
Research on the Vehicle-Behavior Boundary of Intersection Traffic Based on Naturalistic Driving Data Study


Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
3.1. Collection of Naturalistic Driving Data
- This dataset contains 80,000 infrastructure-view scenarios, 100,000 vehicle-view scenarios, and 50,000 cooperative-view scenarios mined from 672 h of data from 28 intelligent perception intersections in the Beijing High-Level Automated Driving Demonstration Area.
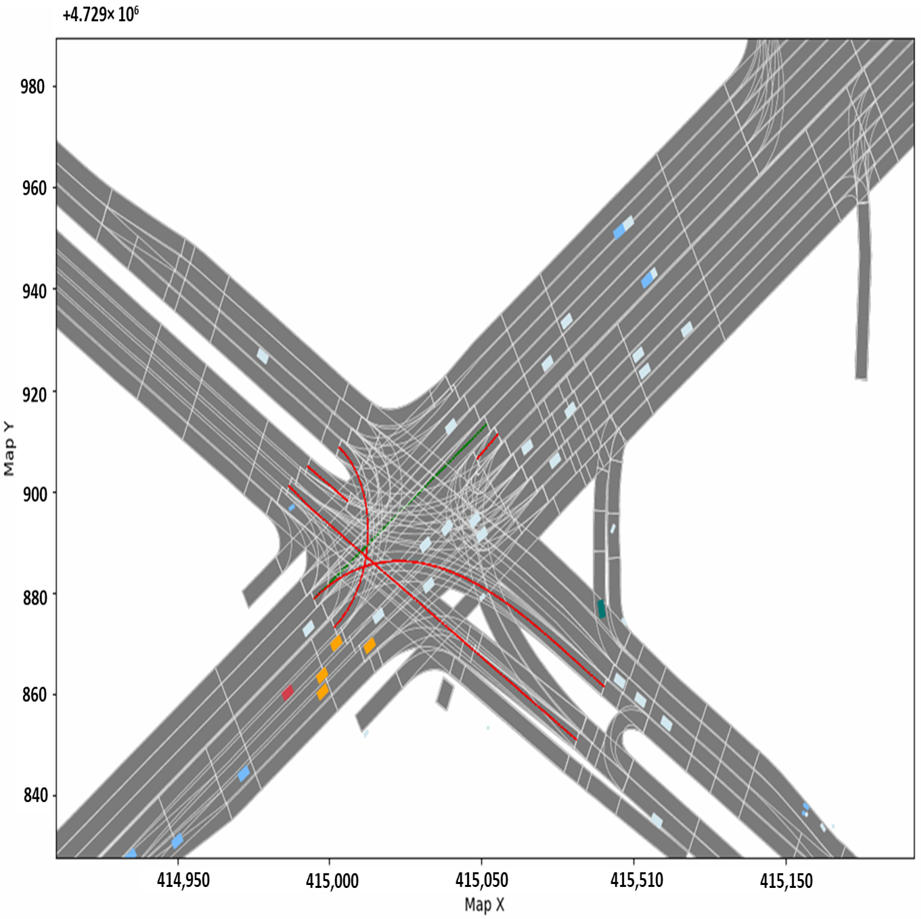
- For research convenience and privacy protection, all trajectories, and traffic lights are uniformly transformed to a virtual-world coordinate system, and the origin of the virtual-world coordinate system is located at a random point on earth, with the x–y plane parallel to the ground plane, and the z axis positive in the upward direction, shown in Figure 1.
- Each scenario contains 10 s with 10 Hz from 8 classes of object tracks generated automatically from raw sensor data, which includes Car, Truck, Van, Bus, Pedestrian, Cyclist, Tricyclist and Motorcyclist.
3.2. Selection of Intersection Traffic Data
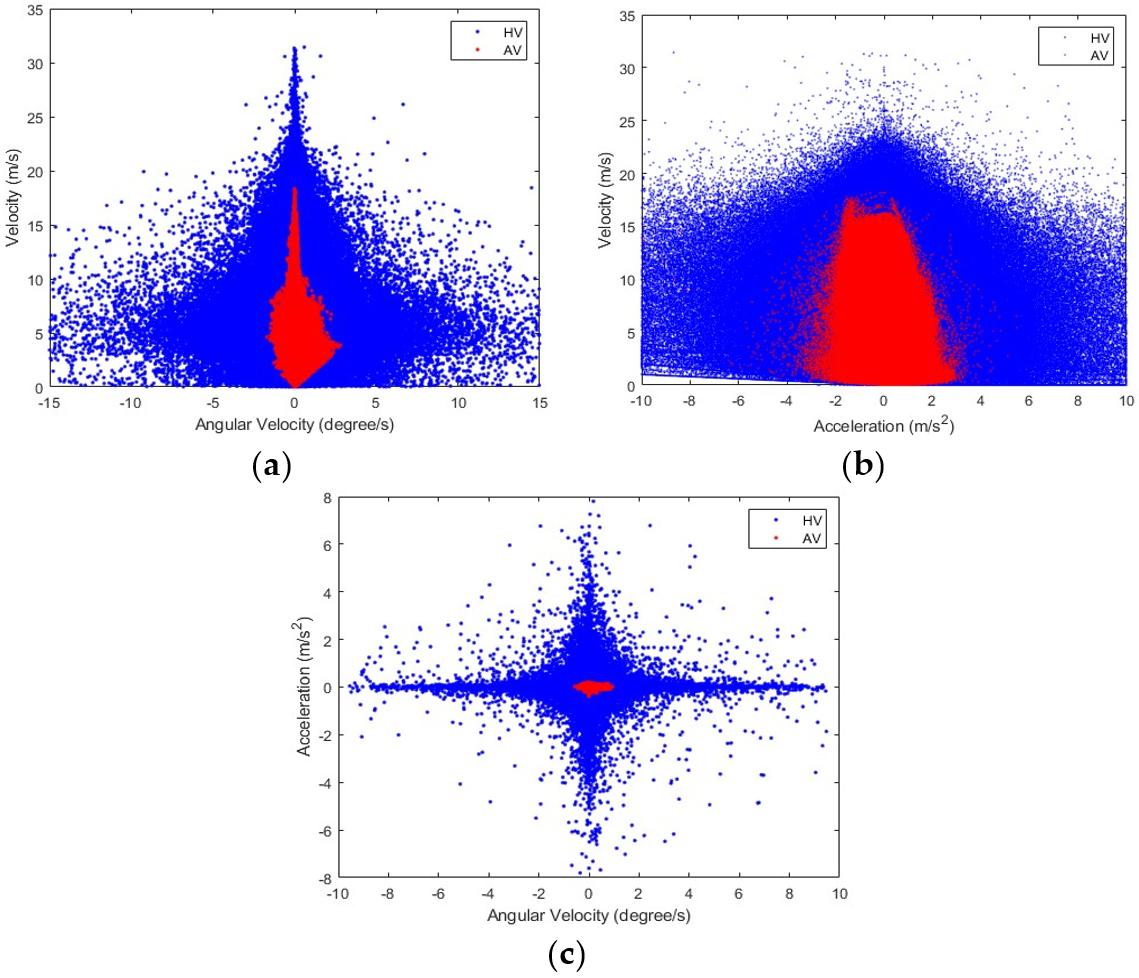
3.3. Extraction of Vehicle Dynamic Parameters
3.4. Kernel Density Estimation
4. Results
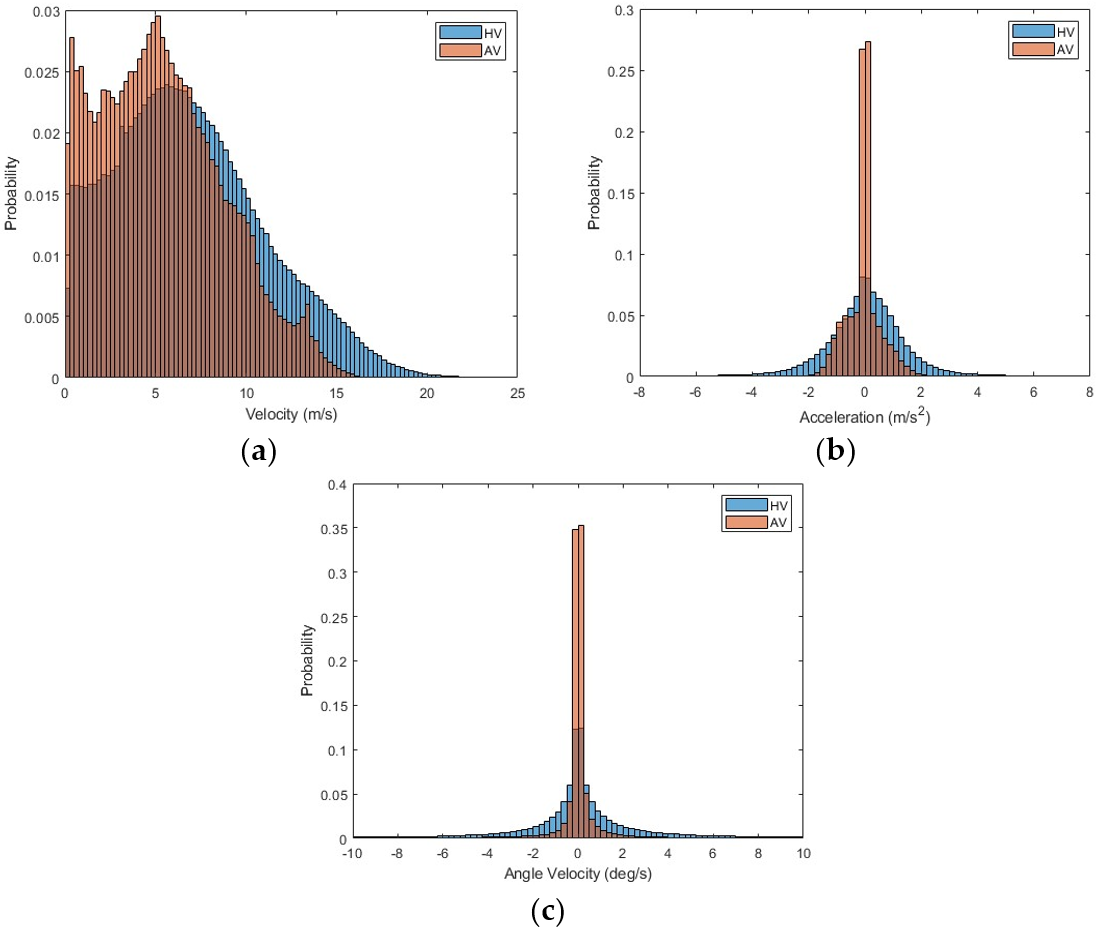
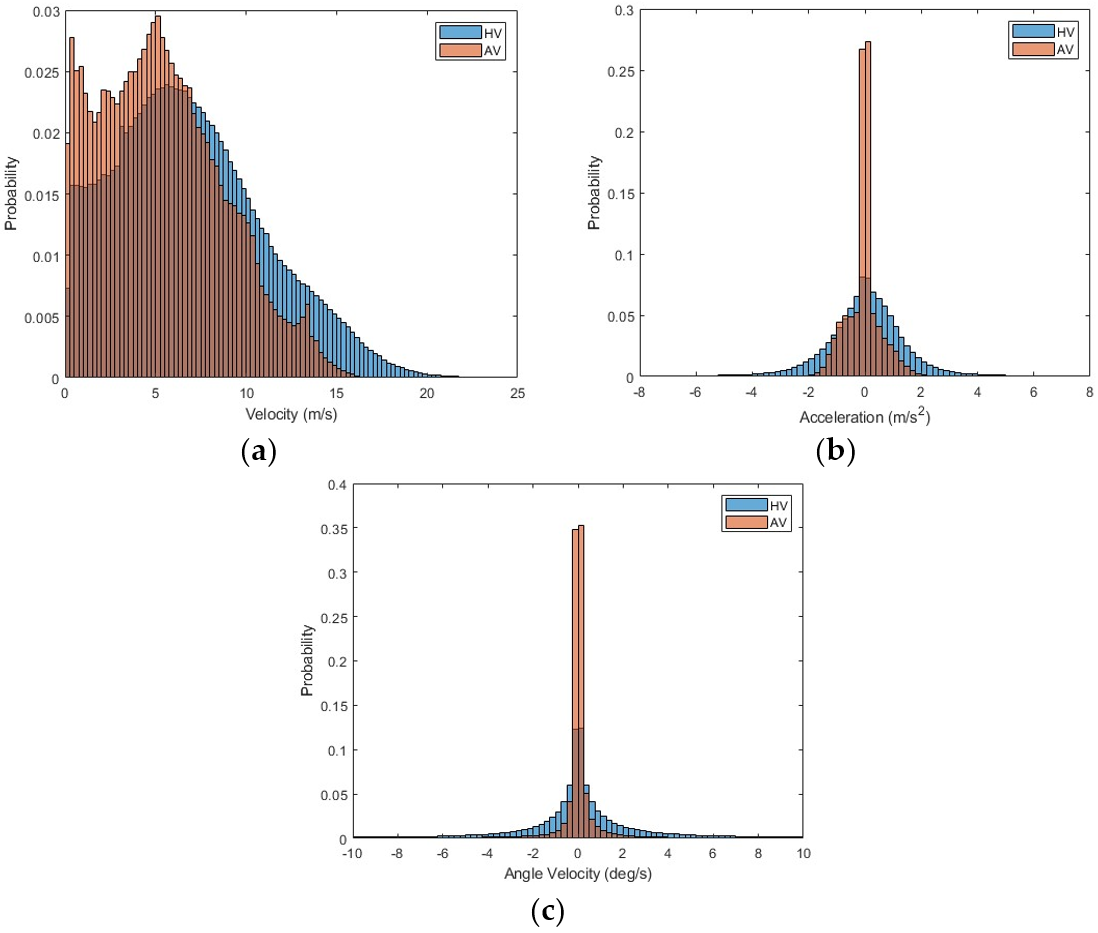
4.1. Probability Distribution of Vehicle Driving Parameters
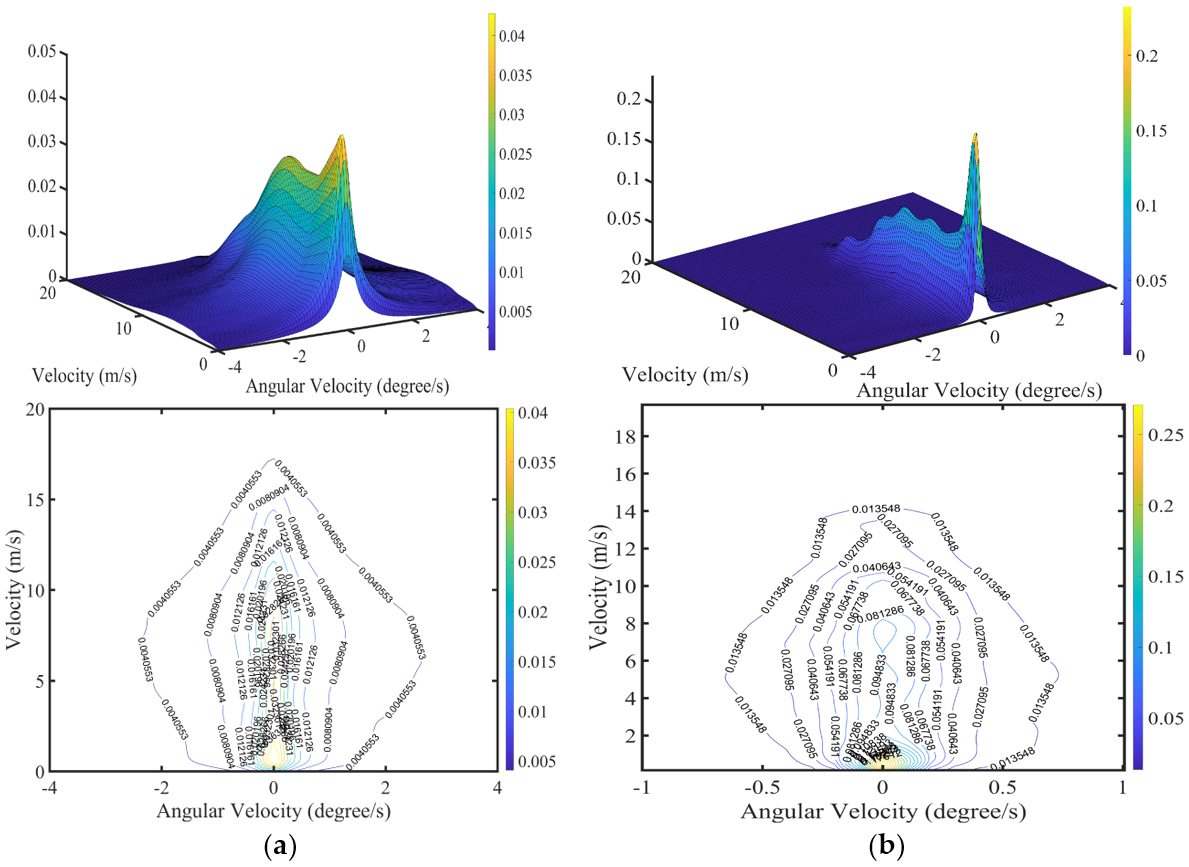
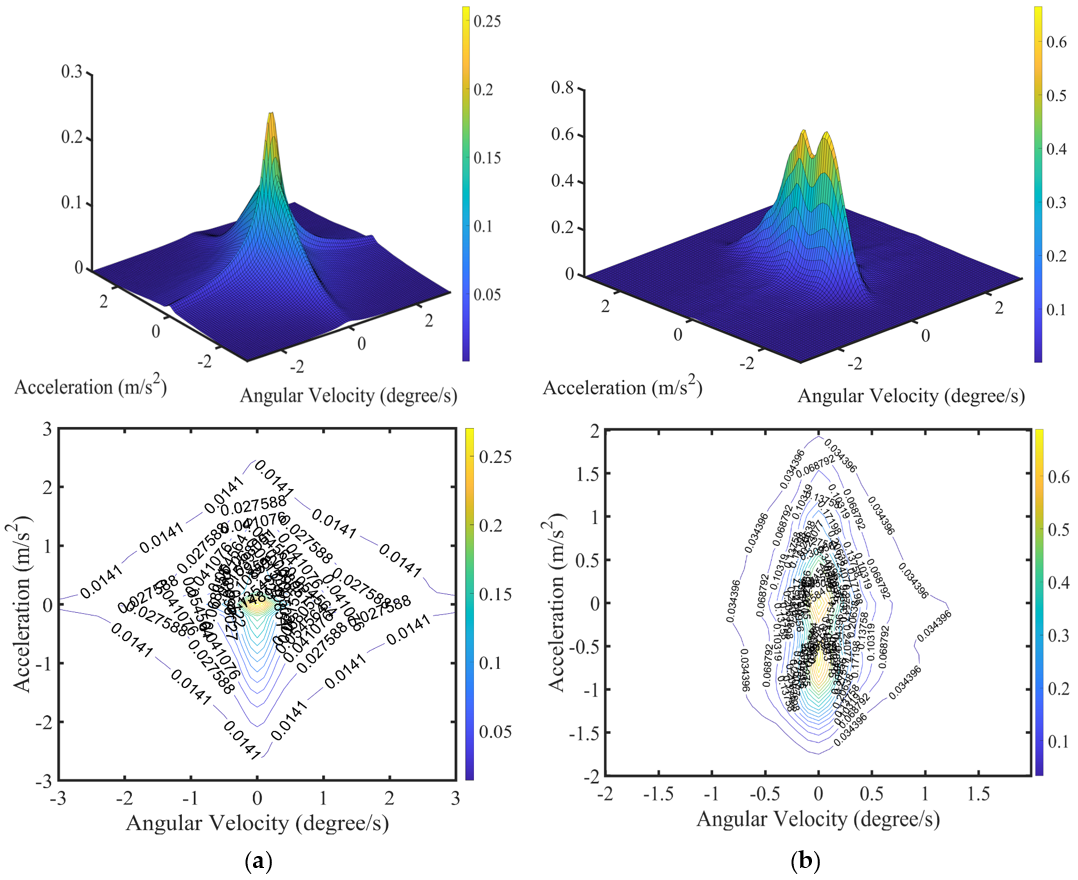
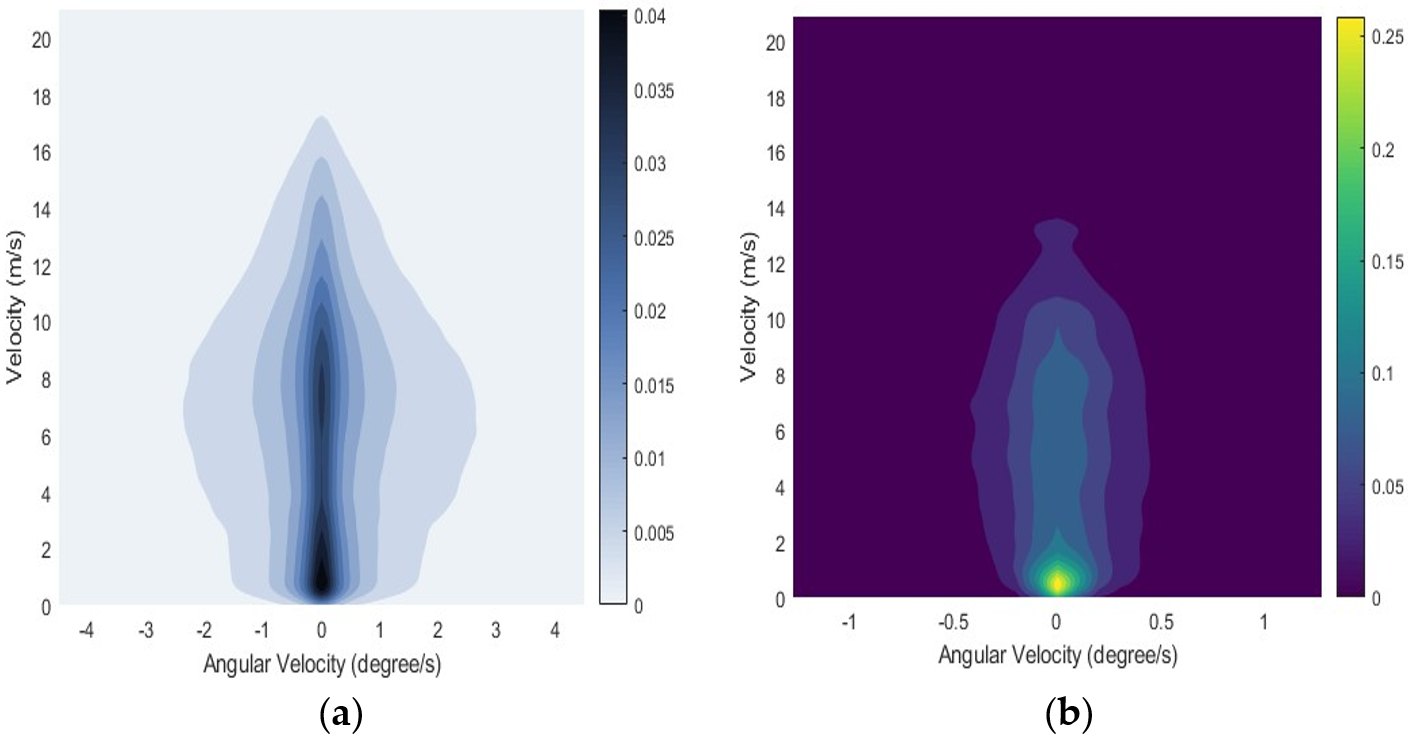
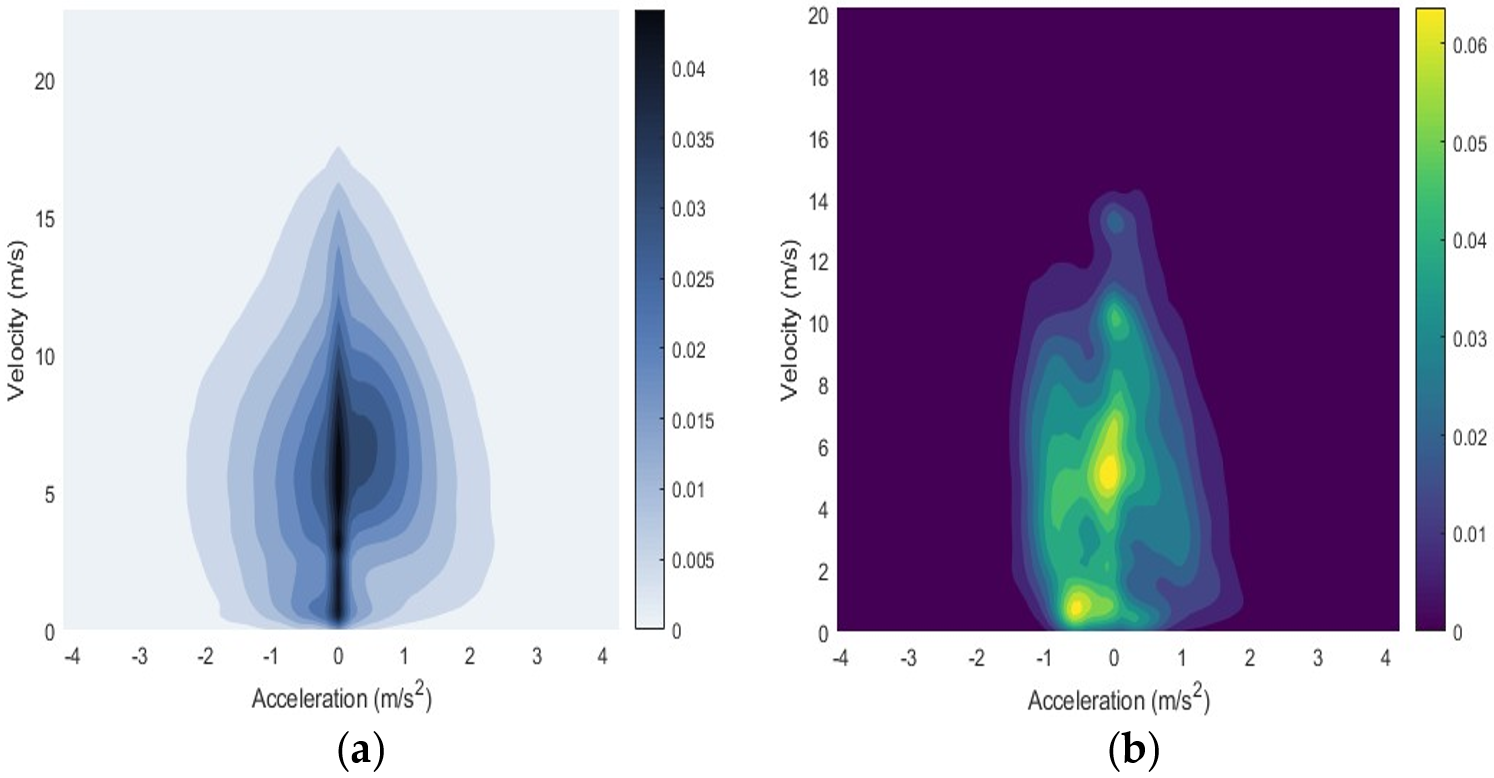
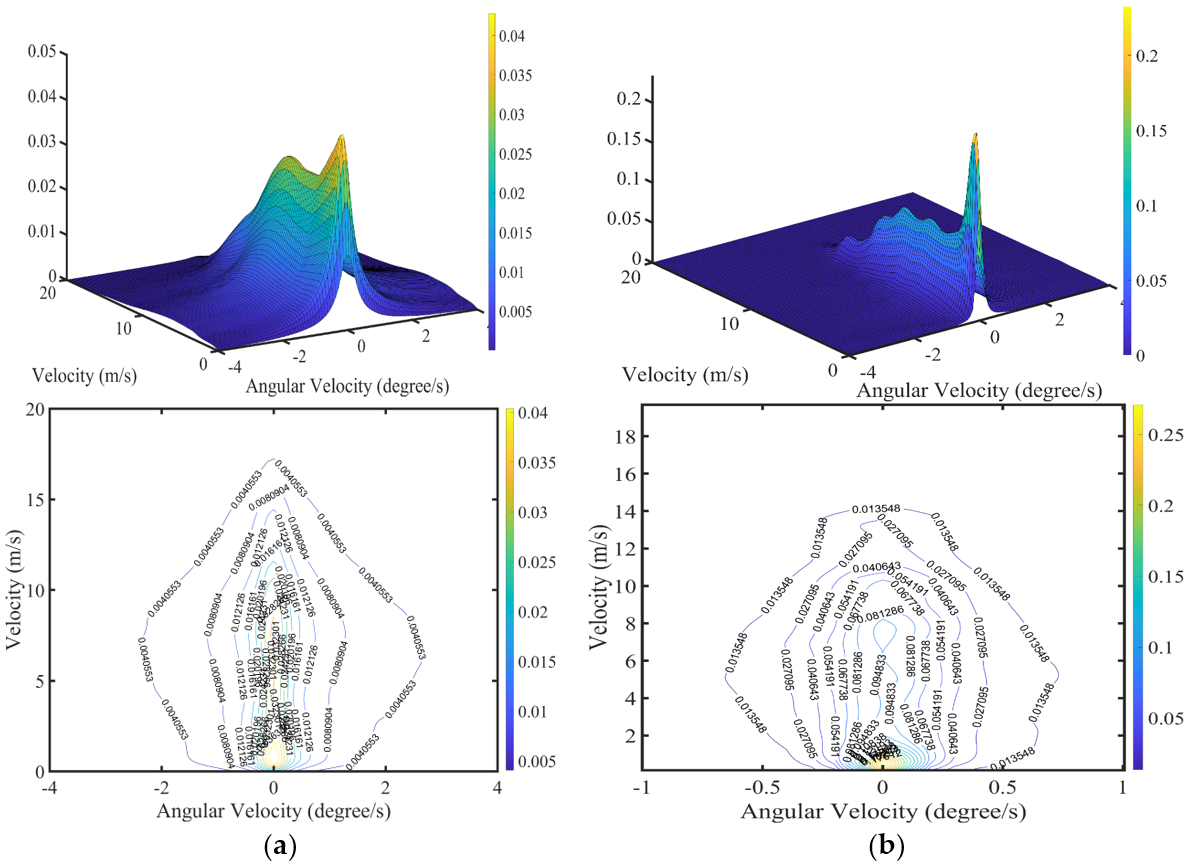
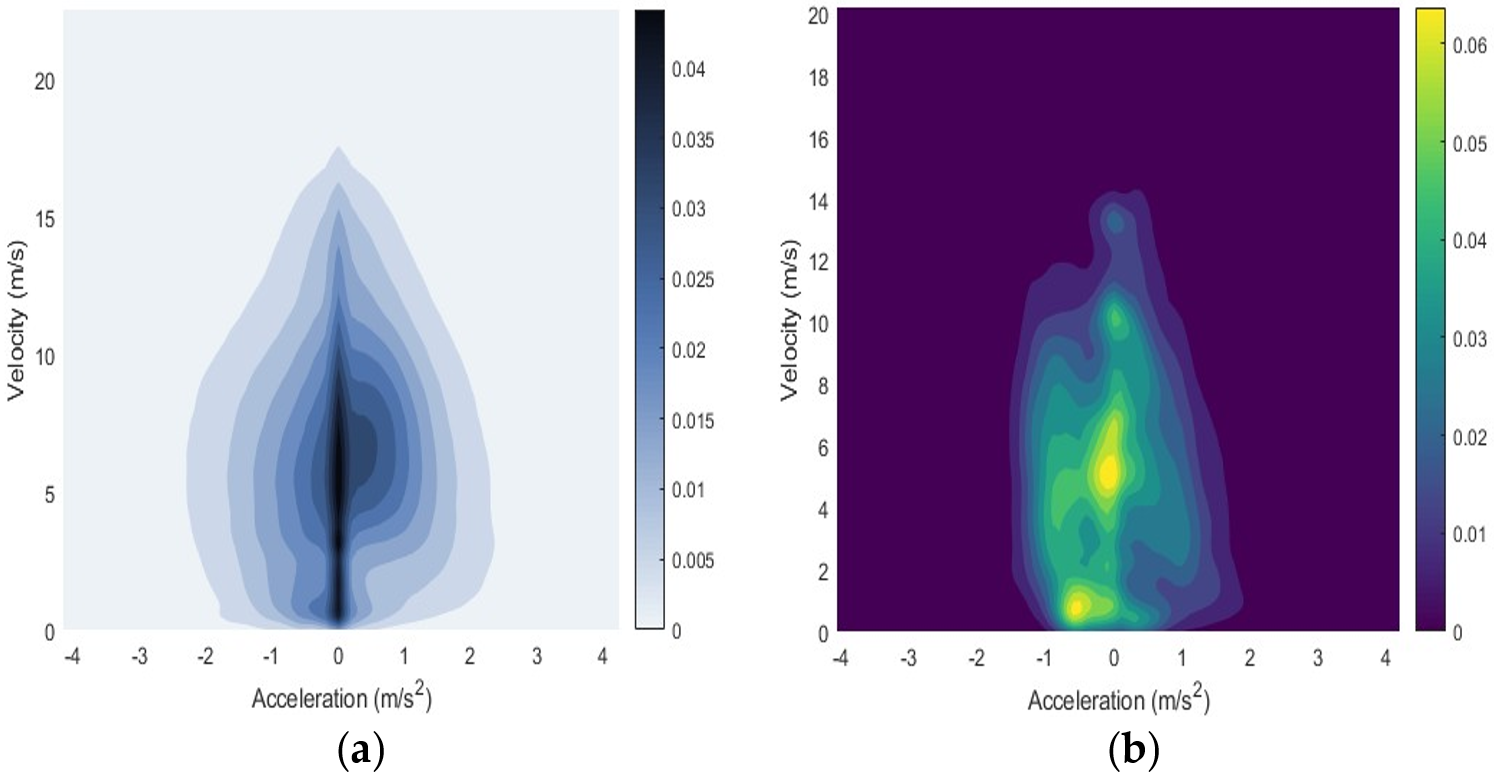
4.2. Joint Probability-Density Distribution of Vehicle Driving Parameters
4.3. Behavior Boundary of Vehicle-Behavior Charateristic
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Agafonov; Yumaganov, A. 3D Objects Detection in an Autonomous Car Driving Problem. In Proceedings of the 2020 International Conference on Information Technology and Nanotechnology (ITNT), Samara, Russia, 26–29 May 2020; pp. 1–5. [Google Scholar]
- Zumd, J.; Sener, I.N.; Wagner, J. Revolutionizing Our Roadways Consumer Acceptance and Travel Behavior Impacts of Automated Vehicles; Texas A&M Transportation Institute: College Station, TX, USA, 2016. [Google Scholar]
- Duan, X.; Jiang, H.; Tian, D.; Zou, T.; Zhou, J.; Cao, Y. V2I based environment perception for autonomous vehicles at intersections. China Commun. 2021, 18, 1–12. [Google Scholar] [CrossRef]
- Guneshka, S.; Daniel, B.; Zöllner, J.M. One ontology to rule them all: Corner case scenarios for autonomous driving. In Proceedings of the European Conference on Computer Vision; Tel Aviv, Israel, 23–27 October 2022, Springer Nature: Cham, Switzerland, 2022. [Google Scholar]
- Bogdoll, D.; Breitenstein, J.; Heidecker, F.; Bieshaar, M.; Sick, B.; Fingscheidt, T.; Zöllner, J.M. Description of corner cases in automated driving: Goals and challenges. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021. [Google Scholar]
- Biao, W.; Xichan, Z.; Maozhu, L.; Rui, L. Safety boundary condition model based on vehicle intersection conflict and collision. J. Tianjin Norm. Univ. 2019, 39, 62–66. [Google Scholar]
- Federal Highway Administration. About Intersection Safety. Available online: https://safety.fhwa.dot.gov/intersection/about/index.cfm (accessed on 18 August 2020).
- United States Department of Transportation. Intersection Safety. Available online: https://highways.dot.gov/research/research-programs/safety/intersection-safety (accessed on 2 May 2023).
- National Highway Traffic Safety Administration. National Automotive Sampling System (NASS) General Estimates System (GES) Analytical User’s Manual 1988–2015; National Highway Traffic Safety Administration (NHTSA): Washington, DC, USA, 2016. [Google Scholar]
- China Automotive Technology and Research Center Co., Ltd. (CATARC). White Paper on Traffic Safety of Autonomous Vehicles; China Automotive Technology and Research Center Co., Ltd. (CATARC): Tianjin, China, 2021. [Google Scholar]
- Insurance Institute for Highway Safety, Highway Loss Data, Fatality Facts 2018 Urban/rural Comparison. Available online: https://www.iihs.org/topics/fatality-statistics/detail/urban-rural-comparison (accessed on 1 May 2019).
- ISO/PAS 21448; 2019 Road Vehicles—Safety of the Intended Functionality. The International Organization for Standardization: Geneva, Switzerland, 2019.
- ECE TRANS WP.29 GRVA. Proposal for the Future Certification of Automated/Autonomous Driving Systems [EB/OL]. Available online: https://www.unece.org/trans/main/wp29/wp29wgs/wp29grva/grva2019.html (accessed on 1 September 2019).
- Rinaldi, G.; Menon, P.P.; Edwards, C. Suboptimal Sliding Mode-based Heading and Speed Guidance Scheme for Boundary Tracking with Autonomous Vehicle. In Proceedings of the 2021 American Control Conference, Virtual, 25–28 May 2021. [Google Scholar]
- Mao, L.; Li, W.; Hu, P.; Zhou, G.; Zhang, H.; Dai, J. Design of Real-Time Dynamic Reversible Lane in Intelligent Cooperative Vehicle Infrastructure System. J. Adv. Transp. 2020, 2, 8838896. [Google Scholar] [CrossRef]
- Cai, J.; Huang, R.; Huang, Z. Optimization of variable lane considering reduction of capacity. J. Cent. South Univ. Sci. Technol. 2018, 49, 1838–1844. [Google Scholar]
- Ma, D.; Xiao, J.; Song, X.; Ma, X.; Jin, S. A Back-Pressure-Based Model with Fixed Phase Sequences for Traffic Signal Optimization Under Oversaturated Networks. IEEE Trans. Intell. Transp. Syst. 2020, 99, 5577–5588. [Google Scholar] [CrossRef]
- Zhou, X. Design and Development of Vehicle Navigation System Based on Intersection Safety. Master’s Thesis, Shandong University of Technology, Zibo, China, 2013. [Google Scholar]
- Van Schagen, I.; Welsh, R.; Backer-Grøndahl, A.; Sagberg, F.; Tsippy, L.; Hoedemae, M.; Morris, A. Towards a Large-Scale European Naturalistic Driving study: Main Findings of PROLOGUE. PROLOGUE Deliverable D4.2; SWOV Institute for Road Safety Research: Leidschendam, The Netherlands, 2011. [Google Scholar]
- Welsh, R.; Reed, S.; Talbot, R.; Morris, A. Data collection, analysis methods and equipment for naturalistic studies and requirements for the different application areas. In PROLOGUE Deliverable D2.1; Loughborough University: Loughborough, UK, 2010. [Google Scholar]
- Backer, G.; Lotan, T.; Van, I. Summary and integration of a series of Naturalistic Driving field trials. In PROLOGUE Deliverable D3.7; TOI Institute of Transport Economics: Oslo, Norway, 2011. [Google Scholar]
- Ingrid, S.; Fridulv, S. The Potential Benefits of Naturalistic Driving for Road Safety Research: Theoretical and Empirical Considerations and Challenges for the Future. Procedia—Soc. Behav. Sci. 2012, 48, 692–701. [Google Scholar]
- Liu, L.; Zhu, X.; Chen, M.; Ma, Z. A Systematic Scenario Typology for Automated Vehicles Based on China-FOT. In WCX World Congress Experience; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Najm, W.G.; Smith, J.D.; Yanagisawa, M. Pre-Crash Scenario Typology for Crash Avoidance Research; United States National Highway Traffic Safety Administration: Washington, DC, USA, 2007. [Google Scholar]
- Google. Waymo [EB/OL]. Available online: www.waymo.com (accessed on 1 December 2023).
- Carmen, R.; Joris, D.; Felix, F.; AdaptIVe subprojects. AdaptIVe Final Report Deliverable D1.0. AdaptIVe Consortium. Available online: https://www.adaptive-ip.eu/files/adaptive/content/downloads/AdaptIVe-SP1-v1-0-DL-D1-0-Final_Report.pdf (accessed on 1 May 2017).
- Jensen, M.B.; Møgelmose, A.; Moeslund, T.B. Presenting the multi-view traffic intersection dataset (MTID): A detailed traffic-surveillance dataset. In Proceedings of the IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar]
- Schuldt, F.; Reschka, A.; Maurer, M. A method for an efficient, systematic test case generation for advanced driver assistance systems in virtual environments. In Automotive Systems Engineering II; Springer: Cham, Switzerland, 2008; pp. 147–175. [Google Scholar]
- Xu, X.; Zhou, Z.; Hu, W.; Xiao, L.; Li, W.; Wang, S. AEB intersection test scenario based on accident data mining. J. Beijing Univ. Aeronaut. Astronaut. 2020, 46, 1817–1825. [Google Scholar]
- Xiangyang, X.; Wenhao, H.; Honglei, D. A review of key technologies for constructing autonomous vehicle test scenarios. Automot. Eng. 2021, 43, 610–619. [Google Scholar]
- Zhang, S.; He, Z.; Liao, J.; Li, P.; Xiao, L.; Xu, Q. Research on intersection test scenarios of AEB system based on NAIS. Traffic Inf. Saf. 2021, 39, 87–96. [Google Scholar]
- Liao, J.; Zhang, D.; Gao, L.; Liao, W. Research on dangerous scenarios at T-intersections based on NAIS accident data clustering. J. Automot. Saf. Energy 2021, 12, 336–345. [Google Scholar]
- Sun, X.; Zhu, X.; Zhang, K.; Li, L.; Ma, Z.; Wang, D. Automatic detection method research of incidents in China-FOT database. In Proceedings of the 2016 IEEE 19th International Conference of the Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 754–759. [Google Scholar]
- Yan, Y.; Zhu, X.; Liao, M.; Ma, Z. Danger Degree Evaluation Method of Crossroad Scenario Based on Naturalistic Driving Analysis. In Proceedings of the 2018 IEEE Intelligent Transportation Systems Conference (ITSC), Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Xuehan, M.; Xichan, Z.; Zhixiong, M. Analysis of intersection traffic classification and violation behavior in natural driving research. In Proceedings of the 14th International Forum of Automotive Traffic Safety, Geneva, Switzerland, 1 December 2017. [Google Scholar]
- Moon, Y.J.; Coleman, F., III. Dynamic dilemma zone based on driver behavior and car-following model at highway–rail intersections. Transp. Res. Part B 2003, 37, 323–344. [Google Scholar] [CrossRef]
- Tawfeek, M.H.; El-Basyouny, K. Location-Based Analysis of Car-Following Behavior During Braking Using Naturalistic Driving Data. Can. J. Civ. Eng. 2019, 47, 498–505. [Google Scholar] [CrossRef]
- Tawfeek, M.H. Human-like Speed Modelling for Autonomous Vehicles during Car-Following at Intersections. Can. J. Civ. Eng. 2021, 49, 255–264. [Google Scholar] [CrossRef]
- Kondoh, T.; Yamamura, T.; Kitazaki, S.; Kuge, N.; Boer, E.R. Identification of Visual Cues and Quantification of Drivers’ Perception of Proximity Risk to the Lead Vehicle in Car-Following Situations. J. Mech. Syst. Transp. Logist. 2008, 1, 170–180. [Google Scholar] [CrossRef]
- Gettman, D.; Head, L. Surrogate Safety Measures from Traffic Simulation Models; FHWA/RD-03-050; Federal Highway Administration, Department of Transportation, U.S.: Washington, DC, USA, 2003. [Google Scholar]
- Allen, B.L.; Shin, B.T.; Cooper, P.J. Analysis of traffic conflicts and collisions. Transp. Res. Rec. J. Transp. Res. 1978, 667, 67–74. [Google Scholar]
- Tang, K.; Nakamura, H. Safety evaluation for intergreen intervals at signalized intersections based on probabilistic methodology. Transp. Res. Rec. J. Transp. Res. 2009, 2128, 226–235. [Google Scholar] [CrossRef]
- Autey, J.; Sayed, T.; Zaki, M. Safety evaluation of right-turn smart channels using automated traffic conflict analysis. Accid. Anal. 2012, 45, 120–130. [Google Scholar] [CrossRef] [PubMed]
- Wu, B.; Ma, Z.; Wei, X.; Zhou, X. Research on The Safety Boundary of Intersection Car-Following Scenarios Based on Naturalistic Driving Behavior Study. In SAE Technical Paper; SAE International: Warrendale, PA, USA, 2022. [Google Scholar]
- Alhajyaseen, W.K.M. The Integration of Conflict Probability and Severity for the Safety Assessment of Intersections. Arab. J. Sci. Eng. 2015, 40, 421–430. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Shi, Y.; Peng, Y.; Fang, J.; Zhao, R.; Zhao, L. Vehicle-to-everything (V2X) services supported by LTE-based systems and 5G. IEEE Commun. Stand. Mag. 2017, 1, 70–76. [Google Scholar] [CrossRef]
- Yu, H.; Luo, Y.; Shu, M.; Huo, Y.; Yang, Z.; Shi, Y.; Guo, Z.; Li, H.; Hu, X.; Yuan, J.; et al. DAIR-V2X: A Large-Scale Dataset for Vehicle-Infrastructure Cooperative 3D Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–24 June 2022. [Google Scholar]
- Yu, H.; Yang, W.; Ruan, H.; Yang, Z.; Tang, Y.; Gao, X.; Hao, X.; Shi, Y.; Pan, Y.; Sun, N.; et al. V2X-Seq: A Large-Scale Sequential Dataset for Vehicle-Infrastructure Cooperative Perception and Forecasting. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023. [Google Scholar]
- Danaher, D.; McDonough, S.; Donaldson, D.; Cochran, R. A Naturalistic Study of Vehicle Acceleration and Deceleration at an Intersection. SAE Int. J. Adv. Curr. Pract. Mobil. 2023, 5, 473–484. [Google Scholar] [CrossRef]
- Ziraldo, E.; Attalla, S.; Kodsi, S.; Oliver, M. Driver Response to Right Turning Path Intrusions at Signalized Intersections. SAE Int. J. Adv. Curr. Pract. Mobil. 2020, 2, 1623–1632. [Google Scholar] [CrossRef]
- Ziraldo, E.; Attalla, S.; Kodsi, S.; Oliver, M. Driver Response to Left Incurring Path Intrusions at Sign-Controlled Intersections. In Proceedings of the WCX SAE World Congress Experience, Detroit, MI, USA, 21–24 April 2020. [Google Scholar]
- Butakov, V.A.; Ioannou, P. Personalized Driver/Vehicle Lane Change Models for ADAS. IEEE Trans. Veh. Technol. 2015, 64, 4422–4431. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Intersection ID Number | Data Collection Duration (min) | Intersection ID Number | Data Collection Duration (min) |
|---|---|---|---|
| 4 | 1819 | 28 | 135 |
| 20 | 1453 | 27 | 133 |
| 12 | 552 | 25 | 123 |
| 13 | 453 | 1 | 62 |
| 14 | 339 | 19 | 49 |
| 7 | 316 | 81 | 27 |
| 11 | 247 | 5 | 22 |
| 2 | 175 | 9 | 10 |
| Parameter | Description |
|---|---|
| ID | Vehicle identification number |
| Time | Elapsed time in milliseconds since 1 January 1970 |
| Intersection_ID | Current intersection position of vehicle |
| X | X Coordinate of the front center of the vehicle based on DAIR-V2X coordinate system |
| Y | Y Coordinate of the front center of the vehicle based on DAIR-V2X coordinate system |
| Angle | Angle between vehicle driving direction and X Coordinate based on DAIR-V2X coordinate system |
| V_X | Vehicle’s instantaneous velocity based on X direction of DAIR-V2X coordinate system |
| V_Y | Vehicle’s instantaneous velocity based on Y direction of DAIR-V2X coordinate system |
| V | Vehicle’s instantaneous velocity in m/s |
| Acceleration | Vehicle’s instantaneous velocity in m/s2 |
| Angular Velocity | Vehicle’s instantaneous angular velocity in degree/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, B.; Ma, Z.; Zhu, X.; Lin, Y. Research on the Vehicle-Behavior Boundary of Intersection Traffic Based on Naturalistic Driving Data Study. Appl. Sci. 2024, 14, 3432. https://doi.org/10.3390/app14083432
Wu B, Ma Z, Zhu X, Lin Y. Research on the Vehicle-Behavior Boundary of Intersection Traffic Based on Naturalistic Driving Data Study. Applied Sciences. 2024; 14(8):3432. https://doi.org/10.3390/app14083432
Chicago/Turabian StyleWu, Biao, Zhixiong Ma, Xichan Zhu, and Yu Lin. 2024. "Research on the Vehicle-Behavior Boundary of Intersection Traffic Based on Naturalistic Driving Data Study" Applied Sciences 14, no. 8: 3432. https://doi.org/10.3390/app14083432
APA StyleWu, B., Ma, Z., Zhu, X., & Lin, Y. (2024). Research on the Vehicle-Behavior Boundary of Intersection Traffic Based on Naturalistic Driving Data Study. Applied Sciences, 14(8), 3432. https://doi.org/10.3390/app14083432