
Insertion Performance Study of an Inductive Weft Insertion System for Wide Weaving Machines

 ,
,
Abstract
:1. Introduction
- (1)
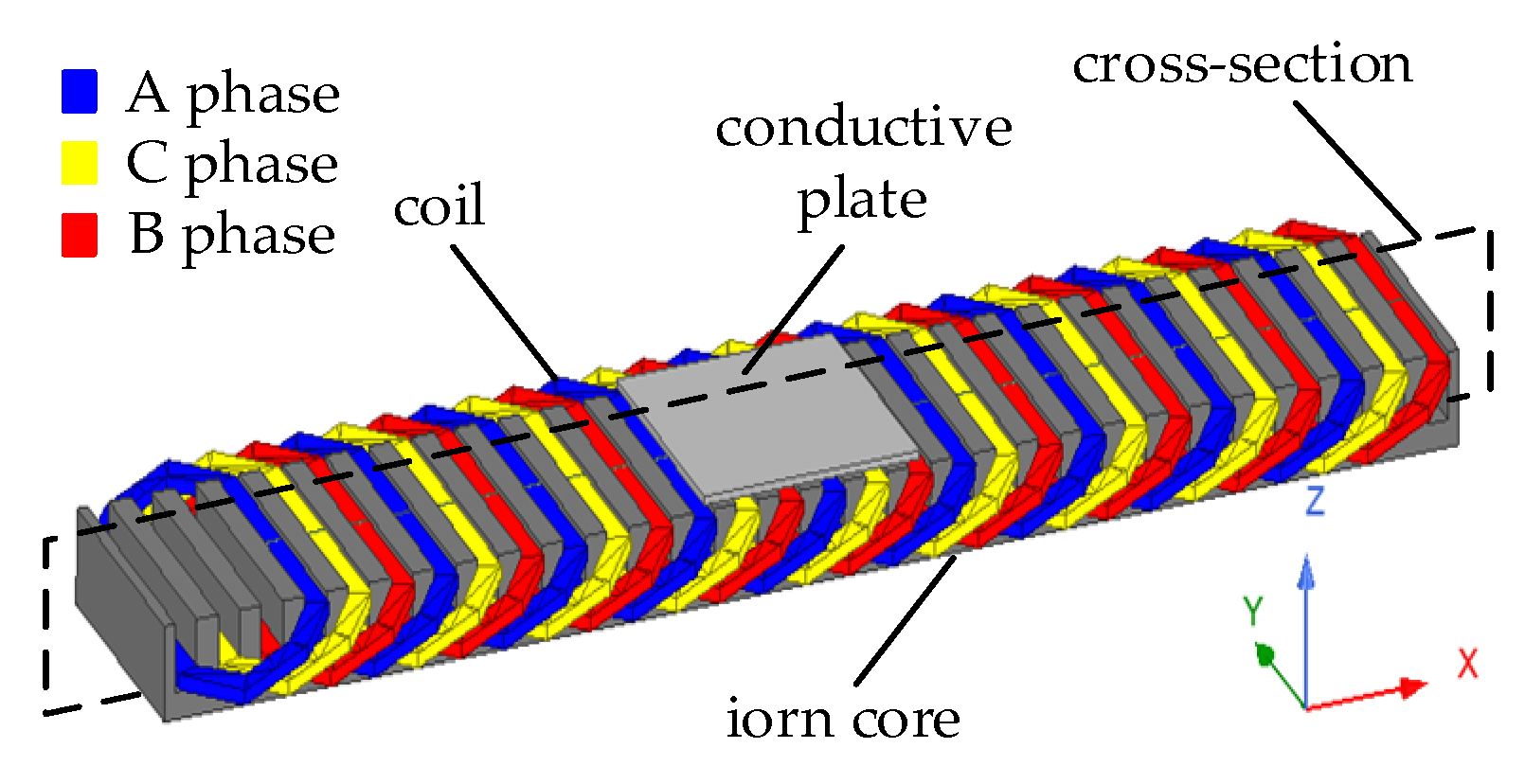
- Using the electromagnetic traction wound around the iron core as the force to pull the shuttle, achieving a super-wide weft insertion can be realized by increasing the length of the coil and the iron core, no longer restricted by the initial velocity of the shuttle. Moreover, since the installation position of the weft insertion guideway is below the warp threads, it is not limited by the size of the shuttle opening, making the design of the weft insertion guideway more flexible and convenient to install.
- (2)
- Utilizing the levitation force generated by high-temperature superconductors in the magnetic field of the permanent magnet array to support the suspended shuttle, there is no actual contact between the shuttle and the weft insertion guideway and warp threads. This eliminates issues such as wear, heating, noise, and vibration caused by friction during the weft insertion process, contributing to an extended equipment lifespan.
2. Weft Insertion System Structure and Operating Principles
3. Calculation of Weft Insertion Performance Parameters
3.1. Equivalent Circuit of the Weft Insertion System
3.2. The Calculation of Warp Insertion Performance
4. Results Analysis and Validation
4.1. Simulation Verification
4.2. Experimental Verification
5. Conclusions
- (1)
- After applying three-phase AC power, the electromagnetic coils continuously generate a rapidly moving unidirectional magnetic field. This field consistently provides stable traction force to the suspended shuttle during the warp insertion process, allowing the weaving machine to achieve a wide warp insertion width without being constrained by the initial velocity of the shuttle.
- (2)
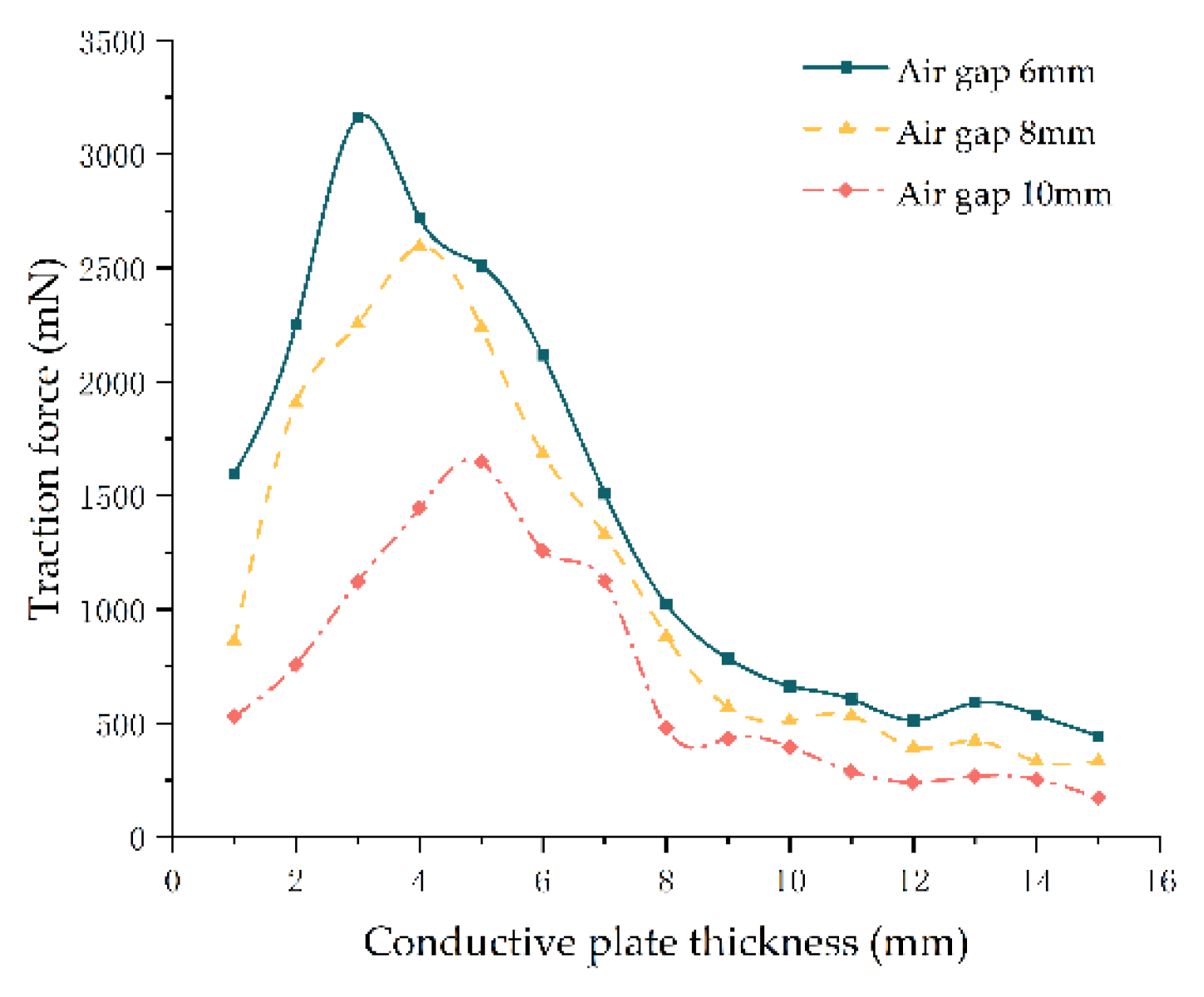
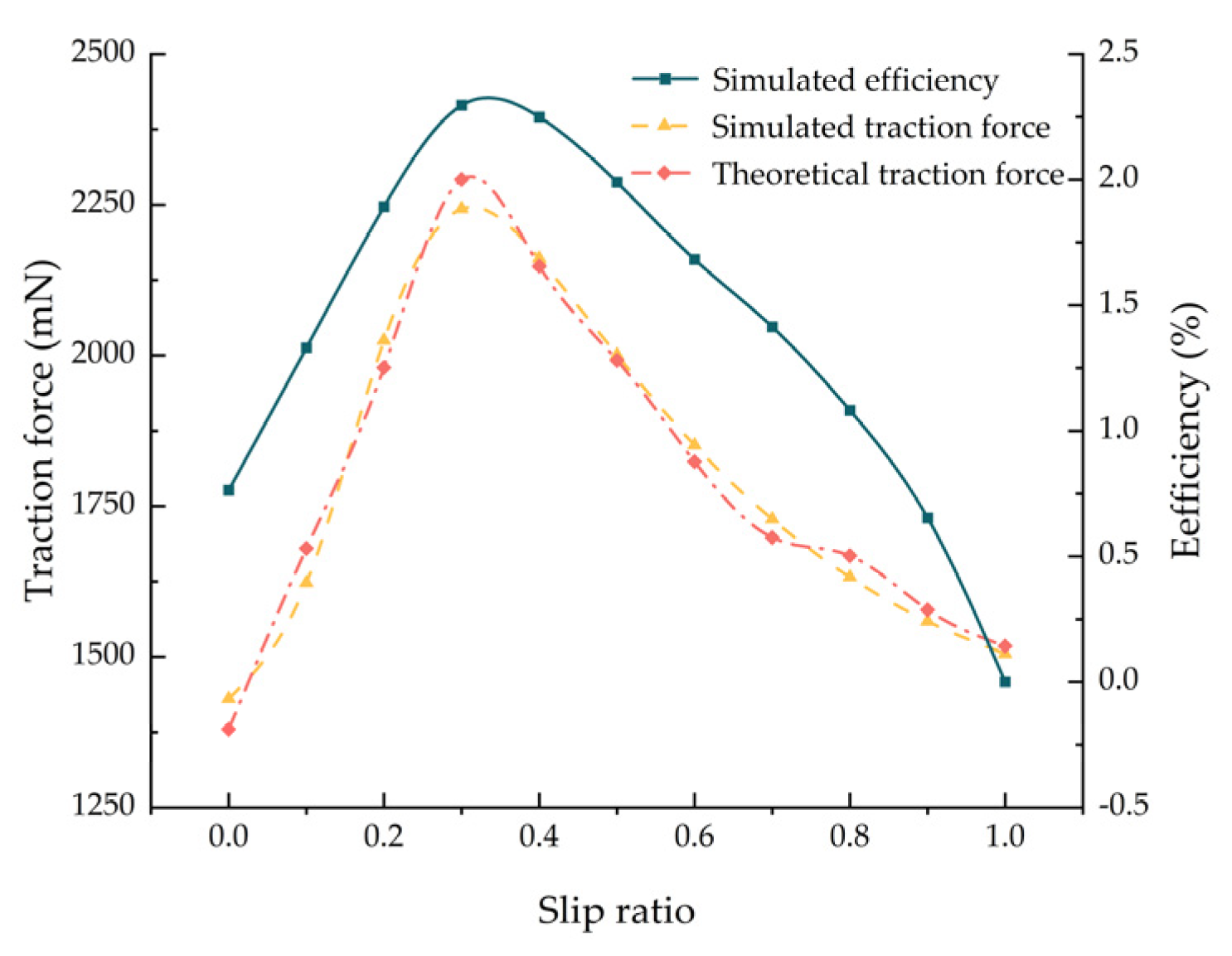
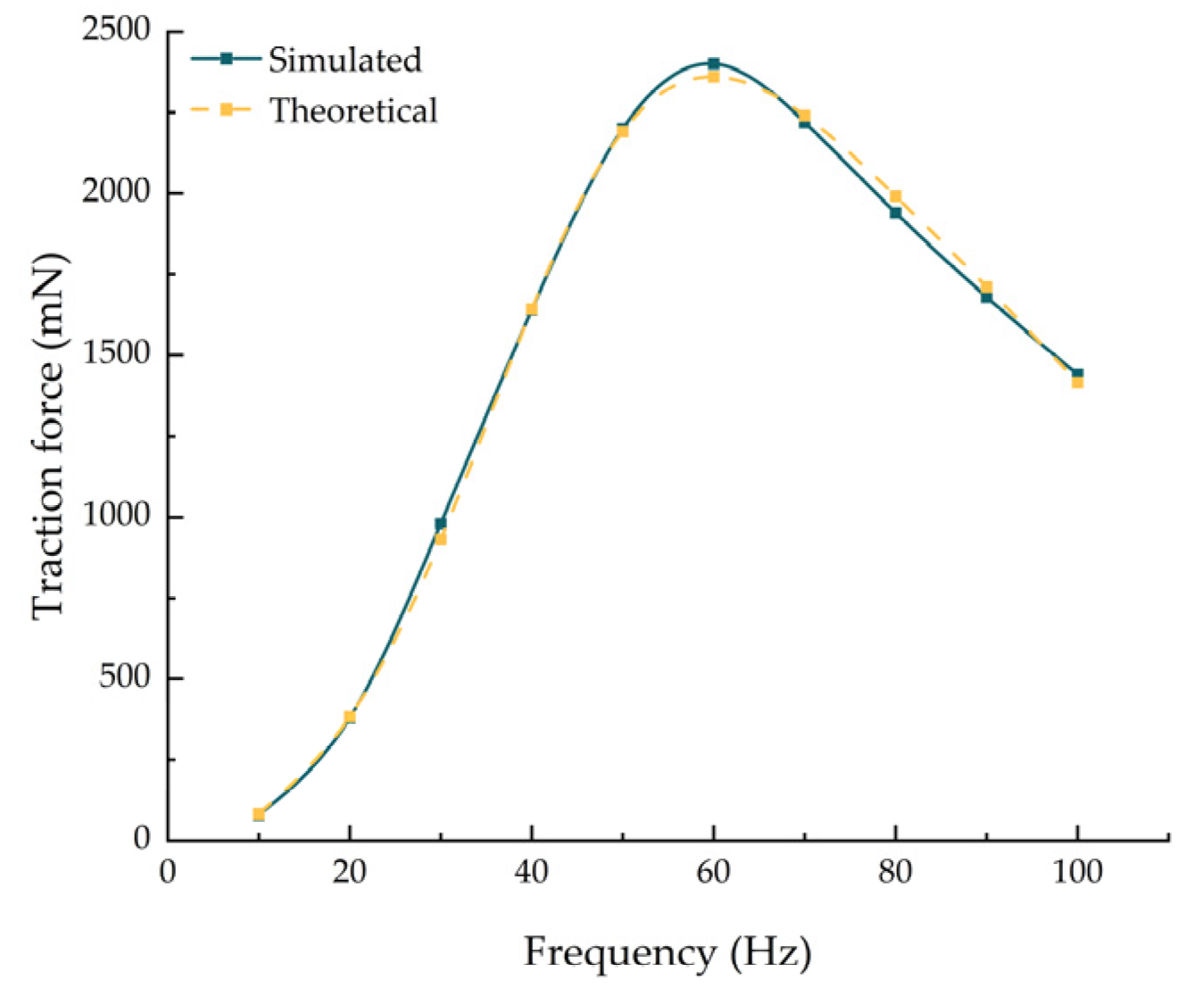
- This study investigated the impact of various parameters, including shuttle structure, misalignment ratio, and current frequency, on the performance of the warp insertion guideway. The optimal design parameters for the warp insertion system, aiming to achieve maximum traction force and minimize energy loss, were determined: a shuttle suspension height of 10 mm, a thickness of 5 mm for the shuttle conductive plate, a misalignment ratio of 0.3, and a current frequency of 60 Hz. These findings provide a theoretical foundation for the application of the inductive warp insertion system in wide weaving machines.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cherston, J.; Veysset, D.; Sun, Y.; Wilbert, J.H.S.; Yano, H.; Nelson, K.A.; Murari, S.; Paradiso, J.A. Large-area electronic skins in space: Vision and preflight characterization for first aerospace piezoelectric e-textile. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2020, Online, 27 April–8 May 2020; pp. 239–252. [Google Scholar]
- Daria, M.; Krzysztof, L.; Jakub, M. Characteristics of biodegradable textiles used in environmental engineering: A comprehensive review. J. Clean. Prod. 2020, 268, 122129. [Google Scholar] [CrossRef]
- Liu, Y.; Zwingmann, B.; Schlaich, M. Carbon fiber reinforced polymer for cable structures—A review. Polymers 2015, 7, 2078–2099. [Google Scholar] [CrossRef]
- Xu, Q.; Mei, S.; Yan, X.; Islam, M.M.; Chen, Z.; Wang, S.; Zhang, Z. Analysis of the magnetic field and electromagnetic force of a non-striking weft insertion system for super broad-width looms, based on an electromagnetic launcher. Text. Res. J. 2019, 89, 4620–4631. [Google Scholar] [CrossRef]
- Markus, G. Gripper Head for the Insertion of Weft Threads on a Gripper Weaving Machine. U.S. Patent 8,875,747(B2), 4 November 2014. [Google Scholar]
- Mirjalili, S.A. Using Electromagnetic Force in Weft Insertion of a Loom. Fibres Text. East. Eur. 2005, 13, 67–70. [Google Scholar]
- Owlia, E.; Mirjalili, S.A. The effect of launcher parameters on the projectile velocity in laboratory electromagnetic weft insertion system. J. Text. Inst. 2021, 112, 1232–1239. [Google Scholar] [CrossRef]
- Owlia, E.; Mirjalili, S.A.; Shahnazari, M. Design and modeling of an electromagnetic launcher for weft insertion system. Text. Res. J. 2019, 89, 834–844. [Google Scholar] [CrossRef]
- Owlia, E. Optimization of the projectile velocity in electromagnetic weft insertion system by genetic algorithm. J. Text. Inst. 2023, 114, 364–370. [Google Scholar] [CrossRef]
- Xu, Q.; Cui, X.; Mei, S.; He, Y.; Chen, Z.; Meng, F. Structural Performance Optimization Design of Continuously Accelerating Electromagnetic Weft Insertion System. Appl. Sci.—Basel 2022, 12, 3611. [Google Scholar] [CrossRef]
- Hossain, M.m.; Hossain, N.; Naim, A.M.E. Thread breakage in modern loom and efficiency. Int. J. Curr. Sci. Res. Rev. 2020, 2, 24–35. [Google Scholar] [CrossRef]
- Gulcan, S.; Rifat, A.H.; Mine, A.; Recep, E. Warp tension distribution over the warp width and its effect on fabric’s breaking strength distribution over the fabric width in woven fabrics. Tekst. Ve Konfeksiyon 2011, 21, 36–41. [Google Scholar]
- Zhang, Z.; Liu, H.; Song, T.; Zhang, Q.; Yang, L.; Bi, K. One dimensional analytical model considering end effects for analysis of electromagnetic pressure characteristics of annular linear induction electromagnetic pump. Ann. Nucl. Energy 2022, 165, 108766. [Google Scholar] [CrossRef]
- Samimi, M.; Hassannia, A. Investigation of Multi-Layer Secondary Concept of an Electromagnetic Launcher. IEEE Trans. Energy Convers. 2022, 37, 921–926. [Google Scholar] [CrossRef]
- Wang, H.; Feng, H.; Xu, X.; Si, J. Modeling analysis and parameters calculation of permanent magnet linear synchronous motor. J. Comput. 2013, 8, 463–470. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Parameter | Project | Parameter |
|---|---|---|---|
| Iron Core Material | Silicon Steel DW-465 | Winding Turns | 96 |
| Iron Core Width (mm) | 100 | Warp Insertion Pole Pairs | 10 |
| Iron Core Length (mm) | 600 | Conductor Plate Material | Aluminum |
| Iron Core Height (mm) | 35 | Conductor Plate Width (mm) | 100 |
| Iron Core Tooth Width (mm) | 10 | Conductor Plate Thickness (mm) | 100 |
| Iron Core Tooth Height (mm) | 25 | Conductor Plate Thickness (mm) | 1–20 |
| Iron Core Slot Width (mm) | 10 | Air Gap Height (mm) | 10 |
| Winding Material | Copper | Power Supply Frequency | 10~100 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Liu, Y.; Peng, Y.; Wang, Y.; Li, C.; Zuo, X.; Xu, C.; Zhou, X. Insertion Performance Study of an Inductive Weft Insertion System for Wide Weaving Machines. Appl. Sci. 2024, 14, 2687. https://doi.org/10.3390/app14072687
Zhang C, Liu Y, Peng Y, Wang Y, Li C, Zuo X, Xu C, Zhou X. Insertion Performance Study of an Inductive Weft Insertion System for Wide Weaving Machines. Applied Sciences. 2024; 14(7):2687. https://doi.org/10.3390/app14072687
Chicago/Turabian StyleZhang, Chengjun, Yue Liu, Yi Peng, Yi Wang, Chengyuan Li, Xiaoyan Zuo, Chuqiao Xu, and Xiangyang Zhou. 2024. "Insertion Performance Study of an Inductive Weft Insertion System for Wide Weaving Machines" Applied Sciences 14, no. 7: 2687. https://doi.org/10.3390/app14072687