
Improved SE-ResNet Acoustic–Vibration Fusion for Rolling Bearing Composite Fault Diagnosis

Abstract
:Featured Application
Abstract
1. Introduction
2. Methods
2.1. GS-SVR-EEMD with Window Function
- (1)
- Determine the range of the optimization search for GS.
- (2)
- Determine the step size. A grid is constructed based on the varying directions of growth for the parameters. The nodes within this grid represent the corresponding parameter sets.
- (3)
- Iterate over each parameter in the range to be searched and take a series of discrete values for each. Train the model by taking all combinations of the values for the parameters to be tested, respectively.
- (4)
- The parameters that give the best results in training the model are chosen as the optimal parameter set.
- (5)
- The optimal parameters obtained are substituted into the SVR model.
- (1)
- The aforementioned GS-SVR-EEMD method, incorporating a window function, is employed to decompose the original signal, yielding a sequence of IMF components along with residual signals.
- (2)
- The correlation coefficient between each IMF component and the original signal is calculated.
- (3)
- At the first local maximum in the difference of the correlation coefficients, the preceding IMF component is eliminated.
- (4)
- Singular value decomposition noise reduction is conducted for the remaining IMF components.
- (5)
- The processed signal data is obtained by accumulating the IMF components after noise reduction.
2.2. Low-Rank Multimodal Fusion
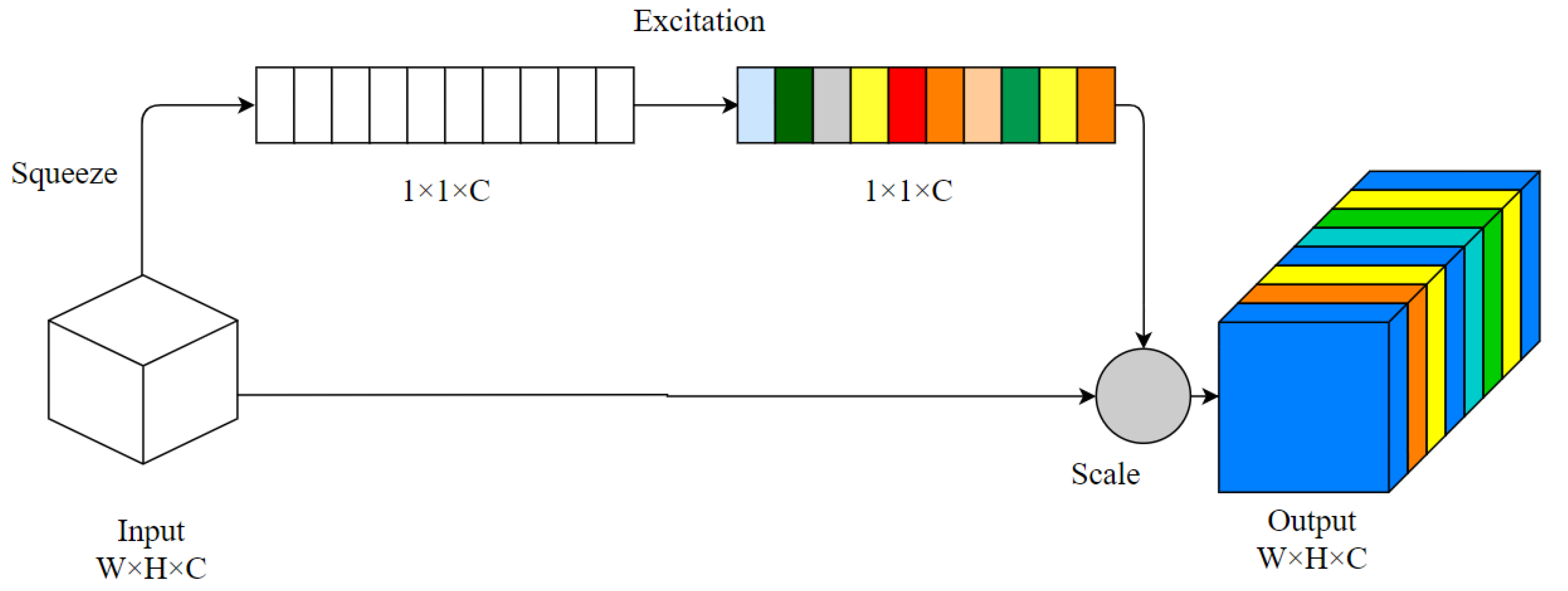
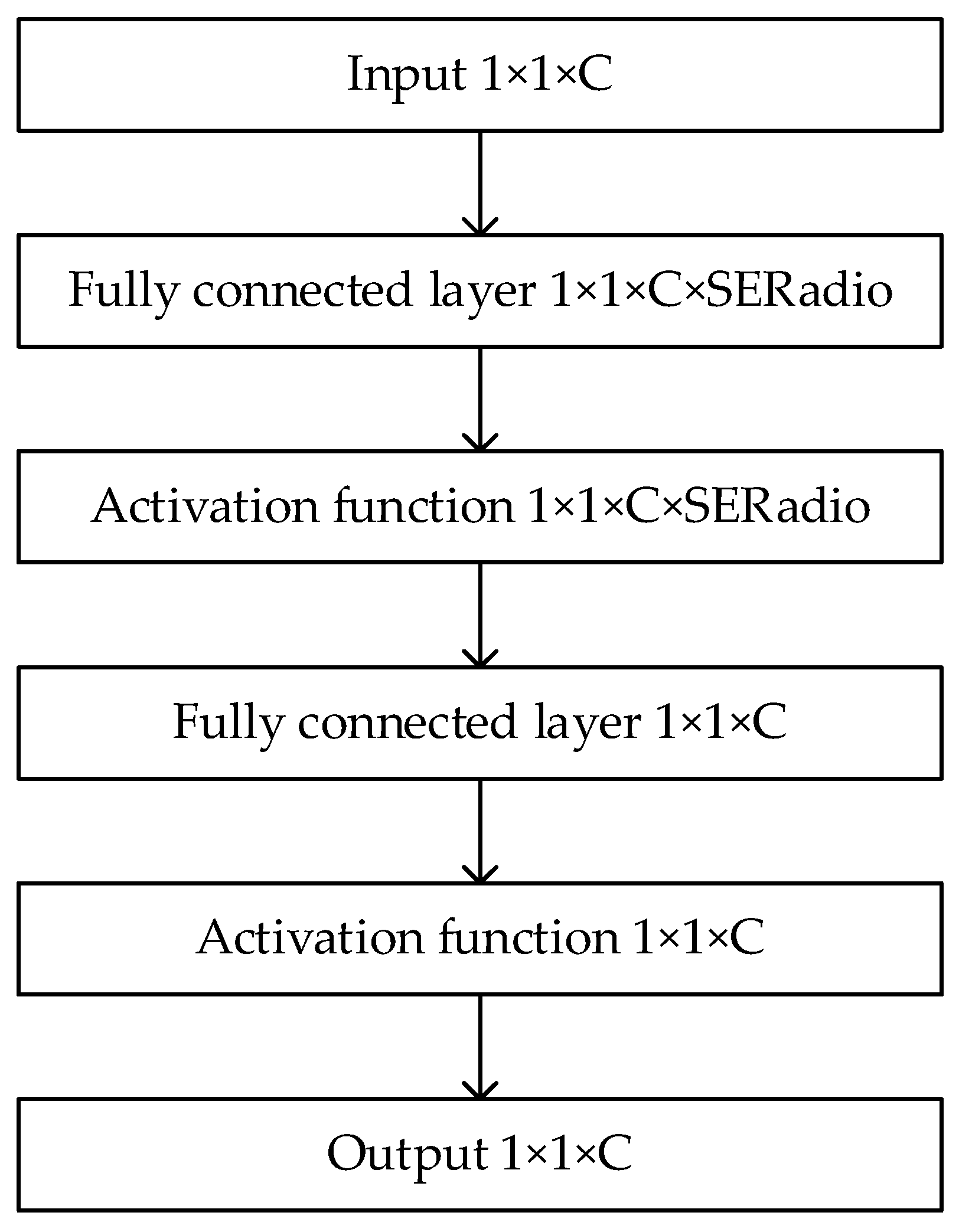
2.3. Improved SE-ResNet
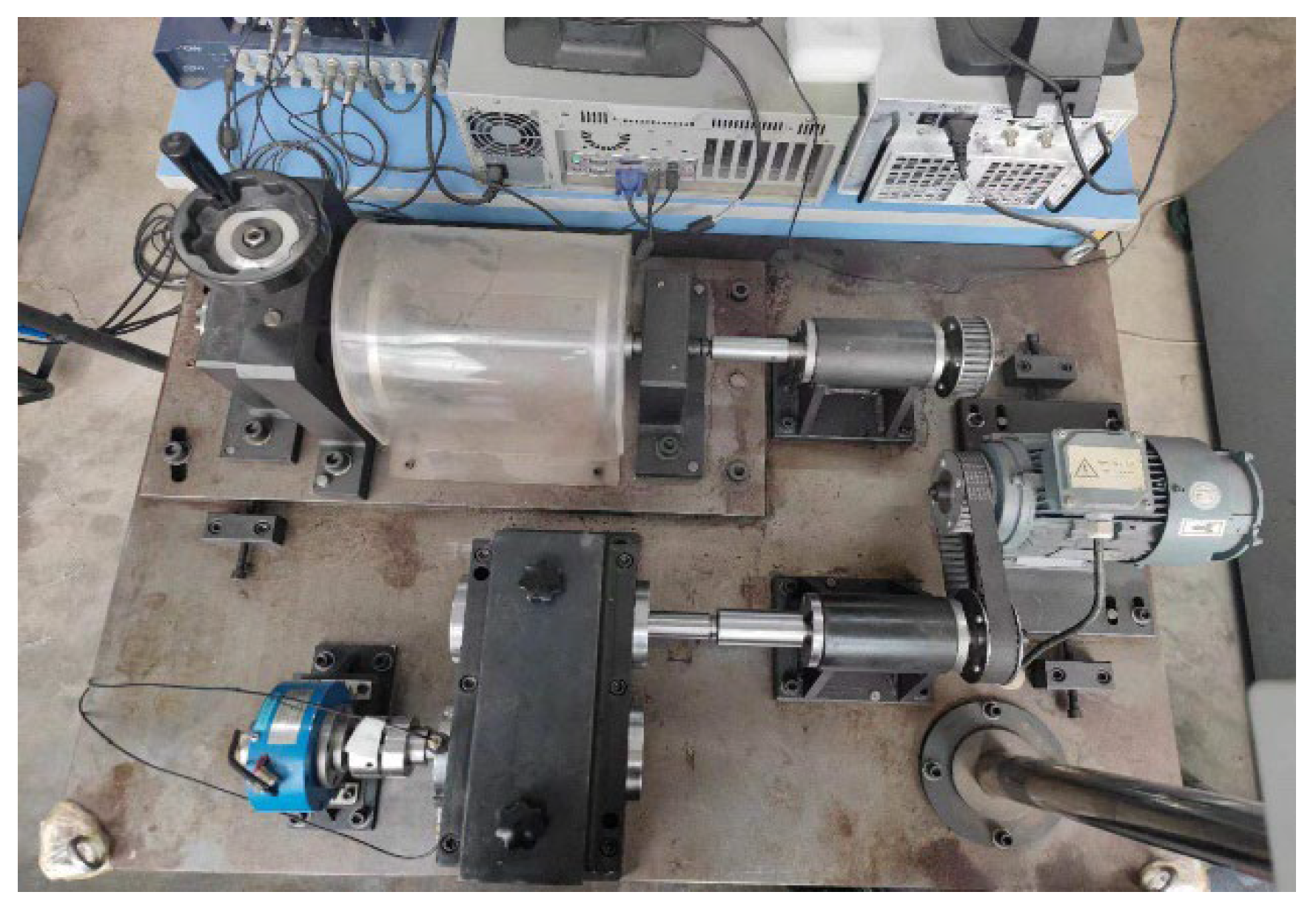
3. Test Verification
3.1. Data Preprocessing
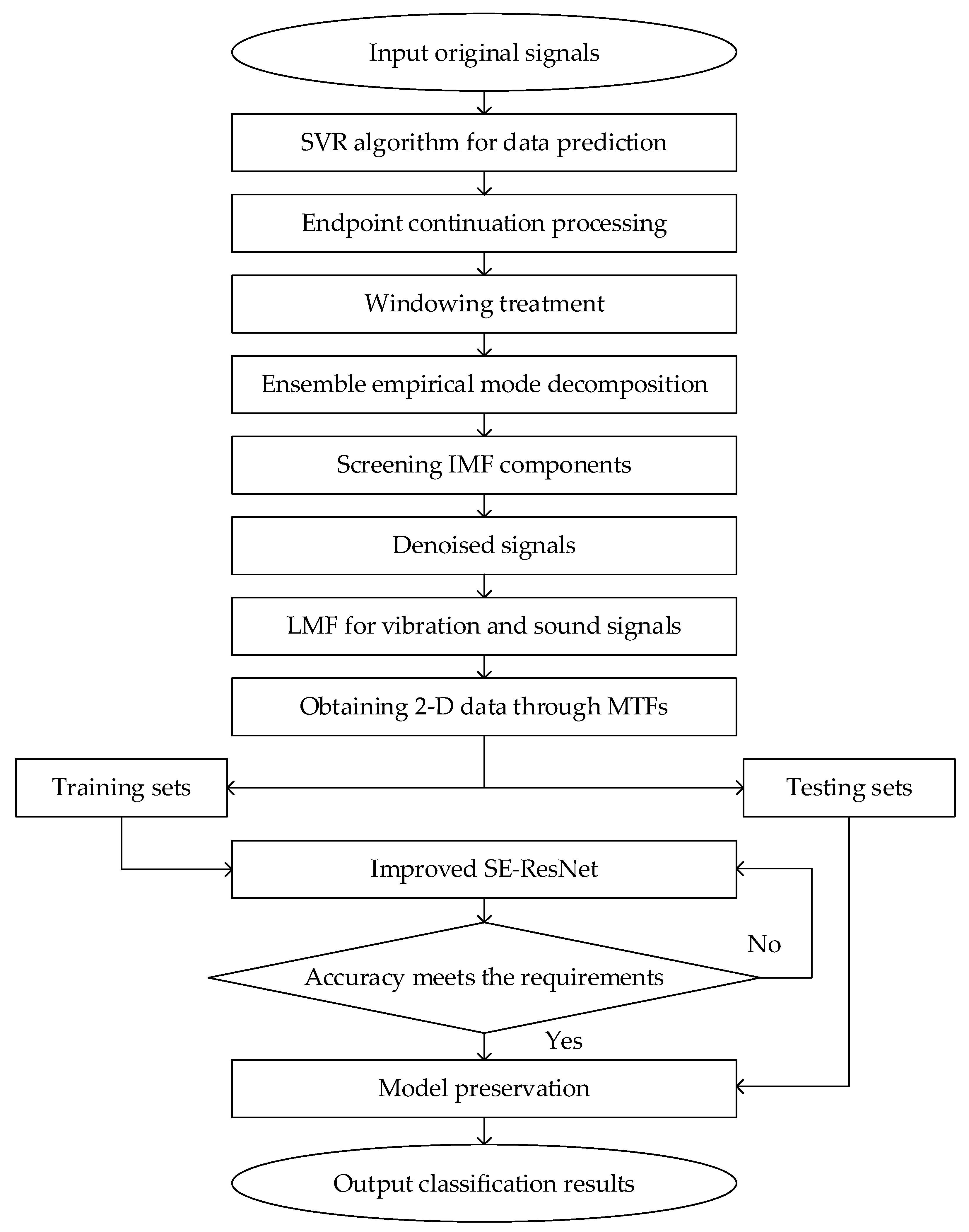
3.2. Experimental Method
- (1)
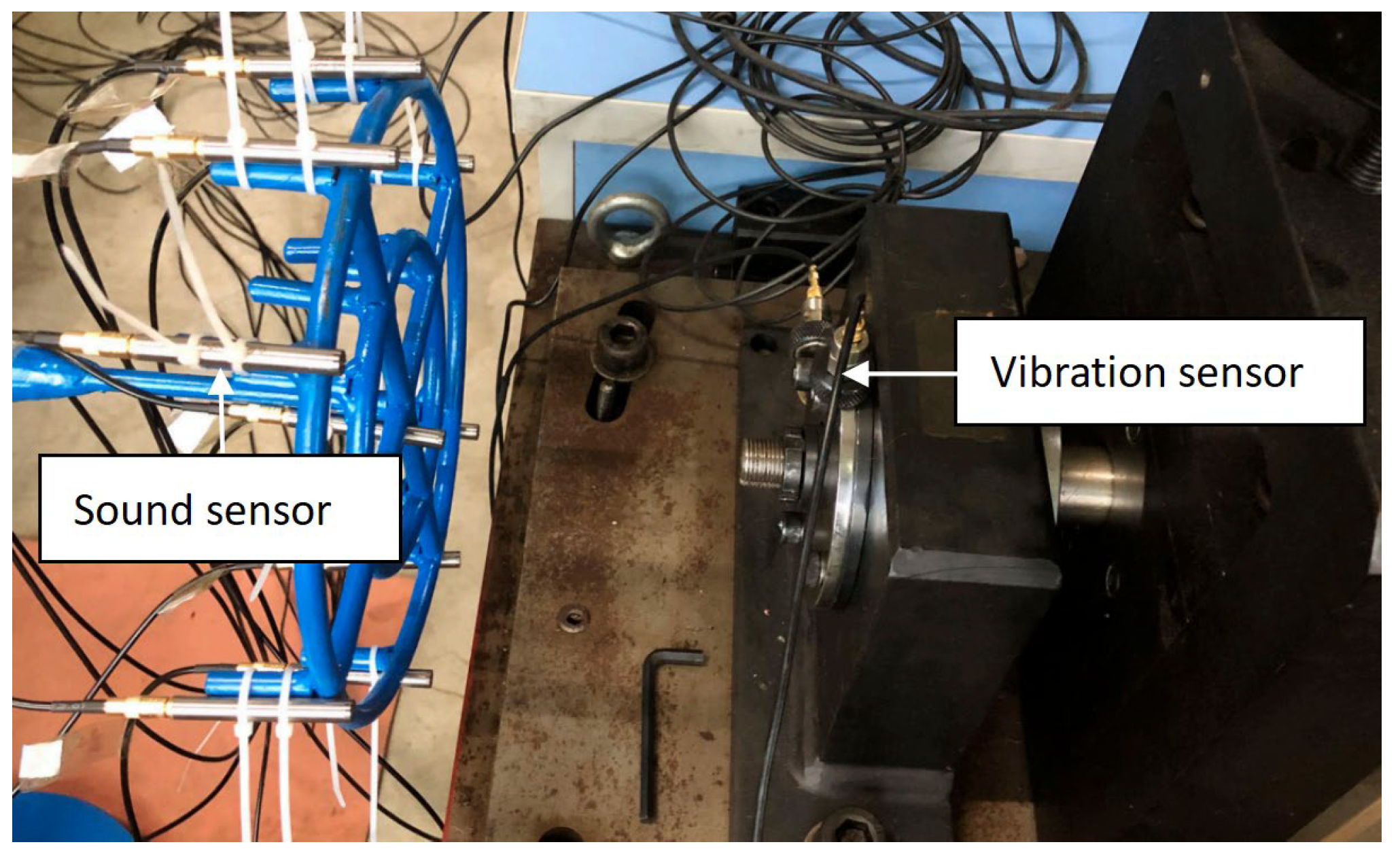
- We gathered sound and vibration signals from rolling bearings under different failure forms.
- (2)
- The acquired signals were subjected to GS-SVR-EEMD noise reduction, respectively, and the effective eigenmode components were outputted.
- (3)
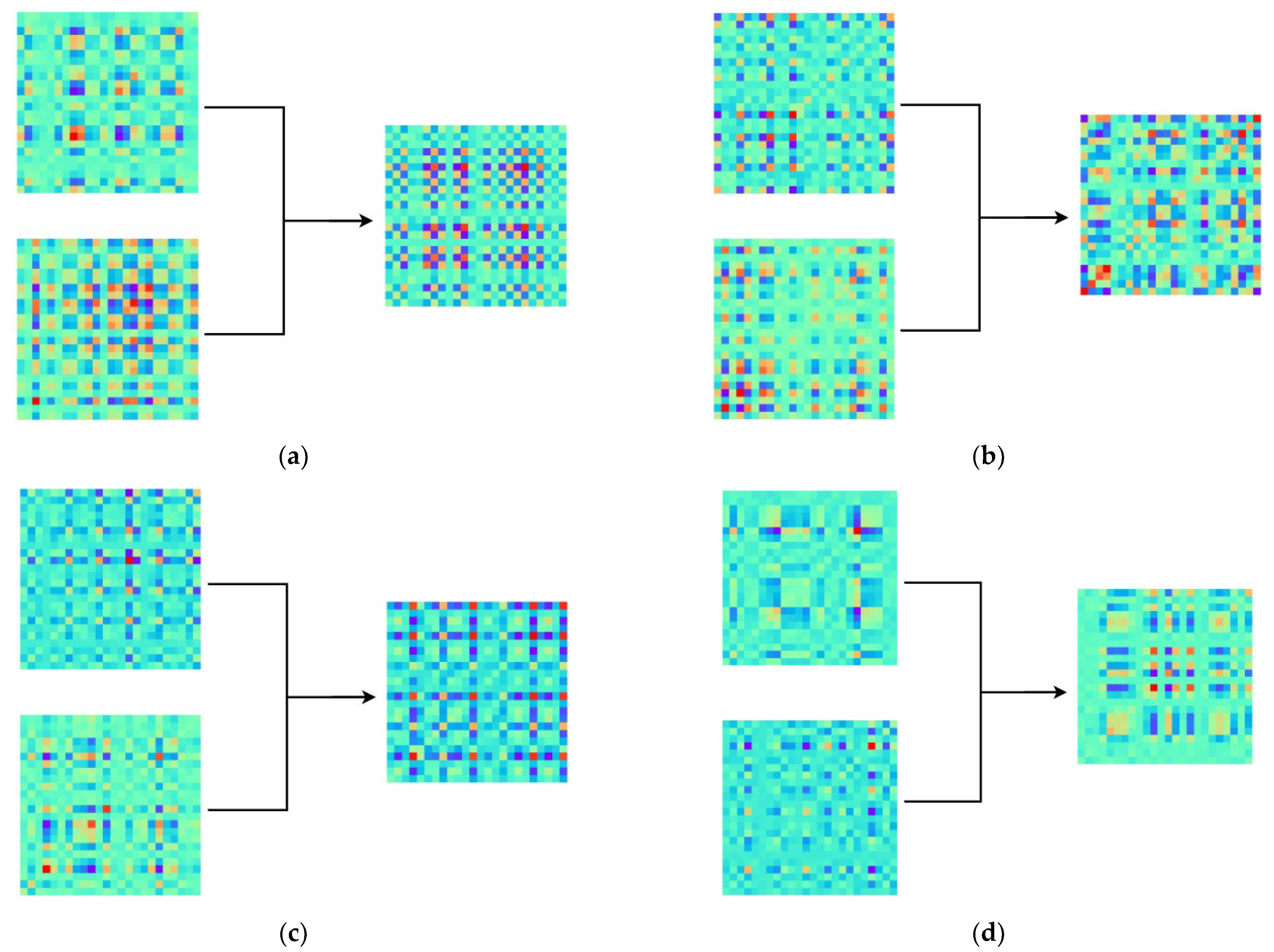
- The obtained intrinsic modal components were summed. The processed sound and data signals were obtained. The sound and vibration signals were then subjected to low-rank multimodal fusion.
- (4)
- The abnormal situations of the sound vibration fusion dataset were checked. Z-score standardization was used to identify abnormal situations. Samples containing anomalies were deleted. The fused signal was converted to a 2D color image by Markov transition fields (MTFs).
- (5)
- The acquired 2D color images were partitioned into a validation set and a test set in a 3:7 ratio.
- (6)
- The segmented dataset was subjected to feature classification and recognition using the improved SE-ResNet network.
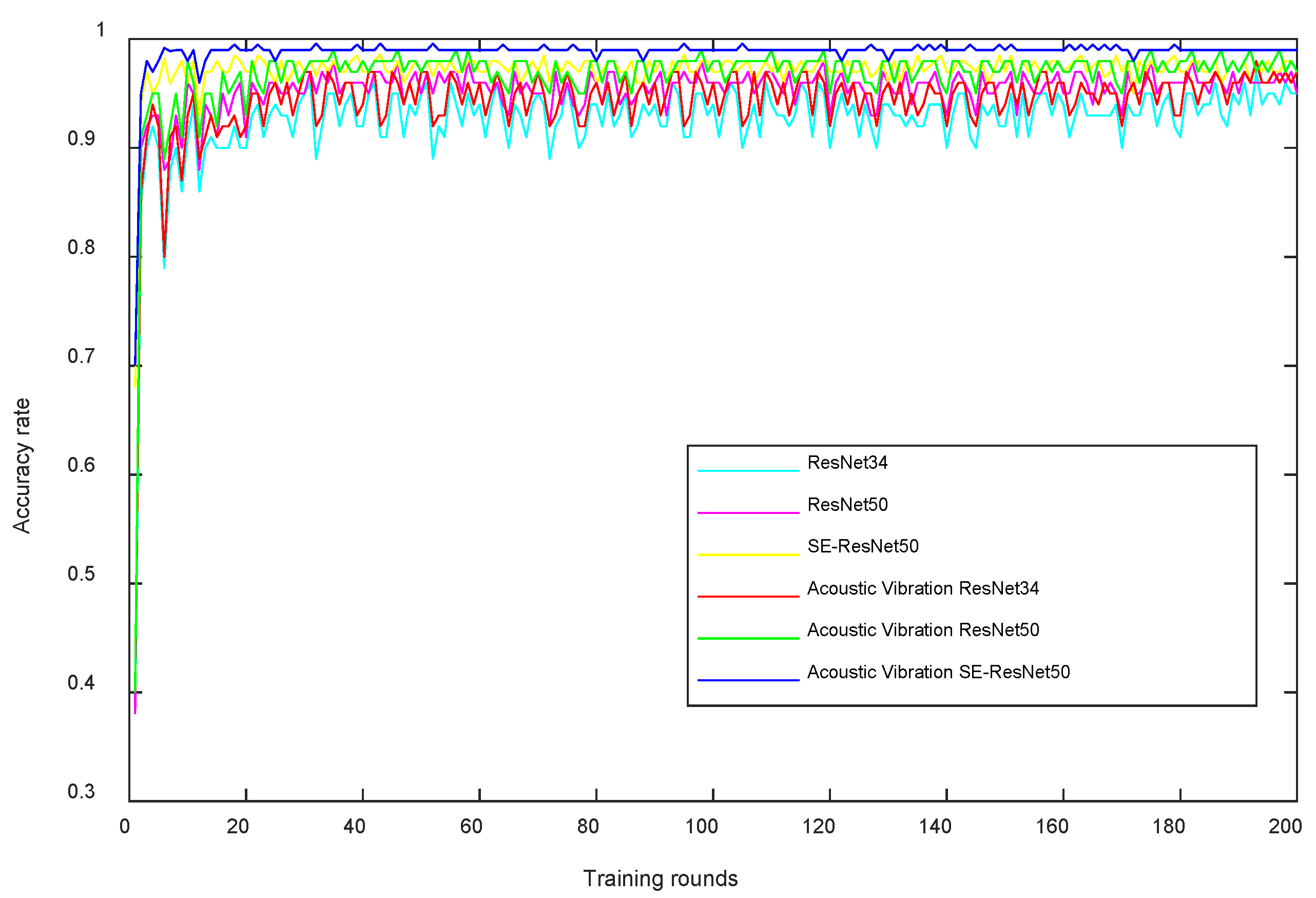
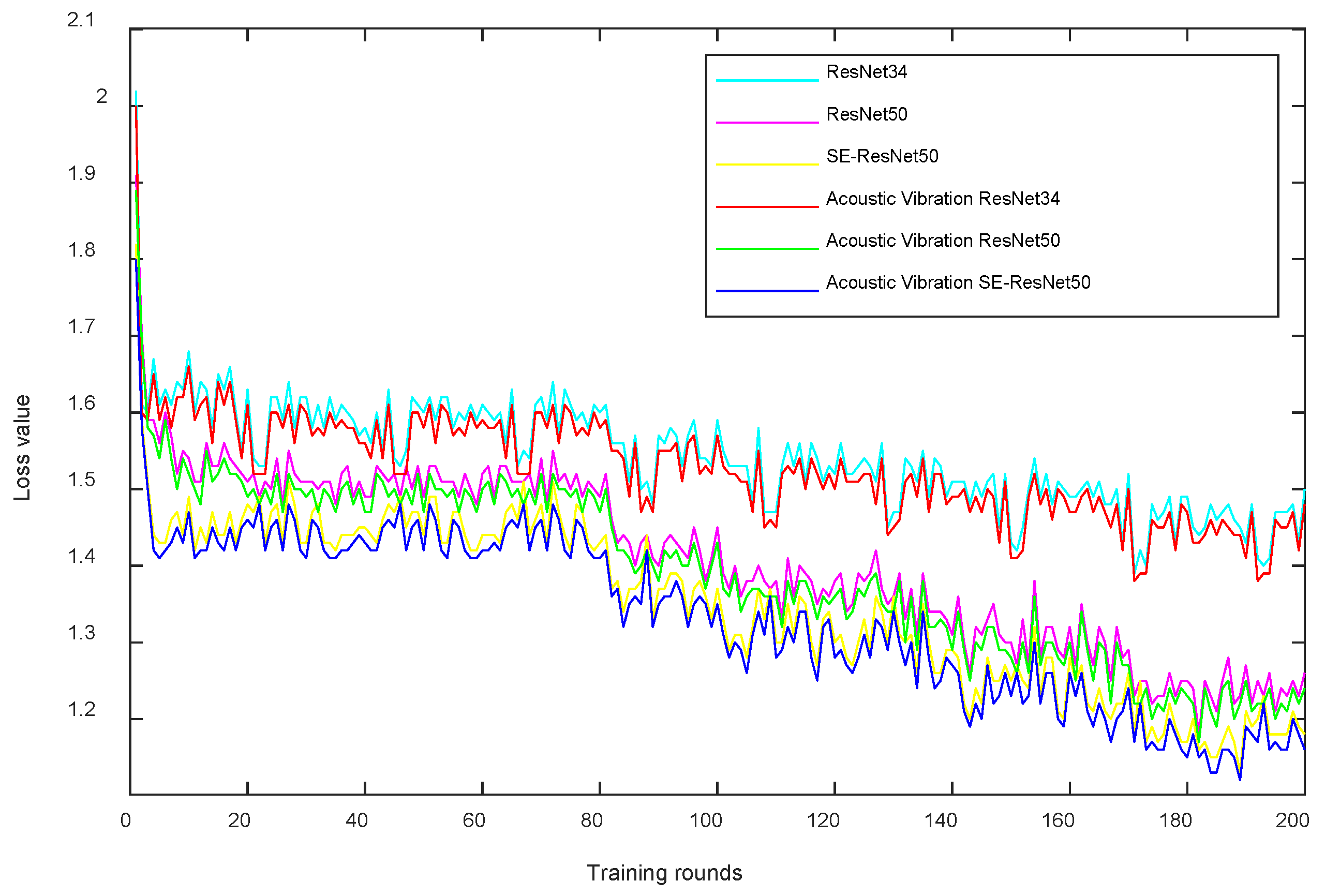
4. Results and Discussion
5. Conclusions
- (1)
- An improved EEMD method based on GS-SVR with a window function was used for noise reduction of the original signal. The singular value method was used to filter and reconstruct the decomposed IMF components. The pre-processing made the signal easier to analyze.
- (2)
- The data were converted from Markov variation fields to a 2D image, which facilitated feature recognition by a convolutional neural network. The introduction of SE in the ResNet50 network yielded a great accuracy improvement with a small amount of computation.
- (3)
- The LMF method was utilized to obtain the sound and vibration signal modal correlation features, and the inter-modal interrelationships were considered. The sophistication of the improved SE-ResNet method for composite fault diagnosis of rolling bearings was demonstrated experimentally.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jose, E.R.; Jose, A.A.; Claudia, M. Comprehensive diagnosis of localized rolling bearing faults during rotating machine start-up via vibration envelope analysis. Electronics 2024, 13, 375. [Google Scholar]
- Sumika, C.; Govind, V.; Rajesh, K.; Radoslaw, Z.; Munish, K.G.; Pradeep, K. An adaptive feature mode decomposition based on a novel health indicator for bearing fault diagnosis. Measurement 2024, 226, 114191. [Google Scholar]
- Gu, H.; Liu, W.; Gao, Q.; Zhang, Y. A review on wind turbines gearbox fault diagnosis methods. J. Vibroeng. 2021, 3, 26–43. [Google Scholar] [CrossRef]
- Vidal-Puig, S.; Vitale, R.; Ferrer, A. Data-driven supervised fault diagnosis methods based on latent variable models: A comparative study. Chemom. Intell. Lab. Syst. 2019, 187, 41–52. [Google Scholar] [CrossRef]
- Wang, K.; Gao, B.; Shan, S.; Wang, R.; Wang, X. Research on rolling bearing fault diagnosis method based on ECA-MRANet. Appl. Sci. 2024, 14, 551. [Google Scholar] [CrossRef]
- Tian, Y.; Pan, G. An unsupervised regularization and dropout based deep neural network and its application for thermal error prediction. Appl. Sci. 2020, 10, 2870. [Google Scholar] [CrossRef]
- Gu, X.; Xie, Y.; Tian, Y.; Liu, T. A light weight neural network based on GAF and ECA for bearing fault diagnosis. Metals 2023, 13, 822. [Google Scholar] [CrossRef]
- Mao, W.; He, J.; Li, Y.; Yan, Y. Bearing fault diagnosis with auto-encoder extreme learning machine: A comparative study. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 231, 1560–1578. [Google Scholar] [CrossRef]
- Saucedo-Dorantes, J.; Arellano-Espitia, F.; Delgado-Prieto, M.; Osornio-Rios, R.A. Diagnosis methodology based on deep feature learning for fault identification in metallic, Hybrid and Ceramic Bearings. Sensors 2021, 21, 5832. [Google Scholar] [CrossRef]
- Zeng, M.; Li, S.; Li, R.; Lu, J.; Xu, K.; Li, X.; Wang, Y.; Du, J. A hierarchical sparse discriminant autoencoder for bearing fault diagnosis. Appl. Sci. 2022, 12, 818. [Google Scholar] [CrossRef]
- Liang, P.; Wang, W.; Yuan, X.; Liu, S.; Zhang, L.; Cheng, Y. Intelligent fault diagnosis of rolling bearing based on wavelet transform and improved ResNet under noisy labels and environment. Eng. Appl. Artif. Intell. 2022, 115, 105269. [Google Scholar] [CrossRef]
- Tao, H.; Wang, P.; Chen, Y.; Stojanovic, V.; Yang, H. An unsupervised fault diagnosis method for rolling bearing using STFT and generative neural networks. J. Frankl. Inst. 2020, 357, 7286–7307. [Google Scholar] [CrossRef]
- Yang, S.; Yang, P.; Yu, H.; Bai, J.; Feng, W.; Su, Y.; Si, Y. A 2DCNN-RF model for offshore wind turbine high-speed bearing-fault diagnosis under noisy environment. Energies 2022, 15, 3340. [Google Scholar] [CrossRef]
- Chen, Z.; Gryllias, K.; Li, W. Mechanical fault diagnosis using convolutional neural networks and extreme learning machine. Mech. Syst. Signal Process. 2019, 133, 106272. [Google Scholar] [CrossRef]
- Pham, M.T.; Kim, J.M.; Kim, C.H. Deep learning-based bearing fault diagnosis method for embedded systems. Sensors 2020, 20, 6886. [Google Scholar] [CrossRef]
- Zhou, Z.; Wang, H.; Li, Z.; Chen, W. Fault diagnosis of rolling bearing based on deep convolutional neural network and gated recurrent unit. J. Adv. Mech. Des. Syst. Manuf. 2023, 17, JAMDSM0017. [Google Scholar] [CrossRef]
- Lei, X.; Lu, N.; Chen, C.; Wang, C. An AVMD-DBN-ELM model for bearing fault diagnosis. Sensors 2022, 22, 9369. [Google Scholar] [CrossRef] [PubMed]
- Jin, T.; Yan, C.; Chen, C.; Yang, Z.; Tian, H.; Wang, S. Light neural network with fewer parameters based on CNN for fault diagnosis of rotating machinery. Measurement 2021, 181, 109639. [Google Scholar] [CrossRef]
- Khorram, A.; Khalooei, M.; Rezghi, M. End-to-end CNN + LSTM deep learning approach for bearing fault diagnosis. Appl. Intell. 2021, 51, 736–751. [Google Scholar] [CrossRef]
- Hoang, D.T.; Tran, X.T.; Van, M.; Kang, H.J. A deep Neural Network-Based feature fusion for bearing fault diagnosis. Sensors 2021, 21, 244. [Google Scholar] [CrossRef]
- Han, H.; Xue, C.; Ma, J.; Cao, X.; Zhang, X. A novel intelligent diagnosis method of rolling bearing and rotor composite faults based on vibration signal-to-image mapping and CNN-SVM. Meas. Sci. Technol. 2023, 34, 044008. [Google Scholar]
- An, Z.; Wu, F.; Zhang, C.; Ma, J.; Sun, B.; Tang, B.; Liu, Y. Deep learning-based composite fault diagnosis. IEEE J. Emerg. Sel. Top. Circuits Syst. 2023, 13, 572–581. [Google Scholar] [CrossRef]
- Zhao, Y.; Fan, Y.; Li, H.; Gao, X. Rolling bearing composite fault diagnosis method based on EEMD fusion feature. J. Mech. Sci. Technol. 2022, 36, 4563–4570. [Google Scholar] [CrossRef]
- Cheng, J.; Yang, Y.; Shao, H.; Pan, H.; Zheng, J.; Cheng, J. Enhanced periodic mode decomposition and its application to composite fault diagnosis of rolling bearings. ISA Trans. 2022, 125, 474–491. [Google Scholar] [CrossRef]
- Liu, Z.; Shen, Y.; Lakshminarasimhan, V.B.; Liang, P.P.; Bagher Zadeh, A.; Morency, L.P. Efficient low-rank multimodal fusion with modality-specific factors. arXiv 2018, arXiv:180600064. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer Name | Output Size | 50-Layer |
|---|---|---|
| conv1 | , 64, stride2 | |
| conv2_x | max pool, stride2 | |
| conv3_x | ||
| conv4_x | ||
| conv5_x | 3 | |
| Average pool, 1000-d fc, softmax | ||
| FLOPs | ||
| Pitch Diameter | Ball Diameter | Ball Number | Contact Angle |
|---|---|---|---|
| 39 mm | 7.5 mm | 13 | 0° |
| Input Signal Type | Bearing Status | ResNet34 | ResNet50 | SE-ResNet50 | VGG-16 | AlexNet |
|---|---|---|---|---|---|---|
| Feature Classification for Vibration Signal | Normal State | 98.03% | 98.61% | 99.20% | 94.22% | 92.34% |
| Inner Ring Fault | 97.41% | 98.42% | 98.52% | 93.82% | 91.72% | |
| Outer Ring Fault | 97.52% | 98.3% | 99.43% | 94.03% | 91.63% | |
| Composite Fault | 97.86% | 98.47% | 99.31% | 93.16% | 91.02% | |
| Runtime/s | 12 | 13 | 13 | 25 | 15 | |
| Feature Classification for Acoustic–Vibration Fusion | Normal State | 98.64% | 98.79% | 99.73% | 95.12% | 92.77% |
| Inner Ring Fault | 98.66% | 99.42% | 99.62% | 95.76% | 92.51% | |
| Outer Ring Fault | 98.31% | 98.74% | 99.81% | 95.54% | 91.84% | |
| Composite Fault | 98.29% | 99.15% | 99.50% | 94.79% | 91.43% | |
| Runtime/s | 11 | 13 | 13 | 25 | 15 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, X.; Tian, Y.; Li, C.; Wei, Y.; Li, D. Improved SE-ResNet Acoustic–Vibration Fusion for Rolling Bearing Composite Fault Diagnosis. Appl. Sci. 2024, 14, 2182. https://doi.org/10.3390/app14052182
Gu X, Tian Y, Li C, Wei Y, Li D. Improved SE-ResNet Acoustic–Vibration Fusion for Rolling Bearing Composite Fault Diagnosis. Applied Sciences. 2024; 14(5):2182. https://doi.org/10.3390/app14052182
Chicago/Turabian StyleGu, Xiaojiao, Yang Tian, Chi Li, Yonghe Wei, and Dashuai Li. 2024. "Improved SE-ResNet Acoustic–Vibration Fusion for Rolling Bearing Composite Fault Diagnosis" Applied Sciences 14, no. 5: 2182. https://doi.org/10.3390/app14052182