1. Introduction
Compared to fertilization through trenching, orchard pit fertilization is a reduced tillage method that effectively minimizes soil structure disruption. Additionally, it results in lower energy consumption, contributing to the sustainable development of orchard production. However, orchards in the southern regions are characterized by clayey soils with a high moisture content and strong stickiness [
1]. During pit fertilization drilling operations, there is significant interaction between the drilling device and the soil, necessitating the optimization of operational parameters to achieve the lowest energy consumption. The use of simulation experiments to analyze the interaction between soil and machinery has become a popular method for designing and optimizing soil contact components in agricultural equipment [
2].
Currently, there has been extensive research on parameter calibration for different soil types using the Discrete Element Method (DEM). The DEM, proposed by Cundall et al. [
3] is a numerical method for analyzing the behavior of granular materials. It can simulate both micro and macro deformations between particle materials and is suitable for simulating interactions between soil and rigid bodies. Previous studies have utilized the DEM to investigate the interaction processes between soil and agricultural machinery [
4,
5,
6]. Zhang Rui et al. [
7] employed the Hertz–Mindlin contact model to calibrate parameters for sand particles in a discrete element model. Wang Xianliang et al. [
8] focused on the loess soil of North China as their research subject, conducting parameter calibration for the soil in perennial no-till farmland using a discrete element simulation model. Wu Tao, He Yiming, and others [
9,
10] calibrated discrete element model parameters based on angle of repose experiments for sandy soil, loamy soil in the southern region, and sloping farmland soil in the southwestern region, respectively. Li Junwei et al. [
11] selected the Hertz–Mindlin with JKR contact model (JKR is a parameter under the Hertz–Mindlin with JKR contact model, and its value is jointly influenced by particle moisture content and size) to calibrate discrete element simulation parameters for sticky heavy black soil with different moisture contents.
Regarding the discrete element modeling of soil and mechanical soil contact components, Koushkaki et al. [
12] aimed to investigate the impact of different forward speeds and working depths on traction forces by combining the Hysteretic spring model and the Linear adhesion/cohesion model. They calibrated and validated a discrete element model and its parameters for the interaction between clay and deep loosening plow. Zeng et al. [
13] established a discrete element simulation model for the interaction among soil, machinery, and crop residue, validating the accuracy of the model. Ding Qishuo et al. [
14] utilized the Hertz–Mindlin with Bonding model to develop a discrete element model for mechanically deep loosening of cohesive paddy soil. Sun Jingbin et al. [
15] used the Hertz–Mindlin with JKR contact model to calibrate simulation parameters for soil on the Loess Plateau, and verified the effectiveness of the model parameters through rotational tillage experiments on sloping terrain. Rong Shilin et al. [
16] integrated a delayed elastic model and a linear cohesion force model. They calibrated simulation parameters for soil in farmlands in the arid regions of northwest China and developed a simulation model for the interaction between a direct-seeded hole-opening beak and the soil.
Research on the working resistance of soil-engaging components has primarily focused on traction resistance and power consumption analysis, with limited studies on the variations in three-dimensional resistance. Roul et al. [
17] designed a neural network model based on backpropagation learning, capable of accurately predicting the required traction force for various types of soil cultivation implements in sandy clay. This model accurately predicts the traction force needed for different types of soil cultivation implements in sandy clay. Ahmadi et al. [
18] employing classical mechanics theory, derived a dynamic torque calculation model for rotary tiller blades from a kinetic perspective. When compared to experimental results conducted by Chertkiattipol et al. [
19], the torque calculation showed only a 5% margin of error. Wang Zenghui et al. [
20] employed the orthogonal experimental method to identify the primary experimental factors influencing the single-blade torque of rotary tillage and residue chopping. They established a functional relationship between power consumption and blade speed, as well as cultivation depth. Jiang Jiandong et al. [
21] proposed a method to apply vibration loads to a rotary tillage machine to reduce cutting resistance. They investigated the impact of the externally applied excitation mode, frequency, and amplitude on horizontal resistance. Fang Huimin et al. [
22] constructed an interaction model for straw–soil–rotary tiller, analyzing the interaction between straw, soil, and the tool from the perspectives of soil and straw movement and the force angle on the rotary tiller. Xiong Pingyuan et al. [
23] analyzed the three-dimensional working resistance and its variations on rotary tiller blades, constructing a simulation model for the interaction between rotary tiller blades and soil adapted to the southern soil conditions.
In summary, current research by scholars both domestically and internationally on the calibration of soil parameters suggests that the selection of soil contact models depends primarily on the soil moisture content and the elastic characteristics among soil particles. Different contact models need to be chosen for soil particles in various regions based on these considerations. Regarding the study of working resistance in soil-engaging components, using the discrete element method (DEM) to analyze the working resistance of tools is considered feasible. However, in the complex environment of soil, there are numerous constraining factors, and many challenges still need to be addressed.
Previous research has calibrated parameters for soil particles in certain regions, providing insights into the impact patterns and predictive models specifically for the vertical resistance of mechanical equipment. However, there is a lack of comparative analysis for the resistance in the other two directions and a comprehensive understanding of the variations in resistance along all three directions. The objective of this study is to precisely calibrate the interaction parameters between cohesive soil in Southern orchards and the borehole fertilization drilling device. Additionally, a simulation analysis of the three-dimensional working resistance of the spiral drilling tool is conducted. The study involves designing the three-dimensional structure of the drilling device using Solid Works and employing the discrete element method software EDEM2021 to build a simulation model for the interaction between soil–soil and soil–drilling-device. Simulation experiments are performed to replicate the drilling process, analyzing the influence of rotational speed and feed rate on torque and resistance. Finally, a simulation analysis is conducted to understand the impact of various experimental factors on the three-dimensional resistance experienced by the spiral drilling tool, aiming to derive a combination of operational parameters with lower energy consumption. This research establishes a soil–soil and soil–spiral-drilling-tool interaction model tailored to the soil conditions prevalent in Southern orchards, enhancing model accuracy by setting the soil particle model radius. The results of the simulation analysis on the three-dimensional working resistance of the spiral drilling tool provide valuable reference data for the analysis of fertilization energy consumption, as well as studies on equipment vibration and wear.
4. Summary and Conclusions
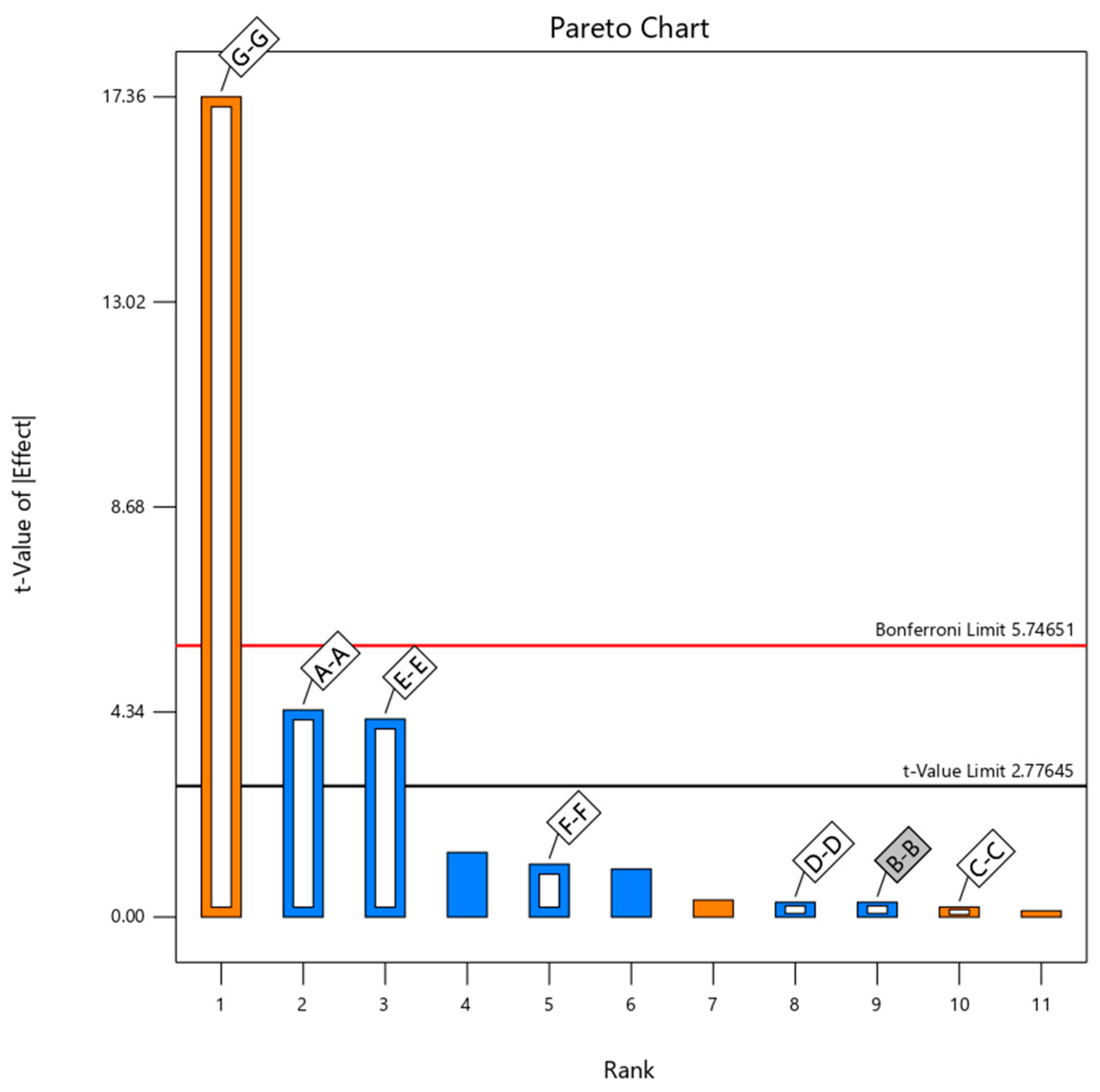
The particle parameters of southern orchard soil were experimentally measured, and modeling was conducted using the EDEM2021 discrete element software. The Hertz–Mindlin with the Johnson–Kendall–Roberts contact model was employed. Utilizing the Plackett–Burman Design, significant contact parameters and model parameters influencing the soil pile angle were selected. These parameters include soil JKR surface energy, soil–soil restitution coefficient, and soil–steel static friction coefficient.
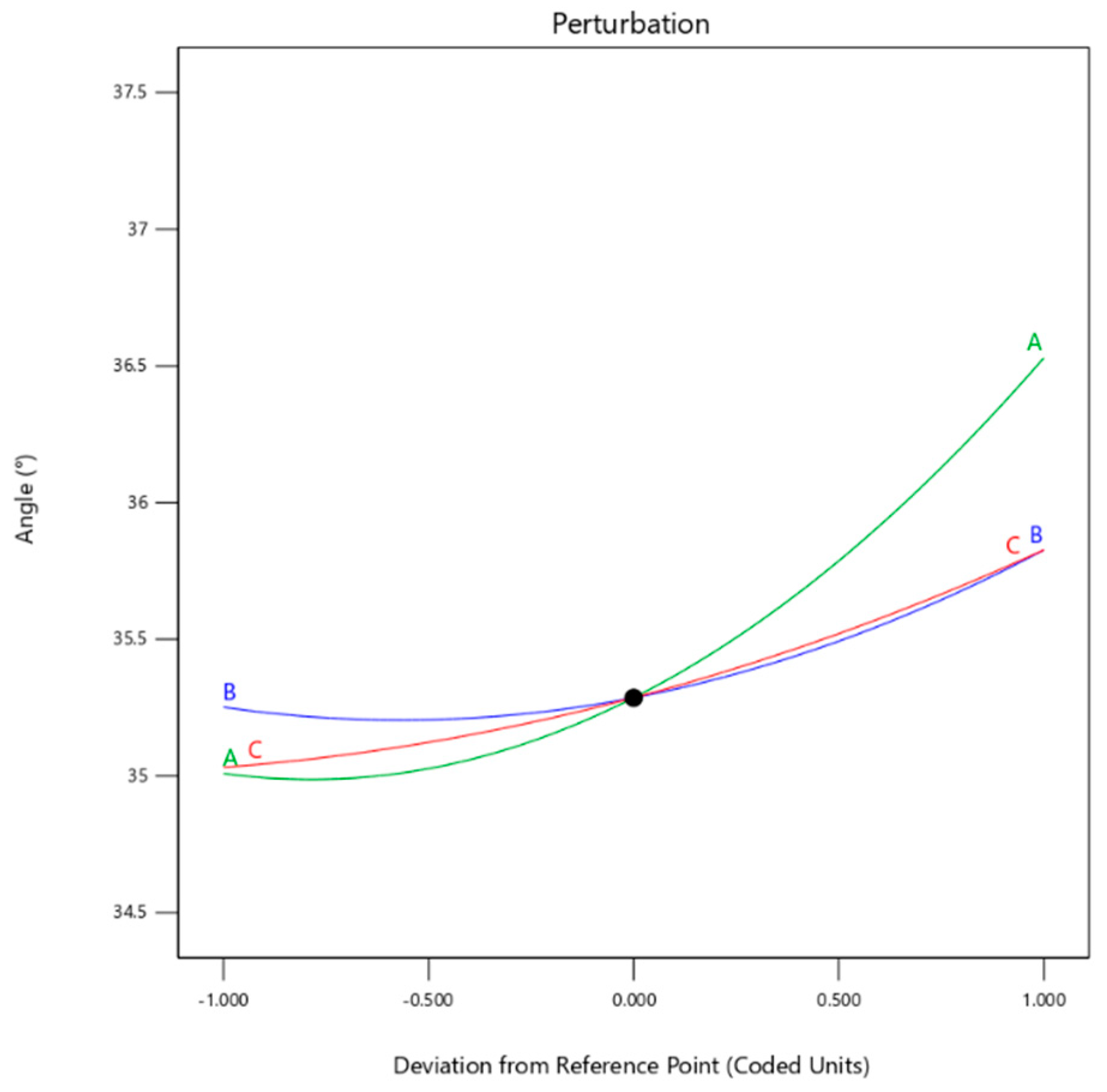
The optimal value ranges for significant parameters were determined through steepest ascent experiments. Subsequently, a regression model for the soil pile angle and significant parameters was established and optimized using the Box–Behnken Design. The optimal values for the parameters were found to be 5.85 J·m−2 for the soil JKR surface energy, 0.65 for the soil–soil restitution coefficient, and 0.5 for the soil–steel static friction coefficient. Simulation experiments were conducted under these calibrated parameters, and the relative error between simulated and measured pile angles was determined to be 0.01%.
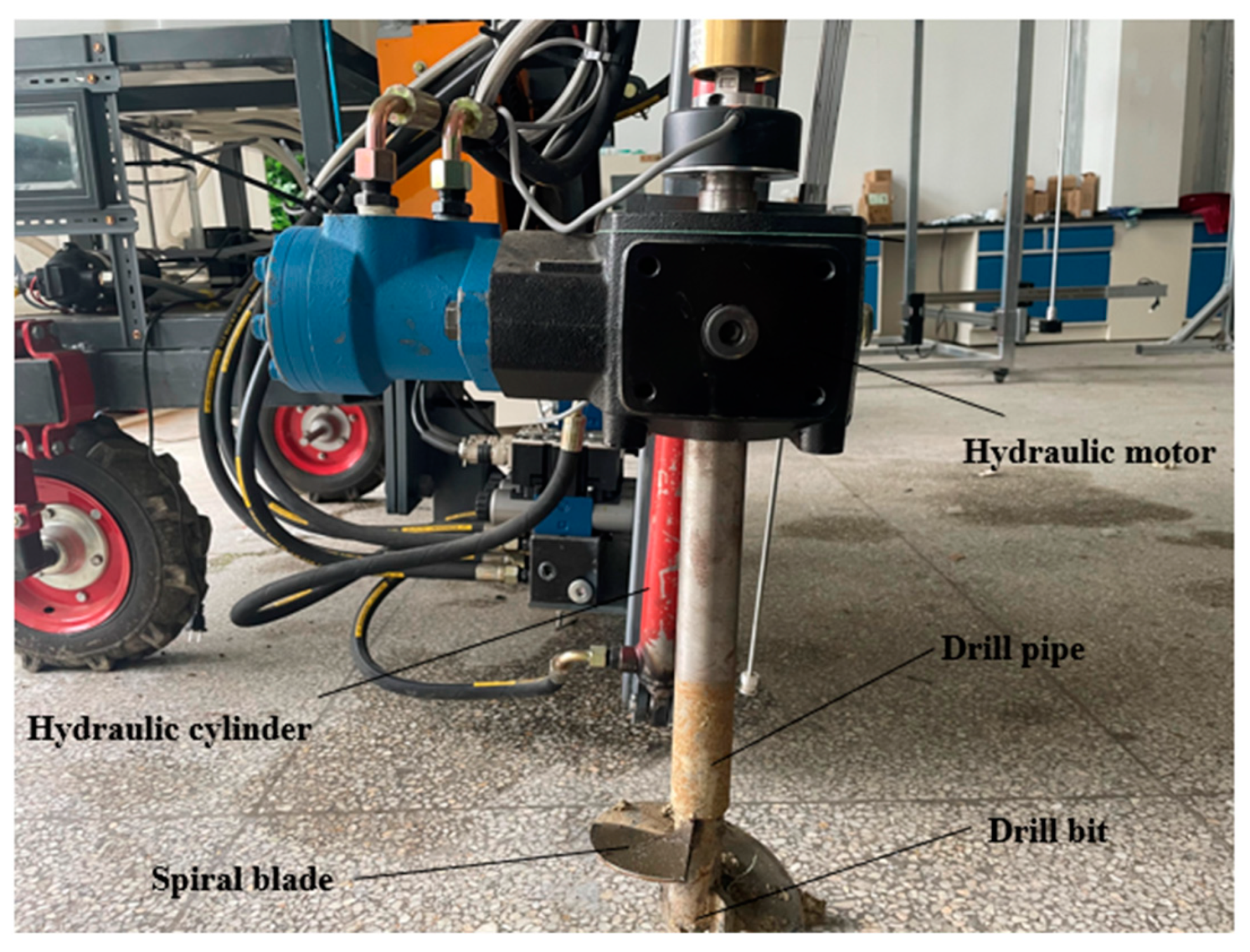
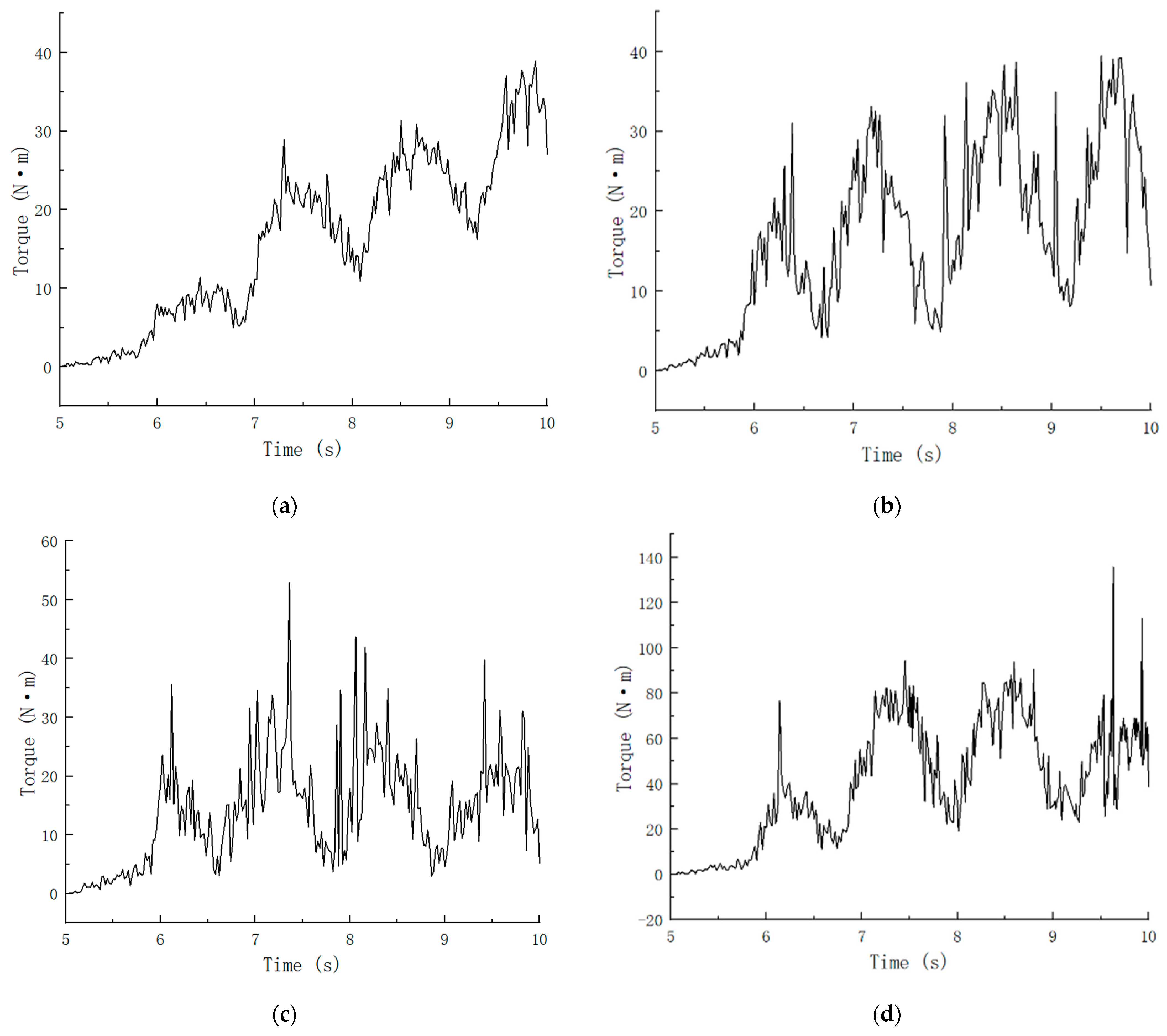
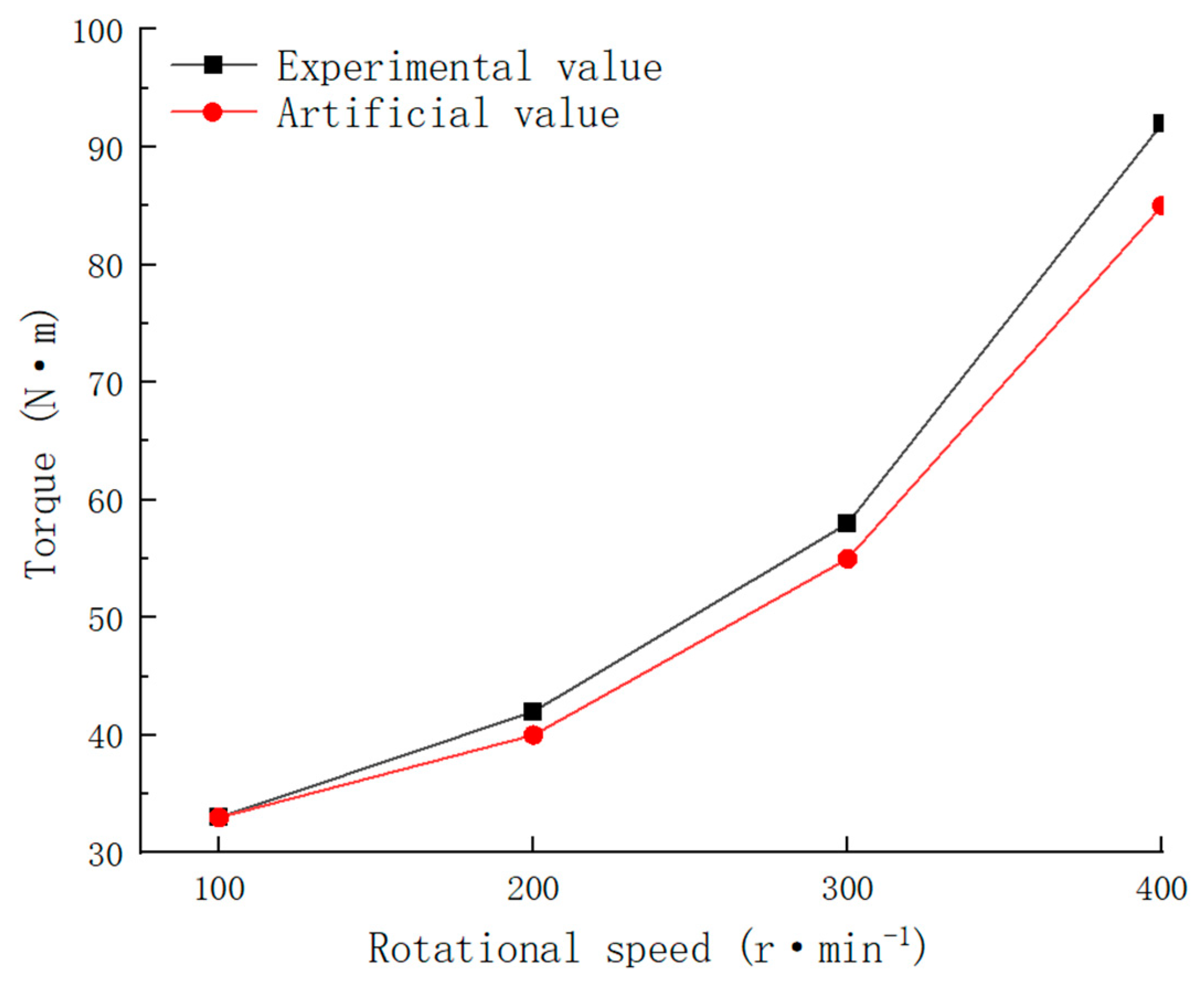
Torque comparative experiments for spiral earth auger were conducted in a soil trench, and the results indicate that the trends in simulated and experimental values align. The torque increased with higher rotational speeds, with a maximum relative error of 7%. The torque initially rose from 0 to a maximum value, then gradually decreased to a lower value, followed by a rapid increase to a higher value before declining again, repeating this pattern. The average total force at a feed rate of 0.05 m/s was found to be a minimum of 200 N. The simulation model effectively captures the variation patterns in drilling power consumption and accurately represents torque values, demonstrating a certain level of reliability.
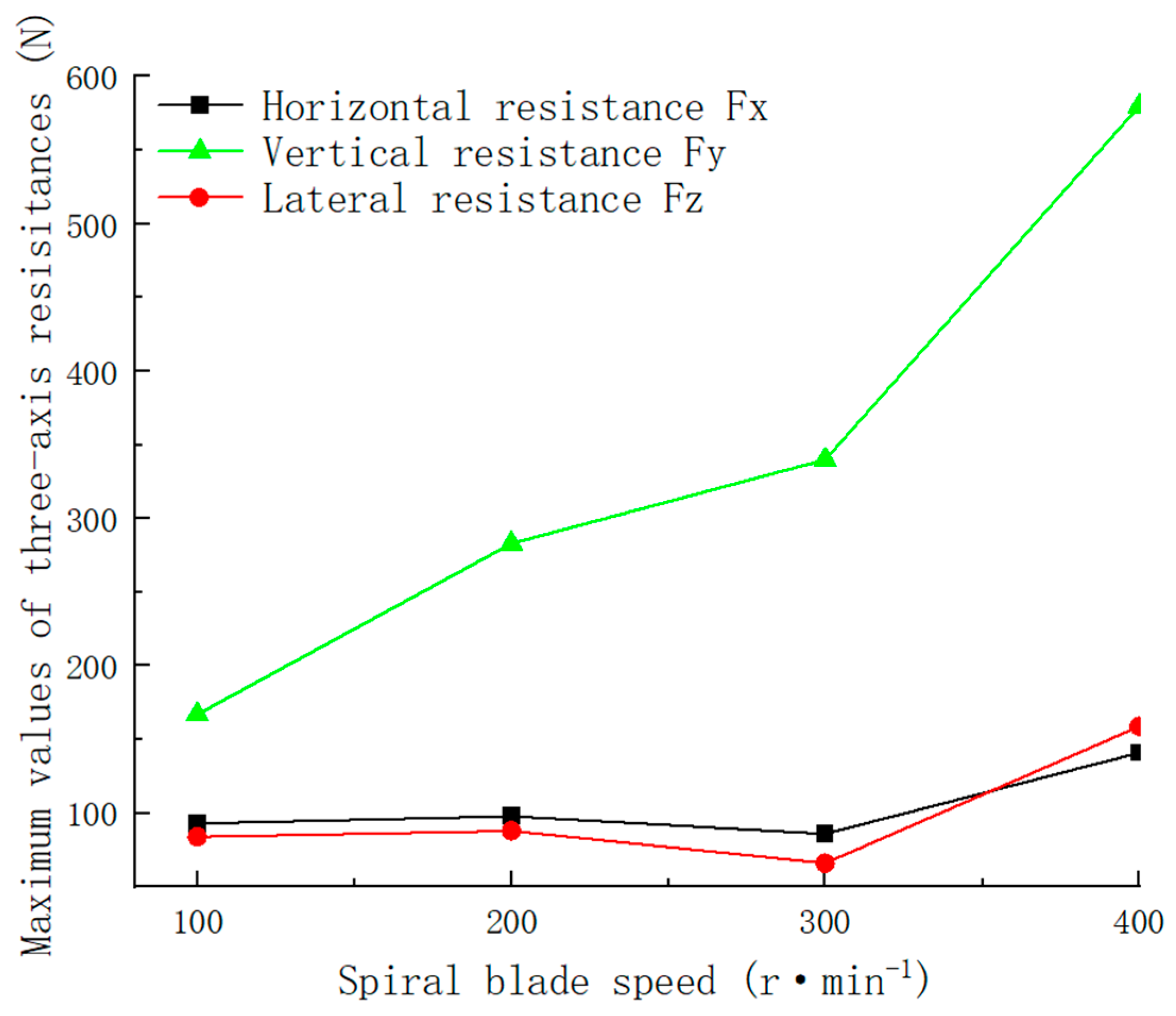
Among the three forces, vertical resistance is the primary factor contributing to power consumption. As the rotational speed increased, the maximum value of vertical resistance was found to continue to rise, while horizontal and lateral resistances exhibited a declining trend. With an increase in feed rate, the maximum values of resistance in all three directions also increased. When the feed rate exceeded 0.05 m/s, there was a sharp increase in the maximum lateral resistance.
By analyzing the three-dimensional forces acting on the spiral blades and conducting a comparative analysis at different rotational speeds and feed rates, along with the results from optimal variance analysis experiments, the optimal rotational speed and feed rate were determined to be 100 r·min−1 and 0.05 m/s, respectively. According to the formula, the optimal power consumption is 0.314 kW.
This study demonstrates the accuracy of the Discrete Element Method in analyzing the three-dimensional working resistance of helical cutting tools. The relevant experimental data can serve as a reference for the analysis of equipment energy consumption, machine vibration, and blade wear studies. However, soil is a complex composite with many influencing factors, and accurately describing the contact state of soil particles remains challenging. In order to enhance computational performance, many scholars set the simulated soil particle radius to 5 mm or larger, which is much larger than the actual field soil particle radius. This leads to distorted simulation results. However, if the soil particle radius is divided too finely, the number of simulated soil particles within the soil trough increases geometrically, causing a significant delay in both computation time and efficiency. To set the soil particle radius close to real values while balancing computational load and simulation effectiveness, this paper employs the sieve analysis method to measure the soil particle size range as the basis for determining the simulated soil particle radius. This approach enhances the accuracy of the soil model. However, since the simulated model assumes that single spherical particles, double spherical particles, triple spherical particles, and quadruple spherical particles all have equal diameters, there remains some disparity with the true composition of soil. In subsequent stages, the study will focus on the expression methods of soil properties, such as porosity, uneven-sized particles, and layered compaction in the Discrete Element Model (DEM) to further improve simulation accuracy.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}