
A Pavement Crack Detection Method via Deep Learning and a Binocular-Vision-Based Unmanned Aerial Vehicle

Abstract
1. Introduction
2. Materials and Methods
2.1. Overview of the YOLOv5 Algorithm
2.2. Improvements in YOLOv5s Network Model
2.2.1. ECA Attention Mechanism
2.2.2. Optimization of Network Structure and Loss Function
- IoU (Intersection over Union) calculates the ratio of intersection to union between the predicted and actual boxes;
- represents the centroid of the predicted box, and is the centroid of the actual box;
- denotes the Euclidean distance;
- is the length of the diagonal of the encompassing rectangle formed by both boxes;
- is the weight coefficient;measures the aspect ratio discrepancy between the predicted and actual boxes.
2.3. Binocular Distance Measurement Algorithm
- represents the scale factor, indicating the mapping scale;
- denotes the rotation matrix between the camera coordinate system and the world coordinate system;
- and are unit orthogonal vectors within the unit orthogonal matrix;
- symbolizes the translation vector of the camera coordinate system relative to the world coordinate system;
- represents the size of the object on the image plane;
- denotes the camera’s focal length;
- is the actual size of the object in the x-axis direction;
- is the distance from the object to the camera;
- indicates the number of pixels in the object’s width;
- refers to the number of pixels on the camera’s sensor corresponding to 1 cm.
2.4. Crack Segmentation and Quantification Method
3. Implementation Details and Experimental Results
3.1. Production of Datasets
3.2. Experimental Environment and Experimental Subjects
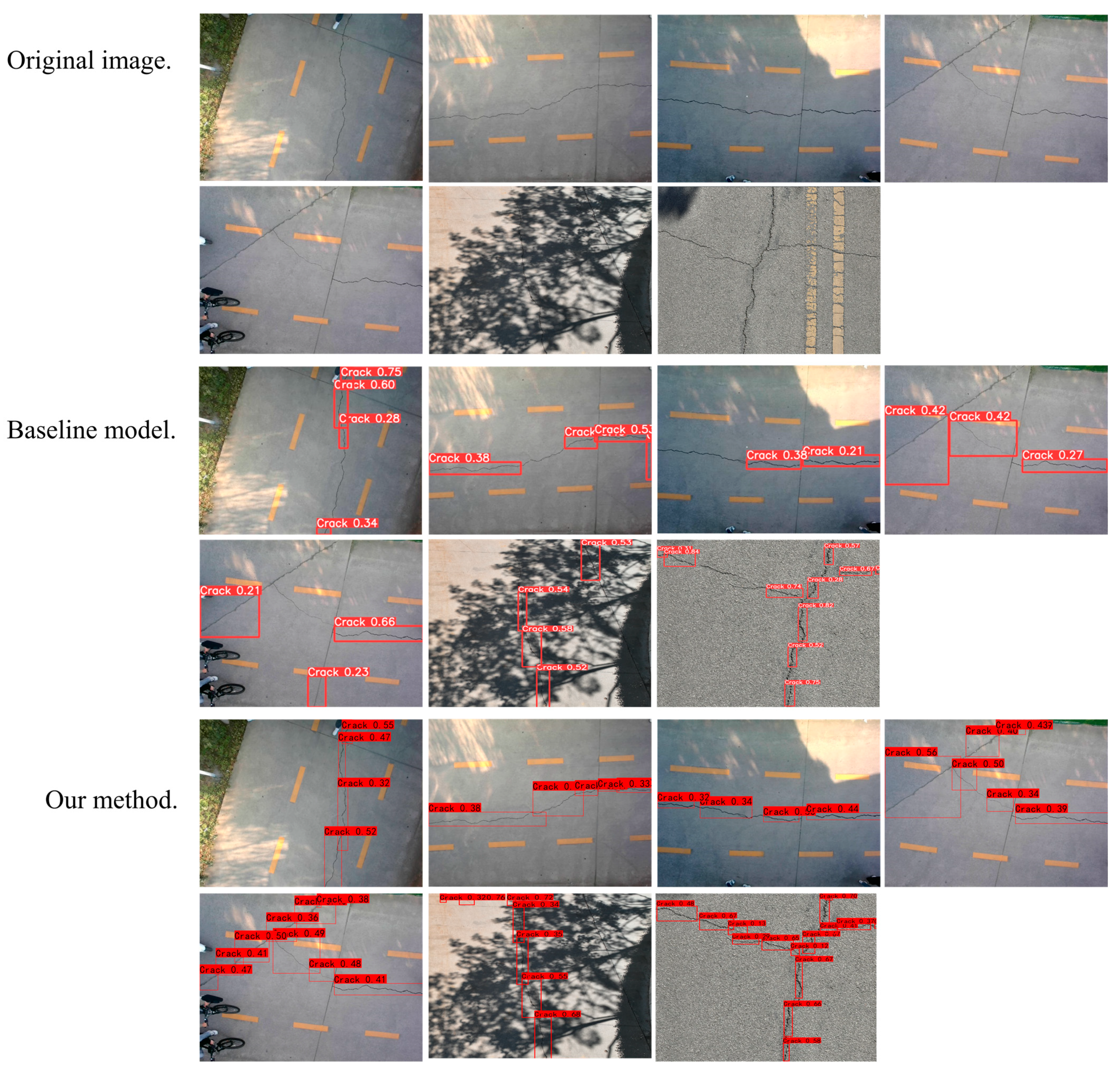
3.3. Comparison of Network Improvements
3.4. Comparison of Crack Measurement Results
3.5. Comparison of Crack Measurement Results
4. Discussion
5. Conclusions
- An improved crack detection algorithm is proposed, significantly enhancing pavement crack recognition accuracy through the optimization of the detection network structure. This algorithm meets stringent accuracy requirements for crack detection in real-world applications, with notable increases in network recall to 86.82% and mAP to 86.32%.
- This study describes a method to accurately measure the photographed depths of different portions of a long crack in a roadway surface using a binocular unmanned aerial vehicle capable of quantifying the widths of various sections of long cracks within images. The method successfully solves the errors arising from relying on approximate distances for depth measurements when UAVs detect pavement and bridge cracks.
- The combined use of binocular UAV vision and deep learning algorithms for crack detection is effectively applied to the quantitative analysis of pavement cracks. For cracks wider than 2 cm, the absolute error does not exceed 3.53 mm, and the maximum relative error is maintained at 9.57%, remaining below the 10% standard.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hsieh, Y.-A.; Tsai, Y.J. Machine learning for crack detection: Review and model performance comparison. J. Comput. Civ. Eng. 2020, 34, 04020038. [Google Scholar] [CrossRef]
- Ali, R.; Chuah, J.H.; Talip, M.S.A.; Mokhtar, N.; Shoaib, M.A. Structural crack detection using deep convolutional neural networks. Autom. Constr. 2022, 133, 103989. [Google Scholar] [CrossRef]
- Kheradmandi, N.; Mehranfar, V. A critical review and comparative study on image segmentation-based techniques for pavement crack detection. Constr. Build. Mater. 2022, 321, 126162. [Google Scholar] [CrossRef]
- Taha, B.; Shoufan, A. Machine learning-based drone detection and classification: State-of-the-art in research. IEEE Access 2019, 7, 138669–138682. [Google Scholar] [CrossRef]
- Meng, S.; Gao, Z.; Zhou, Y.; He, B.; Djerrad, A. Real-time automatic crack detection method based on drone. Comput.-Aided Civ. Infrastruct. Eng. 2023, 38, 849–872. [Google Scholar] [CrossRef]
- Liu, Y.F.; Nie, X.; Fan, J.S.; Liu, X.G. Image-based crack assessment of bridge piers using unmanned aerial vehicles and three-dimensional scene reconstruction. Comput.-Aided Civ. Infrastruct. Eng. 2020, 35, 511–529. [Google Scholar] [CrossRef]
- Liu, Y.; Hajj, M.; Bao, Y. Review of robot-based damage assessment for offshore wind turbines. Renew. Sustain. Energy Rev. 2022, 158, 112187. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, F.; Zhang, Y.D.; Zhu, Y.J. Road crack detection using deep convolutional neural network. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 3708–3712. [Google Scholar]
- Cha, Y.J.; Choi, W.; Büyüköztürk, O. Deep learning-based crack damage detection using convolutional neural networks. Comput.-Aided Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Jiang, Y.; Pang, D.; Li, C. A deep learning approach for fast detection and classification of concrete damage. Autom. Constr. 2021, 128, 103785. [Google Scholar] [CrossRef]
- Yang, F.; Zhang, L.; Yu, S.; Prokhorov, D.; Mei, X.; Ling, H. Feature pyramid and hierarchical boosting network for pavement crack detection. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1525–1535. [Google Scholar] [CrossRef]
- Que, Y.; Dai, Y.; Ji, X.; Leung, A.K.; Chen, Z.; Tang, Y.; Jiang, Z. Automatic classification of asphalt pavement cracks using a novel integrated generative adversarial networks and improved VGG model. Eng. Struct. 2023, 277, 115406. [Google Scholar] [CrossRef]
- Rao, A.S.; Nguyen, T.; Palaniswami, M.; Ngo, T. Vision-based automated crack detection using convolutional neural networks for condition assessment of infrastructure. Struct. Health Monit. 2021, 20, 2124–2142. [Google Scholar] [CrossRef]
- Yu, Y.; Samali, B.; Rashidi, M.; Mohammadi, M.; Nguyen, T.N.; Zhang, G. Vision-based concrete crack detection using a hybrid framework considering noise effect. J. Build. Eng. 2022, 61, 105246. [Google Scholar] [CrossRef]
- Silva, W.R.L.d.; Lucena, D.S.d. Concrete cracks detection based on deep learning image classification. Proceedings 2018, 2, 489. [Google Scholar]
- Duan, H.; Xin, L.; Chen, S. Robust cooperative target detection for a vision-based UAVS autonomous aerial refueling platform via the contrast sensitivity mechanism of eagle’s eye. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 18–30. [Google Scholar] [CrossRef]
- Ma, Y.; Li, Q.; Chu, L.; Zhou, Y.; Xu, C. Real-time detection and spatial localization of insulators for UAV inspection based on binocular stereo vision. Remote Sens. 2021, 13, 230. [Google Scholar] [CrossRef]
- Shuai, C.; Wang, H.; Zhang, W.; Yao, P.; Qin, Y. Binocular vision perception and obstacle avoidance of visual simulation system for power lines inspection with UAV. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 10480–10485. [Google Scholar]
- Gopalakrishnan, K.; Khaitan, S.K.; Choudhary, A.; Agrawal, A. Deep convolutional neural networks with transfer learning for computer vision-based data-driven pavement distress detection. Constr. Build. Mater. 2017, 157, 322–330. [Google Scholar] [CrossRef]
- Lei, B.; Wang, N.; Xu, P.; Song, G. New crack detection method for bridge inspection using UAV incorporating image processing. J. Aerosp. Eng. 2018, 31, 04018058. [Google Scholar] [CrossRef]
- Liu, Y.; Yeoh, J.K.; Chua, D.K. Deep learning–based enhancement of motion blurred UAV concrete crack images. J. Comput. Civ. Eng. 2020, 34, 04020028. [Google Scholar] [CrossRef]
- Kim, H.; Lee, J.; Ahn, E.; Cho, S.; Shin, M.; Sim, S.-H. Concrete crack identification using a UAV incorporating hybrid image processing. Sensors 2017, 17, 2052. [Google Scholar] [CrossRef]
- Liu, Y.; Bao, Y. Intelligent monitoring of spatially-distributed cracks using distributed fiber optic sensors assisted by deep learning. Measurement 2023, 220, 113418. [Google Scholar] [CrossRef]
- Park, S.E.; Eem, S.-H.; Jeon, H. Concrete crack detection and quantification using deep learning and structured light. Constr. Build. Mater. 2020, 252, 119096. [Google Scholar] [CrossRef]
- Yu, J.-y.; Li, F.; Xue, X.-k.; Zhu, P.; Wu, X.-y.; Lu, P.-s. Intelligent Identification of Bridge Structural Cracks Based on Unmanned Aerial Vehicle and Mask R-CNN. China J. Highw. Transp. 2021, 34, 80–90. [Google Scholar]
- Peng, X.; Zhong, X.; Zhao, C.; Chen, A.; Zhang, T. A UAV-based machine vision method for bridge crack recognition and width quantification through hybrid feature learning. Constr. Build. Mater. 2021, 299, 123896. [Google Scholar] [CrossRef]
- Zhou, Q.; Ding, S.; Qing, G.; Hu, J. UAV vision detection method for crane surface cracks based on Faster R-CNN and image segmentation. J. Civ. Struct. Health Monit. 2022, 12, 845–855. [Google Scholar] [CrossRef]
- Ding, W.; Yang, H.; Yu, K.; Shu, J. Crack detection and quantification for concrete structures using UAV and transformer. Autom. Constr. 2023, 152, 104929. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient channel attention for deep convolutional neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 11534–11542. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J. Yolox: Exceeding yolo series in 2021. arXiv 2021, arXiv:2107.08430 2021. [Google Scholar]
- Hirschmuller, H. Accurate and efficient stereo processing by semi-global matching and mutual information. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 807–814. [Google Scholar]
- Zhou, Z.; Siddiquee, M.; Tajbakhsh, N.; Liang, J.U. A nested U-Net architecture for medical image segmentation (2018). arXiv 2018, arXiv:1807.10165. [Google Scholar]
- Zou, Q.; Cao, Y.; Li, Q.; Mao, Q.; Wang, S. CrackTree: Automatic crack detection from pavement images. Pattern Recognit. Lett. 2012, 33, 227–238. [Google Scholar] [CrossRef]
- Shi, Y.; Cui, L.; Qi, Z.; Meng, F.; Chen, Z. Automatic road crack detection using random structured forests. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3434–3445. [Google Scholar] [CrossRef]
- Amhaz, R.; Chambon, S.; Idier, J.; Baltazart, V. Automatic crack detection on two-dimensional pavement images: An algorithm based on minimal path selection. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2718–2729. [Google Scholar] [CrossRef]
- Eisenbach, M.; Stricker, R.; Seichter, D.; Amende, K.; Debes, K.; Sesselmann, M.; Ebersbach, D.; Stoeckert, U.; Gross, H.-M. How to get pavement distress detection ready for deep learning? A systematic approach. In Proceedings of the 2017 International Joint Conference on Neural Networks (IJCNN), Anchorage, AK, USA, 14–19 May 2017; pp. 2039–2047. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015; Volume 28. [Google Scholar]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset Name | Number | Image Size | Example Images |
|---|---|---|---|
| CRACK500 [8] | 500 | 2560 × 1440 pixels 2592 × 1946 pixels |  |
| Cracktree200 [34] | 206 | 800 × 600 pixels |  |
| CFD [35] | 118 | 480 × 320 pixels |  |
| AEL [36] | 58 | 311 × 462 pixels 768 × 512 pixels 700 × 1000 pixels |  |
| GAPs384 [37] | 1969 | 1920 × 1080 pixels |  |
| Configured Contents | Type |
|---|---|
| Operating System | Linux |
| CPU | Xeon(R) Platinum 8352V |
| GPU | NVIDIA GeForce RTX 4090, 24G |
| Pytorch | Version 2.0.1 |
| CUDA | Version 11.7 |
| cuDNN | Version 8.5.0 |
| Python | Version 3.8 |
| Hardware | Configured Contents |
|---|---|
| UAV type | DJI mavic3 |
| Microcomputer | Raspberry Pi 4B |
| Camera frame rate | 30 fps/s |
| Camera pixels | 4 million pixels |
| Maximum camera resolution | 2688 × 1520 |
| Binocular camera baseline | 70 mm |
| Camera focal length | 3.0 mm |
| Network Model | Precision (%) | Recall (%) | mAP (%) |
|---|---|---|---|
| YOLOv5s baseline | 82.57 | 80.57 | 81.02 |
| YOLOv5s + ECA | 80.66 | 83.68 | 82.82 |
| YOLOv5s + decoupled head | 86.41 | 82.56 | 83.12 |
| YOLOv5s + GIoU | 82.12 | 85.55 | 82.33 |
| YOLOv5s + ECA + GIoU + decoupled head | 85.96 | 86.82 | 86.32 |
| Model | mAP (%) | FPS (Frames-1) | Weight (MB) |
|---|---|---|---|
| SSD | 77.32 | 112.2 | 99.7 |
| Faster R-CNN | 87.25 | 33.7 | 602.4 |
| RetinaNet | 81.94 | 55.1 | 153.2 |
| YOLOv5s | 82.61 | 173.5 | 13.4 |
| Our method | 86.32 | 152.7 | 15.3 |
| Sample | No. | Segmentation | Max Width (Pixels) | Distance (m) | Crack Width (mm) | Error Value | ||
|---|---|---|---|---|---|---|---|---|
| UAV | Manual | Abs. (mm) | Rel. (%) | |||||
 | #1 |  | 3.00 | 4.45 | 23.27 | 25.0 | −1.73 | 6.94 |
| #2 |  | 4.00 | 3.97 | 27.67 | 25.5 | 2.17 | 8.53 | |
| #3 |  | 4.24 | 3.78 | 30.22 | 33.0 | −2.78 | 8.42 | |
| #4 |  | 4.00 | 3.70 | 25.79 | 28.5 | −2.71 | 9.50 | |
 | #5 |  | 2.00 | 4.47 | 15.58 | 13.5 | 2.08 | 15.41 |
| #6 |  | 2.83 | 4.19 | 20.66 | 22.5 | −1.84 | 8.16 | |
| #7 |  | 3.00 | 3.98 | 20.81 | 23.0 | −2.19 | 9.53 | |
| #8 |  | 3.00 | 3.88 | 20.29 | 21.5 | −1.21 | 5.65 | |
| #9 |  | 4.24 | 3.71 | 27.41 | 30.0 | −2.59 | 8.62 | |
 | #10 |  | 4.00 | 4.51 | 31.44 | 34.5 | −3.06 | 8.87 |
| #11 |  | 3.00 | 4.29 | 22.43 | 24.5 | −2.07 | 8.45 | |
| #12 |  | 4.24 | 4.01 | 29.63 | 32.5 | −2.87 | 8.83 | |
 | #13 |  | 5.66 | 4.09 | 40.34 | 38.5 | 1.84 | 4.79 |
| #14 |  | 4.24 | 3.98 | 29.41 | 27.5 | 1.91 | 6.94 | |
| #15 |  | 2.83 | 4.37 | 21.55 | 23.5 | −1.95 | 8.29 | |
| #16 |  | 2.83 | 4.79 | 23.62 | 26.0 | −2.38 | 9.14 | |
| #17 |  | 3.00 | 5.53 | 28.91 | 32.0 | −3.09 | 9.65 | |
| #18 |  | 2.00 | 5.89 | 20.53 | 18.5 | 2.03 | 10.97 | |
| #19 |  | 2.83 | 6.48 | 31.96 | 30 | 1.96 | 6.53 | |
 | #20 |  | 3.00 | 4.74 | 24.78 | 27.0 | −2.22 | 8.22 |
| #21 |  | 4.24 | 4.53 | 33.47 | 37.0 | −3.53 | 9.53 | |
| #22 |  | 3.00 | 4.19 | 21.91 | 24.0 | −2.09 | 8.73 | |
| #23 |  | 2.23 | 3.98 | 15.47 | 12.0 | 3.47 | 28.89 | |
| #24 |  | 2.83 | 3.88 | 19.14 | 15.0 | 4.14 | 27.57 | |
| #25 |  | 4.24 | 4.00 | 29.56 | 32.5 | −2.94 | 9.06 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Xia, H.; Li, P.; Zhang, K.; Hong, W.; Guo, R. A Pavement Crack Detection Method via Deep Learning and a Binocular-Vision-Based Unmanned Aerial Vehicle. Appl. Sci. 2024, 14, 1778. https://doi.org/10.3390/app14051778
Zhang J, Xia H, Li P, Zhang K, Hong W, Guo R. A Pavement Crack Detection Method via Deep Learning and a Binocular-Vision-Based Unmanned Aerial Vehicle. Applied Sciences. 2024; 14(5):1778. https://doi.org/10.3390/app14051778
Chicago/Turabian StyleZhang, Jiahao, Haiting Xia, Peigen Li, Kaomin Zhang, Wenqing Hong, and Rongxin Guo. 2024. "A Pavement Crack Detection Method via Deep Learning and a Binocular-Vision-Based Unmanned Aerial Vehicle" Applied Sciences 14, no. 5: 1778. https://doi.org/10.3390/app14051778
APA StyleZhang, J., Xia, H., Li, P., Zhang, K., Hong, W., & Guo, R. (2024). A Pavement Crack Detection Method via Deep Learning and a Binocular-Vision-Based Unmanned Aerial Vehicle. Applied Sciences, 14(5), 1778. https://doi.org/10.3390/app14051778