
Research on the Safety Evaluation Method for Quayside Container Cranes Based on the Best–Worst Method–Pythagorean Fuzzy VIKOR Approach

Abstract
:1. Introduction
2. Methodology
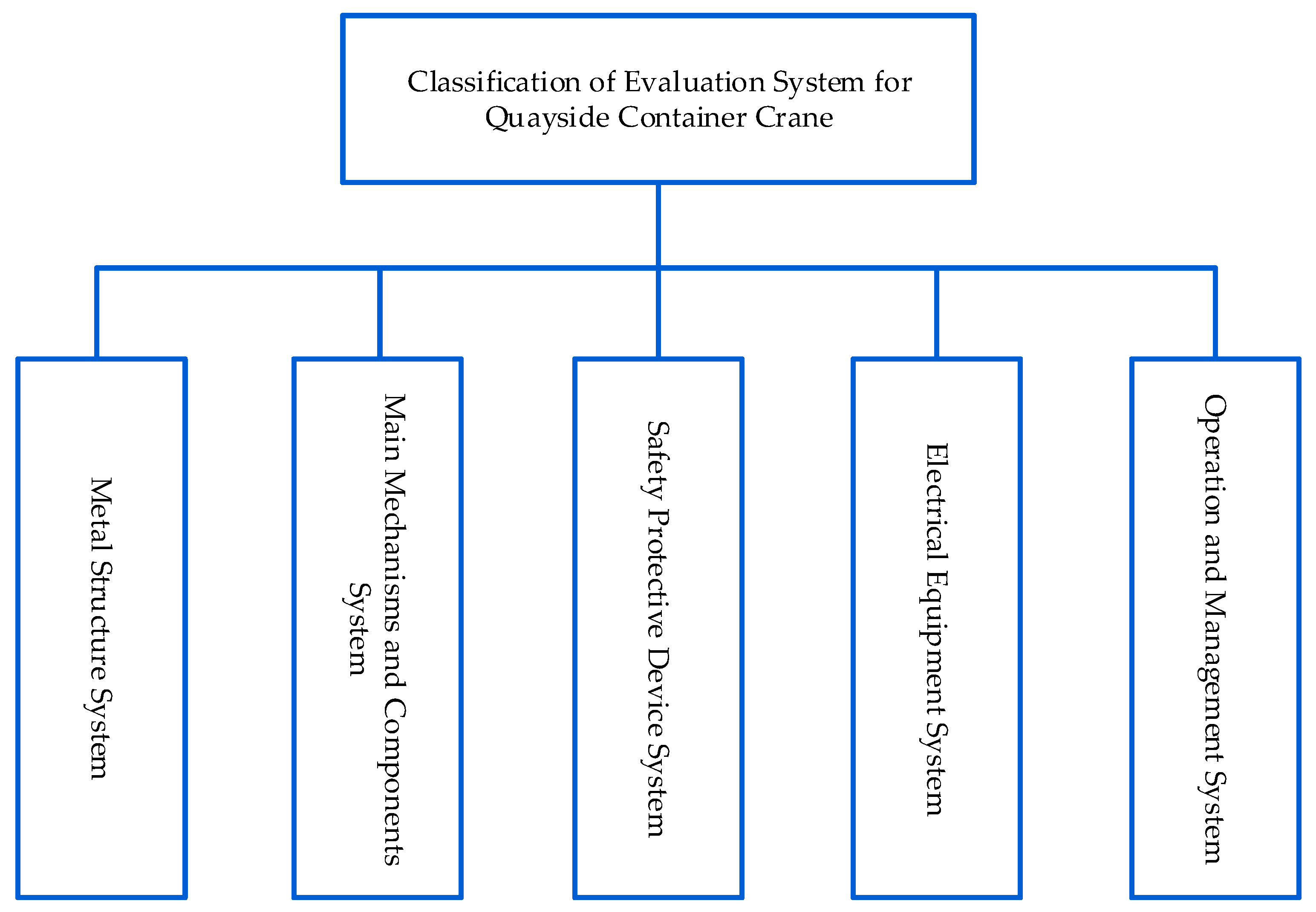
2.1. Quayside Container Crane Safety Evaluation Index System
2.2. The Best–Worst Method (BWM)
2.2.1. Overview of the BWM
2.2.2. BWM Calculation Process
- 1.
- Determination of the Best and Worst Criteria;
- 2.
- Calculation of the Comparison Vector; ;
- 3.
- Calculation of the Comparison Vector .
- 4.
- Calculation of the Optimal Criterion Weights
2.3. Pythagorean Hesitant Fuzzy VIKOR Method
2.3.1. Overview of Pythagorean Hesitant Fuzzy Sets
- If , then ;
- If , thenIf , then ;If , then .
- ;
- ;
- ;
- .
2.3.2. The Basic Principle of the VIKOR Method
- 1.
- Data Normalization
- 2.
- Determining the Ideal and Anti-ideal Solutions
- 3.
- Calculating the Distance Ratios to the Ideal and Anti -Ideal Solutions
- 4.
- Calculating the Compromise Value
- 5.
- Ranking of Alternatives
- 6.
- Acquiring the Optimal Solution
- (a)
- If Condition 1 is not met, the compromise solution includes both , , , where the value of m is determined by Equation (25):
- (b)
- If only Condition 2 is not satisfied, then both the alternatives and (the ones with the smallest and the second smallest values, respectively) are considered as optimal solutions. In this case, both and are the compromise solutions.
2.3.3. The Basic Idea of the Pythagorean Hesitant Fuzzy VIKOR Method
- 1.
- Construct the Expert Decision Fuzzy Matrix
- 2.
- Determine the Weights of Each Evaluation Criterion
- 3.
- Determine the Pythagorean Hesitant Fuzzy Ideal Solution and Anti-Ideal Solution
- 4.
- Determine the Individual Regret Value and Group Utility Value for Each Alternative with Respect to Each Safety Evaluation Standard Level
- 5.
- Calculate the Compromise Value
- 6.
- Ranking of Alternatives
- 7.
- Acquiring the Optimal Solution
- (a)
- If Condition 1 is not met, the compromise solution includes both , where the value of m is determined by Equation (35):
- (b)
- If only Condition 2 is not satisfied, then both the alternatives and (the ones with the smallest and the second smallest values, respectively) are considered as optimal solutions. In this case, both and are the compromise solutions.
3. Safety Risk Assessment Method for Quayside Container Cranes Based on BWM–Pythagorean Hesitant Fuzzy VIKOR Method
4. Case Study Verification
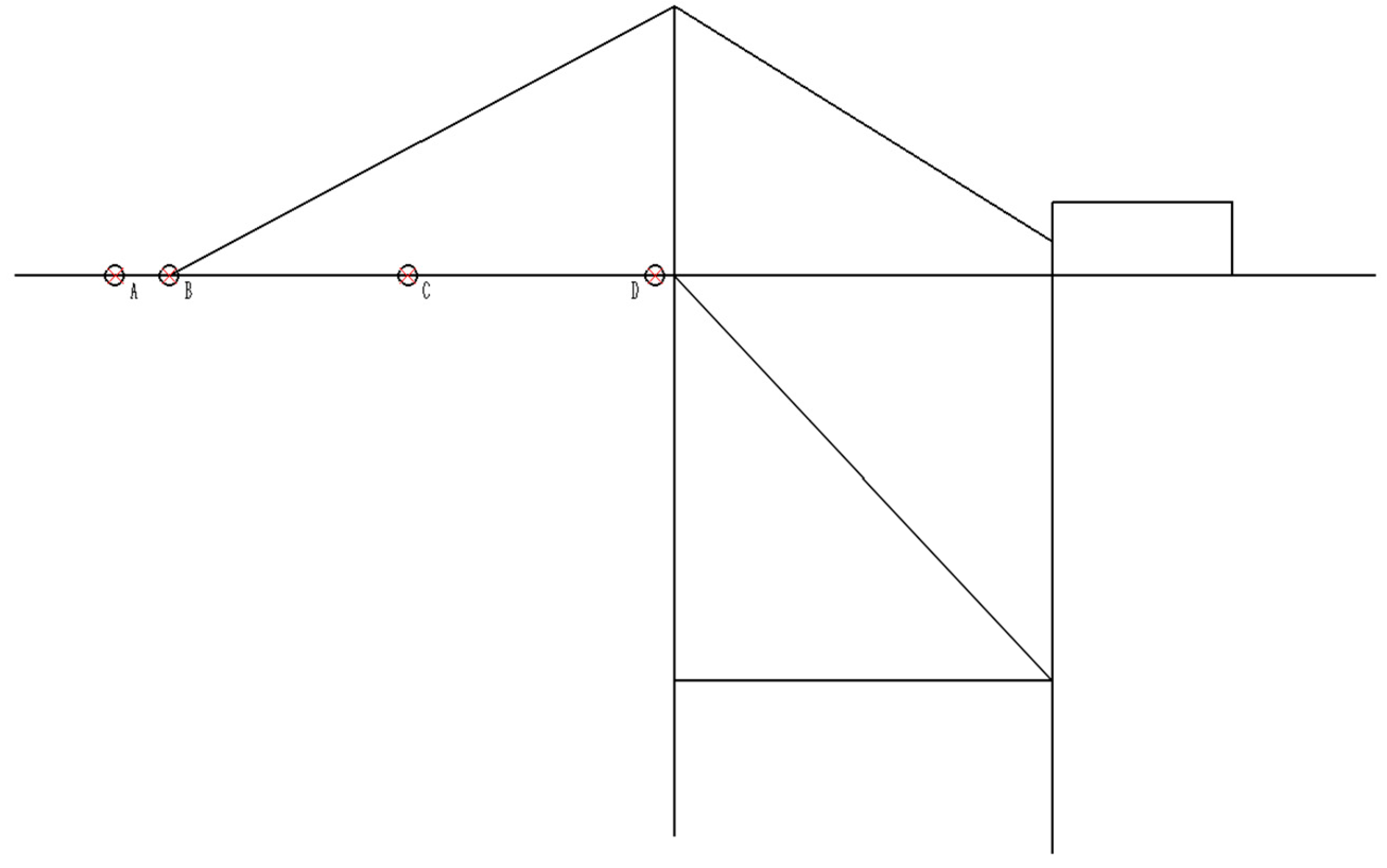
4.1. Basic Parameters of the Object under Evaluation
4.2. Safety Evaluation Level Classification for Quayside Container Cranes
4.3. Data Collection for Indicators of the Equipment under Evaluation
4.4. Determination of Weights for Each Evaluation Indicator
4.5. Determination of Safety Risk Level for the Quayside Container Crane Equipment under Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, H.; Jiang, Z.; Li, Z.; Peng, Y.; Zhang, Q.; Xiao, X. The Interface Strengthening of Multi-Walled Carbon Nano-tubes/Polylactic Acid Composites via the In-Loop Hybrid Manufacturing Method. Polymers 2023, 15, 4426. [Google Scholar] [CrossRef]
- Pandeya, S.P.; Zou, S.; Roh, B.-M.; Xiao, X. Programmable Thermo-Responsive Self-Morphing Structures Design and Performance. Materials 2022, 15, 8775. [Google Scholar] [CrossRef]
- Fenton, N.; Wang, W. Risk and confidence analysis for fuzzy multicriteria decision making. Knowl.-Based Syst. 2006, 19, 430–437. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inform. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Cornells, C.; Deschrijver, G.; Kerre, E.E. Implication in intuitionistic fuzzy and interval-valued fuzzy set theory: Construction, classification, application. Int. J. Approx. Reason. 2004, 35, 55–95. [Google Scholar] [CrossRef]
- Mcculloch, J.; Wagner, C.; Aickelin, U. Extending Similarity Measures of Interval Type-2 Fuzzy Sets to General Type-2 Fuzzy Sets. In Proceedings of the 2013 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Hyderabad, India, 7–10 July 2013. [Google Scholar]
- Vicenç, T. Hesitant Fuzzy Sets. Int. J. Intell. Syst. 2010, 25, 529–539. [Google Scholar]
- Yager, R.R.; Abbasov, A.M. Pythagorean Membership Grades, Complex Numbers, and Decision Making. Int. J. Intell. Syst. 2013, 28, 436–452. [Google Scholar] [CrossRef]
- Yager, R.R. Pythagorean Fuzzy Subsets. In Proceedings of the IFSA World Congress & NAFIPS Meeting, Edmonton, AB, Canada, 24–28 June 2013. [Google Scholar]
- Yager, R.R. Pythagorean Membership Grades in Multicriteria Decision Making. IEEE Trans. Fuzzy Syst. 2014, 22, 958–965. [Google Scholar] [CrossRef]
- Garg, H. Generalized Pythagorean Fuzzy Geometric Aggregation Operators Using Einstein T-Norm and T-Conorm for Multicriteria Decision-Making Process. Int. J. Intell. Syst. 2017, 32, 597–630. [Google Scholar] [CrossRef]
- Zhang, R.; Wang, J.; Zhu, X.; Xia, M.; Yu, M. Some Generalized Pythagorean Fuzzy Bonferroni Mean Aggregation Operators with Their Application to Multiattribute Group Decision-Making. Complexity 2017, 2017, 5937376. [Google Scholar] [CrossRef]
- Chen, T.Y. Remoteness Index-Based Pythagorean Fuzzy VIKOR Methods with a Generalized Distance Measure for Multiple Criteria Decision Analysis. Inf. Fusion 2018, 41, 129–150. [Google Scholar] [CrossRef]
- Yang, W.; Wang, C.; Liu, Y.; Sun, Y. Hesitant Pythagorean Fuzzy Interaction Aggregation Operators and Their Application in Multiple Attribute Decision-Making. Complex Intell. Syst. 2019, 5, 199–216. [Google Scholar] [CrossRef]
- Garg, H. Hesitant Pythagorean Fuzzy Maclaurin Symmetric Mean Operators and Its Applications to Multiattribute Decision-Making Process. Int. J. Intell. Syst. 2019, 34, 601–626. [Google Scholar] [CrossRef]
- Yu, P.L. A Class of Solutions for Group Decision Problems. Manag. Sci. 1973, 19, 936–946. [Google Scholar] [CrossRef]
- Hwang, C.L.; Yoon, K. Multiple Attribute Decision Making; Springer: Berlin/Heidelberg, Germany, 1981. [Google Scholar]
- Opricovic, S. Multicriteria Optimization of Civil Engineering Systems; Faculty of Civil Engineering: Belgrade, Serbia, 1998. [Google Scholar]
- Mareschal, B.; Brans, J.P.; Vincke, P. PROMETHEE: A New Family of Outranking Methods in Multicriteria Analysis; ULB Institutional Repository: Bruxelles, Belgium, 1984. [Google Scholar]
- Opricovic, S.; Tzeng, G.H. Extended VIKOR Method in Comparison with Outranking Methods. Eur. J. Oper. Res. 2007, 178, 514–529. [Google Scholar] [CrossRef]
- Mohanty, P.P.; Mahapatra, S.S. A Compromise Solution by VIKOR Method for Ergonomically Designed Product with Optimal Set of Design Characteristics. Procedia Mater. Sci. 2014, 6, 633–640. [Google Scholar] [CrossRef]
- Chauhan, A.; Vaish, R. Magnetic Material Selection Using Multiple Attribute Decision Making Approach. Mater. Des. 2012, 36, 1–5. [Google Scholar] [CrossRef]
- Yazdani, M.; Payam, A.F. A Comparative Study on Material Selection of Microelectromechanical Systems Electrostatic Actuators Using Ashby, VIKOR and TOPSIS. Mater. Des. 2015, 65, 328–334. [Google Scholar] [CrossRef]
- Bairagi, B.; Dey, B.; Sarkar, B.; Sanyal, S. Selection of Robot for Automated Foundry Operations Using Fuzzy Multi-Criteria Decision Making Approaches. Int. J. Manag. Sci. Eng. Manag. 2014, 9, 221–232. [Google Scholar] [CrossRef]
- Ghorabaee, K.M. Developing an MCDM Method for Robot Selection with Interval Type-2 Fuzzy Sets. Robot. Comput. Integr. Manuf. 2016, 37, 221–232. [Google Scholar] [CrossRef]
- Zhu, G.N.; Hu, J.; Qi, J.; Gu, C.C.; Peng, Y.H. An Integrated AHP and VIKOR for Design Concept Evaluation Based on Rough Number. Adv. Eng. Inform. 2015, 29, 408–418. [Google Scholar] [CrossRef]
- Azaryoon, A.; Hamidon, M.; Radwan, A. An Expert System Based on a Hybrid Multi-Criteria Decision Making Method for Selection of Non-Conventional Machining Processes. Appl. Mech. Mater. 2015, 735, 41–49. [Google Scholar] [CrossRef]
- Kaya, T.; Kahraman, C. Fuzzy Multiple Criteria Forestry Decision Making Based on an Integrated VIKOR and AHP Approach. Expert Syst. Appl. 2011, 38, 7326–7333. [Google Scholar] [CrossRef]
- Xu, H.; Ma, C.; Lian, J.; Xu, K.; Chaima, E. Urban Flooding Risk Assessment Based on an Integrated K-Means Cluster Algorithm and Improved Entropy Weight Method in the Region of Haikou, China. J. Hydrol. 2018, 563, 975–986. [Google Scholar] [CrossRef]
- Chen, Y.L.; Shen, S.L.; Zhou, A. Assessment of Red Tide Risk by Integrating CRITIC Weight Method, TOPSIS-Assets Method, and Monte Carlo Simulation. Environ. Pollut. 2022, 314, 120254. [Google Scholar] [CrossRef] [PubMed]
- Ghodusinejad, M.H.; Lavasani, Z.; Yousefi, H.; Lund, H.; Kaiser, M.J. A Combined Decision-Making Framework for Techno-Enviro-Economic Assessment of a Commercial CCHP System. Energy 2023, 276, 127609. [Google Scholar] [CrossRef]
- Gan, J. Discrete Hopfield Neural Network Approach for Crane Safety Evaluation. In Proceedings of the 2017 International Conference on Mechanical, System and Control Engineering (ICMSC), St. Petersburg, Russia, 19–21 May 2017. [Google Scholar]
- Nadjafi, M.; Farsi, M.A.; Zio, E.; Mousavi, A.K. Fault Trees Analysis Using Expert Opinion Based on Fuzzy-Bathtub Failure Rates. Qual. Reliab. Eng. Int. 2018, 34, 1142–1157. [Google Scholar] [CrossRef]
- Yang, L.; Rauzy, A. Epistemic Space of Degradation Processes. J. Appl. Non-Class. Log. 2020, 31, 1–25. [Google Scholar] [CrossRef]
- Zaitseva, E.; Levashenko, V.; Rabcan, J. A New Method for Analysis of Multi-State Systems Based on Multi-Valued Decision Diagram Under Epistemic Uncertainty. Reliab. Eng. Syst. Saf. 2023, 229, 108868. [Google Scholar] [CrossRef]
- Ren, Z.; Xu, Z.; Wang, H. Dual Hesitant Fuzzy VIKOR Method for Multi-Criteria Group Decision Making Based on Fuzzy Measure and New Comparison Method. Inf. Sci. 2017, 388–389, 1–16. [Google Scholar] [CrossRef]
- Kaya, A.; Bahan, V.; Ust, Y. Selection of Marine Type Air Compressor by Using Fuzzy VIKOR Methodology. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2022, 236, 103–112. [Google Scholar] [CrossRef]
- Rezaei, J.; Wang, J.; Tavasszy, L. Linking Supplier Development to Supplier Segmentation Using Best Worst Method. Expert Syst. Appl. 2015, 42, 9152–9164. [Google Scholar] [CrossRef]
- Ploskas, N.; Papathanasiou, J. A Decision Support System for Multiple Criteria Alternative Ranking Using TOPSIS and VIKOR in Fuzzy and Nonfuzzy Environments. Fuzzy Sets Syst. 2019, 377, 1–30. [Google Scholar] [CrossRef]
- GB/T 6067.1-2010; Safety Rules for Lifting Appliances: Part 1: General. Standardization Administration of the People’s Republic of China: Beijing, China, 2010.
- GB/T 3811-2008; Design Rules for Cranes. Standardization Administration of the People’s Republic of China: Beijing, China, 2008.
- GB/T 15361-2009; Quayside Container Crane. Standardization Administration of the People’s Republic of China: Beijing, China, 2009.
- JT/T 79-2008; Inspection and Test Standards for Port Container Hoist Machines. Ministry of Transport of the People’s Republic of China: Beijing, China, 2008.

{kind=link}
{kind=link}
| Rated Lifting Capacity | Rigging | 65 | t | Hoisting Speed | Full Load | 70 | m/min |
| Hook | 75 | No Load | 180 | m/min | |||
| Outreach | - | 65 | m | Trolley Travel Speed | - | 240 | m/min |
| Backreach | - | 16 | m | Gantry Travel Speed | - | 45 | m/min |
| Gauge | - | 30 | m | Gantry Wheels | Total/Drive | 40/20 | - |
| Lifting Height | Above Track | 48 | m | Hoisting Motor | 2 × 450 KW | 750/1929 | rpm |
| Below Track | 17 | m | Trolley Motor | 250 KW | 1150 | rpm | |
| Main Beam Luffing Time | 0~80° | <=6 | min | Gantry Motor | 20 × 18.5 KW | 1280 | rpm |
| Overall Working Class of the Machine | U8-Q3-A8 | - | Luffing Motor | 315 KW | 1500 | rpm | |
| Test Area | Front Main Beam | Truss Frame | Gantry Leg | Rear Tie Rod | Crossbeam |
|---|---|---|---|---|---|
| Test Value/MPa | 110.7 | 107.3 | 88.5 | 118.4 | 50.3 |
| Test Area | Measurement Point A | Measurement Point B | Measurement Point C | Measurement Point D |
|---|---|---|---|---|
| No-Load Test Value/m | 35.2007 | 35.1977 | 35.2075 | 35.2067 |
| Rated Load Test Value/m | 35.0304 | 35.1420 | 35.1461 | 35.1978 |
| Deflection Amount/m | −0.1703 | −0.0557 | −0.0614 | −0.0089 |
| Test Area | Main Beam | Gantry Leg | Truss Frame | Tie Rod | Crossbeam |
|---|---|---|---|---|---|
| Deformation Amount/mm | - | 4.2 | 2.7 | - | 1.5 |
| Crack Location | Right Main Beam | Right Main Beam | Right Main Beam | Connection Point of Left Gantry Leg and Lower Crossbeam |
|---|---|---|---|---|
| Crack Length/mm | 22 | 25 | 18 | 17 |
| Test Area | Main Beam | Gantry Leg | Truss Frame | Tie Rod | Crossbeam |
|---|---|---|---|---|---|
| Uncorroded Area/mm | 14.80 | 24.74 | 30.12 | 11.97 | 15.38 |
| Corroded Area/mm | 14.17 | 14.65 | 29.09 | 11.89 | 15.27 |
| Loss Ratio | −4.26% | −40.78% | −3.42% | −0.67% | −0.72% |
| Evaluation Criteria | Evaluation Results |
|---|---|
| Indicator | |||||
|---|---|---|---|---|---|
| Degree of Preference | 1 | 2 | 1 | 4 | 3 |
| Indicator | |||||
|---|---|---|---|---|---|
| Degree of Preference | 5 | 3 | 4 | 1 | 2 |
| Evaluation Criteria | Evaluation Results |
|---|---|
| Evaluation Criteria | Evaluation Results | Evaluation Criteria | Evaluation Results |
|---|---|---|---|
| 0.1254 | 0.0068 | ||
| 0.0731 | 0.0052 | ||
| 0.1097 | 0.0068 | ||
| 0.0314 | 0.0102 | ||
| 0.0470 | 0.0343 | ||
| 0.0529 | 0.0905 | ||
| 0.0101 | 0.0343 | ||
| 0.0277 | 0.0437 | ||
| 0.0185 | 0.0156 | ||
| 0.0068 | 0.0808 | ||
| 0.0180 | 0.0449 | ||
| 0.0031 | 0.0299 | ||
| 0.0052 | 0.0449 | ||
| 0.0052 | 0.0180 |
| Column 1 | ||
| Column 2 | ||
| Column 3 | ||
| Column 4 | ||
| Column 5 |
| 0 | 0 | 0 | |
| 0.2446 | 0.0598 | 0.1522 | |
| 0.4712 | 0.0890 | 0.2801 | |
| 0.6580 | 0.1014 | 0.3797 | |
| 0.8545 | 0.1143 | 0.4844 | |
| 1 | 0.1254 | 0.5627 | |
| 0.3864 | 0.0583 | 0.2224 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Xiao, H.; Sun, F.; Yan, L.; Liu, M. Research on the Safety Evaluation Method for Quayside Container Cranes Based on the Best–Worst Method–Pythagorean Fuzzy VIKOR Approach. Appl. Sci. 2024, 14, 1312. https://doi.org/10.3390/app14031312
Yu J, Xiao H, Sun F, Yan L, Liu M. Research on the Safety Evaluation Method for Quayside Container Cranes Based on the Best–Worst Method–Pythagorean Fuzzy VIKOR Approach. Applied Sciences. 2024; 14(3):1312. https://doi.org/10.3390/app14031312
Chicago/Turabian StyleYu, Jiashuo, Hanbin Xiao, Feiyue Sun, Likang Yan, and Min Liu. 2024. "Research on the Safety Evaluation Method for Quayside Container Cranes Based on the Best–Worst Method–Pythagorean Fuzzy VIKOR Approach" Applied Sciences 14, no. 3: 1312. https://doi.org/10.3390/app14031312