
A Clutter Identification and Removal Method Based on Long Delay Lines and Cross-Correlation in Through-Wall Detection

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theory
2.1. Impact of Periodic Nonlinearity on the FMCW Radar
2.2. Impact of Phase-Locked Loop Spuriousness on the FMCW Radar
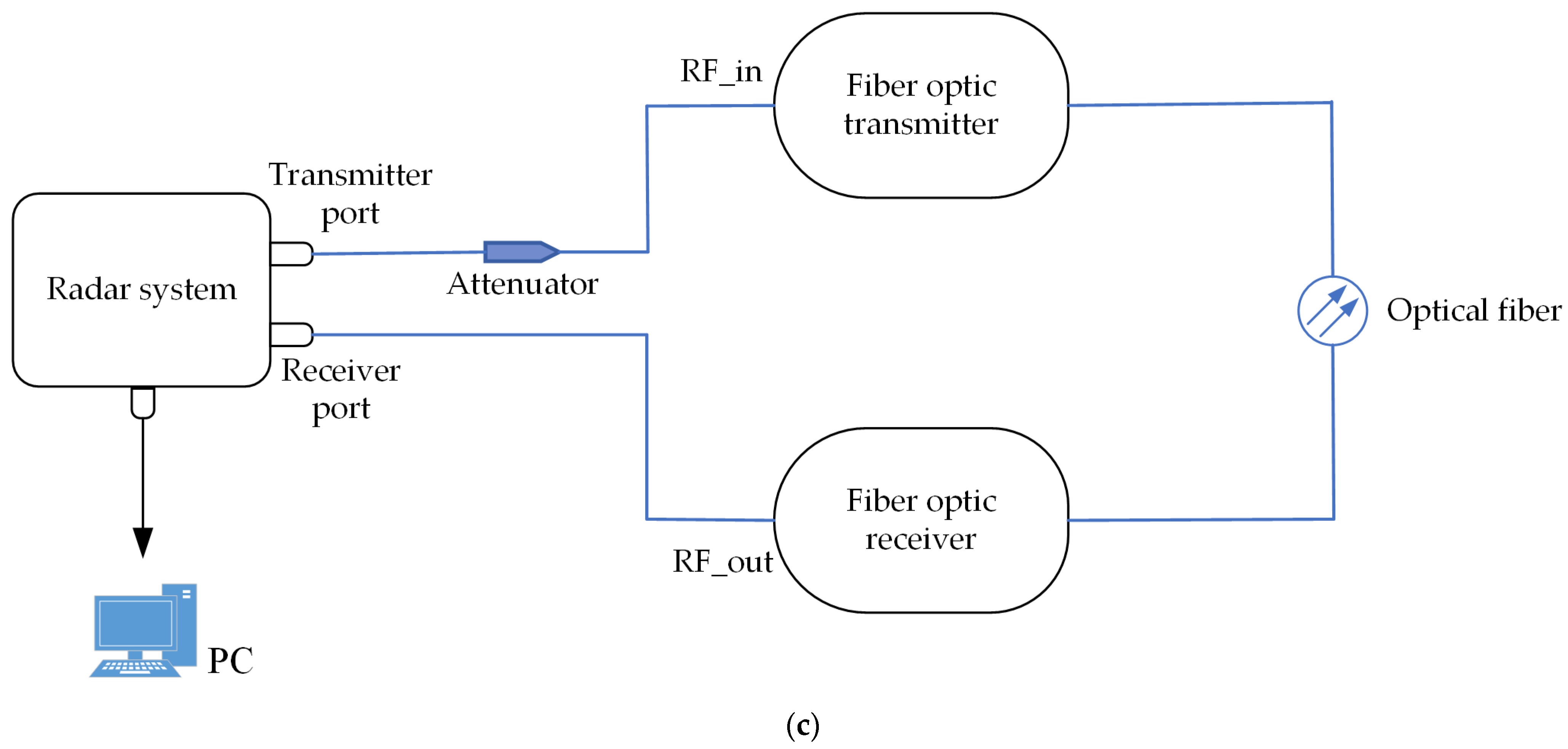
3. Experiments with Optical Fibers
- Signal pre-processing includes Hilbert transform and direct current signal removal operation on each piece of data;
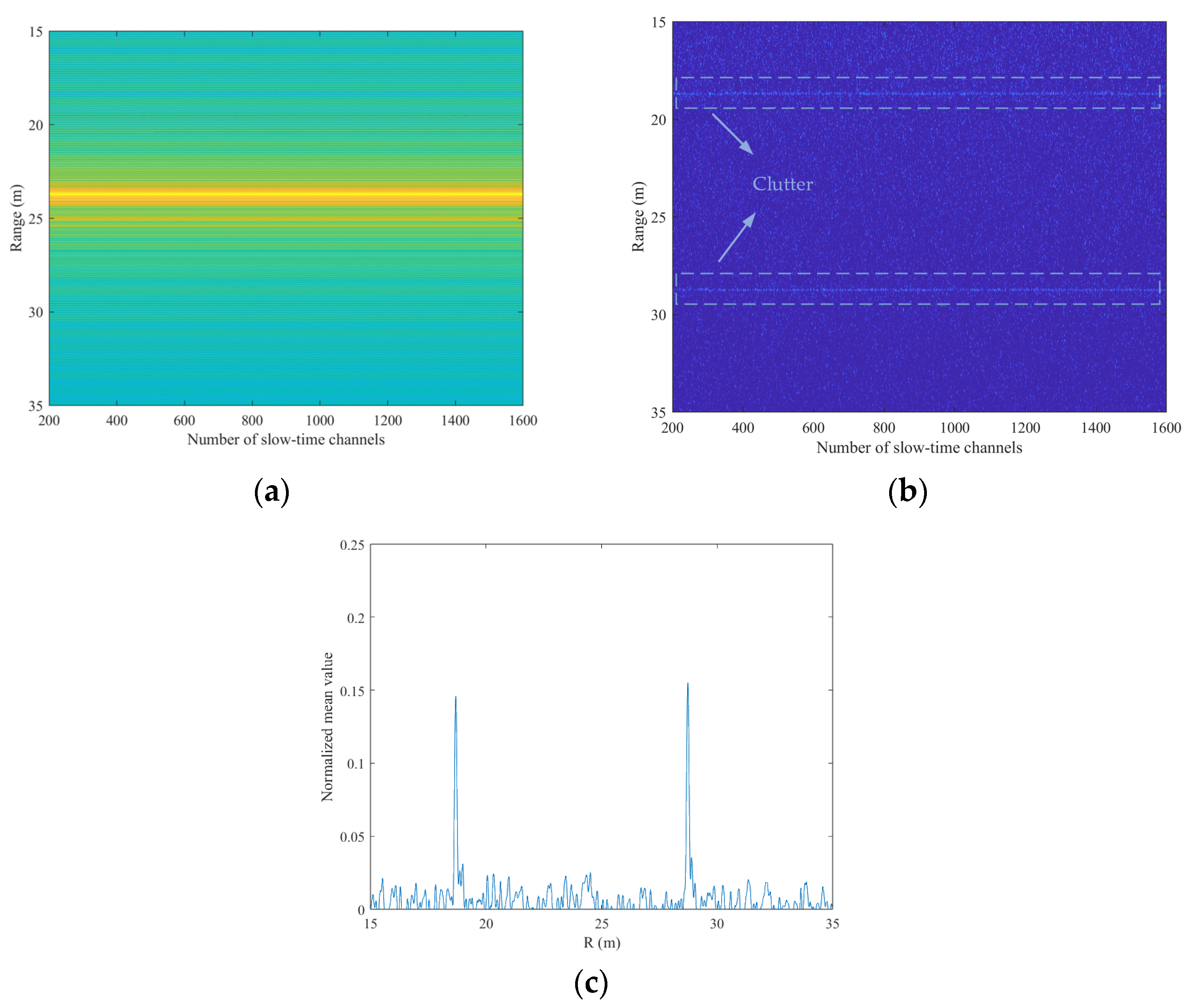
- FFT is performed along range direction to obtain the range-slow time spectrum. This step is still included for every piece of data. Each piece of data is arranged into a matrix by column as the range-slow time spectrum. Figure 6a shows the range-slow time spectrum plot of a fiber with a length of 24 m. The maximum position of each column of data corresponds to the distance of 24 m;
- Two adjacent columns of the range-slow spectrum along the slow time direction are subtracted. The information of the clutter is highlighted due to its own instability. The energy of the main lobe is canceled out due to its stability. The processed result of the fiber with a length of 24 m is shown in Figure 6b where only clutter remains.
4. Clutter Suppression Method
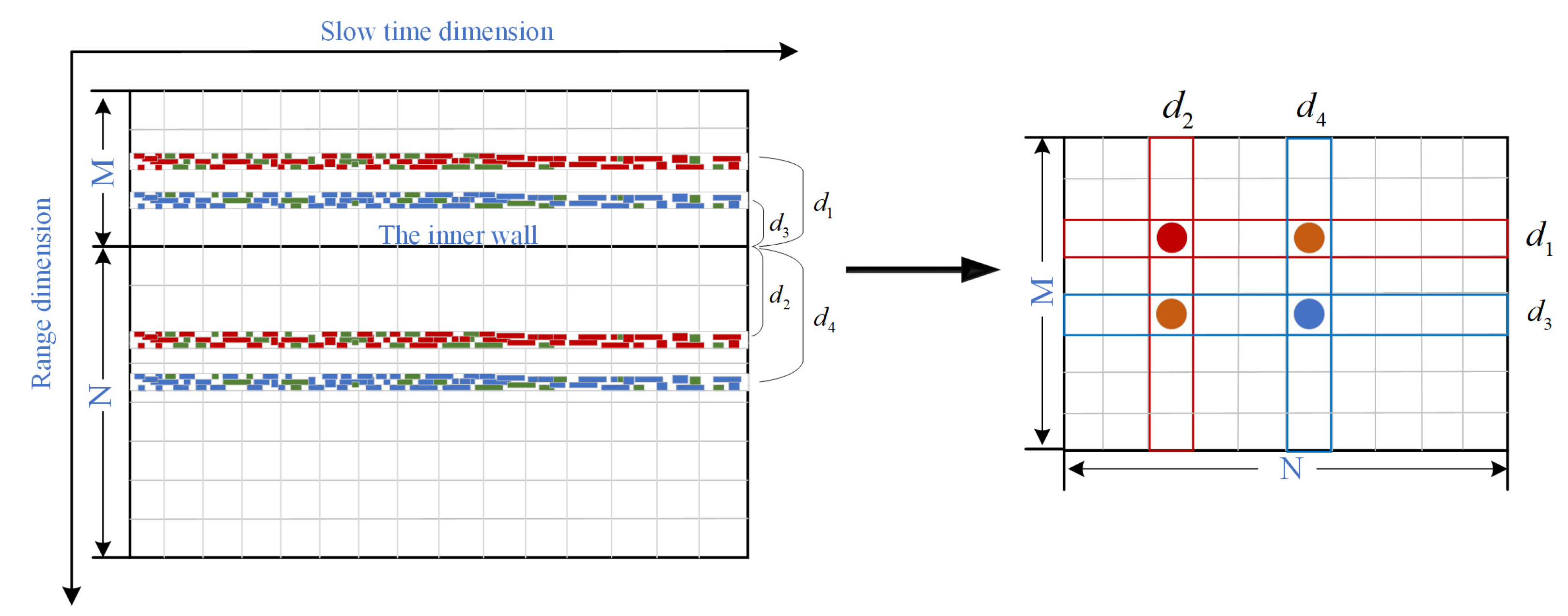
4.1. Identification of Clutter Position
- The use of long delay lines.
- The cross-correlation of signal.
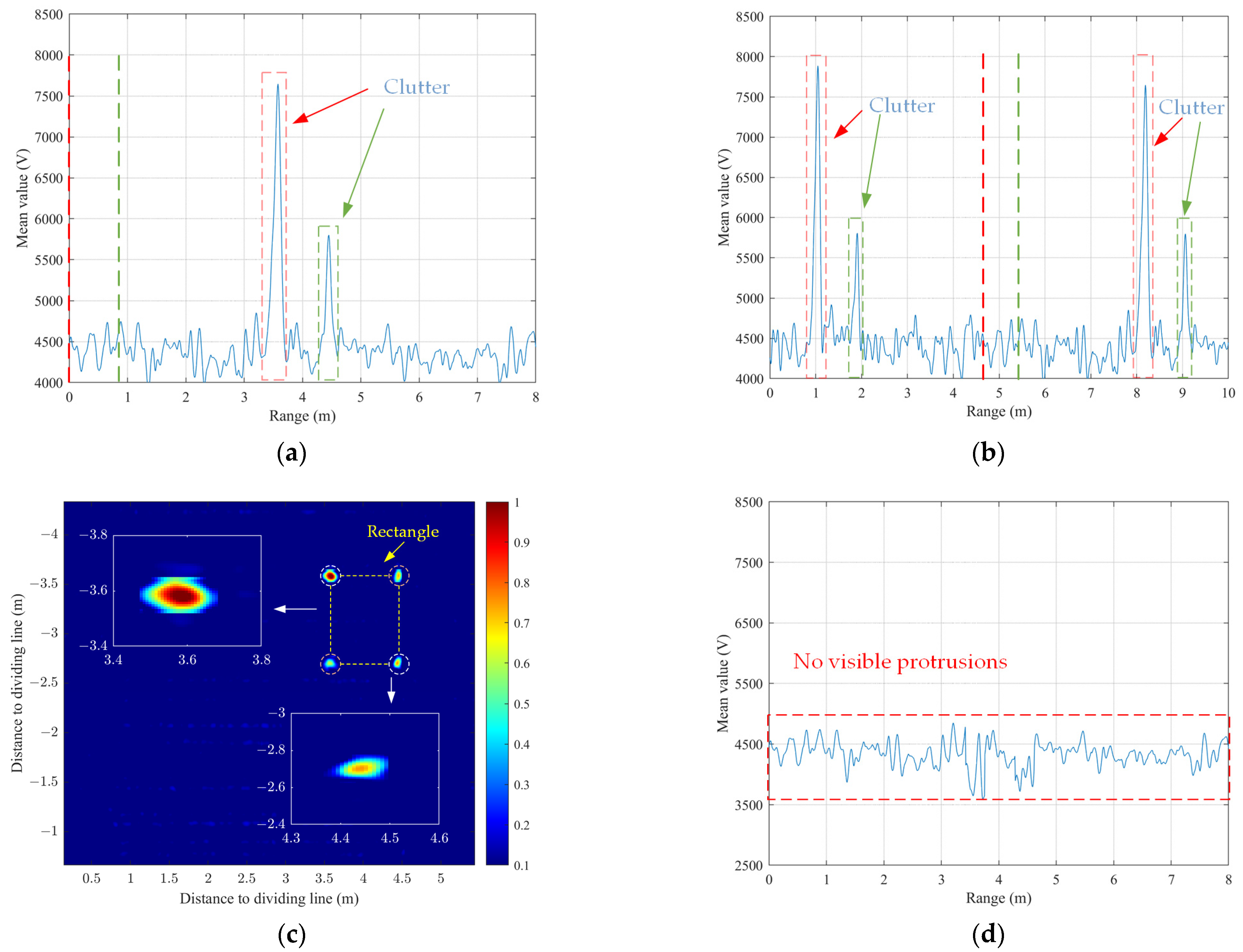
4.2. Clutter Removal
5. Experimental Data
5.1. Free Space Detection
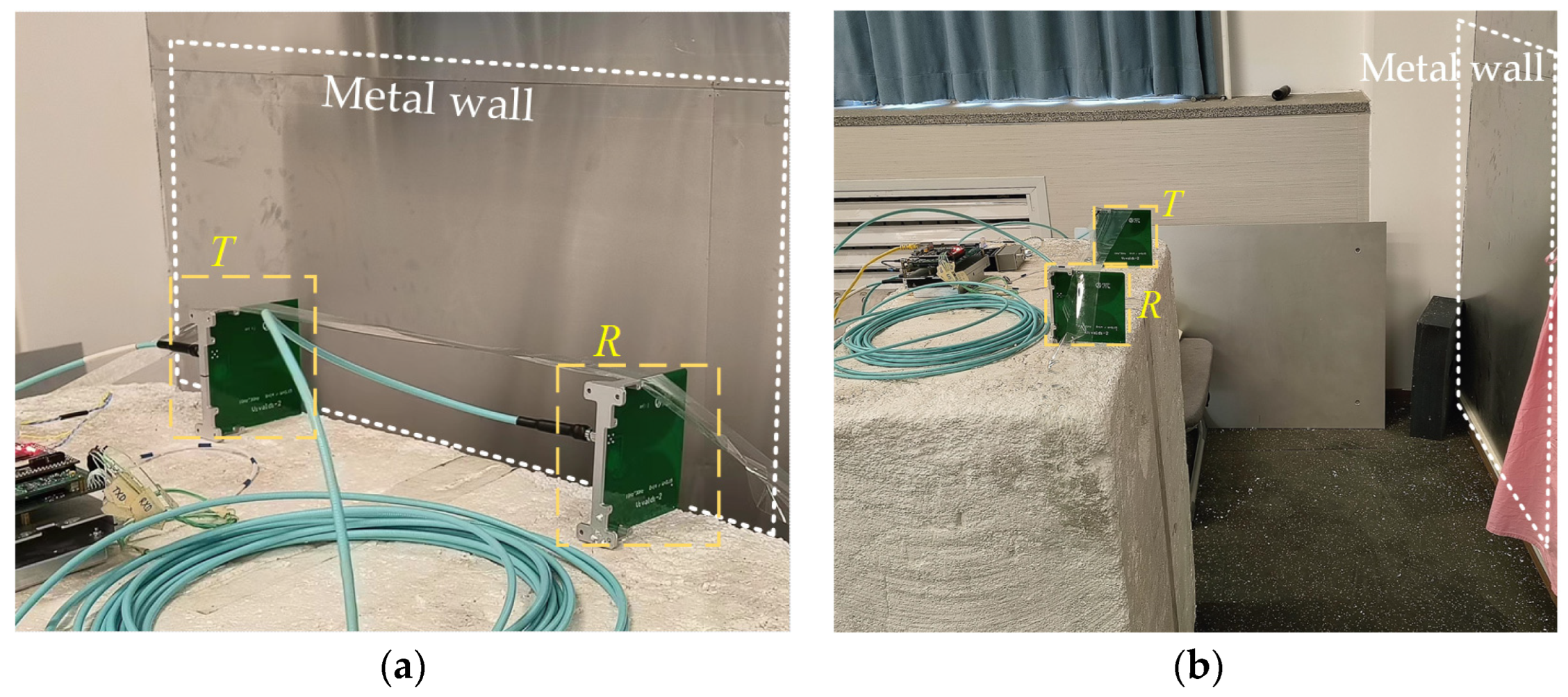
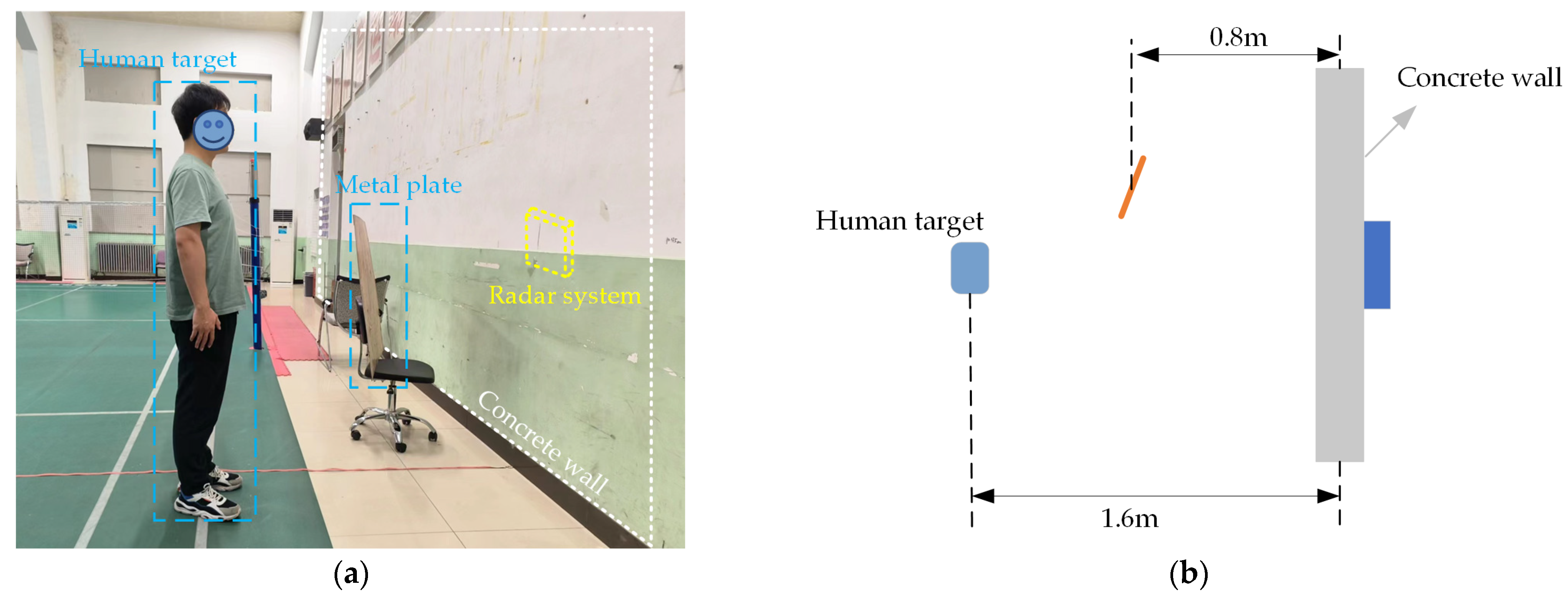
5.2. Through-Wall Detection
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pisa, S.; Pittella, E. A survey of radar systems for medical applications. IEEE Aerosp. Electron. Syst. 2016, 31, 64–81. [Google Scholar] [CrossRef]
- Regev, N.; Wulich, D. Remote sensing of vital signs using an ultrawide-band radar. Int. J. Remote Sens. 2019, 40, 6596–6606. [Google Scholar] [CrossRef]
- Gu, C.; Li, C. Assessment of human respiration patterns via noncontact sensing using Doppler multi-radar system. Sensors 2015, 15, 6383–6398. [Google Scholar] [CrossRef] [PubMed]
- Pramudita, A.A.; Suratman, F.Y. Low-power radar system for noncontact human respiration sensor. IEEE Trans. Instrum. Meas. 2021, 70, 1–15. [Google Scholar] [CrossRef]
- Seng, C.H.; Bouzerdoum, A. Two-stage fuzzy fusion with applications to through-the-wall radar imaging. IEEE Geosci. Remote Sens. Lett. 2013, 10, 687–691. [Google Scholar] [CrossRef]
- Becquaert, M.; Cristofani, E. Online sequential compressed sensing with multiple information for through-the-wall radar imaging. IEEE Sens. 2019, 19, 4138–4148. [Google Scholar] [CrossRef]
- Zhang, D.; Kurata, M. FMCW radar for small displacement detection of vital signal using projection matrix method. Int. J. Antennas. Propag. 2013, 2013, 571986. [Google Scholar] [CrossRef]
- Wang, S.; Pohl, A. A novel ultra-wideband 80 GHz FMCW radar system for contactless monitoring of vital signs. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015. [Google Scholar] [CrossRef]
- Pramudita, A.A.; Suratman, F. Modified FMCW system for non-contact sensing of human respiration. J. Med. Eng. Technol. 2020, 44, 114–124. [Google Scholar] [CrossRef] [PubMed]
- Beasley, P.D.L.; Stove, A.G. Solving the problems of a single antenna frequency modulated CW radar. In Proceedings of the IEEE International Conference on Radar, Arlington, VA, USA, 7–10 May 1990. [Google Scholar] [CrossRef]
- Ayhan, S.; Scherr, S.A. Impact of Frequency Ramp Nonlinearity, Phase Noise, and SNR on FMCW Radar Accuracy. IEEE Trans. Microw. Theory Technol. 2016, 64, 3290–3301. [Google Scholar] [CrossRef]
- Park, H.G.; Kim, B. VCO nonlinearity correction scheme for a wideband FMCW radar. Microw. Opt. Technol. Lett. 2000, 25, 266–269. [Google Scholar] [CrossRef]
- Mizutani, H.; Tsuru, M. A millimeter-wave highly linear VCO MMIC with compact tuning voltage converter. In Proceedings of the 2006 European Microwave Conference, Manchester, UK, 10–15 September 2006. [Google Scholar] [CrossRef]
- Gomez-Garcia, D.; Leuschen, C. Linear chirp generator based on direct digital synthesis and frequency multiplication for airborne FMCW snow probing radar. In Proceedings of the 2014 IEEE MTT-S International Microwave Symposium, Tampa, FL, USA, 1–6 July 2014. [Google Scholar] [CrossRef]
- Frischen, A.; Hasch, J. FMCW ramp non-linearity effects and measurement technique for cooperative radar. In Proceedings of the 2015 European Radar Conference, Paris, France, 9–11 September 2015. [Google Scholar] [CrossRef]
- Meta, A.; Hoogeboom, P. Signal processing for FMCW SAR. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3519–3532. [Google Scholar] [CrossRef]
- Yang, J.; Liu, C. Nonlinearity correction of FMCW SAR based on homomorphic deconvolution. IEEE Geosci. Remote Sens. Lett. 2013, 10, 991–995. [Google Scholar] [CrossRef]
- Anghel, A.; Vasile, G.R. Short-range wideband FMCW radar for millimetric displacement measurements. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5633–5642. [Google Scholar] [CrossRef]
- Wang, R.; Xiang, M. Nonlinear Phase Estimation and Compensation for FMCW Ladar Based on Synchrosqueezing Wavelet Transform. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1174–1178. [Google Scholar] [CrossRef]
- Jin, K.; Lai, T. A method for nonlinearity correction of wideband FMCW radar. In Proceedings of the 2016 CIE International Conference on Radar, Guangzhou, China, 10–13 October 2016. [Google Scholar] [CrossRef]
- Levantino, S.; Marzin, G. A Wideband Fractional-N PLL with Suppressed Charge-Pump Noise and Automatic Loop Filter Calibration. IEEE J. Solid-State Circuits 2013, 48, 2419–2429. [Google Scholar] [CrossRef]
- Ferriss, M.; Plouchart, J.O. An Integral Path Self-Calibration Scheme for a Dual-Loop PLL. IEEE J. Solid-State Circuits 2013, 48, 996–1008. [Google Scholar] [CrossRef]
- Xue, J.H.; Titterington, D.M. T-Tests, F-Tests and Otsu’s Methods for Image Thresholding. IEEE Trans. Image Process. 2011, 20, 2392–2396. [Google Scholar] [CrossRef] [PubMed]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, Y.; Ji, Y.; Ye, S.; Liu, X.; Fang, G. A Clutter Identification and Removal Method Based on Long Delay Lines and Cross-Correlation in Through-Wall Detection. Appl. Sci. 2024, 14, 1299. https://doi.org/10.3390/app14031299
Yuan Y, Ji Y, Ye S, Liu X, Fang G. A Clutter Identification and Removal Method Based on Long Delay Lines and Cross-Correlation in Through-Wall Detection. Applied Sciences. 2024; 14(3):1299. https://doi.org/10.3390/app14031299
Chicago/Turabian StyleYuan, Yubing, Yicai Ji, Shengbo Ye, Xiaojun Liu, and Guangyou Fang. 2024. "A Clutter Identification and Removal Method Based on Long Delay Lines and Cross-Correlation in Through-Wall Detection" Applied Sciences 14, no. 3: 1299. https://doi.org/10.3390/app14031299