

Improvements in Rock Mass Description for Stope Design by Geophysical and Geochemical Methods

 ,
,  ,
,  , , and
, , and
Abstract
1. Introduction
2. Recent Research in Stope Design Methods
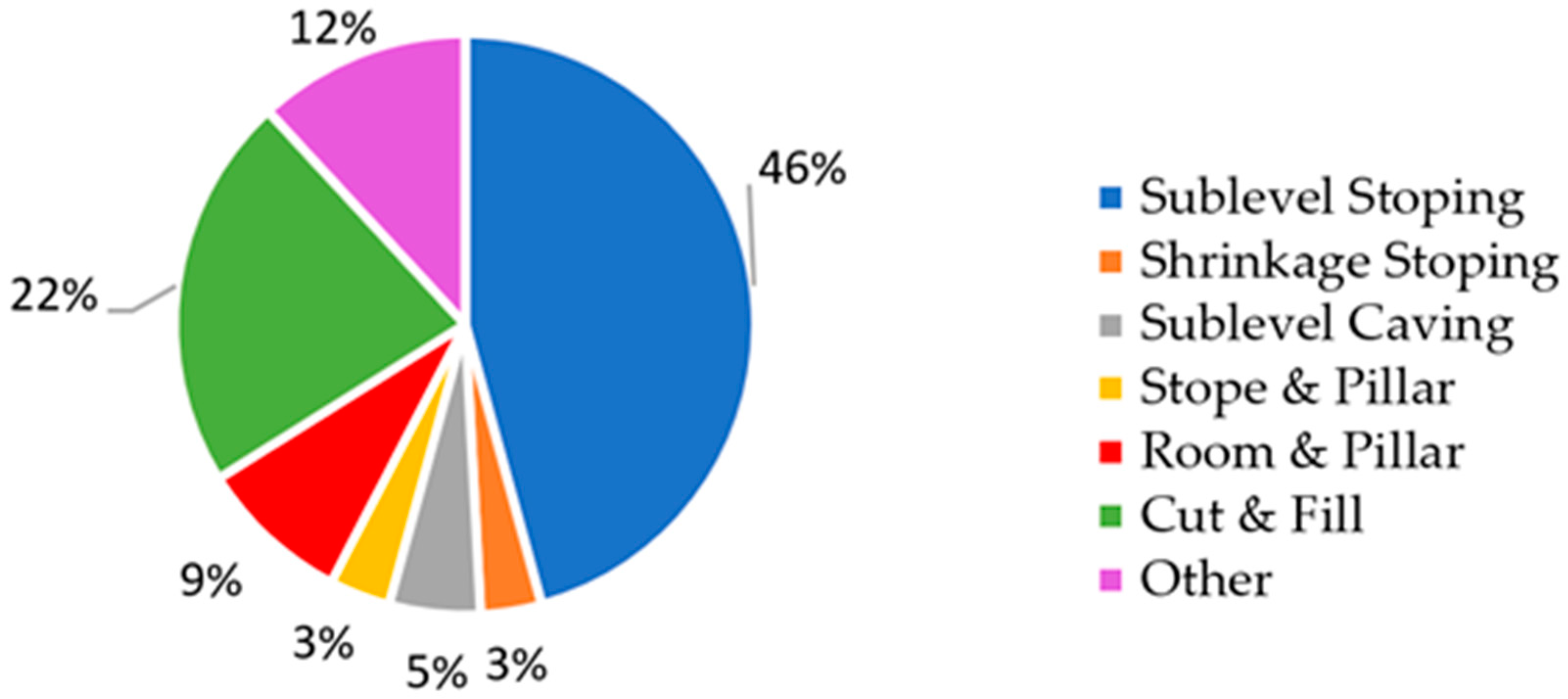
3. Industry Survey on Stope Design
3.1. Survey Methodology
3.2. Survey Results and Discussion
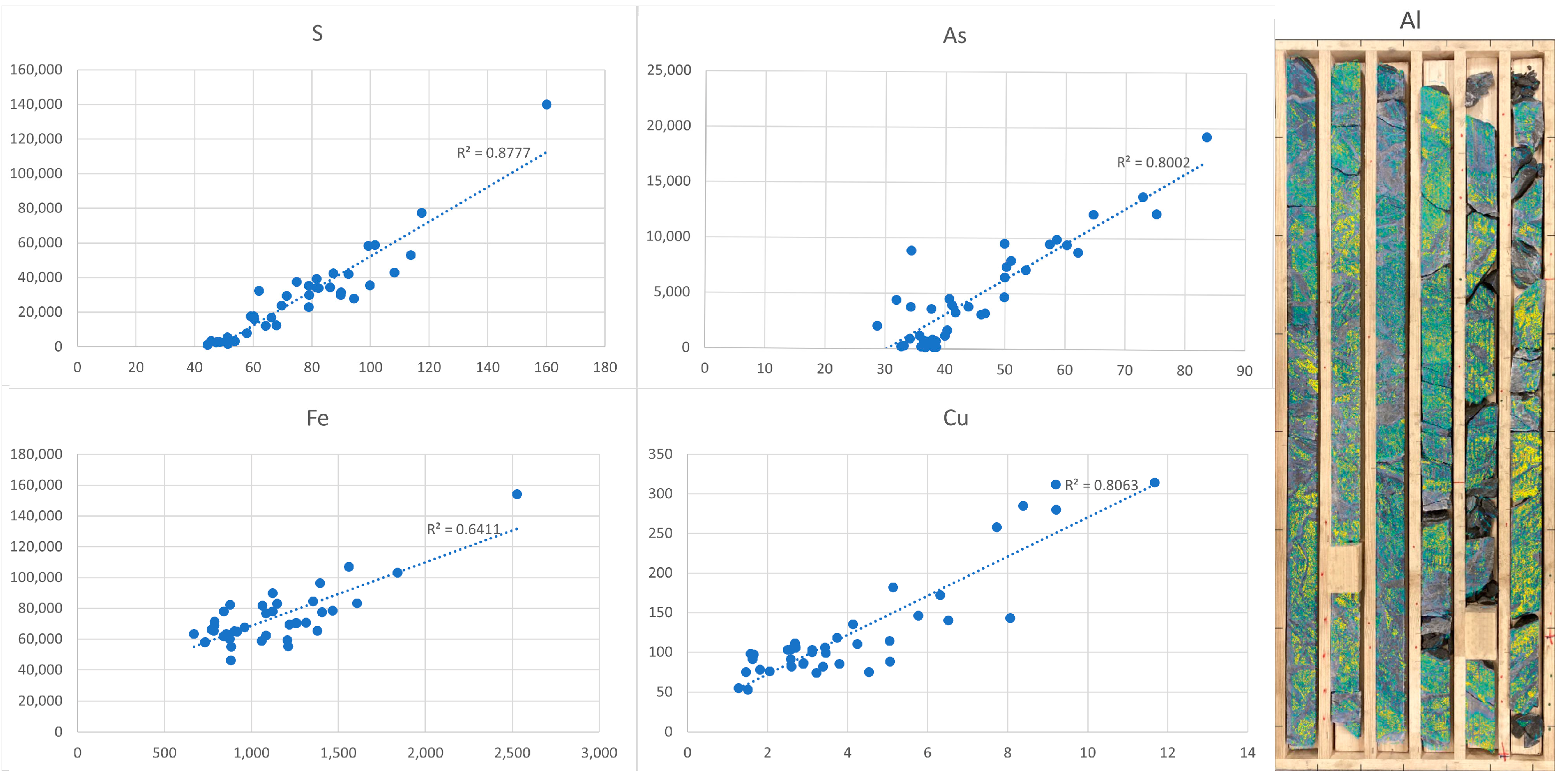
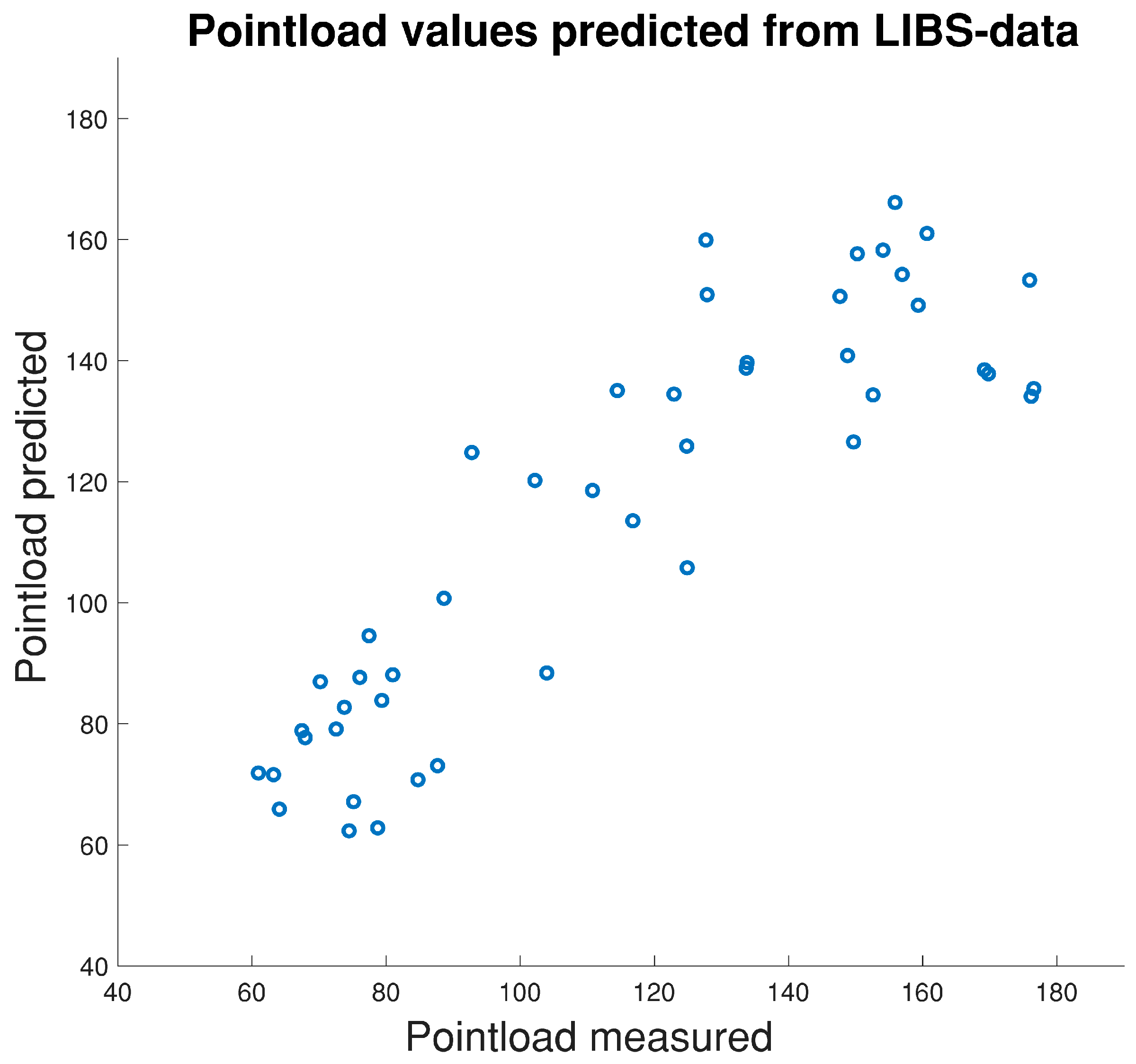
4. Laser-Induced Breakdown Spectrometry (LIBS) for Geochemical and Geometallurgical Characterization
4.1. LIBS Methodology
4.2. Results
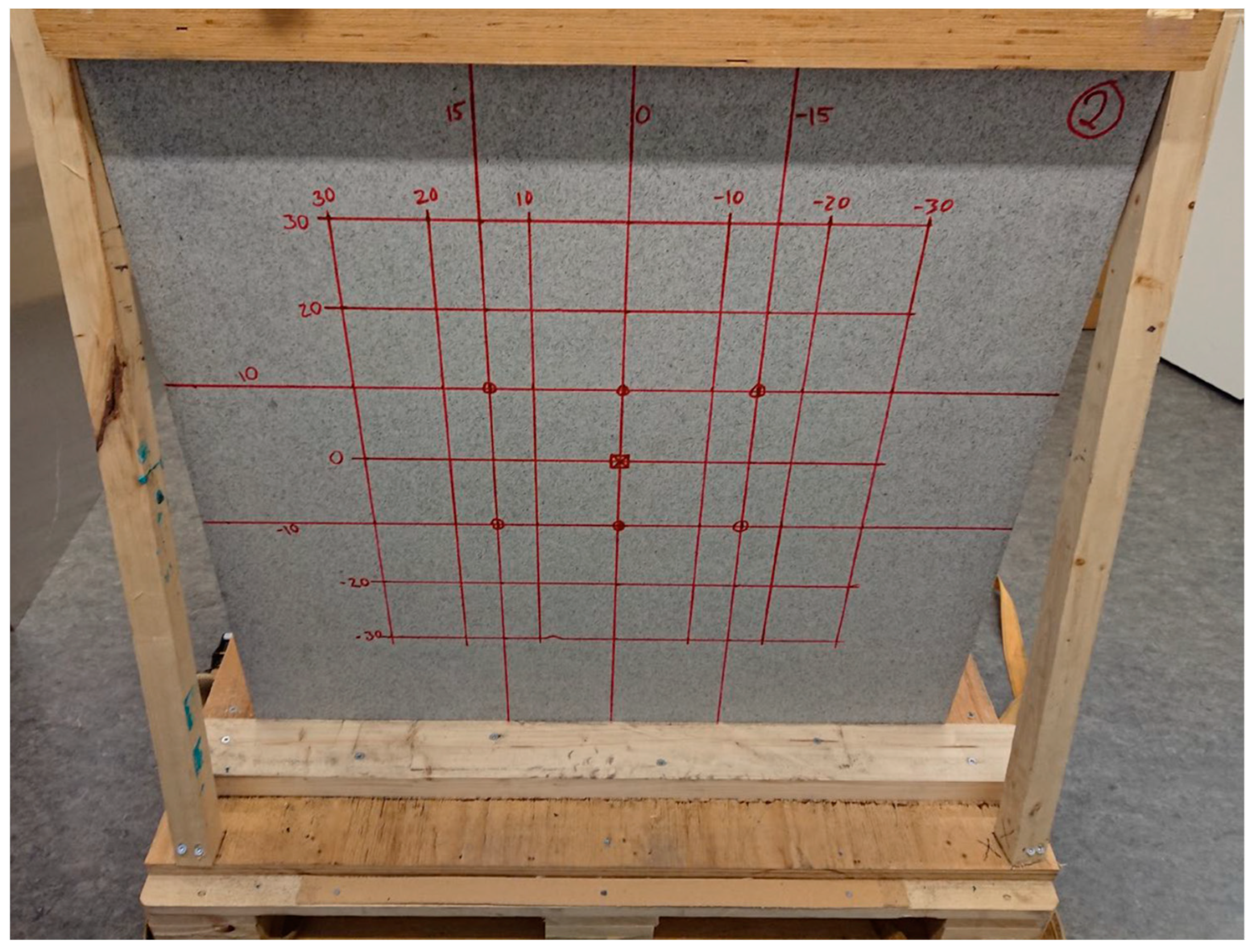
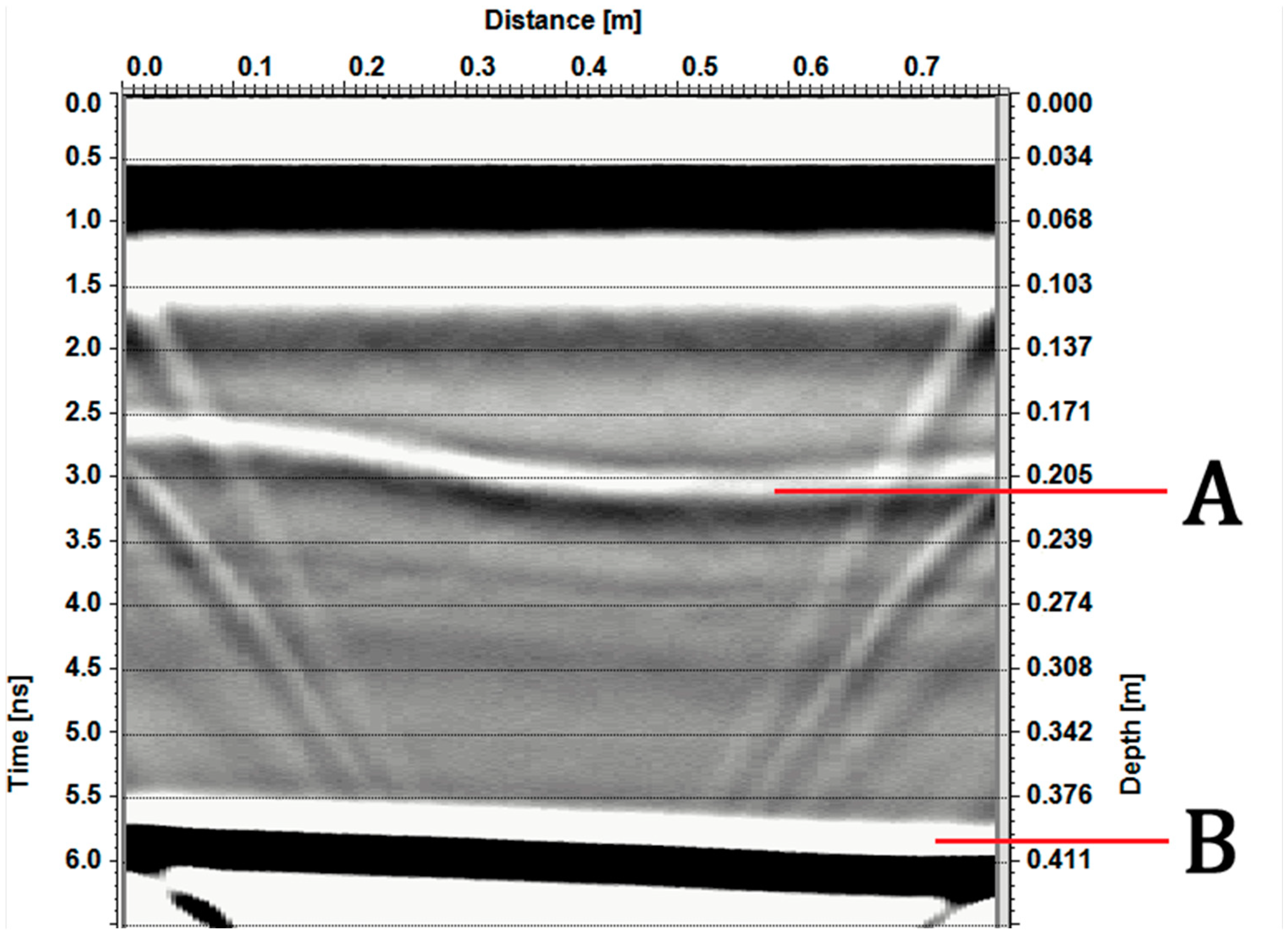
5. Ground-Penetrating Radar (GPR) for Representation of Fracture Surface Geometry
5.1. Methodology
5.2. Results and Discussion
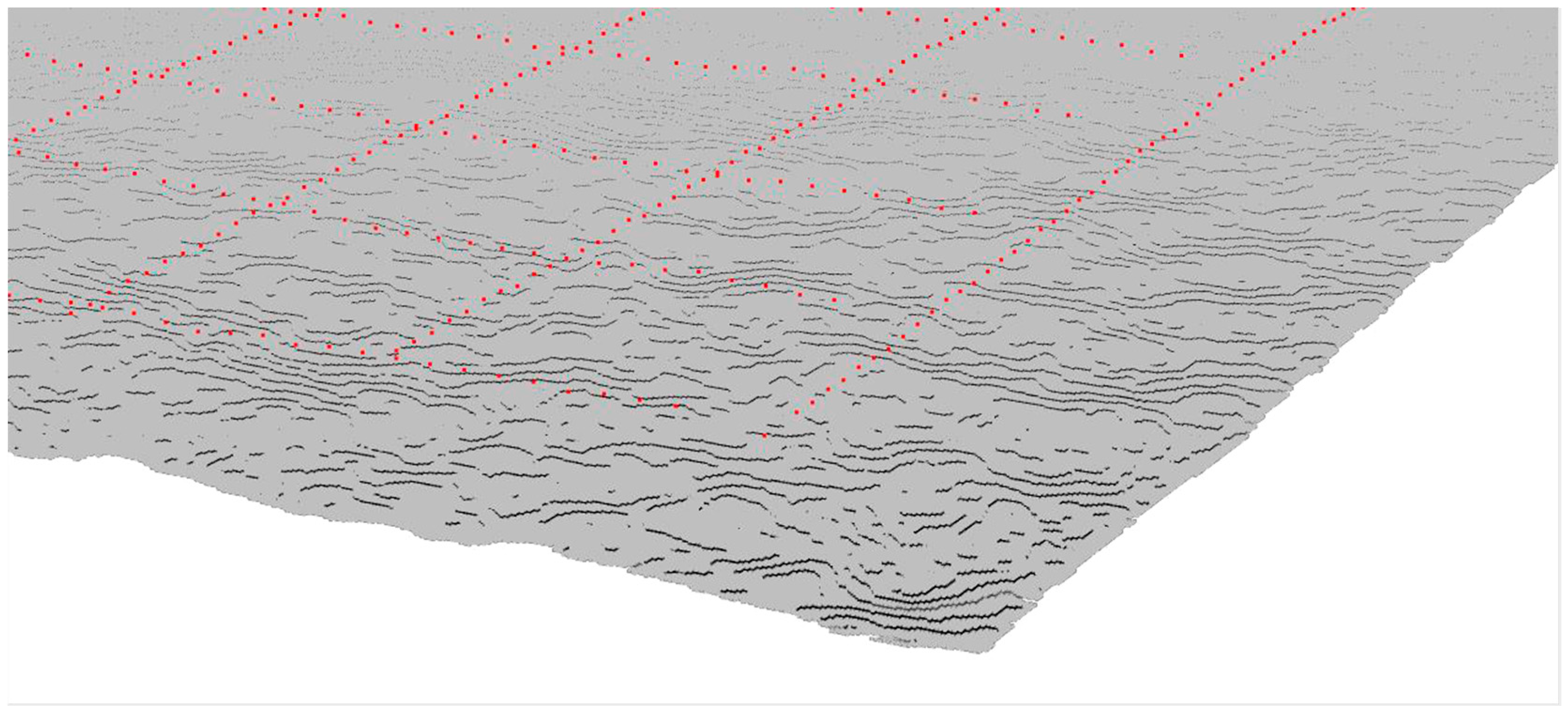
6. Photogrammetric Scanning for Rapid Geometrical Characterization
6.1. Methodology

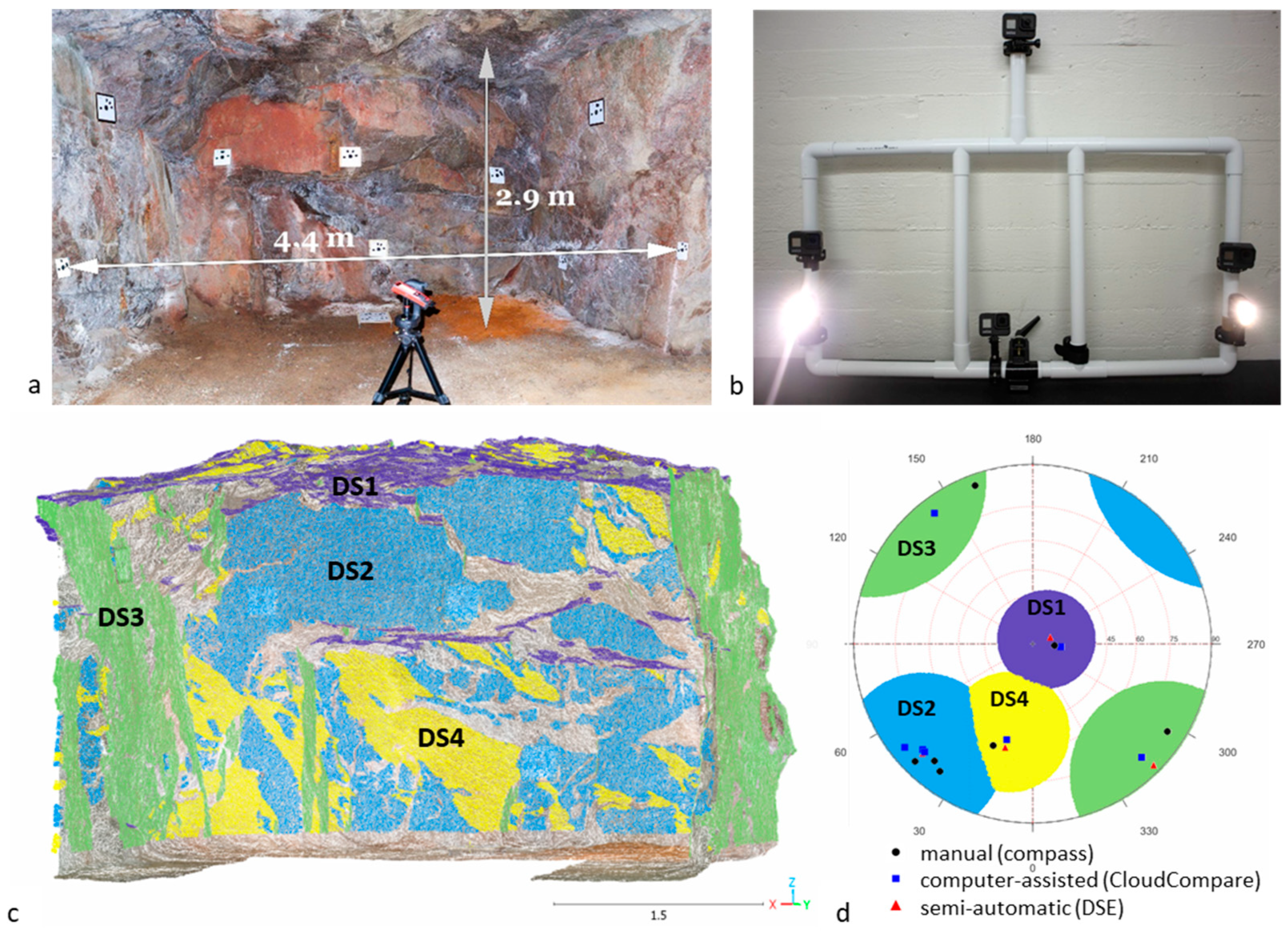
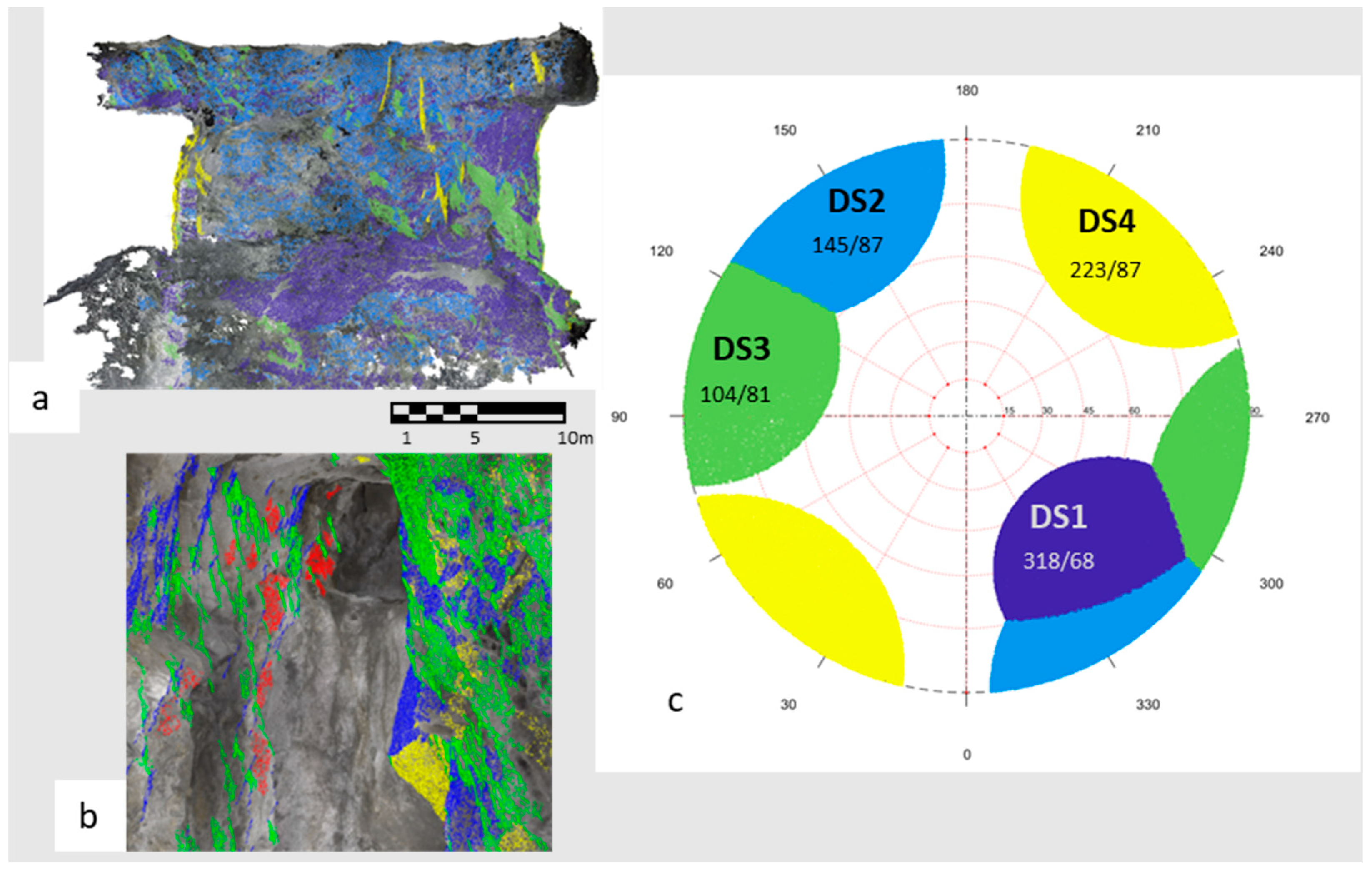
6.2. Results and Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wagner, H. Deep Mining: A Rock Engineering Challenge. Rock Mech. Rock Eng. 2019, 51, 1417–1446. [Google Scholar] [CrossRef]
- Mark, C. Science of empirical design in mining ground control. Int. J. Min. Sci. Technol. 2016, 26, 461–470. [Google Scholar] [CrossRef]
- Suorineni, F.T. Reflections on empirical methods in geomechanics–The unmentionables and hidden risks. In Proceedings of the 3rd Australasian Ground Control in Mining Conference, Sydney, Australia, 5–6 November 2014. [Google Scholar]
- Vallejos, J.A.; Miranda, R.; Burgos, L.; Perez, E. Development of New Design Tools for Open Stoping Underground Mines. In Proceedings of theAmerican Rock Mechanics Association, San Francisco, CA, USA, 25–28 June 2017. [Google Scholar]
- Zhou, X.; Zhao, X.; Qu, Q.; Shi, J. Stope Structural Parameters Design towards Green and Deep Mining: A Review. Processes 2023, 11, 3125. [Google Scholar] [CrossRef]
- Erdogan, G.; Yavuz, M. Application of Three Existing Stope Boundary Optimisation Methods in an Operating Underground Mine; IOP Publishing: Bristol, UK, 2017; Volume 95, p. 042077. [Google Scholar]
- Erdogan, G.; Cigla, M.; Topal, E.; Yavuz, M. Implementation and comparison of four stope boundary optimization algorithms in an existing underground mine. Int. J. Min. Reclam. Environ. 2017, 31, 389–403. [Google Scholar] [CrossRef]
- Pontow, S. Evaluation of Methods for Stope Design in Mining and Potential of Improvement by Pre-Investigations. Master’s Thesis, Aalto University, School of Engineering, Espoo, Finland, 2019. [Google Scholar]
- Janiszewski, M.; Pontow, S.; Rinne, M. Industry Survey on the Current State of Stope Design Methods in the Underground Mining Sector. Energies 2022, 15, 240. [Google Scholar] [CrossRef]
- Grieco, N.; Dimitrakopoulos, R. Managing grade risk in stope design optimisation. Min. Techn. 2007, 116, 49–57. [Google Scholar] [CrossRef]
- Villalba Matamoros, M.E.; Kumral, M. Underground mine planning: Stope layout optimisation under grade uncertainty using genetic algorithms. Int. J. Min. Recl. Environ. 2019, 33, 353–370. [Google Scholar] [CrossRef]
- Bootsma, M.; Alford, C.; Benndorf, J.; Buxton, M. Cut-off Grade Based Sublevel Stope Mine Optimisation. In Advances in Applied Strategic Mine Planning; Springer: Cham, Switzerland, 2018; pp. 537–557. [Google Scholar]
- Will, K.; Vendla, S. Underground Cut-off Grade Optimisation in Narrow Vein Deposits Based on an Innovative Mine Design Algorithm. Min. Rep. Glückauf 2018, 154, 452–459. [Google Scholar]
- Hou, X.; Dowd, P. Integrated optimisation of stope boundary and access layout for underground mining opera-tions. Min. Technol. 2019, 128, 193–205. [Google Scholar] [CrossRef]
- Hou, J.; Li, G.; Wang, H.; Hu, N. Genetic algorithm to simultaneously optimise stope sequencing and equipment dispatching in underground short-term mine planning under time uncertainty. Int. J. Min. Recl. Environ. 2019, 34, 307–32519. [Google Scholar] [CrossRef]
- Razavi, M.; Espley, S.; Yao, M. Open Stope Stability Analysis of VRM Stope in the Vicinity of Creighton Fault by Numerical and Empirical Methods; American Rock Mechanics Association: San Francisco, CA, USA, 2011. [Google Scholar]
- Mishra, R.; Kiuru, R.; Uotinen, L.; Janiszewski, M.; Rinne, M. Combining expert opinion and instrumentation data using Bayesian networks to carry out stope collapse risk assessment. In Proceedings of the Conference on Mining Geomechanical Risk, Perth, Australia, 9–11 April 2019. [Google Scholar]
- Mousavi, A.; Sellers, E. Optimisation of production planning for an innovative hybrid underground mining method. Resour. Policy 2019, 62, 184–192. [Google Scholar] [CrossRef]
- McGaughey, J. Artificial intelligence and big data analytics in mining geomechanics. In Proceedings of the Conference on Deep and High Stress Mining, SAIMM, Johannesburg, South Africa, 24–25 June 2019; pp. 45–54. [Google Scholar]
- Adoko, A.C.; Saadaari, F.; Mireku-Gyimah, D. A Feasibility Study on the Implementation of Neural Network Classifiers for Open Stope Design. Geotech. Geol. Eng. 2021, 1–20. [Google Scholar] [CrossRef]
- Bazarbay, B.; Adoko, A.C. A Comparison of Prediction and Classification Models of Unplanned Stope Dilution in Open Stope Design. In Proceedings of the 55th U.S. Rock Mechanics/Geomechanics Symposium, Virtual Event, 22 June 2021. [Google Scholar]
- Bouzeran, L.; Pierce, M.; Jalbout, A.; Ruest, M. Stoping sequence optimisation at Eleonore Mine based on stress analysis through horizon scale numerical modelling. In Proceedings of the 9th International Conference on Deep and High Stress Mining, SAIMM, Johannesburg, South Africa, 24–25 June 2019; pp. 253–266. [Google Scholar]
- Sotoudeh, F.; Kakaie, R.; Ataei, M. Development of a computer program for underground mine stope optimisation using a heuristic algorithm. In Proceedings of the Conference on Underground Mining Technology, Sudbury, ON, Canada, 11–13 October 2017; pp. 689–700. [Google Scholar]
- Harmon, R.S.; Senesi, G.S. Laser-Induced Breakdown Spectroscopy—A Geochemical Tool for the 21st Century. Appl. Geochem. 2021, 128, 104929. [Google Scholar] [CrossRef]
- Senesi, G.S. Laser-Induced Breakdown Spectroscopy (LIBS) Applied to Terrestrial and Extraterrestrial Analogue Geomaterials with Emphasis to Minerals and Rocks. Earth-Sci. Rev. 2014, 139, 231–267. [Google Scholar] [CrossRef]
- Zorov, N.B.; Gorbatenko, A.A.; Labutin, T.A.; Popov, A.M. A review of normalization techniques in analytical atomic spectrometry with laser sampling: From single to multivariate correction. Spectrochim. Acta Part B At. Spectrosc. 2010, 65, 642–657. [Google Scholar] [CrossRef]
- Kangas, L.; Leveinen, J. Towards Real-Time Ore Grade Evaluation Using Laser-Induced Breakdown Spectroscopy. In Proceedings of the 33rd Nordic Geological Winter Meeting, Kgs. Lyngby, Denmark, 10–20 January 2018. [Google Scholar]
- Maurice, S.; Jacob, X.; Couvert, L.; Mimoun, D.; Wiens, R.C.; Rapin, W.; Cousin, A.; Forni, O.; Gasnault, O.; Lasue, J.; et al. Acoustic Recording of LIBS Analyses in Preparation for Mars 2020. In Proceedings of the Lunar and Planetary Science XLVIII, The Woodlands, TX, USA, 20–24 March 2017. [Google Scholar]
- Millington, J. Site Specific Calibration of Laser Induced Breakdown Spectroscopy for Rapid Elemental Analysis of Gold Ore Drill Core Samples. Master’s Thesis, Aalto University, School of Engineering, Espoo, Finland, 2020. [Google Scholar]
- Laine, I. Scanning Laser-Induced Breakdown Spectrometer for Mine Walls. Master’s Thesis, Aalto University, School of Engineering, Espoo, Finland, 2019. [Google Scholar]
- Lange, M. Development of Geometallurgical Characterization and Comminution Testing of the Kittilä Gold Deposit. Master’s Thesis, Aalto University, School of Engineering, Espoo, Finland, 2019. [Google Scholar]
- Wai-Lok Lai, W.; Dérobert, X.; Annan, P. A review of Ground Penetrating Radar application in civil engineering: A 30-year journey from Locating and Testing to Imaging and Diagnosis. NDT E Int. 2018, 96, 58–78. [Google Scholar] [CrossRef]
- Hou, F.; Rui, X.; Fan, X.; Zhang, H. Review of GPR Activities in Civil Infrastructures: Data Analysis and Applications. Remote Sens. 2022, 14, 5972. [Google Scholar] [CrossRef]
- Garambois, S.; Sénéchal, P.; Perroud, H. On the use of combined geophysical methods to assess water content and water conductivity of near-surface formations. J. Hydrol. 2002, 259, 32–48. [Google Scholar] [CrossRef]
- Dérobert, X.; Iaquinta, J.; Klysz, G.; Balayssac, J.-P. Use of capacitive and GPR techniques for the non-destructive evaluation of cover concrete. NDT E Int. 2008, 41, 44–52. [Google Scholar] [CrossRef]
- Orlando, L.; Slob, E. Using multicomponent GPR to monitor cracks in a historical building. J. Appl. Geophys. 2009, 67, 327–334. [Google Scholar] [CrossRef]
- Francke, J. A review of selected ground penetrating radar applications to mineral resource evaluations. J. Appl. Geophys. 2012, 81, 29–37. [Google Scholar] [CrossRef]
- Sengani, F. The use of ground Penetrating Radar to distinguish between seismic and non-seismic hazards in hard rock mining. Tunn. Undergr. Space Technol. 2020, 103, 103470. [Google Scholar] [CrossRef]
- Grodner, M. Delineation of rockburst fractures with ground penetrating radar in the Witwatersrand Basin, South Africa. Int. J. Rock Mech. Min. Sci. 2001, 38, 885–891. [Google Scholar] [CrossRef]
- Caselle, C.; Bonetto, S.; Comina, C.; Stocco, S. GPR surveys for the prevention of karst risk in underground gypsum quarries. Tunn. Undergr. Space Technol. 2019, 95, 103137. [Google Scholar] [CrossRef]
- Baggett, J.; Abbasi, A.; Monsalve, J.; Bishop, R.; Ripepi, N.; Hole, J. Ground-Penetrating Radar for Karst Detection in Underground Stone Mines. Min. Metall. Explor. 2020, 37, 153–165. [Google Scholar] [CrossRef]
- Church, R.; Webb, W.; Boyle, J. Ground-Penetrating Radar for Strata Control. In USDOI Bureau of Mines Report of Investigations; United States Department of the Interior: Washington, DC, USA, 1985; p. 8954. [Google Scholar]
- Orlando, L. Semiquantitative evaluation of massive rock quality using ground penetrating radar. J. Appl. Geophys. 2003, 52, 1–9. [Google Scholar] [CrossRef]
- Kovin, O. Mapping of evaporite deformation in a potash mine using ground penetrating radar: Upper Kama deposit, Russia. J. Appl. Geophys. 2011, 7, 131–141. [Google Scholar] [CrossRef]
- Follin, S.; Koskinen, L.; Suikkanen, J.; Riihiluoma, N.; Kantia, P.; Kiuru, R.; Mustonen, S. Characterisation of EDZ for Final Disposal Facility of Spent Nuclear Fuel in Olkiluoto; POSIVA Report 2021-16; Posiva Oy: Eurajoki, Finland, 2021. [Google Scholar]
- Kiuru, R.; Kantia, P. Attenuation of ground penetrating radar signal in Kuru granite. In Proceedings of the EUROCK 2020, Virtual, 14–19 June 2020. [Google Scholar]
- García-Luna, R.; Senent, S.; Jurado-Piña, R.; Jimenez, R. Structure from Motion photogrammetry to characterize underground rock masses: Experiences from two real tunnels. Tunn. Undergr. Space Technol. 2019, 83, 262–273. [Google Scholar] [CrossRef]
- Riquelme, A.J.; Abellán, A.; Tomás, R.; Jaboyedoff, M. A new approach for semi-automatic rock mass joints recognition from 3D point clouds. Comput. Geosci. 2014, 68, 38–52. [Google Scholar] [CrossRef]
- Thiele, S.T.; Grose, L.; Samsu, A.; Micketwaite, S.; Vollgger, S.A.; Cruden, A.R. Rapid, semi-automatic fracture and contact mapping for point clouds, images and geophysical data. Solid Earth 2017, 8, 1241–1253. [Google Scholar] [CrossRef]
- Flyability. Photogrammetry dataset. Available online: https://info.flyability.com/photogrammetry-dataset (accessed on 14 December 2022).
- Janiszewski, M.; Torkan, M.; Uotinen, L.; Rinne, M. Rapid photogrammetry with a 360-degree camera for tunnel mapping. Remote Sens. 2022, 14, 5494. [Google Scholar] [CrossRef]
- Janiszewski, M.; Prittinen, M.; Uotinen, L.; Torkan, M.; Rinne, M. Rapid photogrammetric method for rock mass characterization in underground excavations. In Proceedings of the Nordic Rock Mechanics Symposium NROCK2023, Reykjavik, Iceland, 25–26 May 2023. [Google Scholar]
- Leem, J.; Kim, J.; Choi, J.; Song, J.-J. Comparison of an underground rock face 3D modeling performance: SfM-MVS with optimum photographing settings and LiDAR technology. In Proceedings of the 15th ISRM Congress 2023 & 72nd Geomechanics Colloquium, Salzburg, Austria, 4–9 October 2023; pp. 638–643. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research Area | Advantages and Disadvantages |
|---|---|
| Grade uncertainty and associated risk with stope design optimization [10,11] | + Cutoff grade-related optimization + Conclusive approach − Iterative evaluation necessary |
| Iterative cutoff grade optimization [12,13] | + Conclusive approach − High computing power need |
| Integration of stope design into mine planning [14,15] | + Most conclusive approach − Challenges in the inclusion towards iteration |
| Empirical software to create deposit-specific case studies [4,16] | + Based on real experience + Simple − Most likely not a perfectly ideal solution |
| Integration of real-time instrumentation and risk assessment [17] | + Necessary for implementing adequate iteration processes − Requires additional equipment − More complex |
| Novel mining methods and facilitated optimization methods [18] | + Very inclusive approach not limited to mining method-related optimizations − Considerably experimental |
| Big data analytics in mining geomechanics [19] | + Good potential and opportunity to benefit from big data research − Considerable computing capacity and data needed |
| Machine and deep learning for stope designs [20,21] | + Potential decrease in human workload − Experimental |
| Stope-sequencing optimization [22] | + Optimization potential in the execution stage − Not grasping the full optimization potential by focusing on one small factor |
| Efficiency of stope optimization algorithms [23] | + Good potential for cooperation with big data and machine learning − Considerable computing capacity and data needed |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rinne, M.; Janiszewski, M.; Pontow, S.; Uotinen, L.; Kiuru, R.; Kangas, L.; Laine, I.; Leveinen, J. Improvements in Rock Mass Description for Stope Design by Geophysical and Geochemical Methods. Appl. Sci. 2024, 14, 957. https://doi.org/10.3390/app14030957
Rinne M, Janiszewski M, Pontow S, Uotinen L, Kiuru R, Kangas L, Laine I, Leveinen J. Improvements in Rock Mass Description for Stope Design by Geophysical and Geochemical Methods. Applied Sciences. 2024; 14(3):957. https://doi.org/10.3390/app14030957
Chicago/Turabian StyleRinne, Mikael, Mateusz Janiszewski, Sebastian Pontow, Lauri Uotinen, Risto Kiuru, Lasse Kangas, Ilkka Laine, and Jussi Leveinen. 2024. "Improvements in Rock Mass Description for Stope Design by Geophysical and Geochemical Methods" Applied Sciences 14, no. 3: 957. https://doi.org/10.3390/app14030957
APA StyleRinne, M., Janiszewski, M., Pontow, S., Uotinen, L., Kiuru, R., Kangas, L., Laine, I., & Leveinen, J. (2024). Improvements in Rock Mass Description for Stope Design by Geophysical and Geochemical Methods. Applied Sciences, 14(3), 957. https://doi.org/10.3390/app14030957