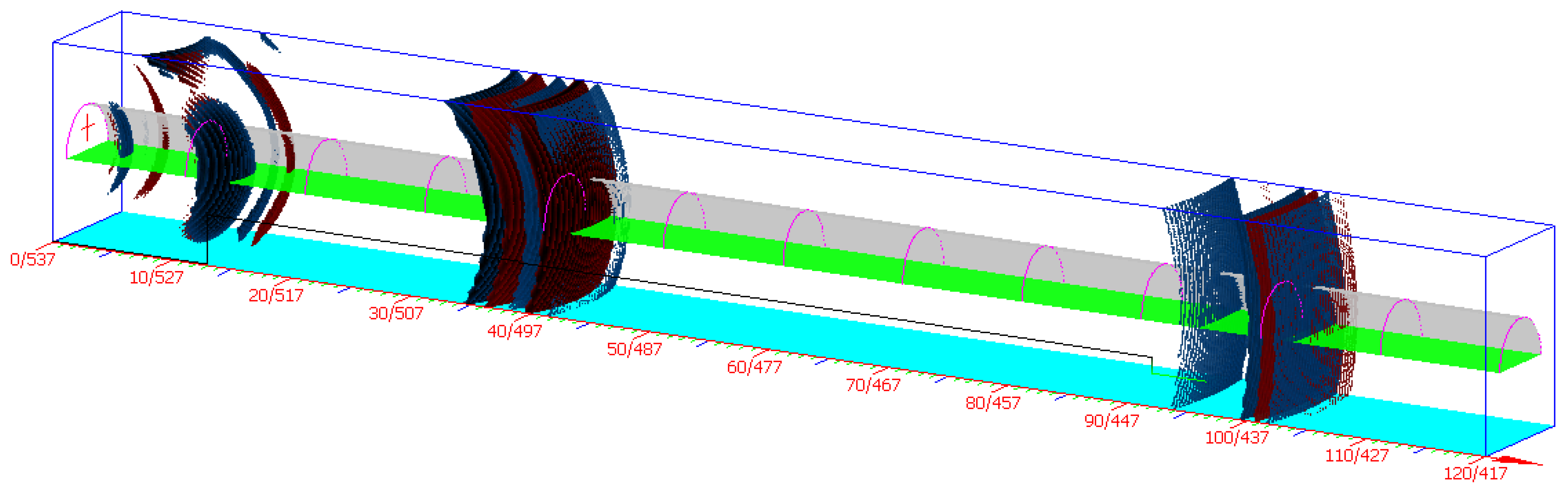
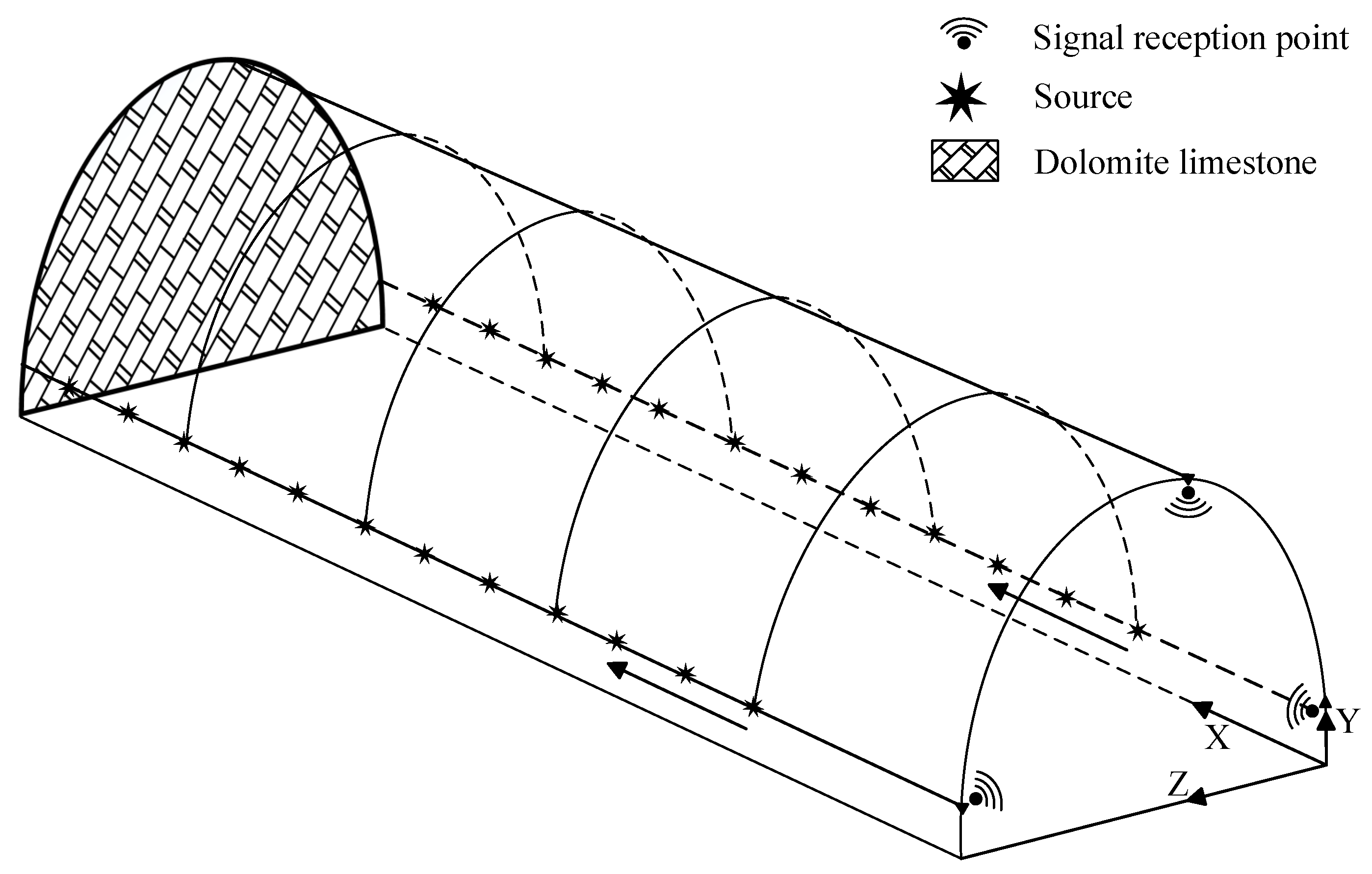
2.1. Characteristics of Seismic Wave Data in Fracture Zones
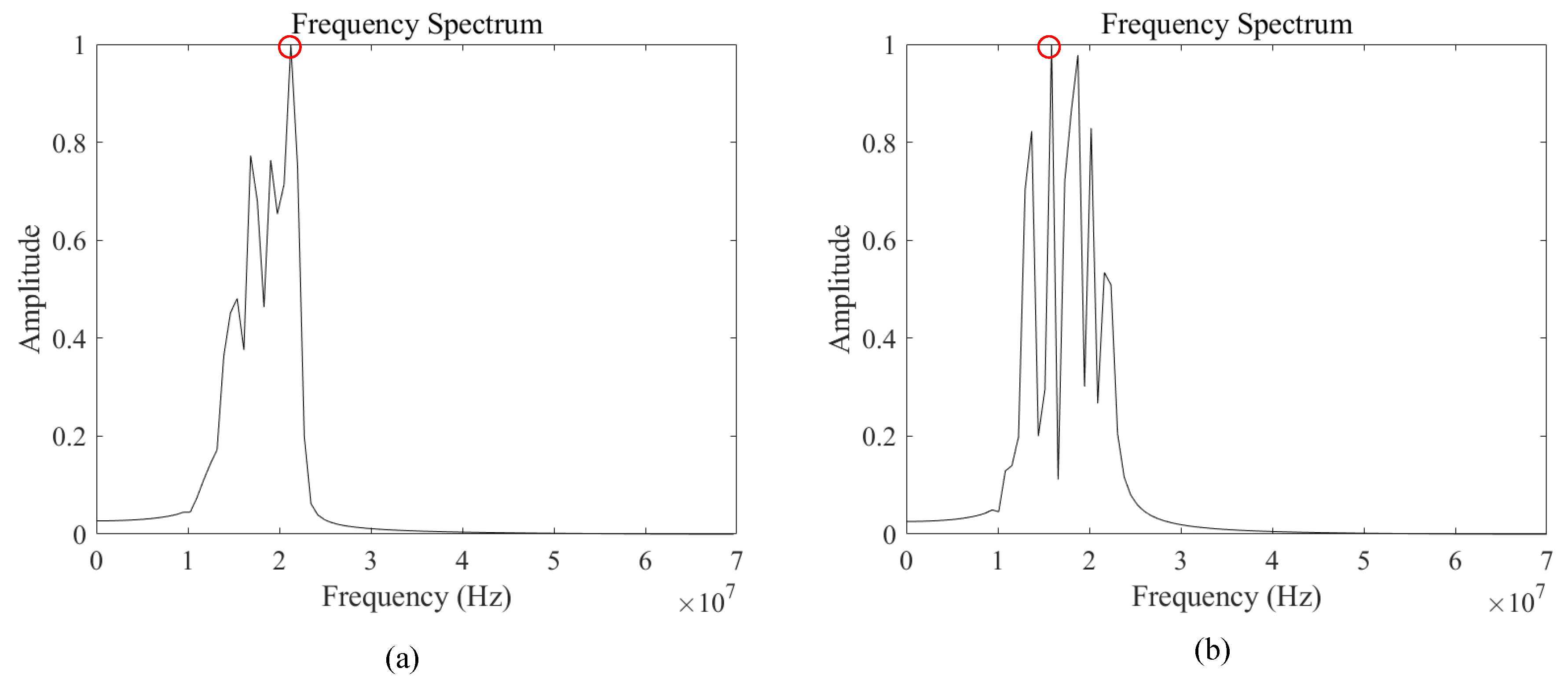
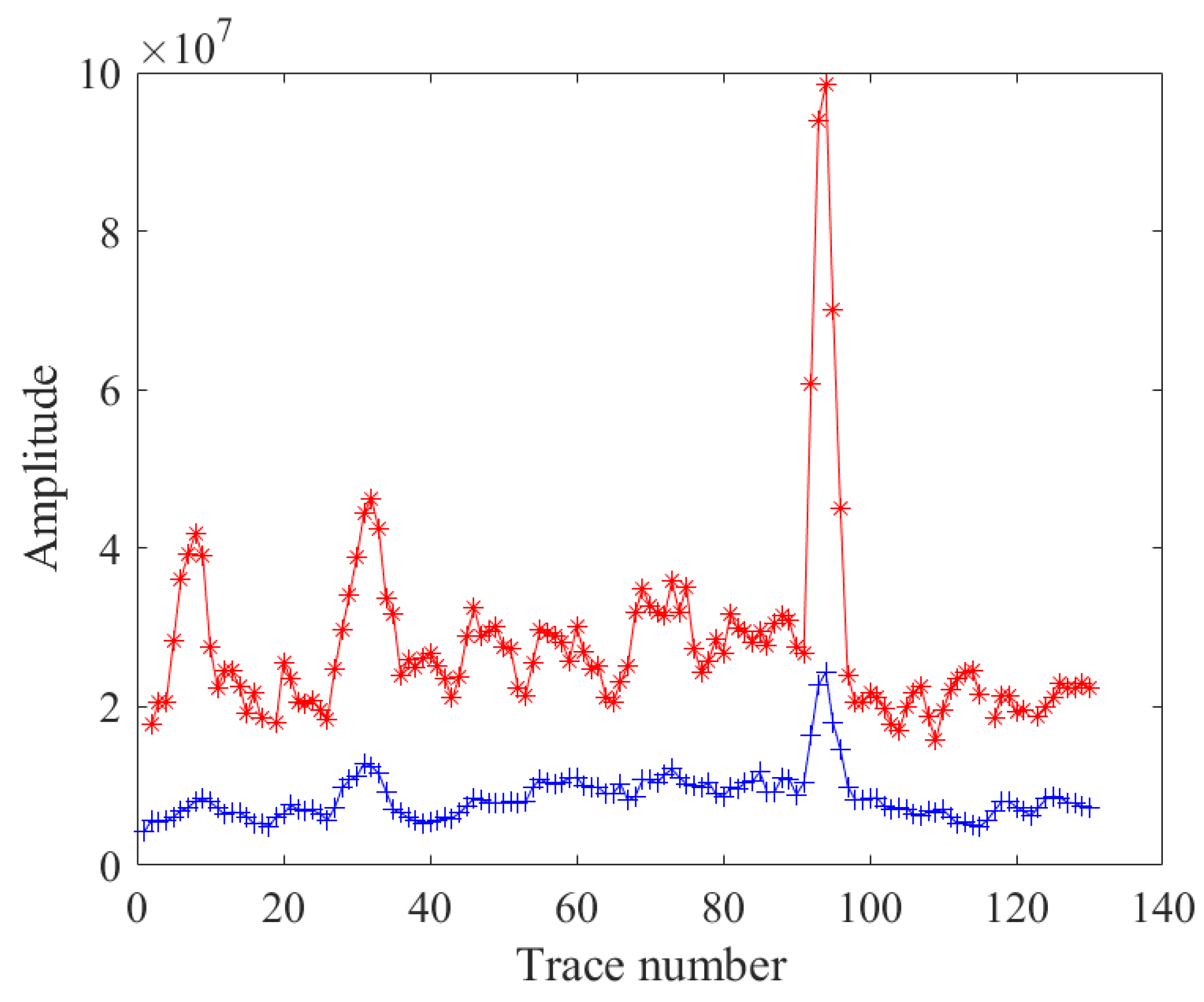
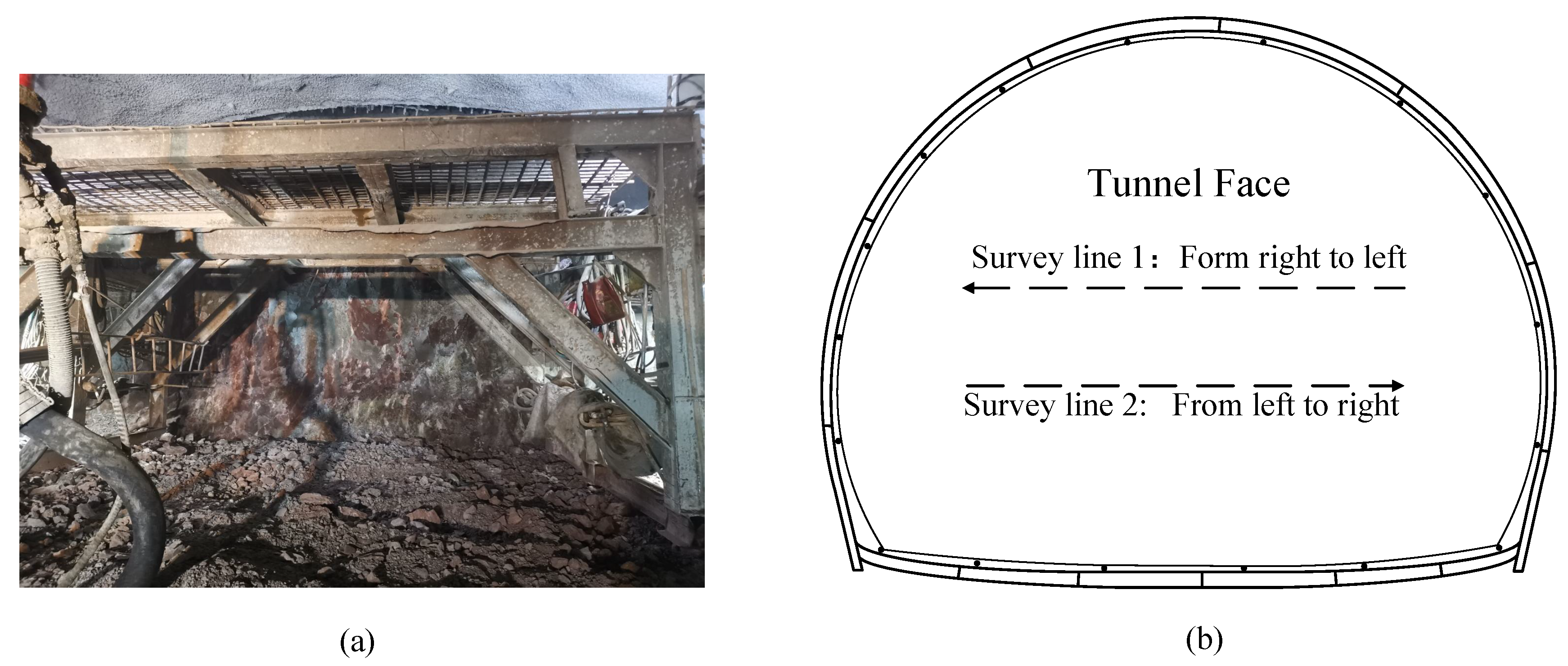
2.2. Characteristics of GPR Detection Data in Fracture Zones
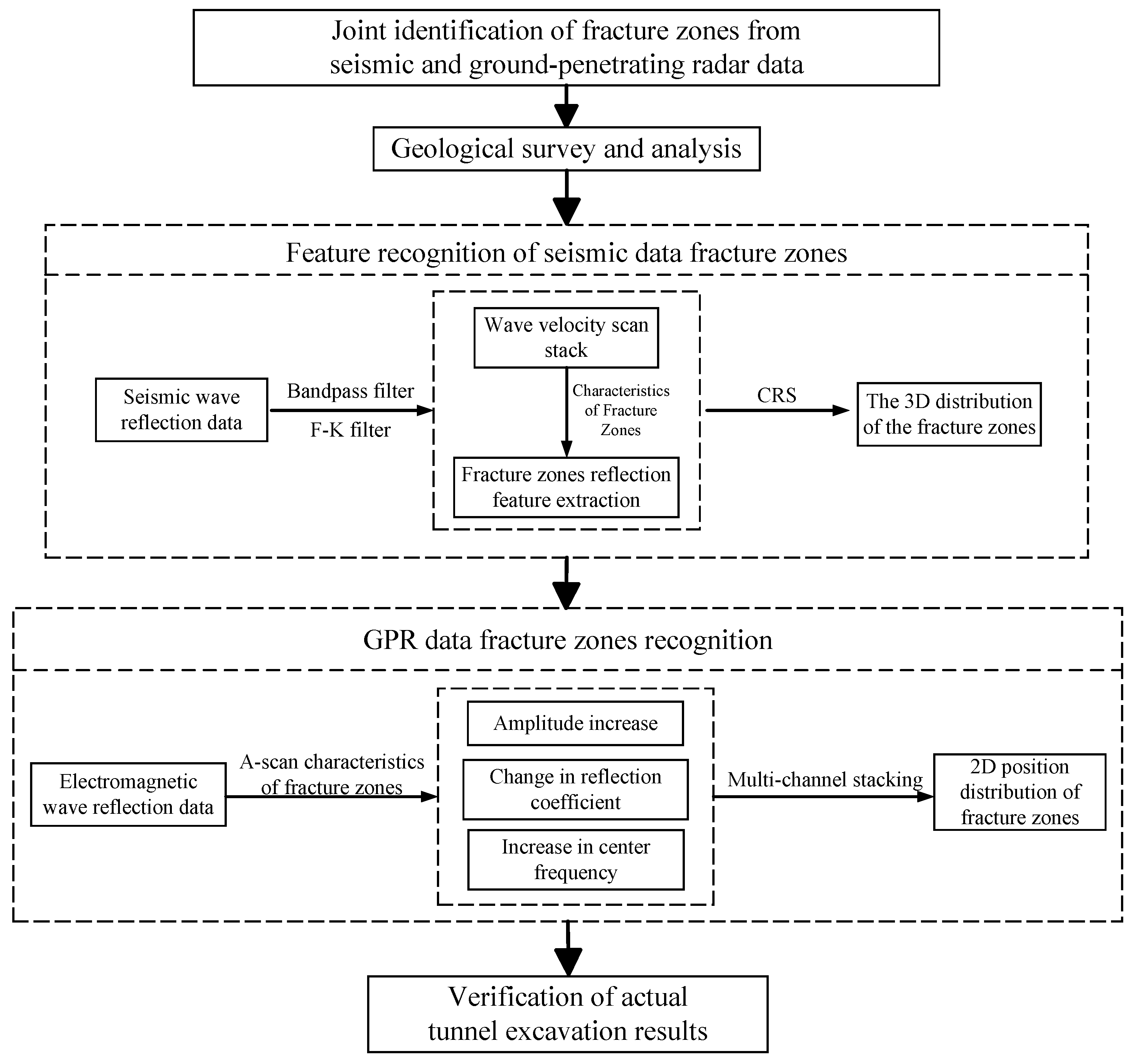
3. Recognition of Tunnel Fracture Zones
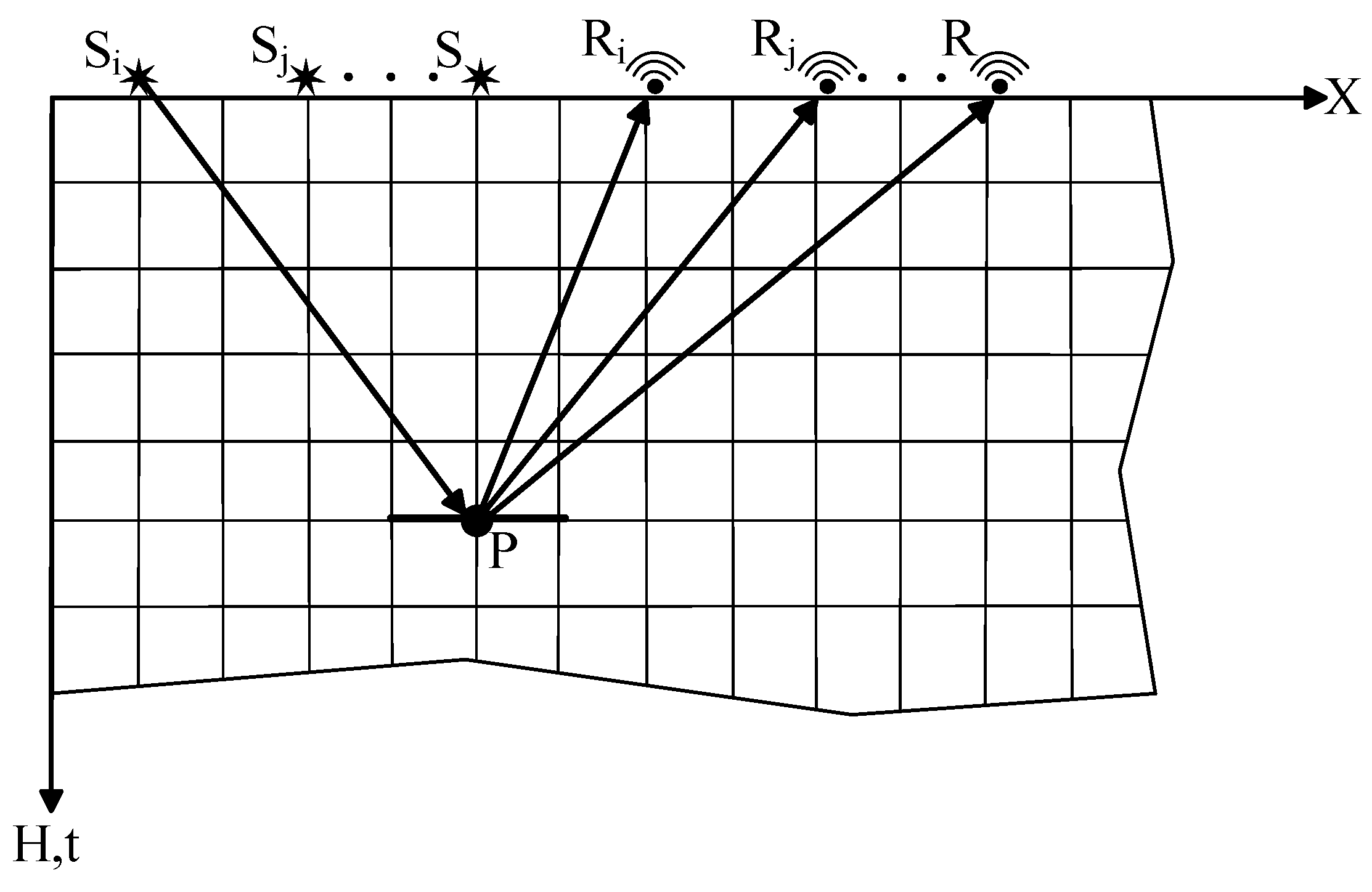
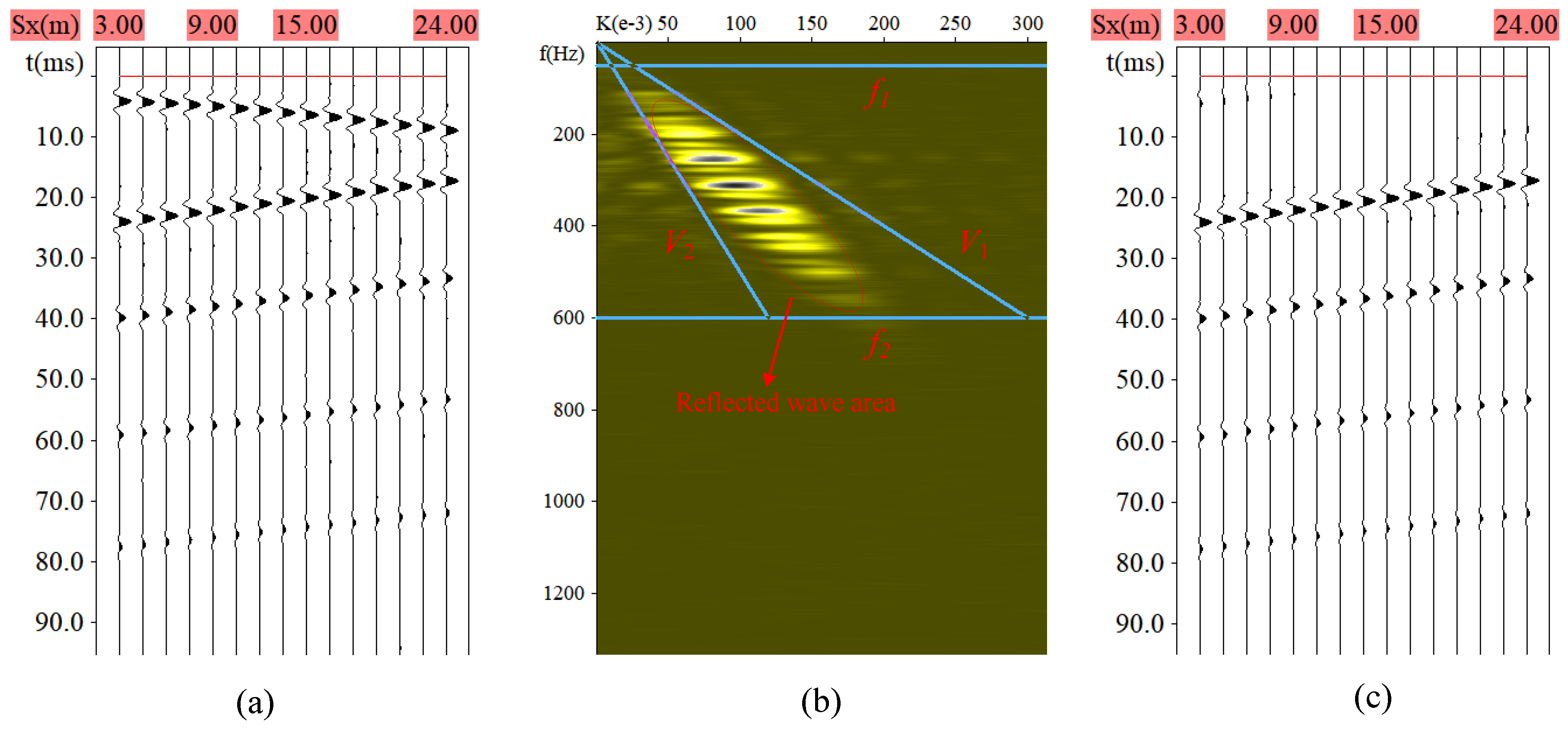
3.1. Recognition of Fracture Zones in Seismic Wave Data
3.2. Recognition of Fracture Zones in GPR Data
4. Advance Forecasting and Verification of Fracture Zones in Liangwangshan Tunnel
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sattel, G.; Sander, B.; Amberg, F.; Kashiwa, T. Predicting ahead of the Face. In Tunnels and Tunnelling International; Progressive Media Markets, Ltd.: London, UK, 1996. [Google Scholar]
- Otto, R.; Button, E.; Bretterebner, H.; Schwab, P. The application of TRT-true reflection tomography-at the Unterwald Tunnel. Felsbau 2002, 20, 51–56. [Google Scholar]
- Ashida, Y. Seismic imaging ahead of a tunnel face with three-component geophones. Int. J. Rock Mech. Min. Sci. 2001, 38, 823–831. [Google Scholar] [CrossRef]
- Zhao, Y.; Jiang, H.; Zhao, X. Tunnel seismic tomography method for geological prediction and its application. Appl. Geophys. 2006, 3, 69–74. [Google Scholar] [CrossRef]
- Lu, W.; Wu, J.; Li, S.; Xu, Z.; Zhou, L. Application study of the Tunnel Seismic Prediction method in Qiyueshan tunnel. In Proceedings of the 3rd International Conference on Material, Mechanical and Manufacturing Engineering, Guangzhou, China, 27–28 June 2015. [Google Scholar]
- Brodic, B.; Malehmir, A.; Juhlin, C. Delineating fracture zones using surface-tunnel-surface seismic data, P-S, and S-P mode conversions. J. Geophys. Res. Solid Earth. 2017, 122, 5493–5516. [Google Scholar] [CrossRef]
- Tzou, H.K.; Chu, T.S.; Liu, T.Y. Enhancing the safety management of NATM using the tunnel seismic prediction method: A case study. Innov. Infrastruct. Solut. 2020, 5, 106. [Google Scholar] [CrossRef]
- Wang, J.; Yang, S.; Xu, X.; Jiang, P.; Ren, Y.; Du, C.; Du, S. 3C-3D tunnel seismic reverse time migration imaging: A case study of Pearl River Delta Water Resources Allocation Project. J. Appl. Geophys. 2023, 210, 104954. [Google Scholar] [CrossRef]
- Shi, S.S.; Li, S.C.; Li, L.P.; Zhou, Z.Q.; Wang, J. Advance optimized classification and application of surrounding rock based on fuzzy analytic hierarchy process and Tunnel Seismic Prediction. Autom. Constr. 2014, 37, 217–222. [Google Scholar] [CrossRef]
- Jol, H.M. Ground Penetrating Radar: Theory and Applications; Elsevier: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Mierczak, M.; Karczewski, J. Location of agate geodes in Permian deposits of Simota gully using the GPR. Acta Geophys. 2021, 69, 655–664. [Google Scholar] [CrossRef]
- Puntu, J.M.; Chang, P.Y.; Lin, D.J.; Amania, H.H.; Doyoro, Y.G. A Comprehensive Evaluation for the Tunnel Conditions with Ground Penetrating Radar Measurements. Remote. Sens. 2021, 13, 4250. [Google Scholar] [CrossRef]
- Heikkinen, E.; Kantia, P. Suitability of Ground Penetrating Radar for Locating Large Fractures; POSIVA: Eurajoki, Finland, 2011. [Google Scholar]
- Li, C.; Li, M.J.; Zhao, Y.G.; Liu, H.H.; Wan, Z.; Xu, J.; Xu, X.P.; Chen, Y.; Wang, B. Layer recognition and thickness evaluation of tunnel lining based on ground penetrating radar measurements. J. Appl. Geophys. 2011, 73, 45–48. [Google Scholar] [CrossRef]
- Chen, H.; Liu, S. Advanced geological prediction technology of tunnel based on image recognition. Arab. J. Geosci. 2019, 12, 601. [Google Scholar] [CrossRef]
- Sengani, F. The use of ground Penetrating Radar to distinguish between seismic and non-seismic hazards in hard rock mining. Tunn. Undergr. Space Technol. 2020, 103, 103470. [Google Scholar] [CrossRef]
- Molron, J.; Linde, N.; Baron, L.; Selroos, J.; Darcel, C.; Davy, P. Which fractures are imaged with Ground Penetrating Radar? Results from an experiment in the Äspö Hardrock Laboratory, Sweden. Eng. Geol. 2020, 273, 105674. [Google Scholar] [CrossRef]
- Li, C.; Zhang, Y.; Wang, L.; Zhang, W.; Yang, X.; Yang, X. Recognition of Rebar in Ground-Penetrating Radar Data for the Second Lining of a Tunnel. Appl. Sci. 2023, 13, 3203. [Google Scholar] [CrossRef]
- Li, C.; Li, M.; Yang, X.; Zhang, W.; Fan, M.; Yang, X.; Wang, L. Boundary recognition of tunnel lining void from ground penetrating radar data. J. Geophys. Eng. 2023, 20, 723–734. [Google Scholar] [CrossRef]
- Wang, C.; Bai, M.; Du, Y.; Kuang, X. Application Analysis of Comprehensive Advanced Geological Prediction in Karst Tunnel. Appl. Mech. Mater. 2013, 405–408, 1309–1313. [Google Scholar] [CrossRef]
- Li, S.; Zhou, Z.Q.; Ye, Z.; Li, L.P.; Qi, Z.; Xu, Z. Comprehensive geophysical prediction and treatment measures of karst caves in deep buried tunnel. J. Appl. Geophys. 2015, 116, 247–257. [Google Scholar] [CrossRef]
- Chen, L.; Wang, H.; Xu, X.; Zhang, Y.; Wang, C.; Song, J.; Han, L. Geological Exploration Using Integrated Geophysical Methods in Tunnel: A Case. Geotech. Geol. Eng. 2019, 38, 1111–1119. [Google Scholar] [CrossRef]
- Xue, G.Q.; Yan, Y.J.; Li, X.; Di, Q.Y. Transient electromagnetic S-inversion in tunnel prediction. Geophys. Res. Lett. 2008, 34. [Google Scholar] [CrossRef]
- Liu, H.; Yu, Z.; Zhang, H. Application of comprehensive advanced geological prediction technology in Da-puling tunnel. E3S Web Conf. 2021, 283, 1013. [Google Scholar] [CrossRef]
- Liu, M.; Gan, Q. Applied research of comprehensive advance geological prediction in Daluoshan water diversion tunnel. Sci. Rep. 2023, 13, 9162. [Google Scholar] [CrossRef] [PubMed]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Wang, H.; Wang, Y.; Wang, L.; Yang, X.; Wan, X. Recognition of Tunnel Fracture Zones in Seismic Waves and Ground-Penetrating Radar Data. Appl. Sci. 2024, 14, 1282. https://doi.org/10.3390/app14031282
Li C, Wang H, Wang Y, Wang L, Yang X, Wan X. Recognition of Tunnel Fracture Zones in Seismic Waves and Ground-Penetrating Radar Data. Applied Sciences. 2024; 14(3):1282. https://doi.org/10.3390/app14031282
Chicago/Turabian StyleLi, Chuan, Haichun Wang, Yunsheng Wang, Lulu Wang, Xi Yang, and Xiaorong Wan. 2024. "Recognition of Tunnel Fracture Zones in Seismic Waves and Ground-Penetrating Radar Data" Applied Sciences 14, no. 3: 1282. https://doi.org/10.3390/app14031282