
A Drag Force Model of Vertical Penetration into a Granular Medium Based on DEM Simulations and Experiments

Abstract
:1. Introduction
2. Numerical Model and Methodology
3. Experimental and Numerical Setup
4. Results and Discussion
4.1. Experimental Results
4.2. Influence of Key Parameters
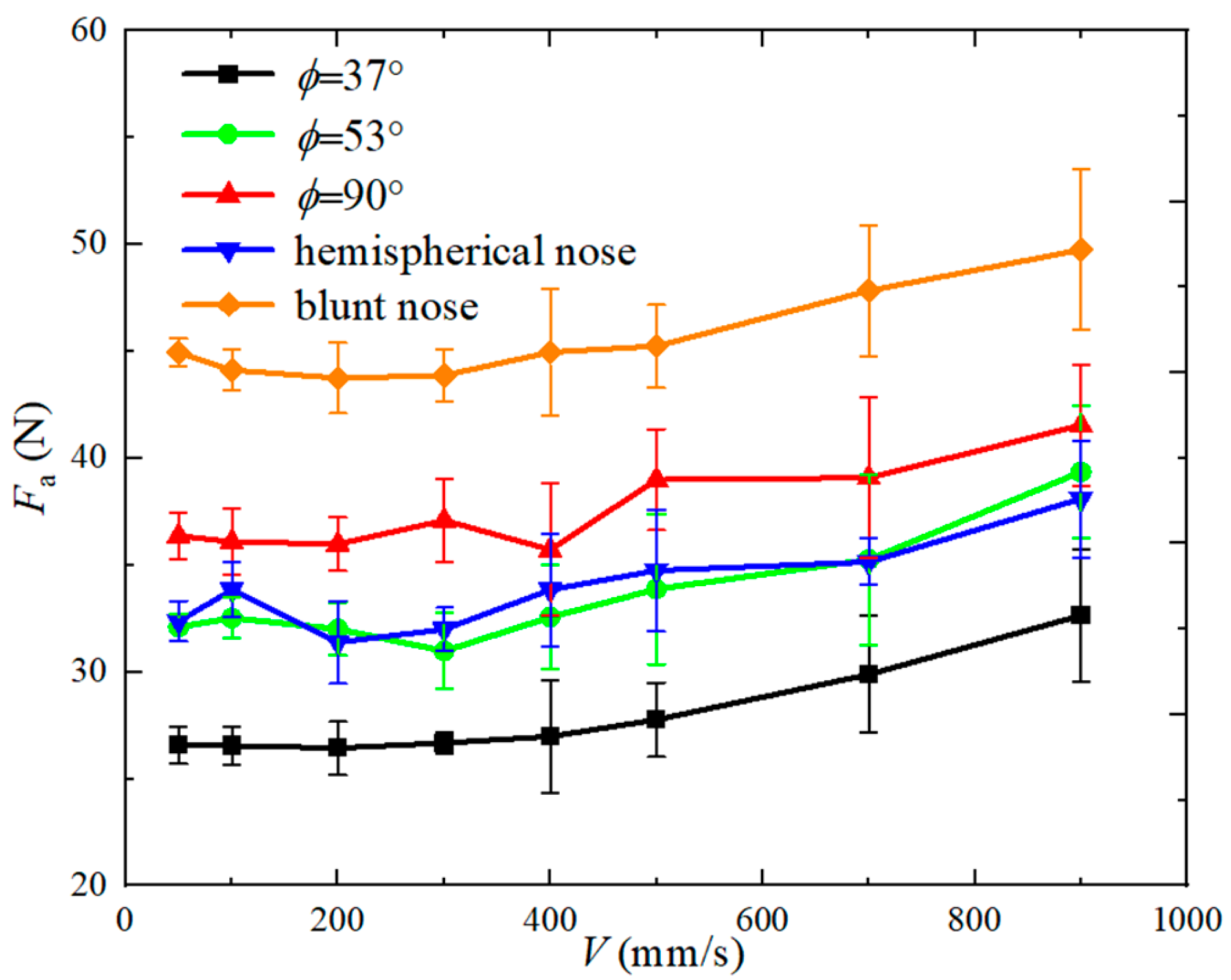
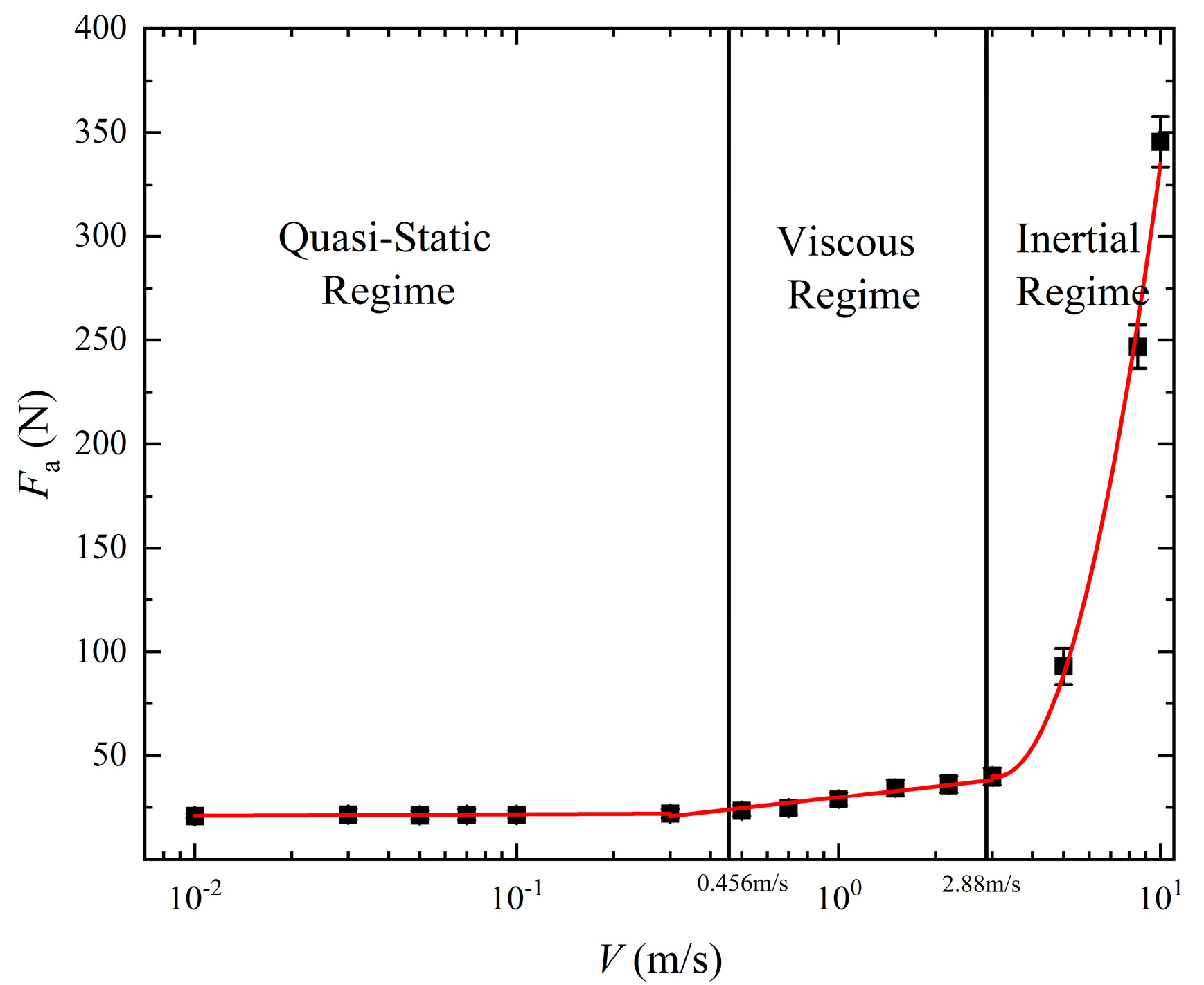
4.2.1. Penetrating Velocity
4.2.2. Diameter of Particle
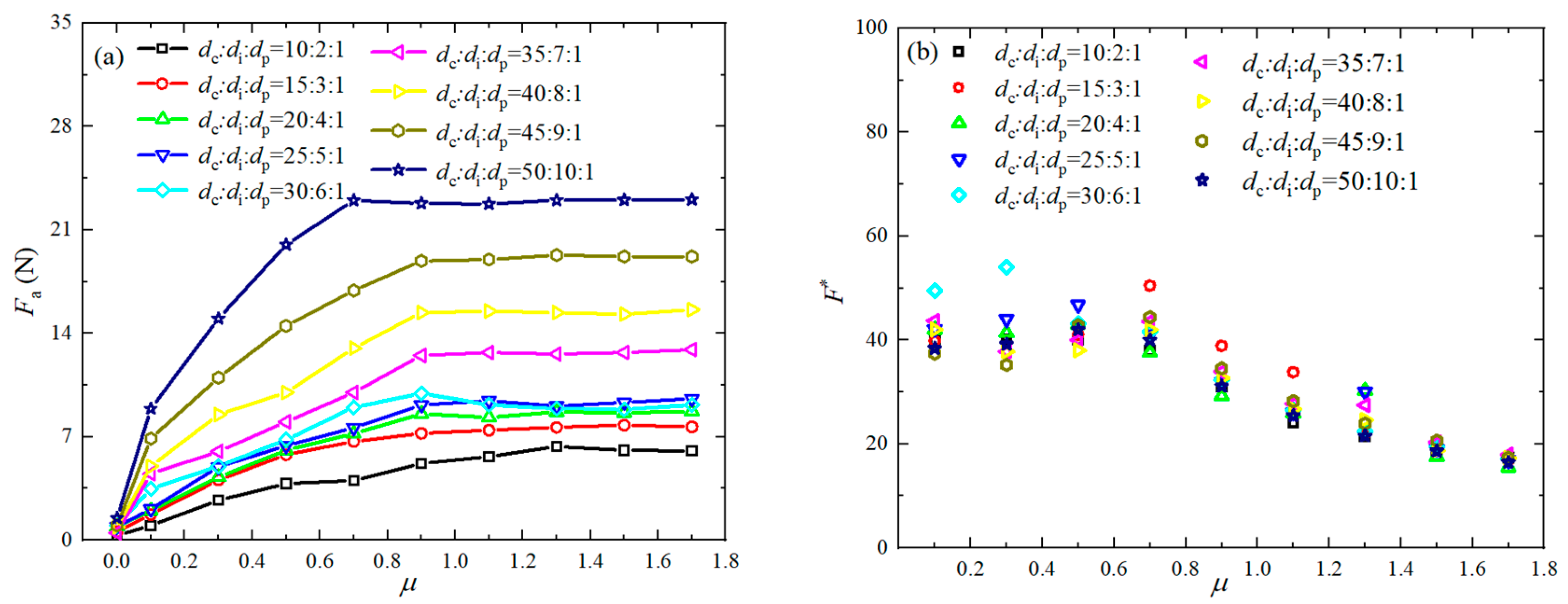
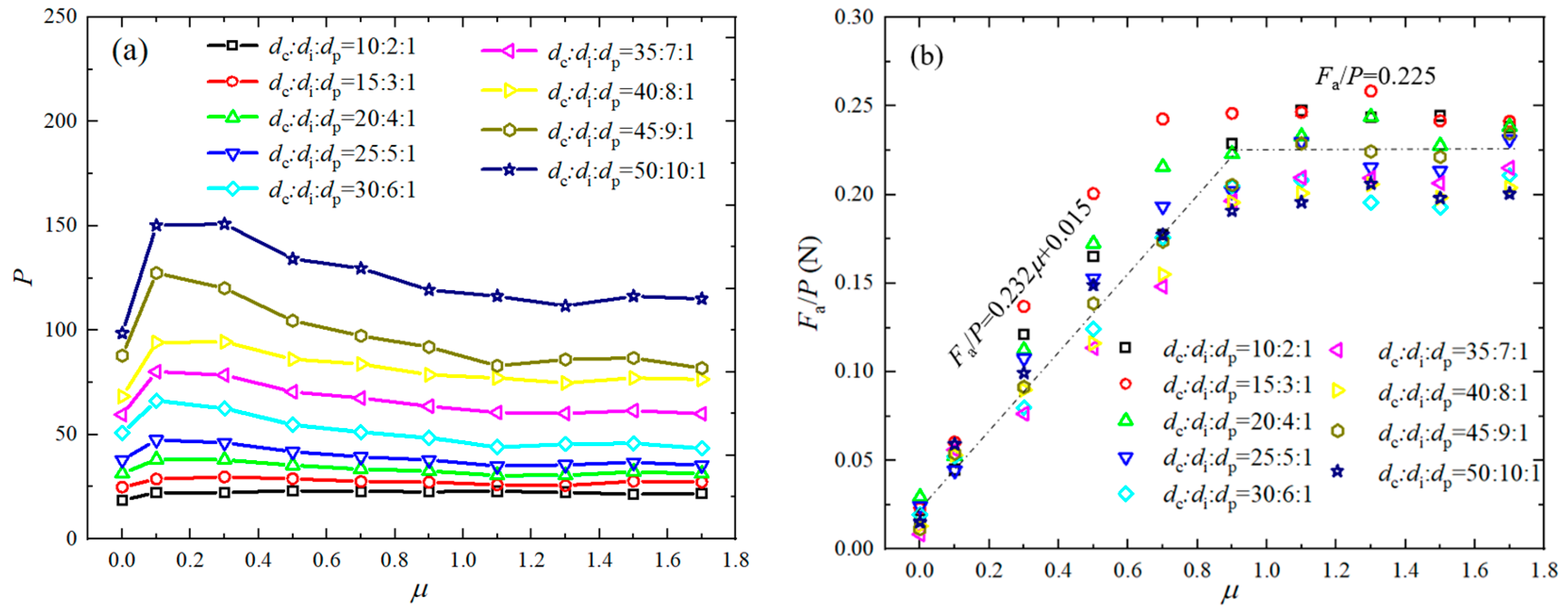
4.2.3. The Combined Influence of di and
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Meroz, Y.; Meade, B.J. Intermittent Granular Dynamics at a Seismogenic Plate Boundary. Phys. Rev. Lett. 2017, 119, 138501. [Google Scholar] [CrossRef] [PubMed]
- Zhu, S.; Ji, T.; Niu, D.; Yang, Z. Investigation of PEG/mixed metal oxides as a new form-stable phase change material for thermoregulation and improved UV ageing resistance of bitumen. RSC Adv. 2020, 10, 44903–44911. [Google Scholar] [CrossRef] [PubMed]
- Tsuji, D.; Otsuki, M.; Katsuragi, H. Laboratory experiment and discrete-element-method simulation of granular-heap flows under vertical vibration. Phys. Rev. E 2019, 99, 062902. [Google Scholar] [CrossRef]
- Treers, L.K.; Cao, C.; Stuart, H.S. Granular Resistive Force Theory Implementation for Three-Dimensional Trajectories. IEEE Robot. Autom. Lett. 2021, 6, 1887–1894. [Google Scholar] [CrossRef]
- Zhou, L.; Zhang, L.; Bai, L.; Shi, W.; Li, W.; Wang, C.; Agarwal, R. Experimental study and transient CFD/DEM simulation in a fluidized bed based on different drag models. RSC Adv. 2017, 7, 12764–12774. [Google Scholar] [CrossRef]
- Naclerio, N.D.; Karsai, A.; Murray-Cooper, M.; Ozkan-Aydin, Y.; Aydin, E.; Goldman, D.I.; Hawkes, E.W. Controlling subterranean forces enables a fast, steerable, burrowing soft robot. Sci. Robot. 2021, 6, eabe2922. [Google Scholar] [CrossRef] [PubMed]
- Yankelevsky, D.Z.; Feldgun, V.R.; Karinski, Y.S. The optimal nose shape of a rigid projectile deeply penetrating into a solid target considering friction. Int. J. Impact Eng. 2022, 162, 104157. [Google Scholar] [CrossRef]
- Yankelevsky, D.Z.; Feldgun, V.R.; Karinski, Y.S. The false nose shape in a high velocity projectile penetration into dry sand. Int. J. Impact Eng. 2023, 177, 104492. [Google Scholar] [CrossRef]
- Feldgun, V.R.; Yankelevsky, D.Z. The optimal nose shape of a projectile penetrating into targets described by a locked hydrostat and a linear shear failure relationship. Int. J. Solids Struct. 2020, 200–201, 119–131. [Google Scholar] [CrossRef]
- Glößner, C.; Moser, S.; Külls, R.; Heß, S.; Nau, S.; Salk, M.; Penumadu, D.; Petrinic, N. Instrumented Projectile Penetration Testing of Granular Materials. Exp. Mech. 2016, 57, 261–272. [Google Scholar] [CrossRef]
- Chian, S.C.; Tan, B.C.V.; Sarma, A. Projectile penetration into sand: Relative density of sand and projectile nose shape and mass. Int. J. Impact Eng. 2017, 103, 29–37. [Google Scholar] [CrossRef]
- Collins, A.L.; Addiss, J.W.; Walley, S.M.; Promratana, K.; Bobaru, F.; Proud, W.G.; Williamson, D.M. The effect of rod nose shape on the internal flow fields during the ballistic penetration of sand. Int. J. Impact Eng. 2011, 38, 951–963. [Google Scholar] [CrossRef]
- Omidvar, M.; Iskander, M.; Bless, S. Response of granular media to rapid penetration. Int. J. Impact Eng. 2014, 66, 60–82. [Google Scholar] [CrossRef]
- Brzinski, T.A.; Mayor, P.; Durian, D.J. Depth-Dependent Resistance of Granular Media to Vertical Penetration. Phys. Rev. Lett. 2013, 111, 168002. [Google Scholar] [CrossRef] [PubMed]
- Aguilar, J.; Goldman, D.I. Robophysical study of jumping dynamics on granular media. Nat. Phys. 2015, 12, 278–283. [Google Scholar] [CrossRef]
- Feng, Y.; Blumenfeld, R.; Liu, C. Support of modified Archimedes’ law theory in granular media. Soft Matter 2019, 15, 3008–3017. [Google Scholar] [CrossRef]
- Katsuragi, H.; Durian, D.J. Unified force law for granular impact cratering. Nat. Phys. 2007, 3, 420–423. [Google Scholar] [CrossRef]
- Seguin, A.; Gondret, P. Drag force in a cold or hot granular medium. Phys. Rev. E 2017, 96, 032905. [Google Scholar] [CrossRef]
- Umbanhowar, P.; Goldman, D.I. Granular impact and the critical packing state. Phys. Rev. E 2010, 82, 010301. [Google Scholar] [CrossRef]
- Zhang, C.; Ye, X. Force and flow characteristics of an intruder immersed in 3D dense granular matter. Particuology 2022, 71, 47–55. [Google Scholar] [CrossRef]
- Abbasi Aghda, S.; Naji, A. Drag force on cylindrical intruders in granular media: Experimental study of lateral vs axial intrusion and high grain-size polydispersity. Powder Technol. 2023, 415, 118194. [Google Scholar] [CrossRef]
- Ambroso, M.A.; Kamien, R.D.; Durian, D.J. Dynamics of shallow impact cratering. Phys. Rev. E 2005, 72, 041305. [Google Scholar] [CrossRef] [PubMed]
- Goldman, D.I.; Umbanhowar, P. Scaling and dynamics of sphere and disk impact into granular media. Phys. Rev. E 2008, 77, 021308. [Google Scholar] [CrossRef]
- Li, C.; Zhang, T.; Goldman, D.I. A Terradynamics of Legged Locomotion on Granular Media. Science 2013, 339, 1408–1412. [Google Scholar] [CrossRef] [PubMed]
- Roth, L.K.; Han, E.; Jaeger, H.M. Intrusion into Granular Media Beyond the Quasistatic Regime. Phys. Rev. Lett. 2021, 126, 218001. [Google Scholar] [CrossRef] [PubMed]
- Roth, L.K. Constant speed penetration into granular materials: Drag forces from the quasistatic to inertial regime. Granul. Matter 2021, 23, 54. [Google Scholar] [CrossRef]
- Zik, O.; Stavans, J.; Rabin, Y. Mobility of a Sphere in Vibrated Granular Media. Europhys. Lett. EPL 1992, 17, 315–319. [Google Scholar] [CrossRef]
- Pongó, T.; Stiga, V.; Török, J.; Lévay, S.; Szabó, B.; Stannarius, R.; Hidalgo, R.C.; Börzsönyi, T. Flow in an hourglass: Particle friction and stiffness matter. New J. Phys. 2021, 23, 023001. [Google Scholar] [CrossRef]
- Duan, Y.; Feng, Z.-G. Incorporation of velocity-dependent restitution coefficient and particle surface friction into kinetic theory for modeling granular flow cooling. Phys. Rev. E 2017, 96, 062907. [Google Scholar] [CrossRef]
- Thornton, C. Numerical simulations of deviatoric shear deformation of granular media. Géotechnique 2000, 50, 43–53. [Google Scholar] [CrossRef]
- Senetakis, K.; Coop, M.R.; Todisco, M.C. Tangential load–deflection behaviour at the contacts of soil particles. Géotechnique Lett. 2013, 3, 59–66. [Google Scholar] [CrossRef]
- Yan, W.M.; Dong, J. Effect of Particle Grading on the Response of an Idealized Granular Assemblage. Int. J. Geomech. 2011, 11, 276–285. [Google Scholar] [CrossRef]
- Yan, W.M.; Zhang, L. Fabric and the critical state of idealized granular assemblages subject to biaxial shear. Comput. Geotech. 2013, 49, 43–52. [Google Scholar] [CrossRef]
- Fu, P.; Dafalias, Y.F. Fabric evolution within shear bands of granular materials and its relation to critical state theory. Int. J. Numer. Anal. Methods Geomech. 2010, 35, 1918–1948. [Google Scholar] [CrossRef]
- Guo, N.; Zhao, J. The signature of shear-induced anisotropy in granular media. Comput. Geotech. 2013, 47, 1–15. [Google Scholar] [CrossRef]
- Huang, X.; Hanley, K.J.; O’Sullivan, C.; Kwok, C.Y. Exploring the influence of interparticle friction on critical state behaviour using DEM. Int. J. Numer. Anal. Methods Geomech. 2014, 38, 1276–1297. [Google Scholar] [CrossRef]
- Kidokoro, T.; Arai, R.; Saeki, M. Investigation of dynamics simulation of granular particles using spherocylinder model. Granul. Matter 2015, 17, 743–751. [Google Scholar] [CrossRef]
- Mindlin, R.D.; Deresiewicz, H. Elastic Spheres in Contact Under Varying Oblique Forces. J. Appl. Mech. 1953, 20, 327–344. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, Q.; Li, Y.; Li, Z.; Jin, H.; Wassgren, C.; Curtis, J.S. Discrete element method models of elastic and elastoplastic fiber assemblies. AIChE J. 2021, 67, e17296. [Google Scholar] [CrossRef]
- Mindlin, R.D. Compliance of Elastic Bodies in Contact. J. Appl. Mech. 1949, 16, 259–268. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Particle diameter (mm) | = 5, 6 #, 7, 8, 10 |
| Intruder diameter (mm) | = 40 |
| Container diameter (mm) | = 5 # = 230 |
| Length of intruder (mm) | L = 450 # |
| Young’s modulus (GPa) | Eacr = 2.5, Egls = 71.7 |
| Poisson’s ratio | acrgls = 0.24 |
| Density (kg/m3) | ρacr = 1190, ρgls = 2502 |
| Coefficient of friction | acr = 0.3 #gls = 0.3 |
| Coefficient of restitution | eacr = 0.865, egls = 0.88 |
| Time step (s) | ∆t = 1.496 × 10−6 |
| Gravity (m/s2) | g = 9.81 |
| Penetration speed (m/s) | V = 0.01 #~10 |
| Particles bed height (mm) | H = 535 # |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, F.; Chen, Y.; Li, Y.; Li, Y. A Drag Force Model of Vertical Penetration into a Granular Medium Based on DEM Simulations and Experiments. Appl. Sci. 2024, 14, 2336. https://doi.org/10.3390/app14062336
Wang F, Chen Y, Li Y, Li Y. A Drag Force Model of Vertical Penetration into a Granular Medium Based on DEM Simulations and Experiments. Applied Sciences. 2024; 14(6):2336. https://doi.org/10.3390/app14062336
Chicago/Turabian StyleWang, Fulin, Yuying Chen, Yang Li, and Yanjie Li. 2024. "A Drag Force Model of Vertical Penetration into a Granular Medium Based on DEM Simulations and Experiments" Applied Sciences 14, no. 6: 2336. https://doi.org/10.3390/app14062336