
Zinc Oxide-Based Rotational–Linear Triboelectric Nanogenerator


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
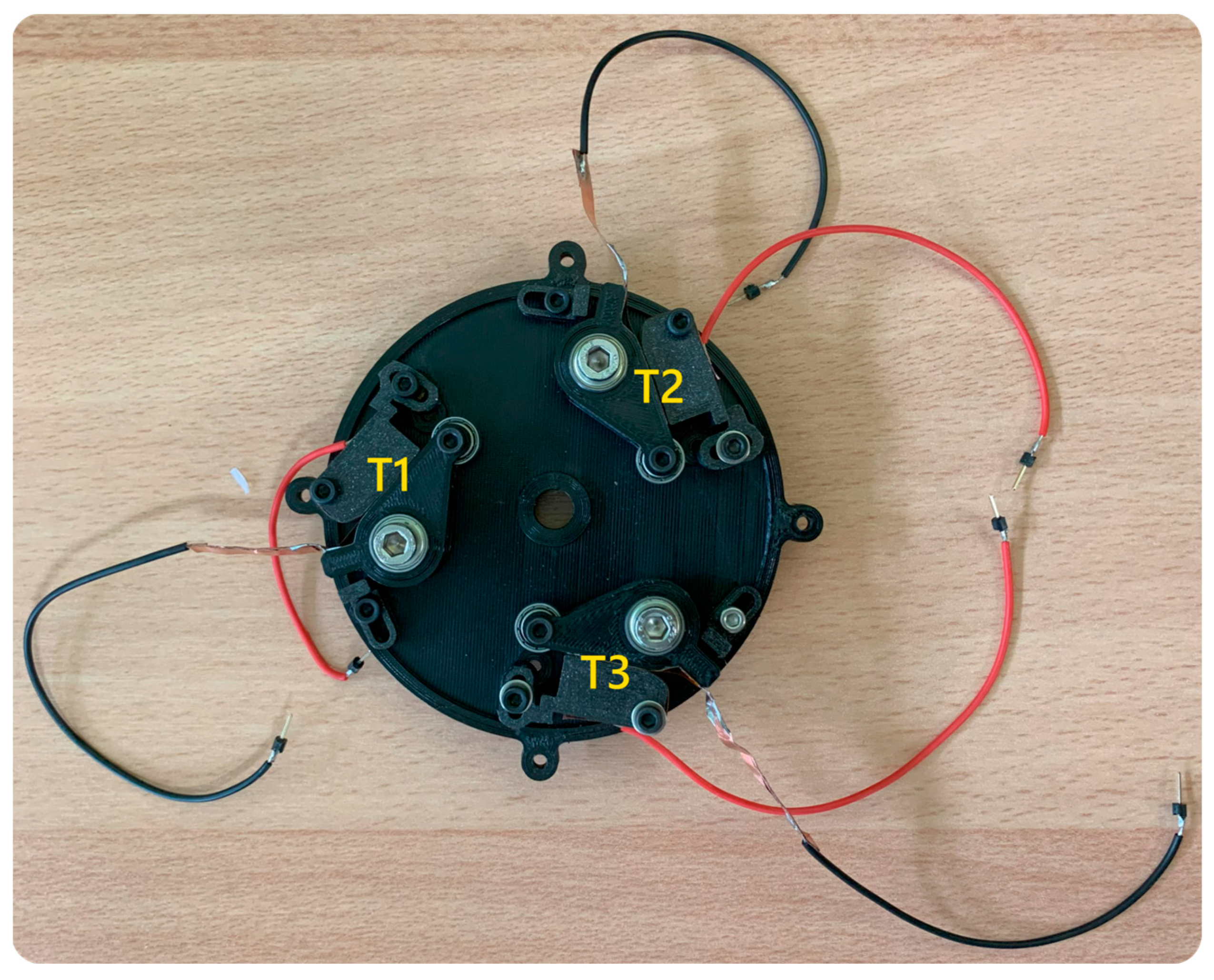
2.1. Design and Fabrication of the Rotational–Linear Tribogenerators (RL-TENG)
- Material: PETG (polyethylene terephthalate glycol);
- Layer height: 0.2 mm;
- Perimeters: 4;
- Infill: 40% (triangles).
2.2. Characterization Setup
2.3. Electrical Measurements
3. Results and Discussion
3.1. Operating Principle of Tribogenerators in Contact-Separation Mode
- -
- Phase 1: The active area is stationary at its balance position. No current flows through the external circuit.
- -
- Phase 2: The active area begins moving until it reaches the position of maximum displacement. Current flows to the external circuit due to electrostatic induction. The current flow takes place for the duration of the movement of the active area.
- -
- Phase 3: The active area remains still at the maximum displacement for a short amount of time. No current flows through the external circuit.
- -
- Phase 4: The active area starts moving backwards towards its balance position. Current flows to the external circuit due to electrostatic induction, but in the opposite direction relative to phase P2.
- -
- Phase 5: The active area reaches its maximum position and stops moving. No current flows through the external circuit.
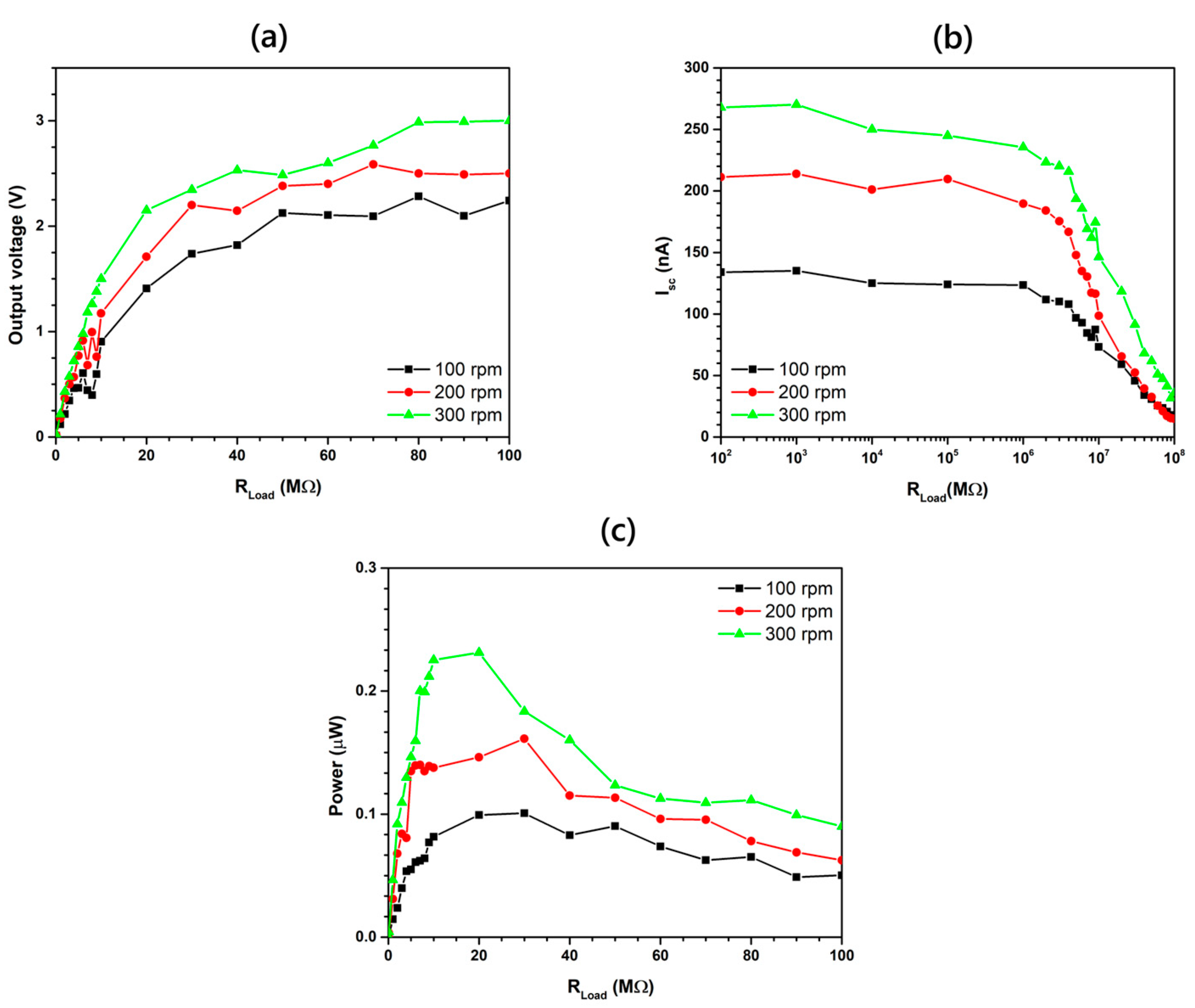
3.2. Characterization of the RL-TENG
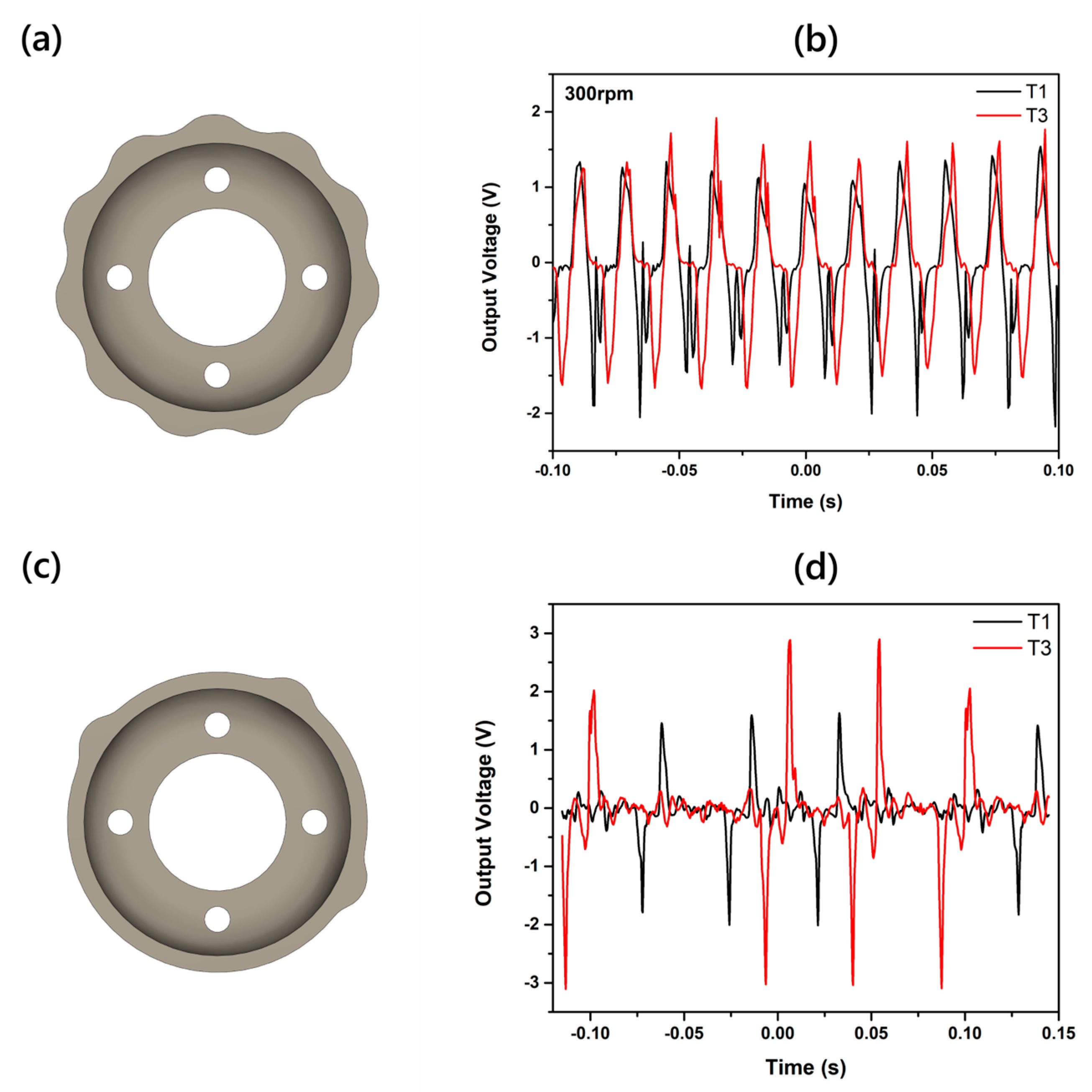
3.3. Connectivity of the Triboelectric Pairs
3.4. Optimization of Performance Characteristics
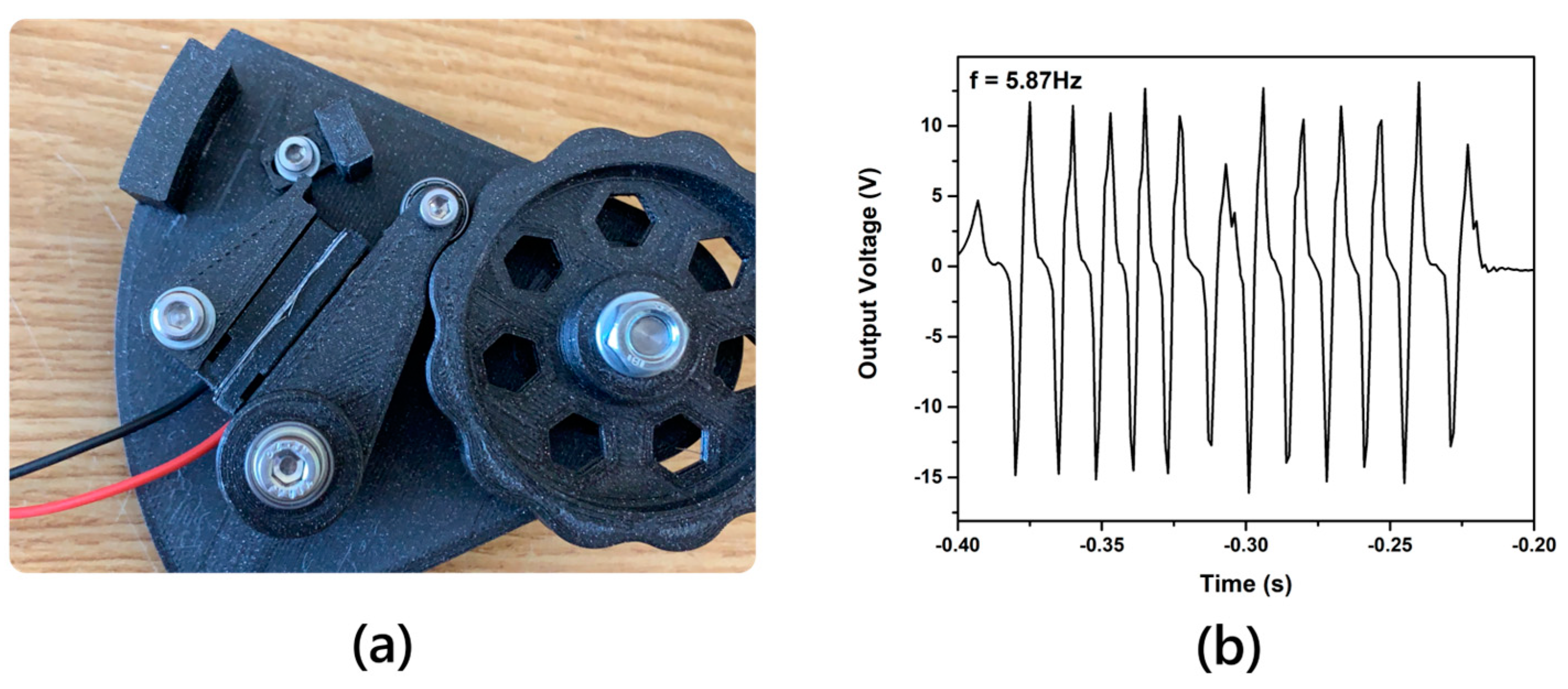
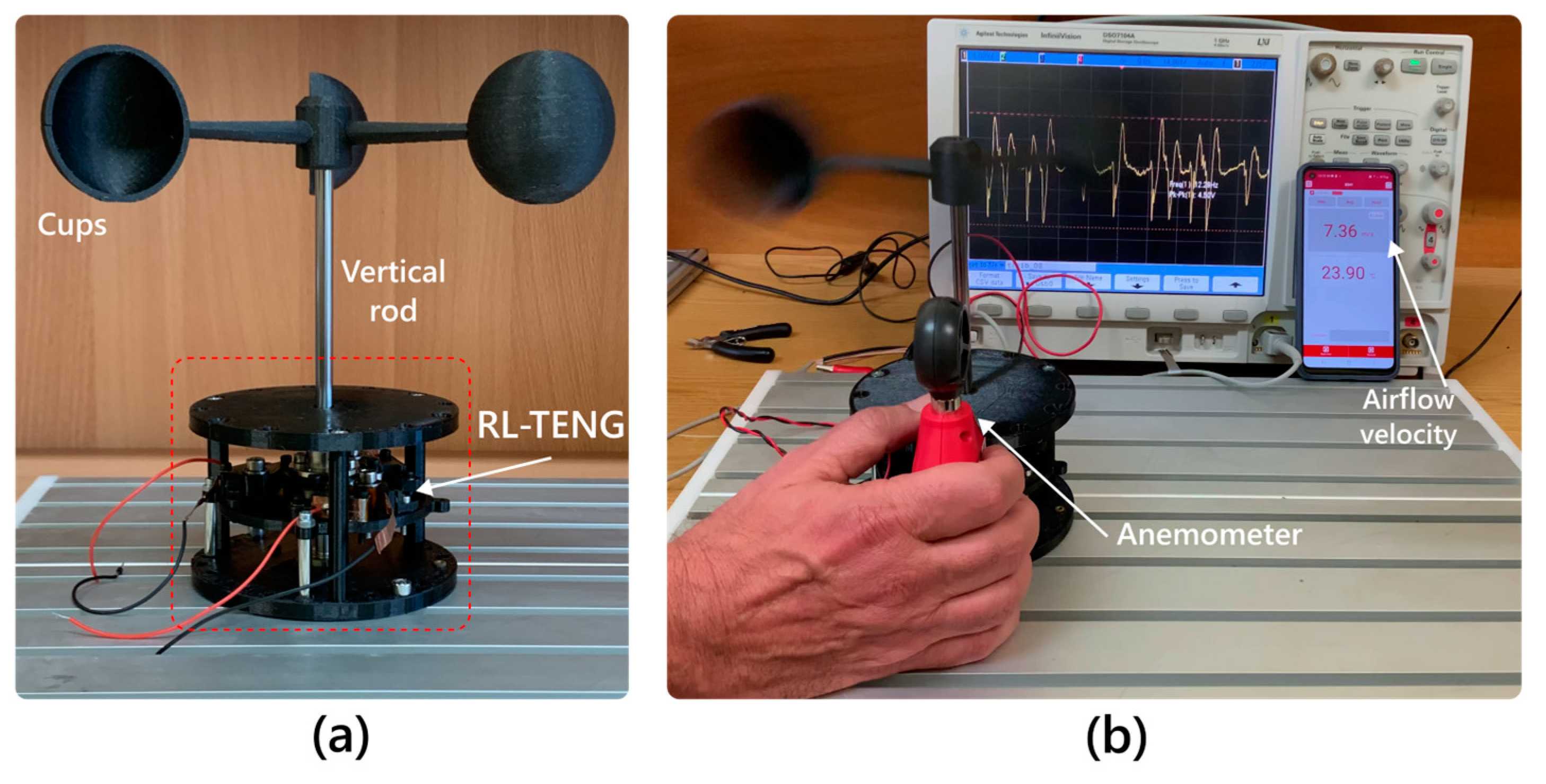
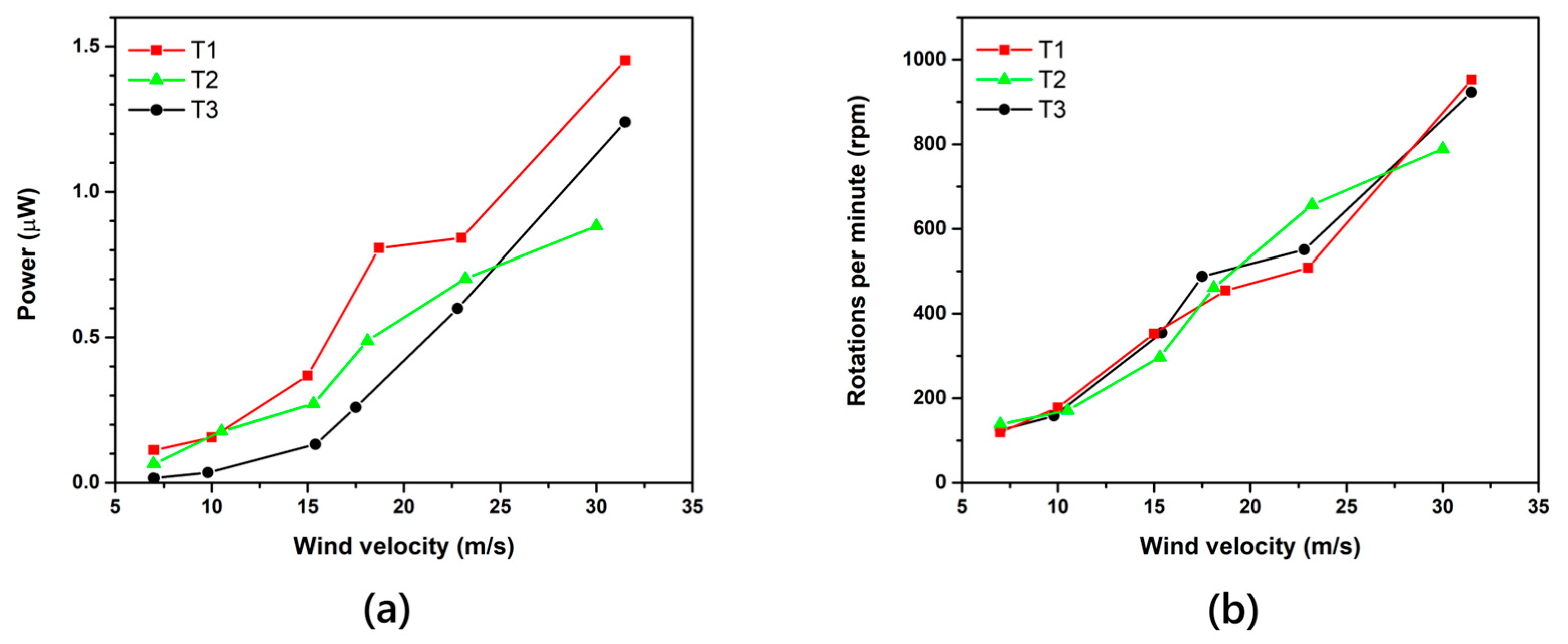
3.5. Application for Harvesting Wind Energy
3.6. Advantages of the Proposed RL-TENG
- Since RL-TENG operates in contact-separation mode, material wear is minimized compared to conventional rotational tribogenerators where continuous contact (in sliding mode) is required at high rotational velocities. It is thus expected that the operational time of the proposed RL-TENG will be significantly higher compared to that of rotational devices.
- Since there is no sliding between the two triboelectric surfaces, no high temperatures are developed because of friction.
- Due to its design, several material combinations can be easily used as triboelectric materials. By selecting a material combination that is further away in the triboelectric series, the triboelectric signal can be significantly increased.
- It can be scaled up by increasing its size both radially as well as vertically to increase the surface area and thus improve the tribogenerator’s performance. Another way to increase the surface would be to implement origami-inspired structures which have been demonstrated to significantly increase triboelectric performance [24,25].
- Another way to enhance the output performance of the RL-TENG is to use hybrid energy-harvesting approaches, such as combining piezoelectric, triboelectric and electromagnetic generators in a single device [25]. The advantage of the proposed design is that it can be easily adjusted to exploit all performance improvements that have been demonstrated for contact-separation mode tribogenerators [26].
- It can be assembled in a modular way.
- It can be fabricated using simple mechanical parts with reduced cost, increased lifetime and simple maintenance.
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Choi, D.; Lee, Y.; Lin, Z.H.; Cho, S.; Kim, M.; Ao, C.K.; Soh, S.; Sohn, C.; Jeong, C.K.; Lee, J.; et al. Recent Advances in Triboelectric Nanogenerators: From Technological Progress to Commercial Applications. ACS Nano 2023, 17, 11087–11219. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Li, H.; Zhao, D.; Gao, Q.; Li, X.; Wang, J.; Wang, Z.L.; Cheng, T. Material’s Selection Rules for High Performance Triboelectric Nanogenerators. Mater. Today 2023, 64, 61–71. [Google Scholar] [CrossRef]
- Delgado-Alvarado, E.; Elvira-Hernández, E.A.; Hernández-Hernández, J.; Huerta-Chua, J.; Vázquez-Leal, H.; Martínez-Castillo, J.; García-Ramírez, P.J.; Herrera-May, A.L. Recent Progress of Nanogenerators for Green Energy Harvesting: Performance, Applications, and Challenges. Nanomaterials 2022, 12, 2549. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Örtegren, J.; Hummelgård, M.; Olsen, M.; Andersson, H.; Olin, H. A Review of the Advances in Composites/Nanocomposites for Triboelectric Nanogenerators. Nanotechnology 2022, 33, 212003. [Google Scholar] [CrossRef] [PubMed]
- Chao, S.; Ouyang, H.; Jiang, D.; Fan, Y.; Li, Z. Triboelectric Nanogenerator Based on Degradable Materials. EcoMat 2021, 3, e12072. [Google Scholar] [CrossRef]
- Lin, L.; Wang, S.; Xie, Y.; Jing, Q.; Niu, S.; Hu, Y.; Wang, Z.L. Segmentally Structured Disk Triboelectric Nanogenerator for Harvesting Rotational Mechanical Energy. Nano Lett. 2013, 13, 2916–2923. [Google Scholar] [CrossRef] [PubMed]
- Lin, L.; Wang, S.; Niu, S.; Liu, C.; Xie, Y.; Wang, Z.L. Noncontact Free-Rotating Disk Triboelectric Nanogenerator as a Sustainable Energy Harvester and Self-Powered Mechanical Sensor. ACS Appl. Mater. Interfaces 2014, 6, 3031–3038. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, T.; Tang, W.; Han, C.; Zhang, L.; Wang, Z.L. Rotating-Disk-Based Direct-Current Triboelectric Nanogenerator. Adv. Energy Mater. 2014, 4, 1301798. [Google Scholar] [CrossRef]
- Bai, P.; Zhu, G.; Liu, Y.; Chen, J.; Jing, Q.; Yang, W.; Ma, J.; Zhang, G.; Wang, Z.L. Cylindrical Rotating Triboelectric Nanogenerator. ACS Nano 2013, 7, 6361–6366. [Google Scholar] [CrossRef]
- Zhang, N.; Qin, C.; Feng, T.; Li, J.; Yang, Z.; Sun, X.; Liang, E.; Mao, Y.; Wang, X. Non-Contact Cylindrical Rotating Triboelectric Nanogenerator for Harvesting Kinetic Energy from Hydraulics. Nano Res. 2020, 13, 1903–1907. [Google Scholar] [CrossRef]
- Qu, Z.; Huang, M.; Dai, R.; An, Y.; Chen, C.; Nie, G.; Wang, X.; Zhang, Y.; Yin, W. Using Non-Contact Eccentric Nanogenerator to Collect Energy Continuously under Periodic Vibration. Nano Energy 2021, 87, 106159. [Google Scholar] [CrossRef]
- Yang, H.; Liu, W.; Xi, Y.; Lai, M.; Guo, H.; Liu, G.; Wang, M.; Li, T.; Ji, X.; Li, X. Rolling Friction Contact-Separation Mode Hybrid Triboelectric Nanogenerator for Mechanical Energy Harvesting and Self-Powered Multifunctional Sensors. Nano Energy 2018, 47, 539–546. [Google Scholar] [CrossRef]
- Dong, X.; Liu, Z.; Yang, P.; Chen, X. Harvesting Wind Energy Based on Triboelectric Nanogenerators. Nanoenergy Adv. 2022, 2, 245–270. [Google Scholar] [CrossRef]
- Park, S.; Ryu, H.; Park, S.; Hong, H.; Jung, H.Y.; Park, J.J. Rotating Triboelectric Generator Using Sliding Contact and Noncontact from 1D Fiber Friction. Nano Energy 2017, 33, 184–194. [Google Scholar] [CrossRef]
- Xin, Y.; Du, T.; Liu, C.; Hu, Z.; Sun, P.; Xu, M. A Ring-Type Triboelectric Nanogenerator for Rotational Mechanical Energy Harvesting and Self-Powered Rotational Speed Sensing. Micromachines 2022, 13, 556. [Google Scholar] [CrossRef] [PubMed]
- Segkos, A.; Tsamis, C. Rotating Triboelectric Nanogenerators for Energy Harvesting and Their Applications. Nanoenergy Adv. 2023, 3, 170–219. [Google Scholar] [CrossRef]
- Mo, J.; Zhang, C.; Lu, Y.; Liu, Y.; Zhang, N.; Wang, S.; Nie, S. Radial Piston Triboelectric Nanogenerator-Enhanced Cellulose Fiber Air Filter for Self-Powered Particulate Matter Removal. Nano Energy 2020, 78, 105357. [Google Scholar] [CrossRef]
- Hinari, E.; Bardakas, A.; Tsamis, C. Enhancement of the performance of ZnO-based triboelectric generators by nitrogen doping. Energy Harvest. Syst. 2024. submitted. [Google Scholar]
- Jayasvasti, S.; Thainiramit, P.; Yingyong, P.; Isarakorn, D. Technique for Measuring Power across High Resistive Load of Triboelectric Energy Harvester. Micromachines 2021, 12, 766. [Google Scholar] [CrossRef]
- Niu, S.; Wang, S.; Lin, L.; Liu, Y.; Zhou, Y.S.; Hu, Y.; Wang, Z.L. Theoretical Study of Contact-Mode Triboelectric Nanogenerators as an Effective Power Source. Energy Environ. Sci. 2013, 6, 3576–3583. [Google Scholar] [CrossRef]
- Dharmasena, R.D.I.G.; Jayawardena, K.D.G.I.; Mills, C.A.; Dorey, R.A.; Silva, S.R.P. A Unified Theoretical Model for Triboelectric Nanogenerators. Nano Energy 2018, 48, 391–400. [Google Scholar] [CrossRef]
- Taghavi, M.; Beccai, L. A Contact-Key Triboelectric Nanogenerator: Theoretical and Experimental Study on Motion Speed Influence. Nano Energy 2015, 18, 283–292. [Google Scholar] [CrossRef]
- Vasandani, P.; Mao, Z.H.; Jia, W.; Sun, M. Relationship between Triboelectric Charge and Contact Force for Two Triboelectric Layers. J. Electrostat. 2017, 90, 147–152. [Google Scholar] [CrossRef]
- Hu, G.; Zhao, C.; Yang, Y.; Li, X.; Liang, J. Triboelectric Energy Harvesting Using an Origami-Inspired Structure. Appl. Energy 2022, 306, 118037. [Google Scholar] [CrossRef]
- Pongampai, S.; Pakawanit, P.; Charoonsuk, T.; Hajra, S.; Kim, H.J.; Vittayakorn, N. Design and Optimization of Miura-Origami-Inspired Structure for High-Performance Self-Charging Hybrid Nanogenerator. J. Sci. Adv. Mater. Devices 2023, 8, 100618. [Google Scholar] [CrossRef]
- Xie, L.; Zhai, N.; Liu, Y.; Wen, Z.; Sun, X. Hybrid Triboelectric Nanogenerators: From Energy Complementation to Integration. Research 2021, 2021, 9143762. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bardakas, A.; Segkos, A.; Tsamis, C. Zinc Oxide-Based Rotational–Linear Triboelectric Nanogenerator. Appl. Sci. 2024, 14, 2396. https://doi.org/10.3390/app14062396
Bardakas A, Segkos A, Tsamis C. Zinc Oxide-Based Rotational–Linear Triboelectric Nanogenerator. Applied Sciences. 2024; 14(6):2396. https://doi.org/10.3390/app14062396
Chicago/Turabian StyleBardakas, Achilleas, Apostolos Segkos, and Christos Tsamis. 2024. "Zinc Oxide-Based Rotational–Linear Triboelectric Nanogenerator" Applied Sciences 14, no. 6: 2396. https://doi.org/10.3390/app14062396
APA StyleBardakas, A., Segkos, A., & Tsamis, C. (2024). Zinc Oxide-Based Rotational–Linear Triboelectric Nanogenerator. Applied Sciences, 14(6), 2396. https://doi.org/10.3390/app14062396