
Peak Acceleration Distribution on the Surface of Reef Islands under the Action of Vertical Ground Motion

Abstract
:1. Introduction
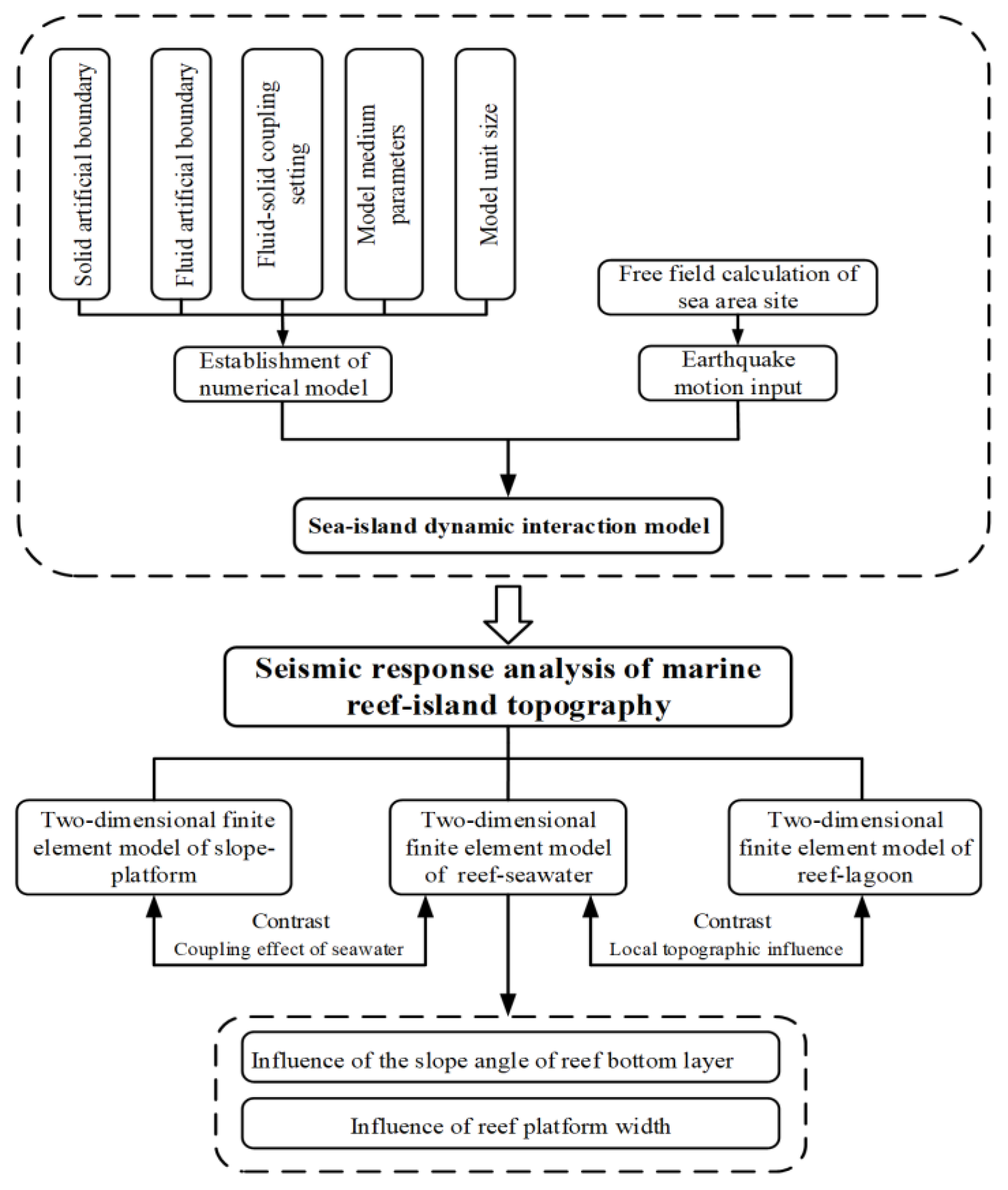
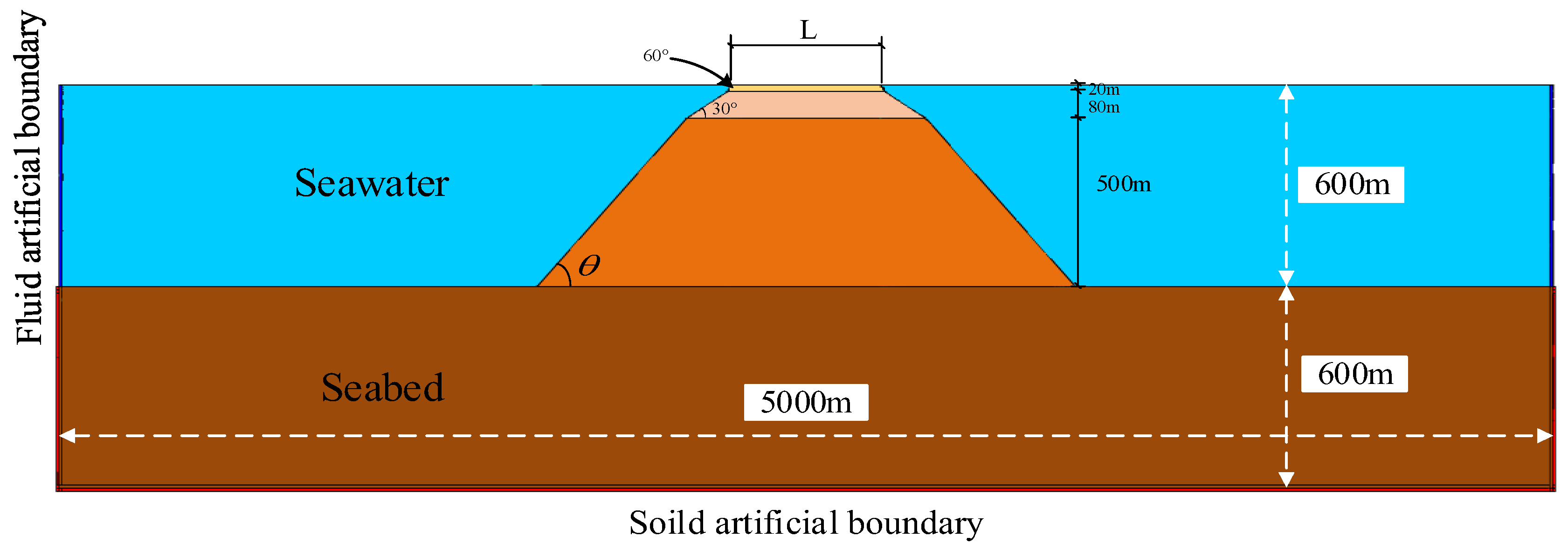
2. Finite Element Model of Reef-Island–Seawater System
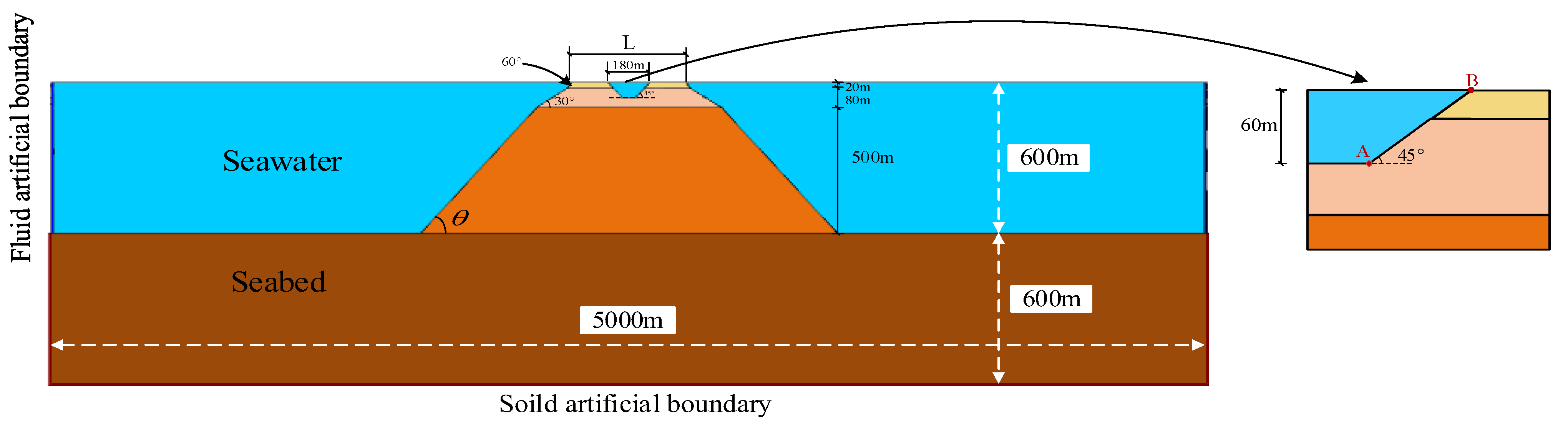
2.1. Computational Model
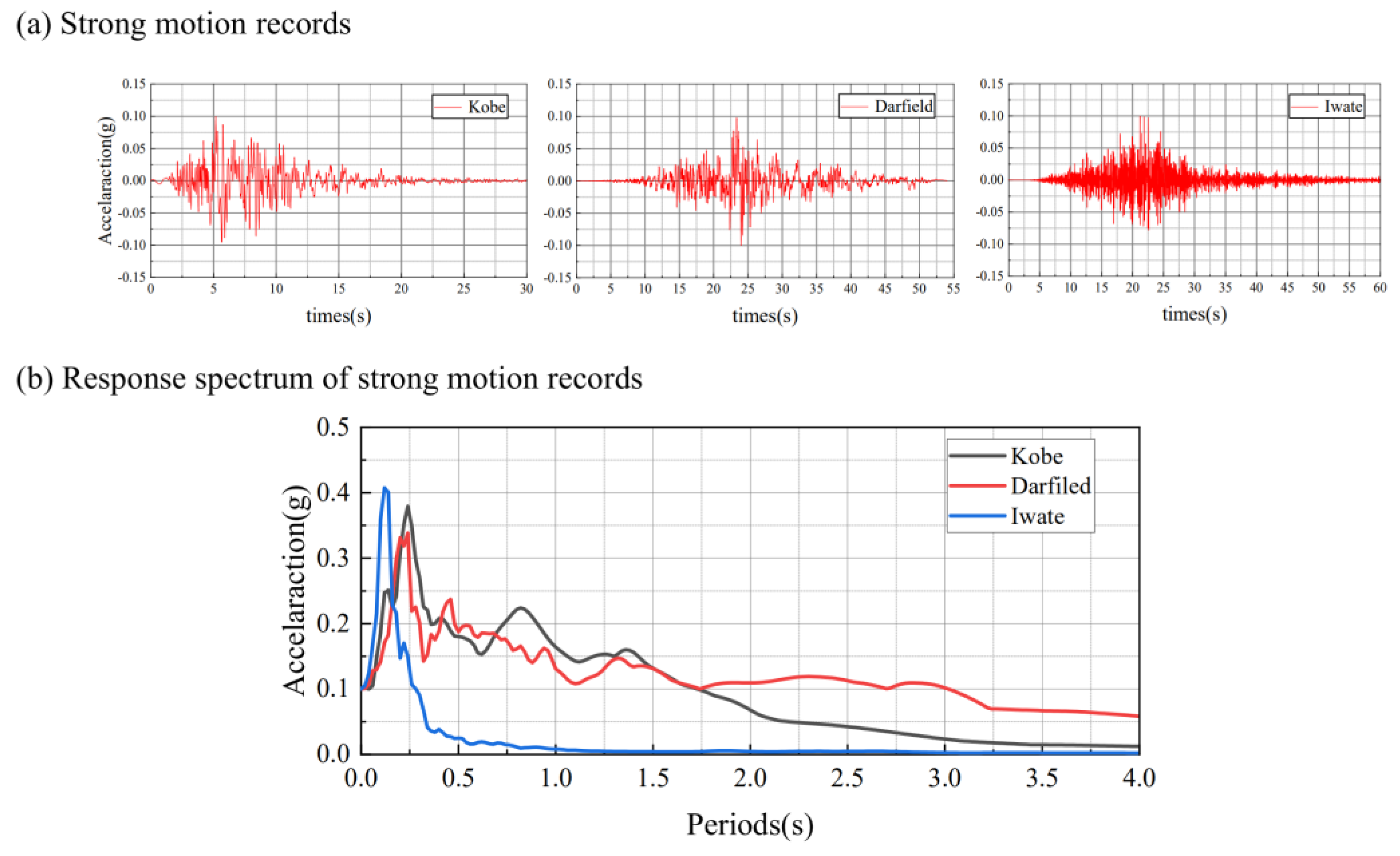
2.2. Bedrock Input Motion
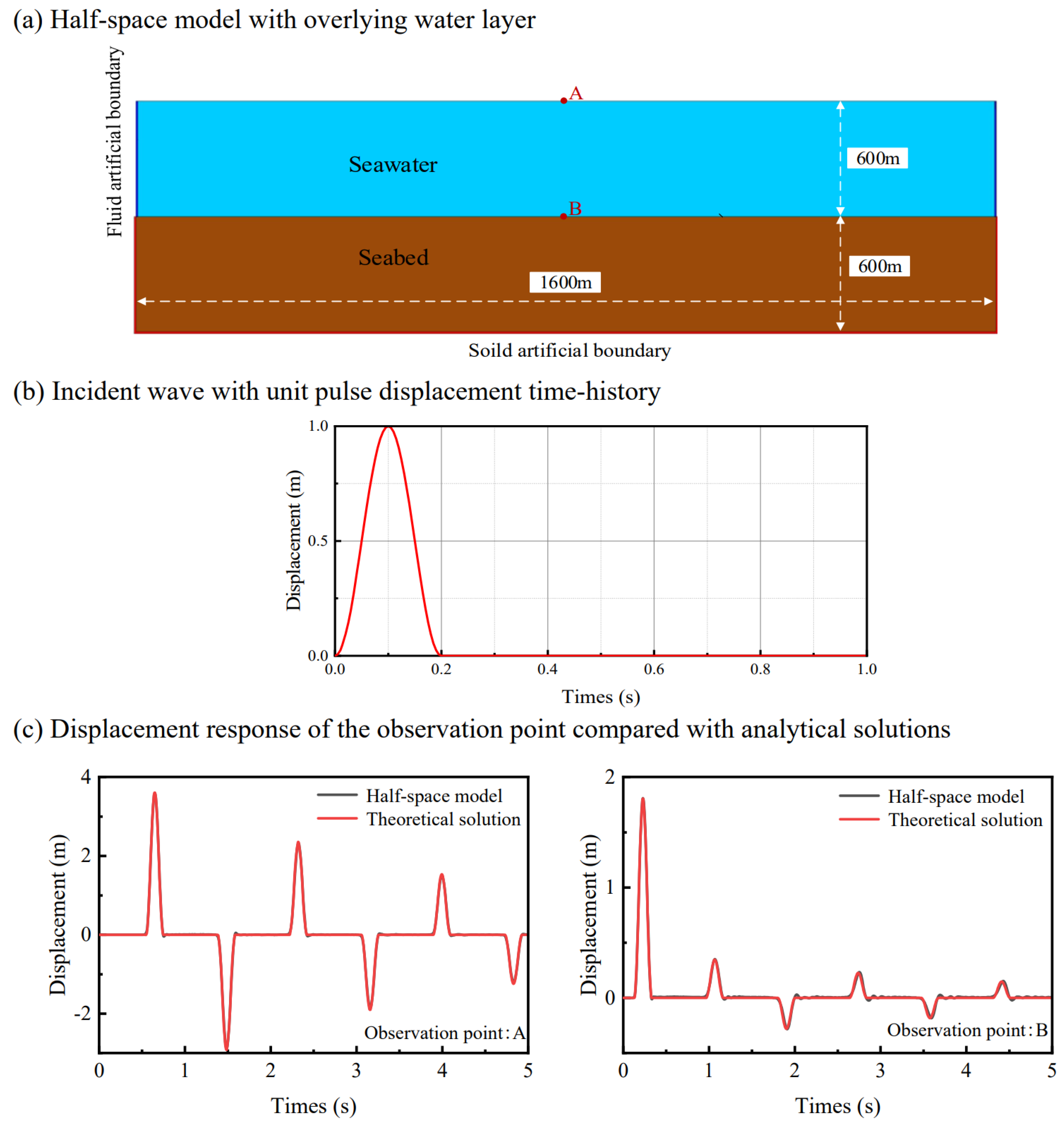
2.3. Verification
3. Parameter Analysis
3.1. Influence of the Slope Angle of Reef Bottom Layer on Site Responses
3.1.1. Influence on the Responses of the Reef Platform
3.1.2. Influence on the Responses of Reef Slope and Seabed
3.2. Influence of Reef Platform Width on Site Responses
3.2.1. Influence on the Responses of the Reef Platform
3.2.2. Influence on the Responses of Reef Slope and Seabed
3.3. Influence of Seawater on the Site Seismic Response
4. Influence of Lagoon on the Seismic Response of Reef Island
5. Conclusions
- (1)
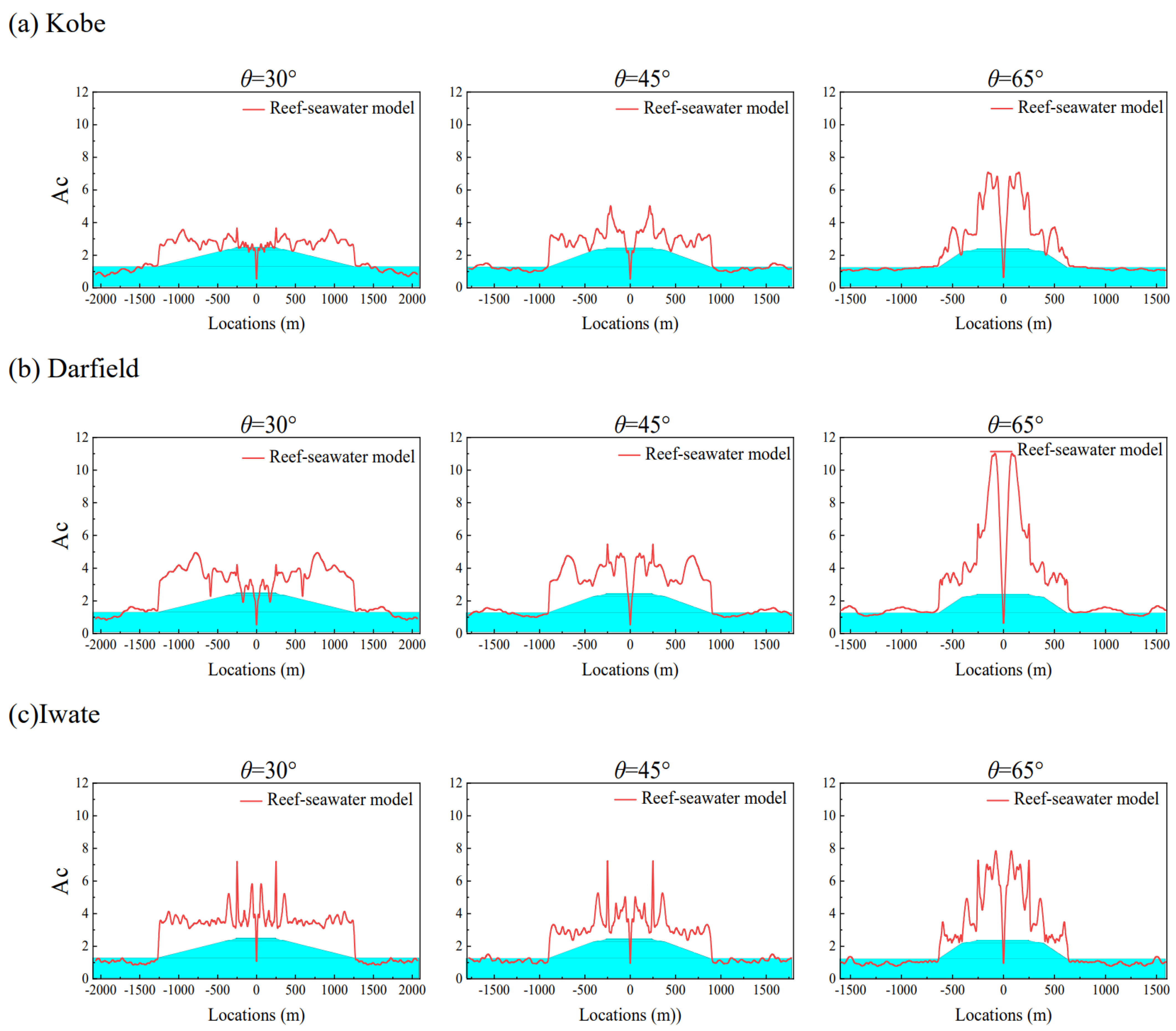
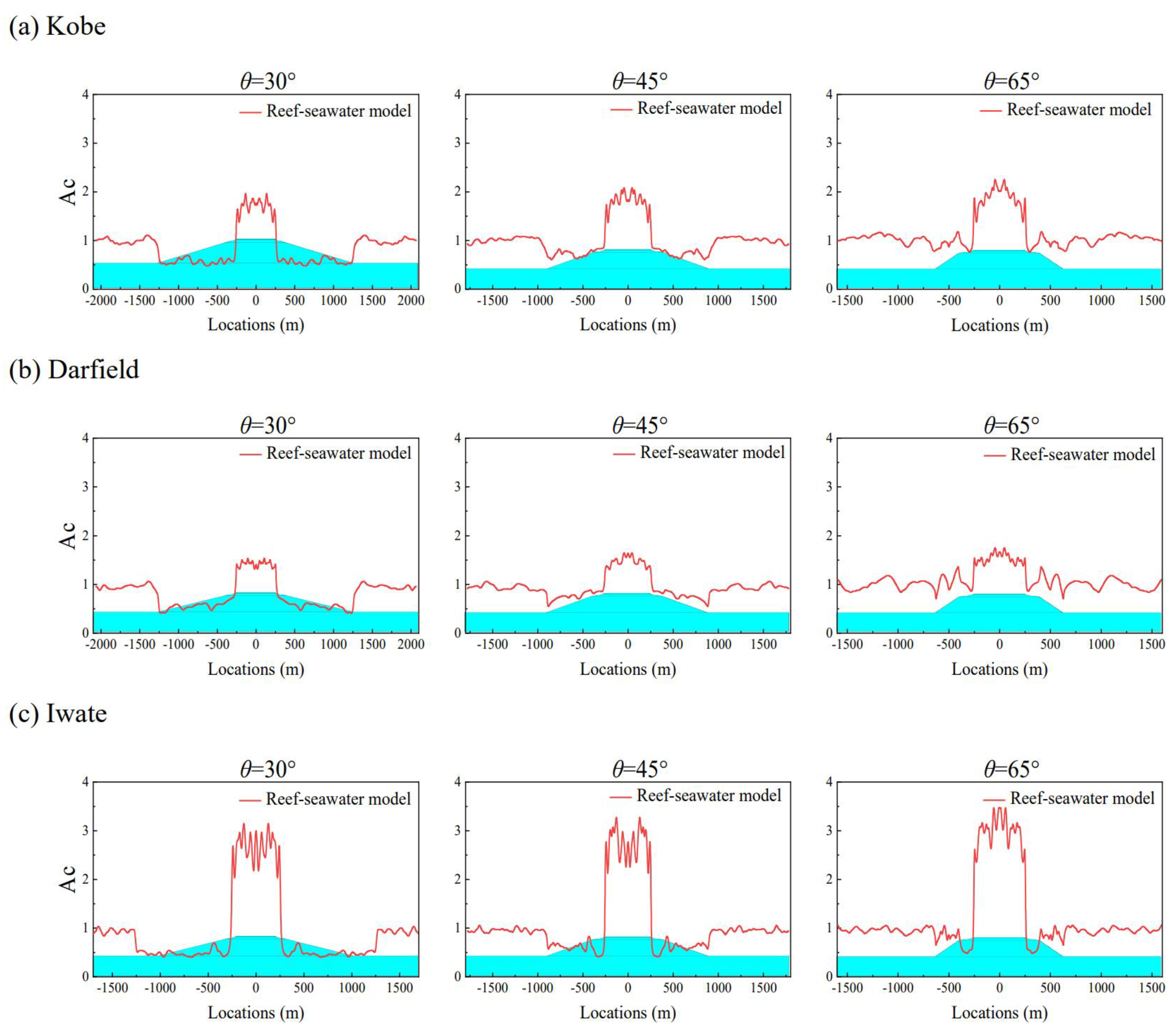
- The influence of the bottom layer slope angle (θ) of the reef island on the peak ground motion distribution is mainly reflected in the position of the reef island slope surface. For the distribution of the horizontal ground motion peak, the influence is mainly reflected in the slope surface of the reef. For the vertical ground motion peak distribution, with the increase of the bottom slope of the island, the vertical ground motion peak distribution of the island slope is closer to the vertical ground motion distribution of the free-field. The larger the bottom slope angle and the more high-frequency components of ground motion input, the larger the amplification coefficient corresponding to the peak of ground motion on the reef platform surface will be.
- (2)
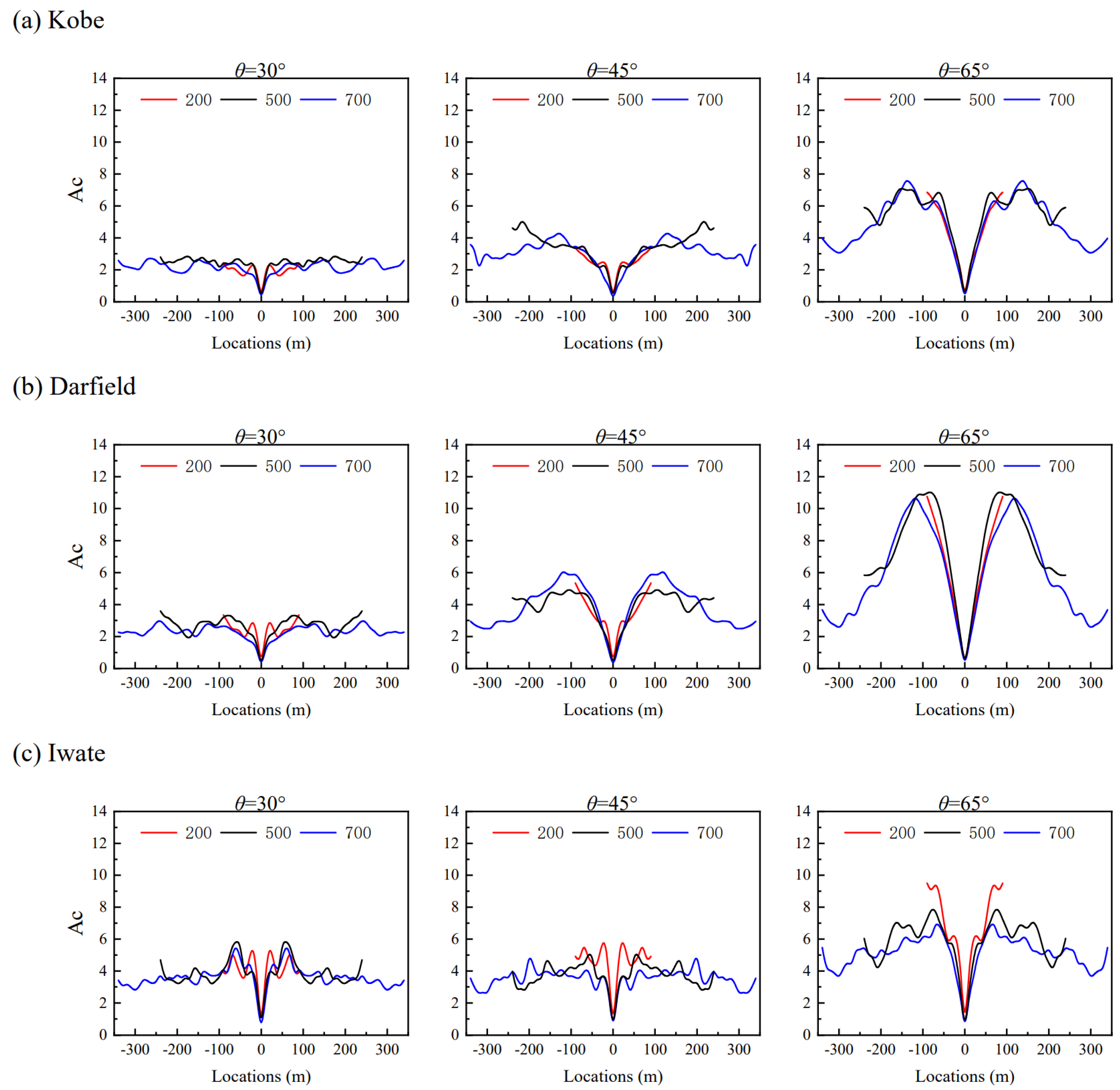
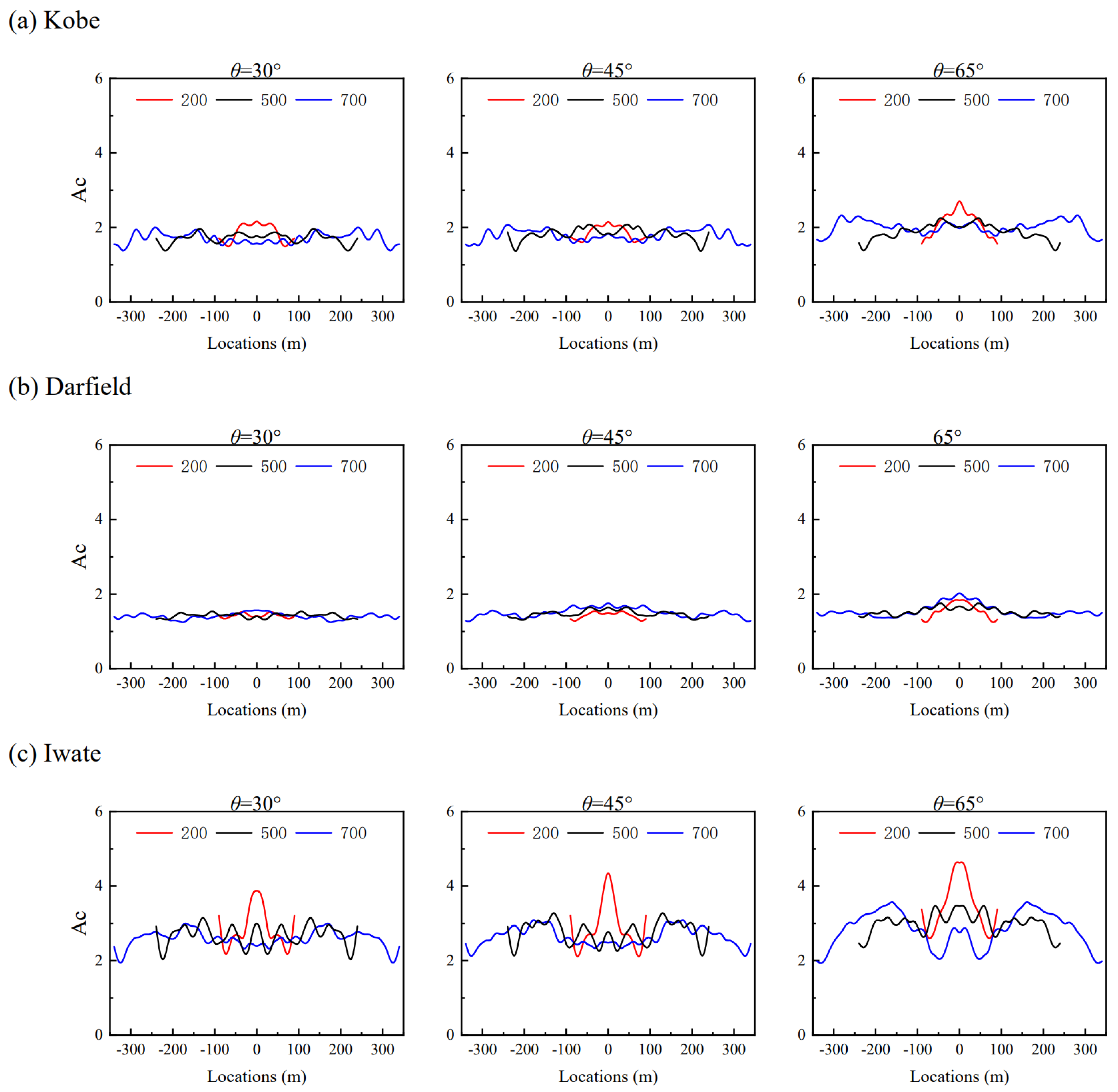
- The influence of the reef platform width (L) on the peak acceleration distribution is reflected in the peak distribution and peak size on the island slope surface and the reef platform surface. The extent of this influence will decrease as the slope angle (θ) increases. For high-frequency input, a smaller reef platform width will induce a larger peak acceleration response on the reef platform surface. For vertical peak ground motion distribution, it is usually shown that high-frequency input motion will cause a large peak ground motion response within a small platform width.
- (3)
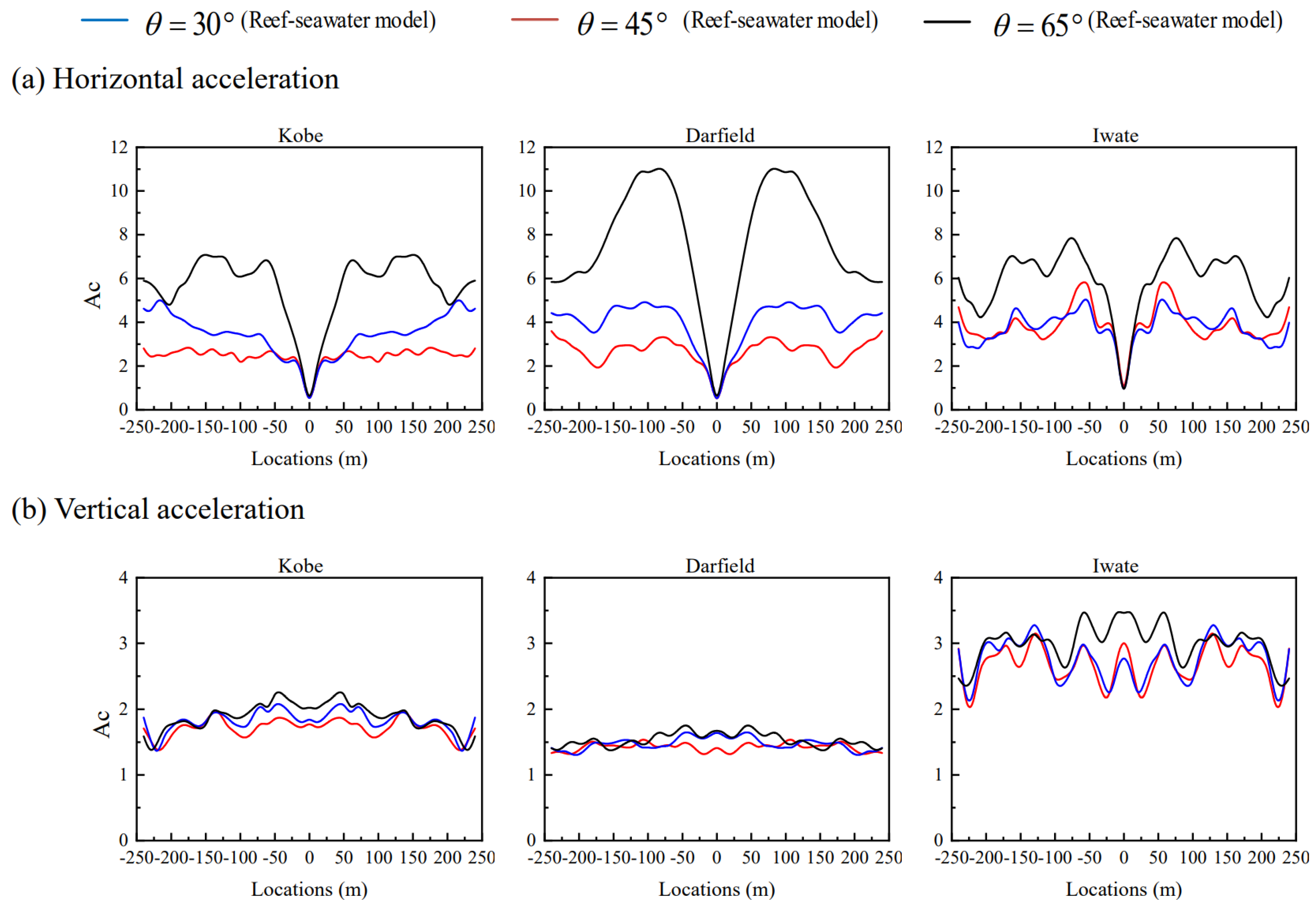
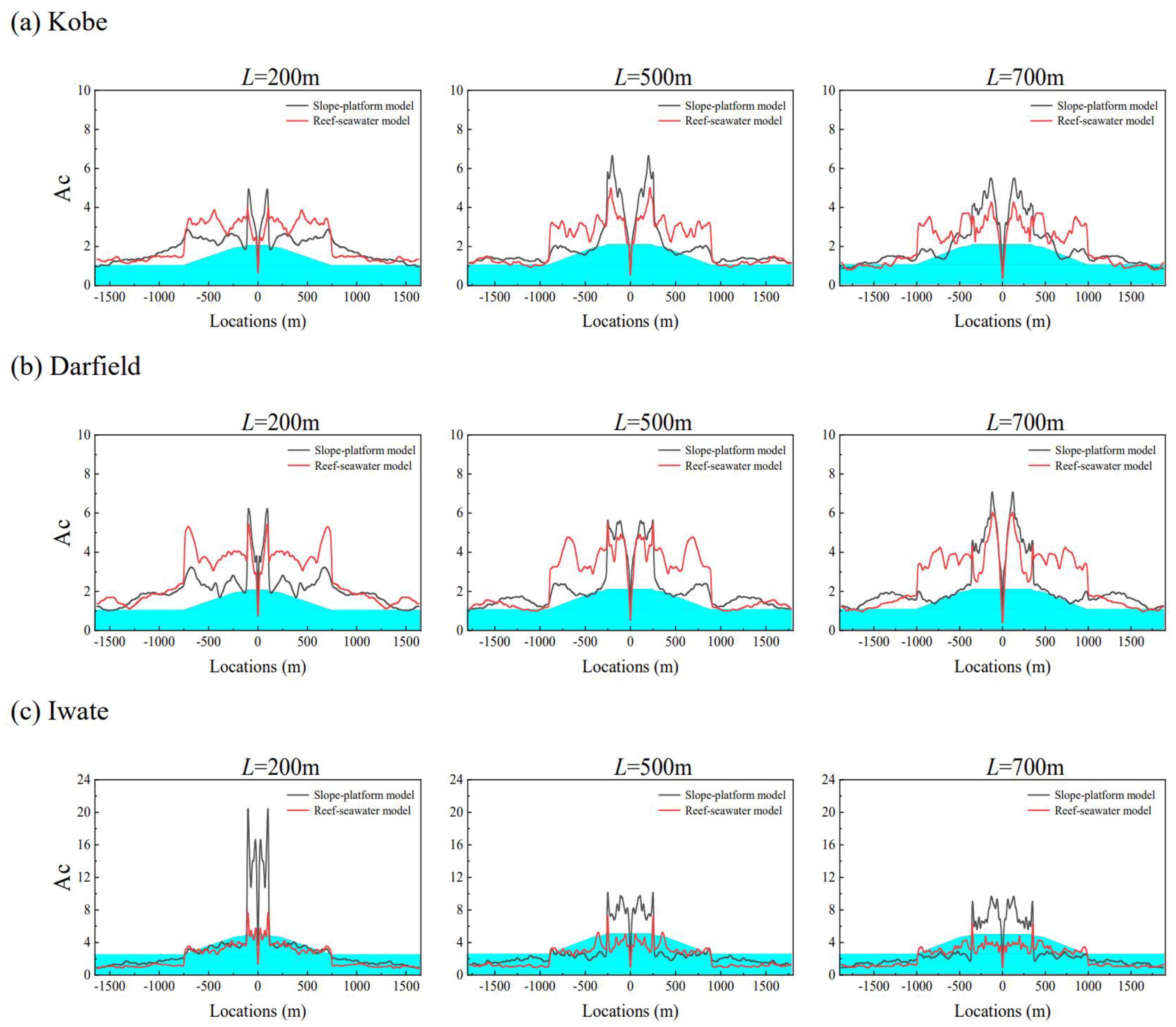
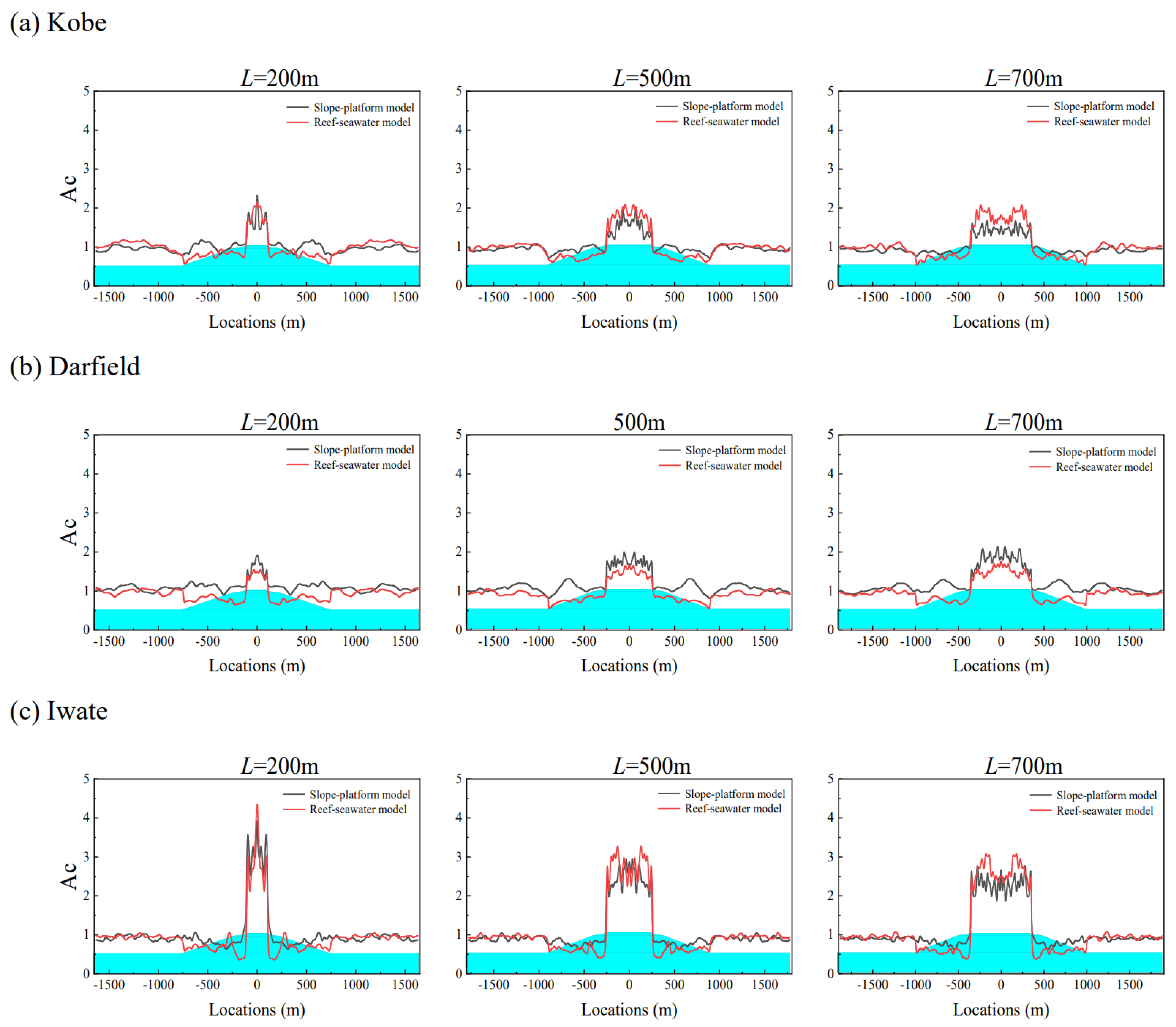
- Seawater has a significant suppressive effect on vertical ground motion. The more high-frequency components of the input ground motion, the more obvious this suppression effect will be. The influence of the seawater layer is mainly reflected in the seismic peak distribution on the slope of the reef and the surrounding seabed. Due to the suppression effect of seawater layer on vertical ground motion, the maximum horizontal acceleration of the island–seawater model is obviously greater than that of the slope–platform model, while the maximum vertical acceleration is smaller than that of the slope–platform model.
- (4)
- The existence of the lagoon will amplify the maximum peak acceleration on the reef platform, and the degree of this amplification is closely related to the slope angle (θ), the reef platform width (L), and the spectral components of the input ground motion. According to the results of different working conditions, the lagoon can amplify the maximum horizontal and vertical peak accelerations on the reef platform by about 19 and 6 times relative to the corresponding free-field results, respectively.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chang, Y.C.; Xin, S.R.; Zhang, X. A Proposal for Joint Marine Scientific Research Activities in the Disputed Maritime Areas of the South China Sea. Coast. Manag. 2022, 50, 215–236. [Google Scholar] [CrossRef]
- Vahdani, S.; Pyke, R.; Siriprusaned, U. Liquefaction of Calcareous Sands and Lateral Spreading Experienced in Guam as a Result of the 1993 Guam Earthquake; US National Center for Earthquake Engineering Research: Buffalo, NY, USA, 1994. [Google Scholar]
- Brandes, H.G.; Nicholson, P.G.; Robertson, I.N. Liquefaction of Kawaihae Harbor and other effects of 2006 Hawaii earthquakes. In Proceedings of the 17th International Offshore and Polar Engineering Conference, Lisbon, Portugal, 1–6 July 2007; International Society of Offshore and Polar Engineers: Cupertino, CA, USA, 2007; pp. 1169–1176. [Google Scholar]
- Green, R.A.; Olson, S.M.; Cox, B.R.; Rix, G.J.; Rathje, E.; Bachhuber, J.; French, J.; Lasley, S.; Martin, N. Geotechnical aspects of failures at Port-au-Prince seaport during the 12 January 2010 Haiti earthquake. Earthq. Spectra 2011, 27 (Suppl. S1), S43–S65. [Google Scholar] [CrossRef]
- Elgamal, A.W.; Zeghal, M.; Parra, E. Liquefaction of reclaimed island in Kobe, Japan. J. Geotech. Eng. 1996, 122, 39–49. [Google Scholar] [CrossRef]
- Hamada, M.; Nakamura, S.; Ohsumi, T. The 1999 Jiji Earthquake Taiwan: Investigation into Damage to Civil Engineering Structures; Japan Society of Civil Engineering: Tokyo, Japan, 1999. [Google Scholar]
- Trifunac, M.D. Scattering of plane SH waves by a semicylindrical canyon. Earthq. Eng. Struct. Dyn. 1972, 1, 267–281. [Google Scholar] [CrossRef]
- Wong, L.; Trifunac, M.D. Scattering of plane SH waves by a semi-elliptical canyon. Earthq. Eng. Struct. Dyn. 1974, 3, 157–169. [Google Scholar] [CrossRef]
- Wong, H.L.; Jennings, P.C. Effects of canyon topography on strong ground motion. Bull. Seismol. Soc. Am. 1975, 65, 1239–1259. [Google Scholar]
- Durante, M.G.; Brandenberg, S.J.; Ausilio, E.; Zimmaro, P. On the combined effect of topographic irregularities and wave passage on the spatial variation of seismic ground motion. Bull. Earthq. Eng. 2022, 20, 3577–3592. [Google Scholar] [CrossRef]
- Yuan, X.M.; Li, R.S.; Sun, R. A new generation method for earthquake response analysis of soil layers. China Civ. Eng. J. 2016, 49, 95–102. (In Chinese) [Google Scholar]
- Rachamadugu, R.; Vikash, G. Lateral Response of Hollow Circular Caisson Embedded in Nonlinear Soils. Int. J. Geomech. 2022, 22, 4021275. [Google Scholar] [CrossRef]
- Yang, J.; Yin, Z.Y. Soil-structure interface modeling with the nonlinear incremental approach. Int. J. Numer. Anal. Methods Geomech. 2021, 45, 1381–1404. [Google Scholar] [CrossRef]
- Huang, D.R.; Wang, G.; Wang, C.Y.; Jin, F. A Modified Frequency-Dependent Equivalent Linear Method for Seismic Site Response Analyses and Model Validation using KiK-Net Borehole Arrays. J. Earthq. Eng. 2020, 24, 827–844. [Google Scholar] [CrossRef]
- Stanko, D.; Markušić, S.; Gazdek, M.; Sanković, V.; Slukan, I.; Ivančić, I. Assessment of the Seismic Site Amplification in the City of Ivanec (NW Part of Croatia) Using the Microtremor HVSR Method and Equivalent-Linear Site Response Analysis. Geosci. 2019, 9, 312. [Google Scholar] [CrossRef]
- Dong, K.; Connolly, D.P.; Laghrouche, O.; Woodward, P.K.; Costa, P.A. Non-linear soil behaviour on high speed rail lines. Comput. Geotech. 2019, 112, 302–318. [Google Scholar] [CrossRef]
- Lysmer, J.; Kuhlemeyer, R.L. Finite dynamic model for infinite media. J. Eng. Mech. Div. 1969, 95, 859–878. [Google Scholar] [CrossRef]
- Deeks, A.J.; Randolph, M.F. Axisymmetric time-domain transmitting boundaries. J. Eng. Mech. 1994, 120, 25–42. [Google Scholar] [CrossRef]
- Liu, J.B.; Li, B. 3D viscoelastic static-dynamical uniform artificial boundary. Chin. Sci. Ser. E 2005, 35, 966–980. (In Chinese) [Google Scholar]
- Stanko, D.; Markušić, S. Site amplification model for Croatia estimated by random vibration theory-based site response analysis. Soil Dyn. Earthq. Eng. 2024, 179, 108547. [Google Scholar] [CrossRef]
- Castelli, F.; Grasso, S.; Lentin, I.V.; Sammito, M.S.V. Assessment of liquefaction effects on dynamic soil-structure interaction for the 1908 Messina and Reggio Calabria scenario earthquake. Soil Dyn. Earthq. Eng. 2024, 178, 108445. [Google Scholar] [CrossRef]
- Cavallaro, A.; Fiamingo, A.; Grasso, S.; Massimino, M.R.; Sammito, M.S.V. Local site amplification maps for the volcanic area of Trecastagni, south-eastern Sicily (Italy). Bull. Earthq. Eng. 2024, 22, 1635–1676. [Google Scholar] [CrossRef]
- Ye, J.H.; Jeng, D.S.; Chan, A.H.C.; Wang, R.; Zhu, Q.C. 3D integrated numerical model for fluid-structures-seabed interaction (FSSI): Loosely deposited seabed foundation. Soil Dyn. Earthq. Eng. 2017, 92, 239–252. [Google Scholar] [CrossRef]
- Chen, G.X.; Zhu, X.; Zhao, D.F.; Liu, J.R. Nonlinear seismic response characteristics of a coral island site. Chin. J. Geotech. Eng. 2019, 41, 405–413. (In Chinese) [Google Scholar]
- Mehl, M.; Uekermann, B.; Bijl, H.; Blom, D.; Gatzhammer, B.; Zuijlen, A. Parallel coupling numerics for partitioned fluid–structure interaction simulations. Comput. Math. Appl. 2016, 71, 869–891. [Google Scholar] [CrossRef]
- Ye, G.L.; Leng, J.; Jeng, D.S. Numerical testing on wave-induced seabed liquefaction with a poro-elastoplastic model. Soil Dyn. Earthq. Eng. 2018, 105, 150–159. [Google Scholar] [CrossRef]
- Soukissian, T.H. Probabilistic modelling of significant wave height using the extended generalized inverse Gaussian distribution. Ocean. Eng. 2021, 230, 109061. [Google Scholar] [CrossRef]
- Jin, L.G.; Duan, X.L.; Zhou, B.G.; Zhou, Z.H. Surface motion of P/SV wave scattering by a semicircular canyon in saturated half-space by complex function and conformal mapping. Soil Dyn. Earthq. Eng. 2023, 175, 108276. [Google Scholar] [CrossRef]
- Adibzade, M.; Shafieefar, M.; Akbari, H.; Panahi, R. Multi-peaked directional wave spectra based on extensive field measurement data in the Gulf of Oman. Ocean. Eng. 2021, 230, 109057. [Google Scholar] [CrossRef]
- Sui, T.; Staunstrup, L.; Carstensen, S.; Fuhrman, D. Span shoulder migration in three-dimensional current-induced scour beneath submerged pipelines. Coast. Eng. 2021, 164, 103776. [Google Scholar] [CrossRef]
- Bao, X.; Liu, J.B. Dynamic finite element analysis methods for liquid container considering fluid-structure interaction. Nucl. Power Eng. 2017, 38, 111–114. [Google Scholar]
- Liu, J.B.; Bao, X.; Wang, D.Y.; Tan, H.; Li, S.T. The internal substructure method for seismic wave input in 3D dynamic soil- structure interaction analysis. Soil Dyn. Earthq. Eng. 2019, 127, 105847. [Google Scholar] [CrossRef]
- Liao, Z.P. Introduction to Wave Motion Theories in Engineering; Science Press: Beijing, China, 2002. [Google Scholar]
- Tso, W.; Zhu, T.; Heidebrecht, A. Engineering implication of ground motion A/V ratio. Soil Dyn. Earthq. Eng. 1992, 11, 133–144. [Google Scholar] [CrossRef]
- Bao, X.; Liu, J.B.; Wang, D.Y.; Wang, J.P.; Guo, D.; Song, K. Seismic response analysis of offshore reef site under incident P wave. Eng. Mech. 2019, 36 (Suppl. S1), 1–7. (In Chinese) [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Layer 1 | Layer 2 | Layer 3 | Seabed |
|---|---|---|---|---|
| Velocity of shear wave (m/s) | 500 | 1800 | 2000 | 2200 |
| Velocity of longitudinal wave (m/s) | 1225 | 4485 | 4835 | 5000 |
| Mass density (kg/m3) | 2000 | 2400 | 2700 | 2700 |
| Poisson’s ratio | 0.4 | 0.404 | 0.38 | 0.38 |
| Slope gradient (°) | 60 | 30 | θ | / |
| Height (m) | 20 | 80 | 500 | 600 |
| Media | Parameter | Value |
|---|---|---|
| Fluid | Mass density (kg/m3) | 1000 |
| Velocity of longitudinal wave (m/s) | 1435 | |
| Solid | Mass density (kg/m3) | 2700 |
| Velocity of longitudinal wave (m/s) | 5000 | |
| Velocity of shear wave (m/s) | 2200 |
| Input Motion | L (m) | θ (°) | Reef–Seawater Model (m/s2) | Island–Lagoon Model (m/s2) | Free-Field (m/s2) | Ac | |
|---|---|---|---|---|---|---|---|
| Reef–Seawater Model | Island–Lagoon Model | ||||||
| Kobe | 200 | 30 | 2.324 | 4.068 | 0.641 | 3.626 | 6.346 |
| 45 | 2.353 | 5.773 | 3.671 | 9.006 | |||
| 65 | 4.396 | 7.433 | 6.858 | 11.596 | |||
| 500 | 30 | 2.429 | 4.288 | 3.789 | 6.690 | ||
| 45 | 3.268 | 5.125 | 5.098 | 7.995 | |||
| 65 | 4.573 | 5.895 | 7.134 | 9.197 | |||
| 700 | 30 | 2.081 | 4.181 | 3.246 | 6.523 | ||
| 45 | 2.789 | 4.116 | 4.351 | 6.421 | |||
| 65 | 4.931 | 6.080 | 7.693 | 9.485 | |||
| Darfield | 200 | 30 | 2.081 | 2.516 | 0.449 | 4.635 | 5.604 |
| 45 | 2.515 | 4.211 | 5.601 | 9.379 | |||
| 65 | 4.827 | 7.151 | 10.751 | 15.927 | |||
| 500 | 30 | 1.973 | 2.281 | 4.394 | 5.080 | ||
| 45 | 2.615 | 2.834 | 5.824 | 6.312 | |||
| 65 | 4.966 | 6.164 | 11.060 | 13.728 | |||
| 700 | 30 | 1.499 | 2.974 | 3.339 | 6.624 | ||
| 45 | 2.755 | 3.552 | 6.136 | 7.911 | |||
| 65 | 4.815 | 4.963 | 10.724 | 11.053 | |||
| Iwate | 200 | 30 | 4.324 | 8.262 | 0.540 | 8.007 | 15.300 |
| 45 | 4.371 | 10.335 | 8.094 | 19.139 | |||
| 65 | 5.756 | 10.490 | 10.659 | 19.426 | |||
| 500 | 30 | 4.372 | 8.338 | 8.096 | 15.441 | ||
| 45 | 4.532 | 8.083 | 8.393 | 14.969 | |||
| 65 | 4.283 | 8.430 | 7.931 | 15.611 | |||
| 700 | 30 | 3.443 | 7.588 | 6.376 | 14.052 | ||
| 45 | 3.328 | 7.747 | 6.163 | 14.346 | |||
| 65 | 3.810 | 7.822 | 7.056 | 14.485 | |||
| Input Motion | L (m) | θ (°) | Reef–Seawater Model (m/s2) | Island–Lagoon Model (m/s2) | Free-Field (m/s2) | Ac | |
|---|---|---|---|---|---|---|---|
| Reef–Seawater Model | Island–Lagoon Model | ||||||
| Kobe | 200 | 30 | 4.516 | 5.378 | 2.042 | 2.212 | 2.634 |
| 45 | 4.536 | 5.527 | 2.221 | 2.707 | |||
| 65 | 5.754 | 6.502 | 2.818 | 3.184 | |||
| 500 | 30 | 4.045 | 5.177 | 1.981 | 2.535 | ||
| 45 | 4.283 | 5.481 | 2.097 | 2.684 | |||
| 65 | 4.644 | 6.240 | 2.274 | 3.056 | |||
| 700 | 30 | 4.159 | 5.035 | 2.037 | 2.466 | ||
| 45 | 4.313 | 5.487 | 2.112 | 2.687 | |||
| 65 | 4.846 | 6.429 | 2.373 | 3.148 | |||
| Darfield | 200 | 30 | 2.974 | 2.888 | 1.931 | 1.540 | 1.496 |
| 45 | 3.030 | 4.062 | 1.569 | 2.104 | |||
| 65 | 4.113 | 6.494 | 2.130 | 3.363 | |||
| 500 | 30 | 3.003 | 3.438 | 1.555 | 1.780 | ||
| 45 | 3.212 | 3.740 | 1.663 | 1.937 | |||
| 65 | 3.394 | 5.179 | 1.758 | 2.682 | |||
| 700 | 30 | 3.044 | 3.389 | 1.576 | 1.755 | ||
| 45 | 3.448 | 3.530 | 1.786 | 1.828 | |||
| 65 | 3.966 | 4.677 | 2.054 | 2.422 | |||
| Iwate | 200 | 30 | 8.435 | 9.993 | 2.175 | 3.878 | 4.594 |
| 45 | 9.839 | 12.692 | 4.524 | 5.835 | |||
| 65 | 10.217 | 12.392 | 4.697 | 5.697 | |||
| 500 | 30 | 7.018 | 8.632 | 3.227 | 3.969 | ||
| 45 | 7.308 | 9.400 | 3.360 | 4.322 | |||
| 65 | 7.739 | 10.827 | 3.558 | 4.978 | |||
| 700 | 30 | 6.609 | 8.122 | 3.039 | 3.734 | ||
| 45 | 6.831 | 8.537 | 3.141 | 3.925 | |||
| 65 | 7.873 | 9.592 | 3.620 | 4.410 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, L.; Du, L.; Zhou, Z.; Bao, X. Peak Acceleration Distribution on the Surface of Reef Islands under the Action of Vertical Ground Motion. Appl. Sci. 2024, 14, 2515. https://doi.org/10.3390/app14062515
Jin L, Du L, Zhou Z, Bao X. Peak Acceleration Distribution on the Surface of Reef Islands under the Action of Vertical Ground Motion. Applied Sciences. 2024; 14(6):2515. https://doi.org/10.3390/app14062515
Chicago/Turabian StyleJin, Liguo, Liting Du, Zhenghua Zhou, and Xin Bao. 2024. "Peak Acceleration Distribution on the Surface of Reef Islands under the Action of Vertical Ground Motion" Applied Sciences 14, no. 6: 2515. https://doi.org/10.3390/app14062515