
Analysis of Three-Dimensional Micro-Contact Morphology of Contact Groups Based on Superpixel AMR Morphological Features and Fractal Theory

 and
and
Abstract
1. Introduction
2. Construction of the Contact Group Contact Model
2.1. Application of Differential Planes in Fractal Contact Models
2.2. Morphological Feature Extraction of Contact Groups
2.2.1. Image Denoising Preprocessing
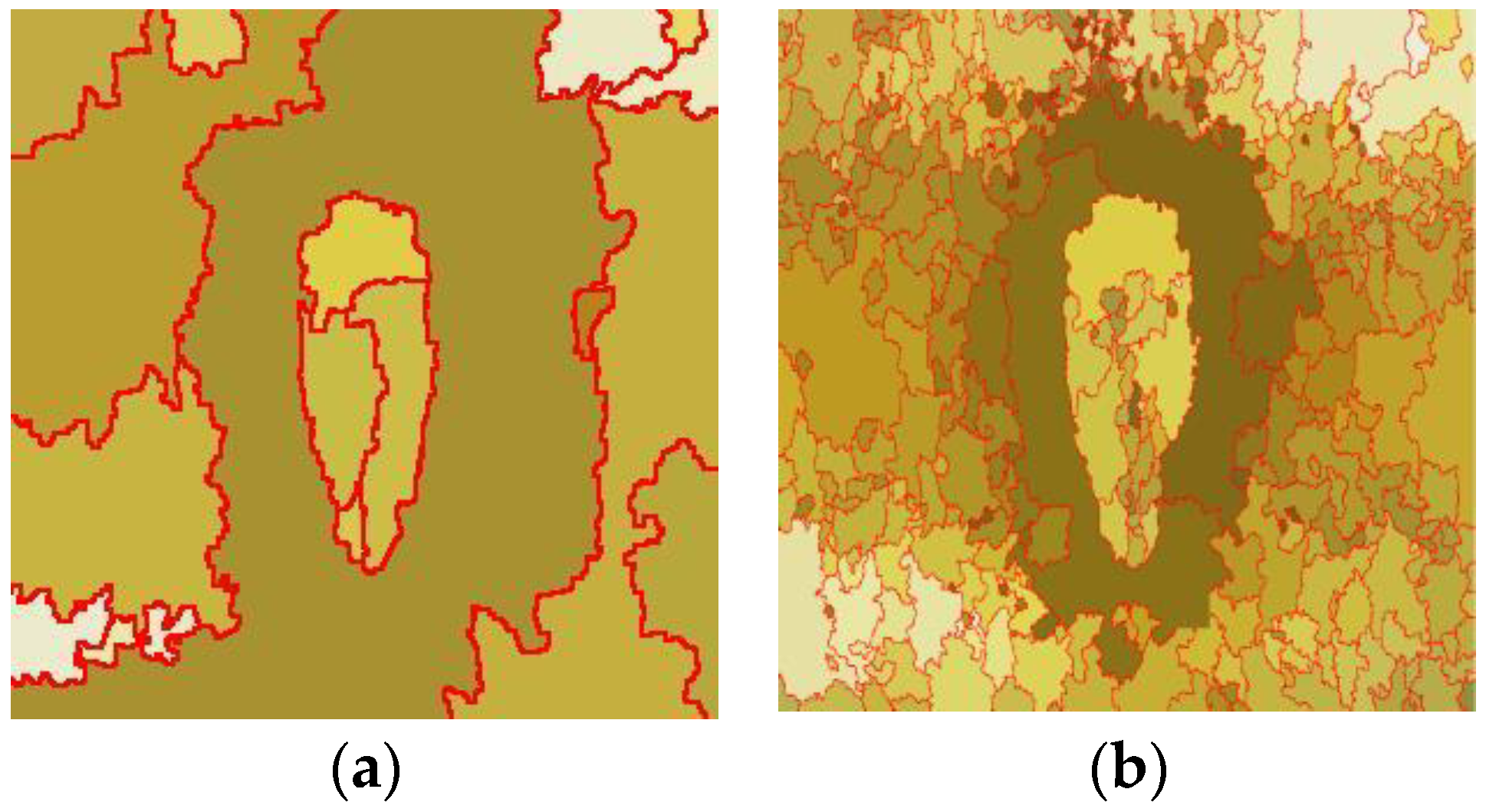
2.2.2. Entropy Rate Superpixel Segmentation
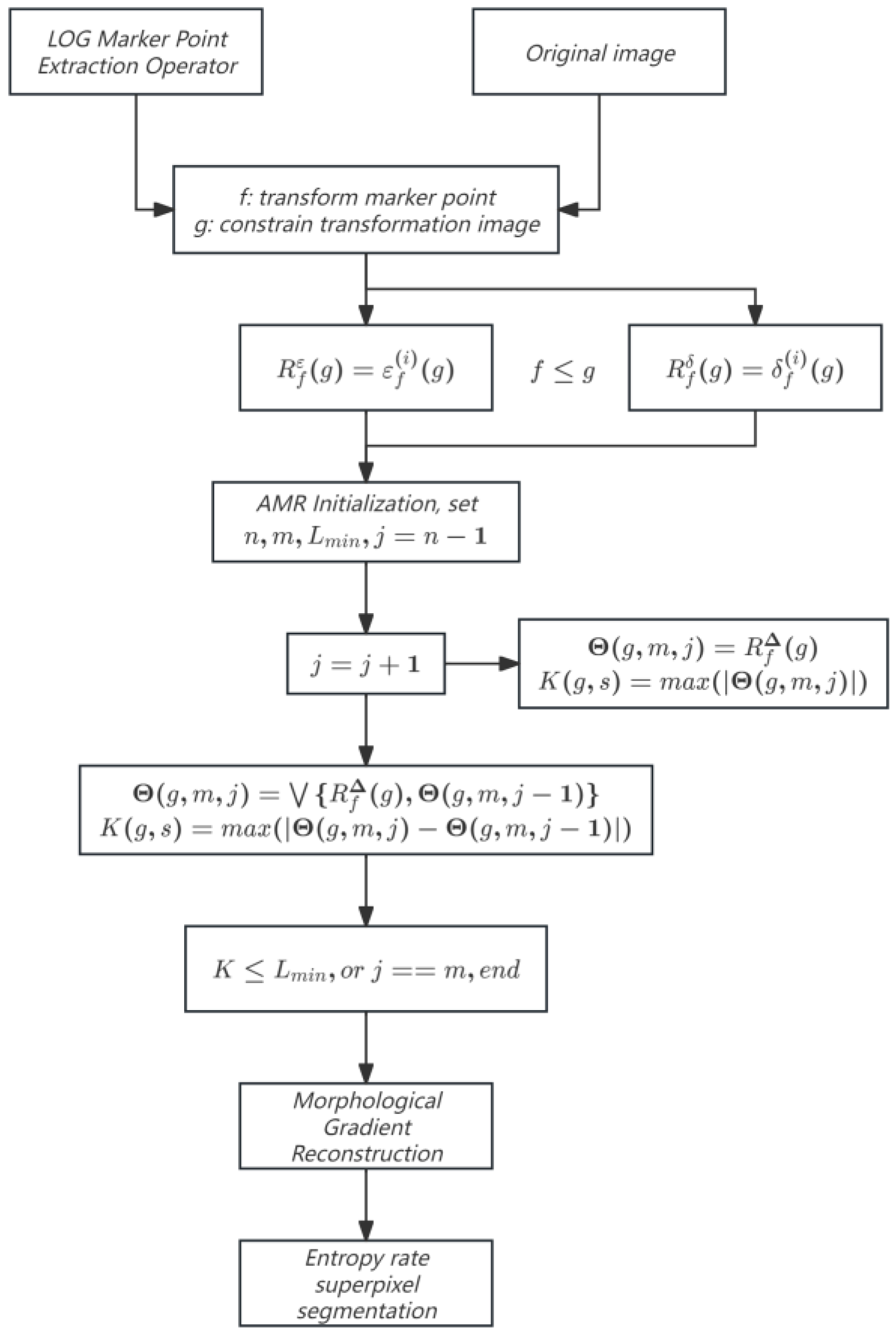
2.2.3. Morphological Adaptive Feature Extraction
- (1)
- Process the image P based on LOG, mark the contour feature points, and use the connected domain extremum point module to process;
- (2)
- Apply AMR to image P to generate the morphological gradient reconstruction ;
- (3)
- The entropy rate superpixel segmentation method divides the image P into N regions, each representing the growth range of pixel points;
- (4)
- Extract gradient features from each region, integrate all feature vectors into a feature vector matrix, initialize the membership matrix, update the clustering centers, and use Equation (10) to update the weight matrix;
- (5)
- If , proceed to step 6, otherwise return to step 4;
- (6)
- Obtain the final segmentation result based on the membership matrix.
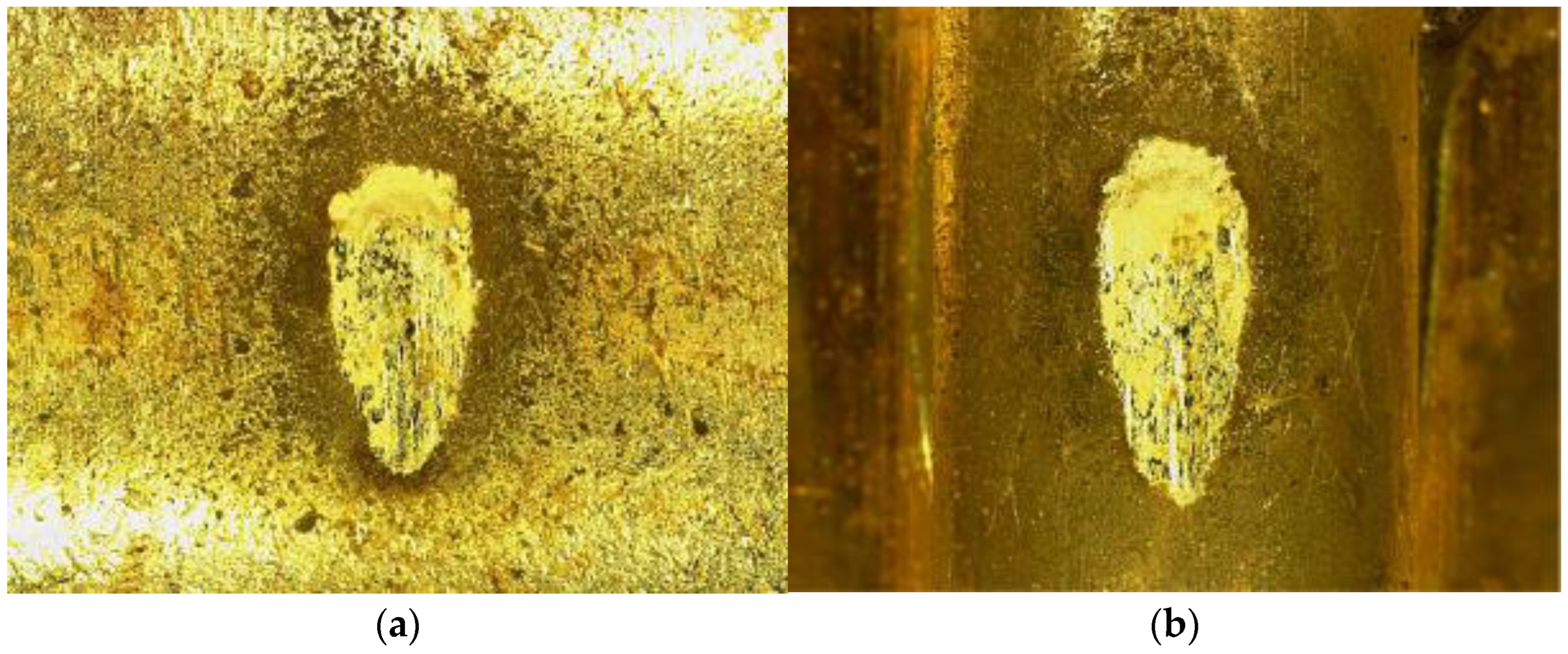
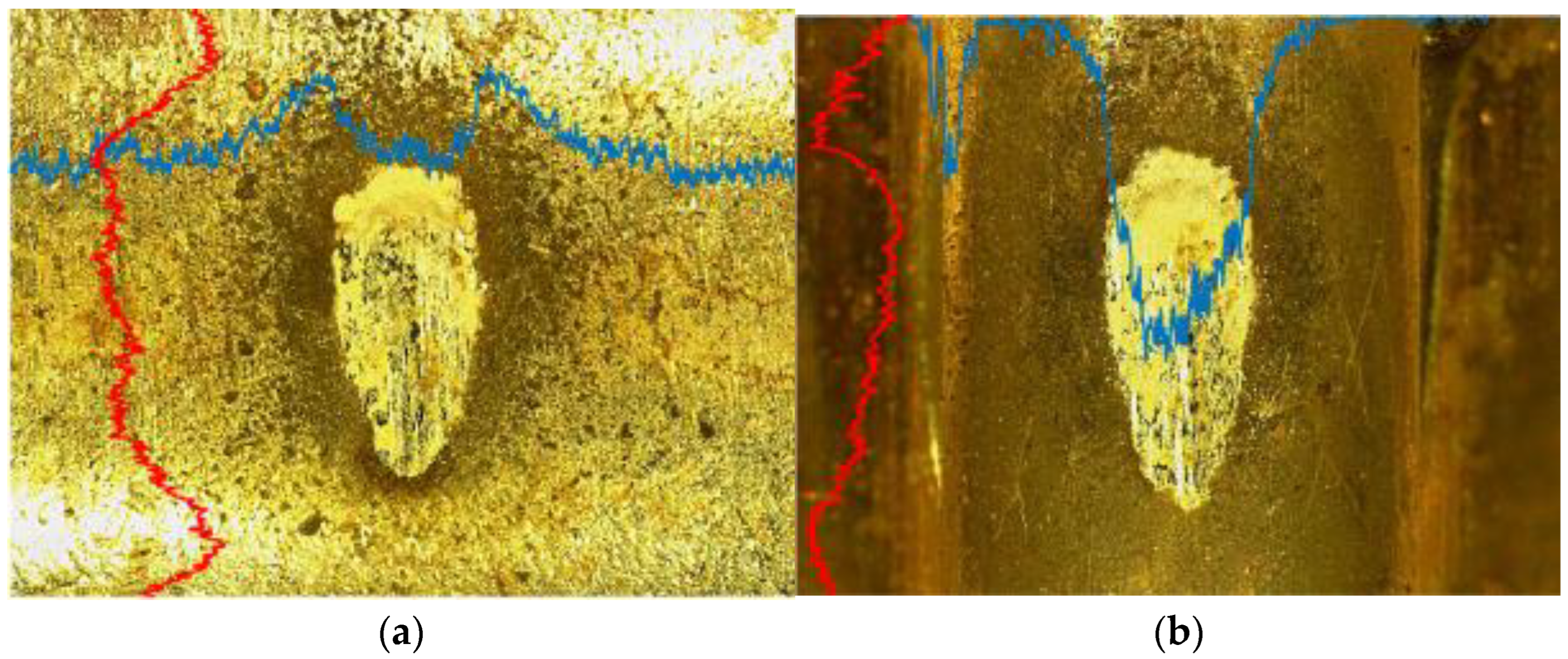
2.2.4. Contact Group Feature Matching and Difference Plane Construction
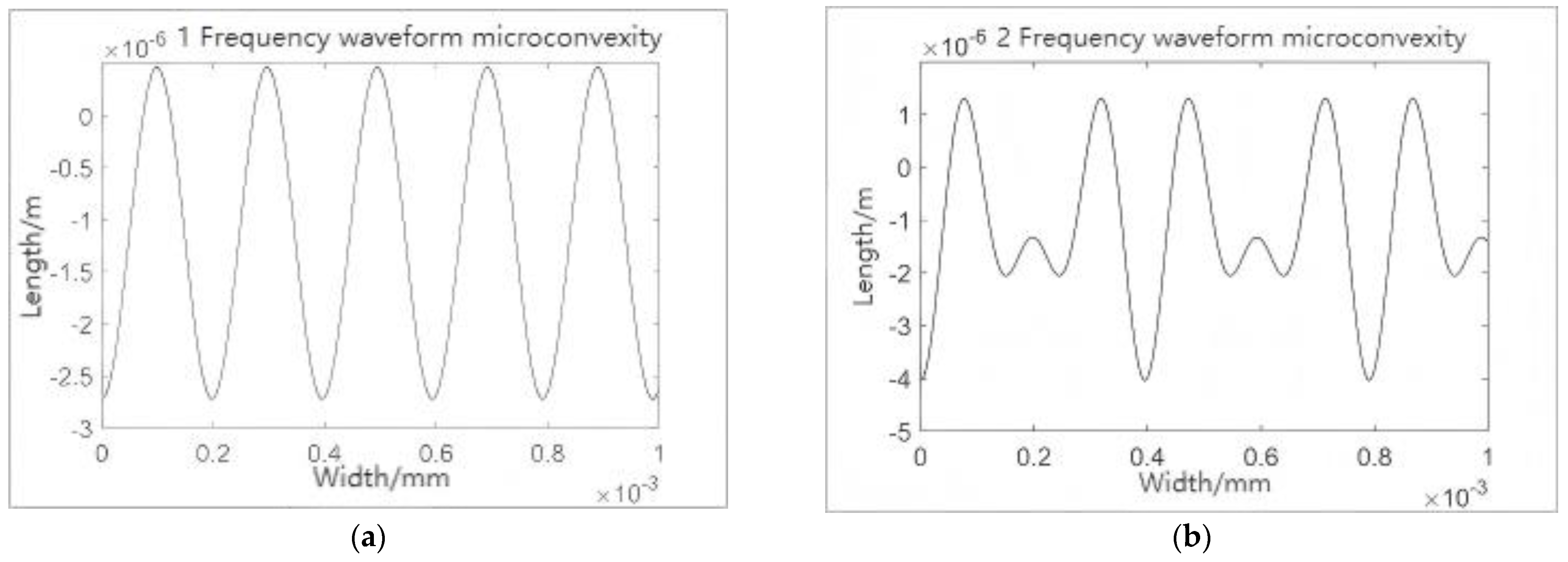
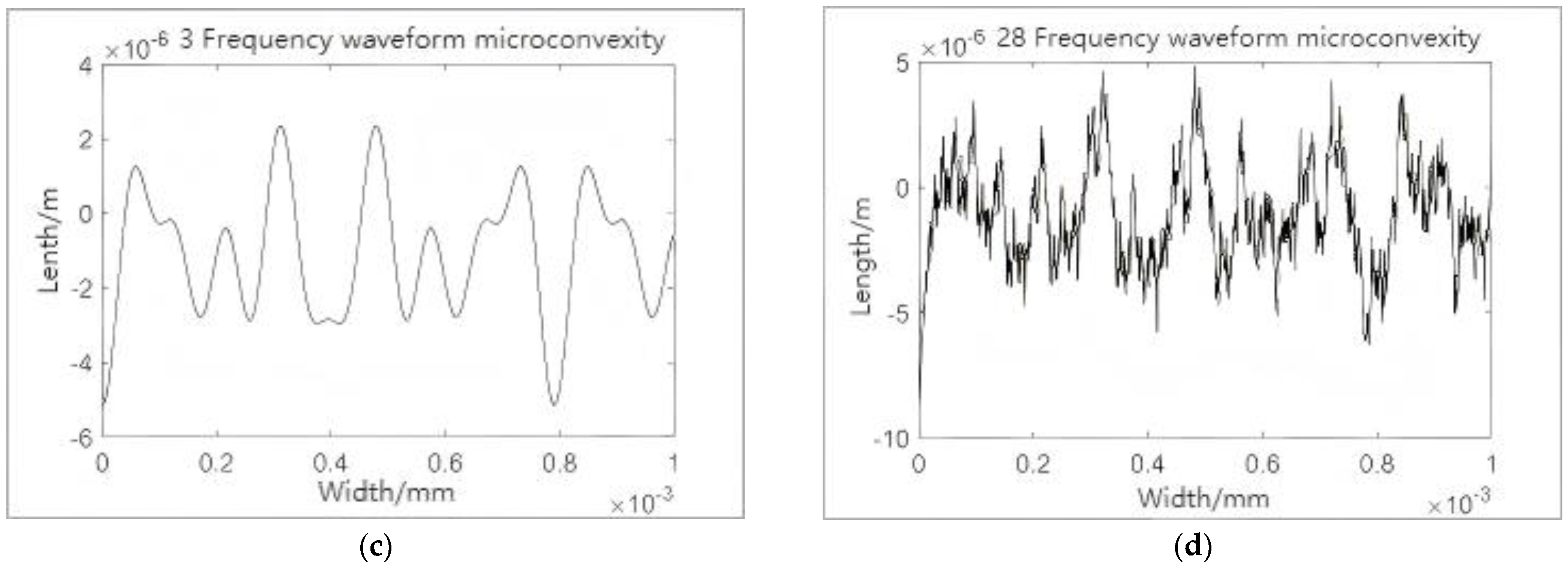
3. The Fractal Model and the W-M Contact Model
- z: the height of the combined surface profile;
- x,y: profile coordinates;
- : random phase;
- L: sampling length;
- D: fractal dimension;
- G: scale parameter;
- γ: spatial frequency of the profile;
- M: number of overlapping surface protrusions;
- n: frequency exponent, rank of micro-asperities.
3.1. Optimization of a Single Micro-Asperity Model
- H: hardness of materials;
- K: hardness coefficient, ;
- E: elastic modulus, ;
- : elastic modulus of two contacting surfaces;
- : Poisson’s ratio of two contacting surfaces.
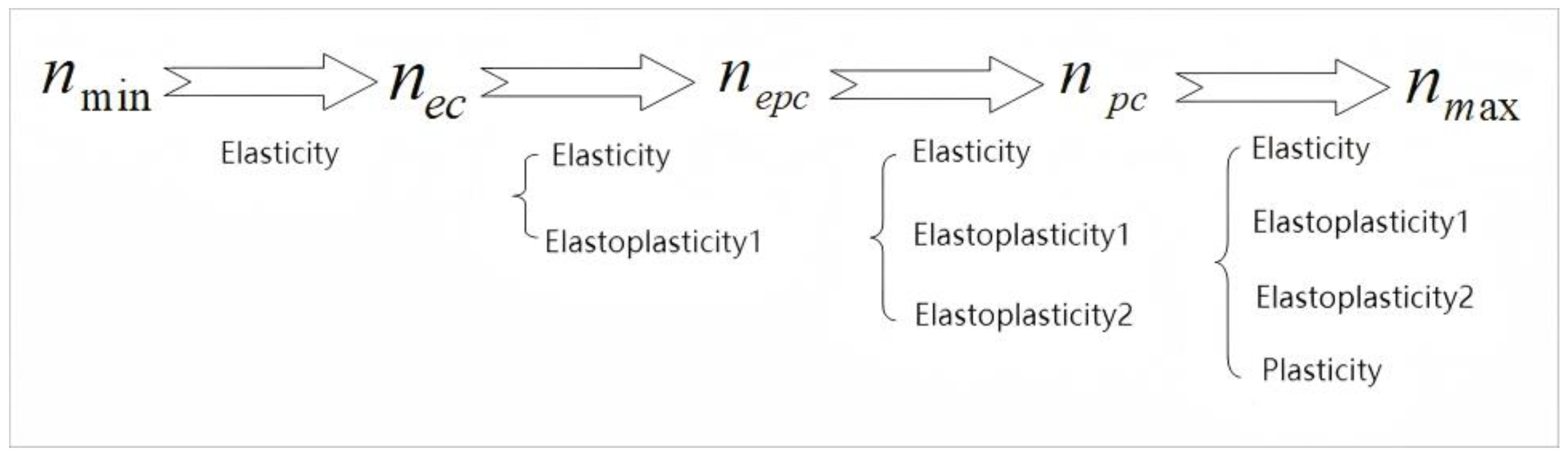
3.2. Deformation Stages of a Single Micro-Asperities
- (1)
- Elastic contact
- (2)
- Plastic contact
- (3)
- Elastoplastic contact
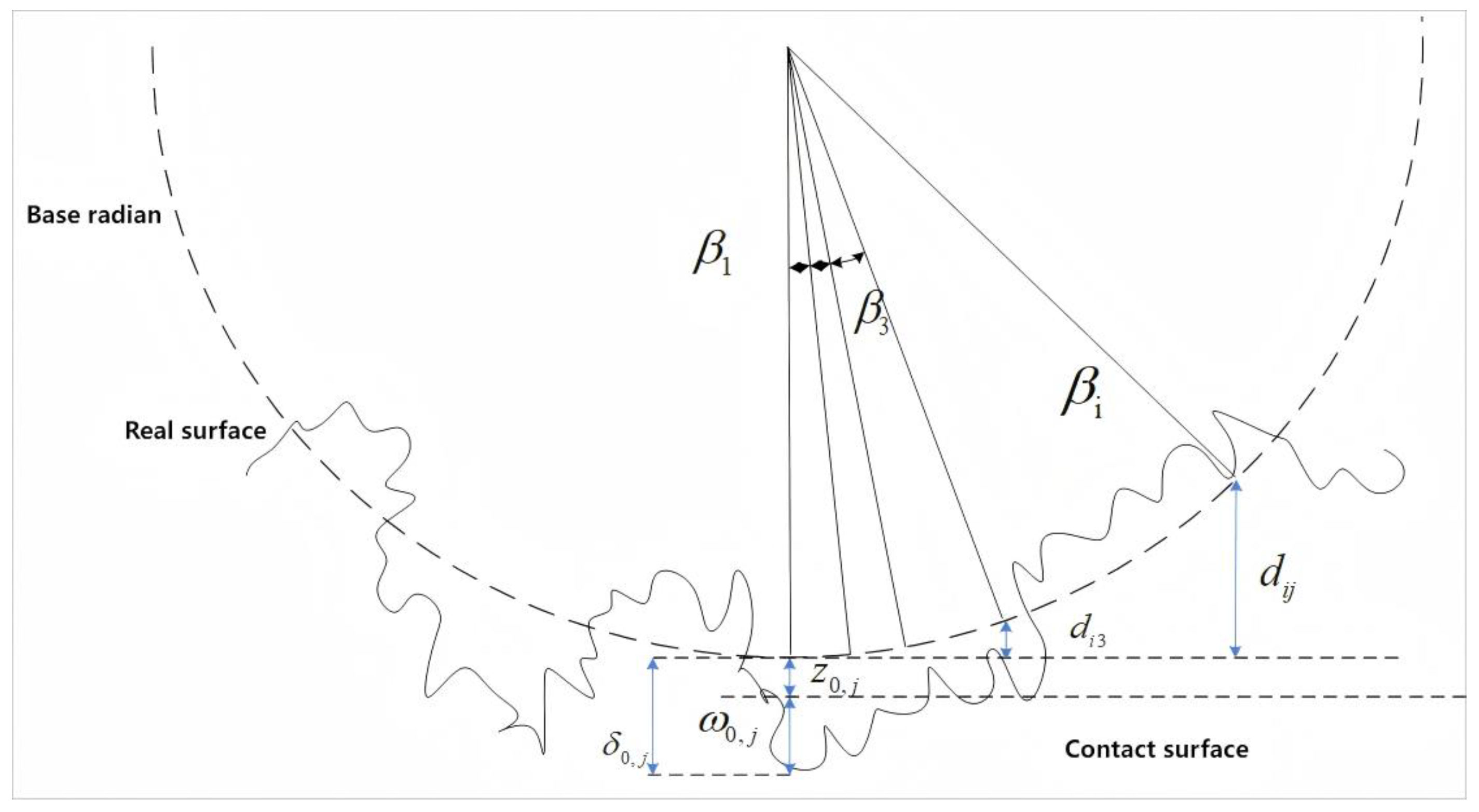
3.3. The Micro-Asperity Fractal Processing and Distribution Model
3.4. Establishment of the Distribution Model for Micro-Asperity Base Areas
4. Analysis of the Three-Dimensional Micro-Contact Model
5. Experiments
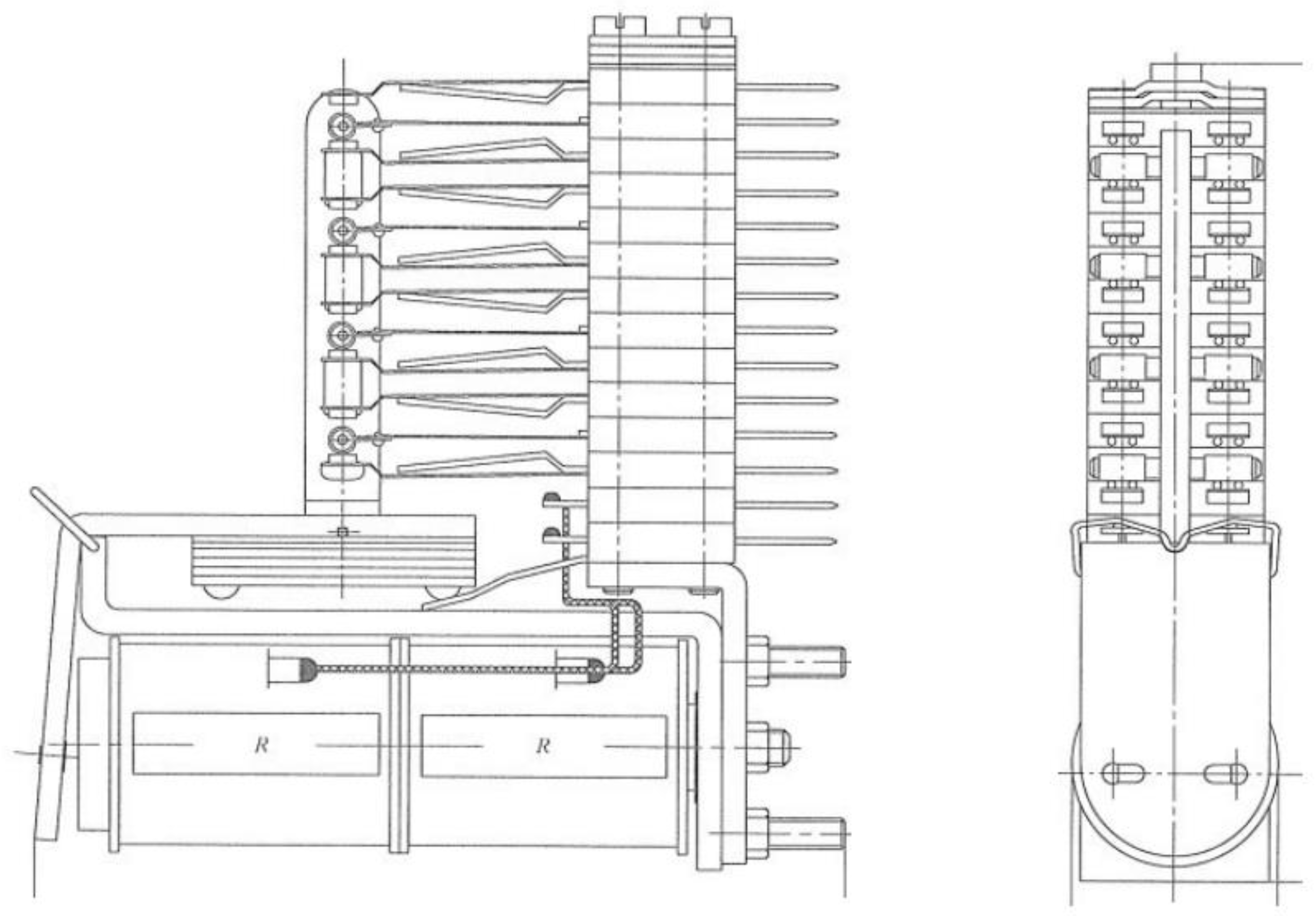
5.1. Sample Introduction
5.2. Experimental Introduction
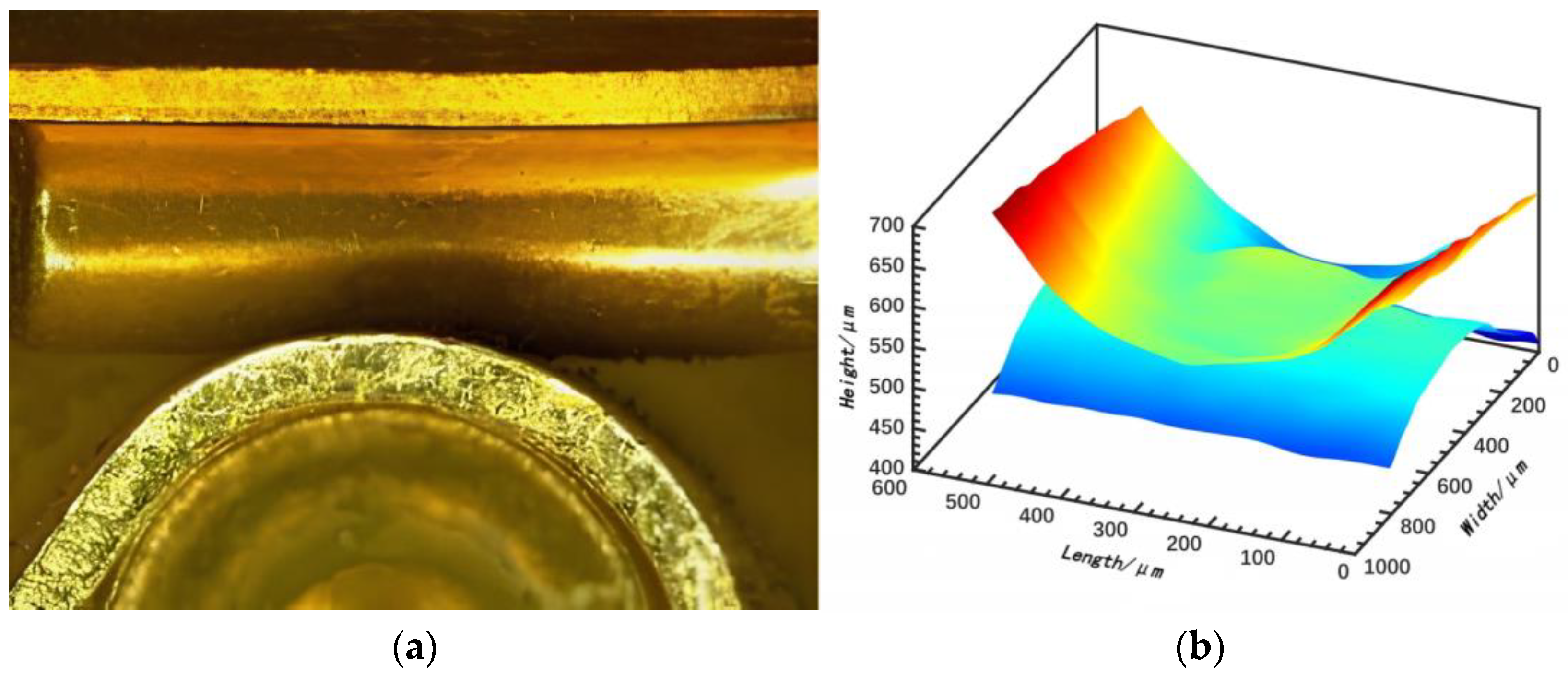
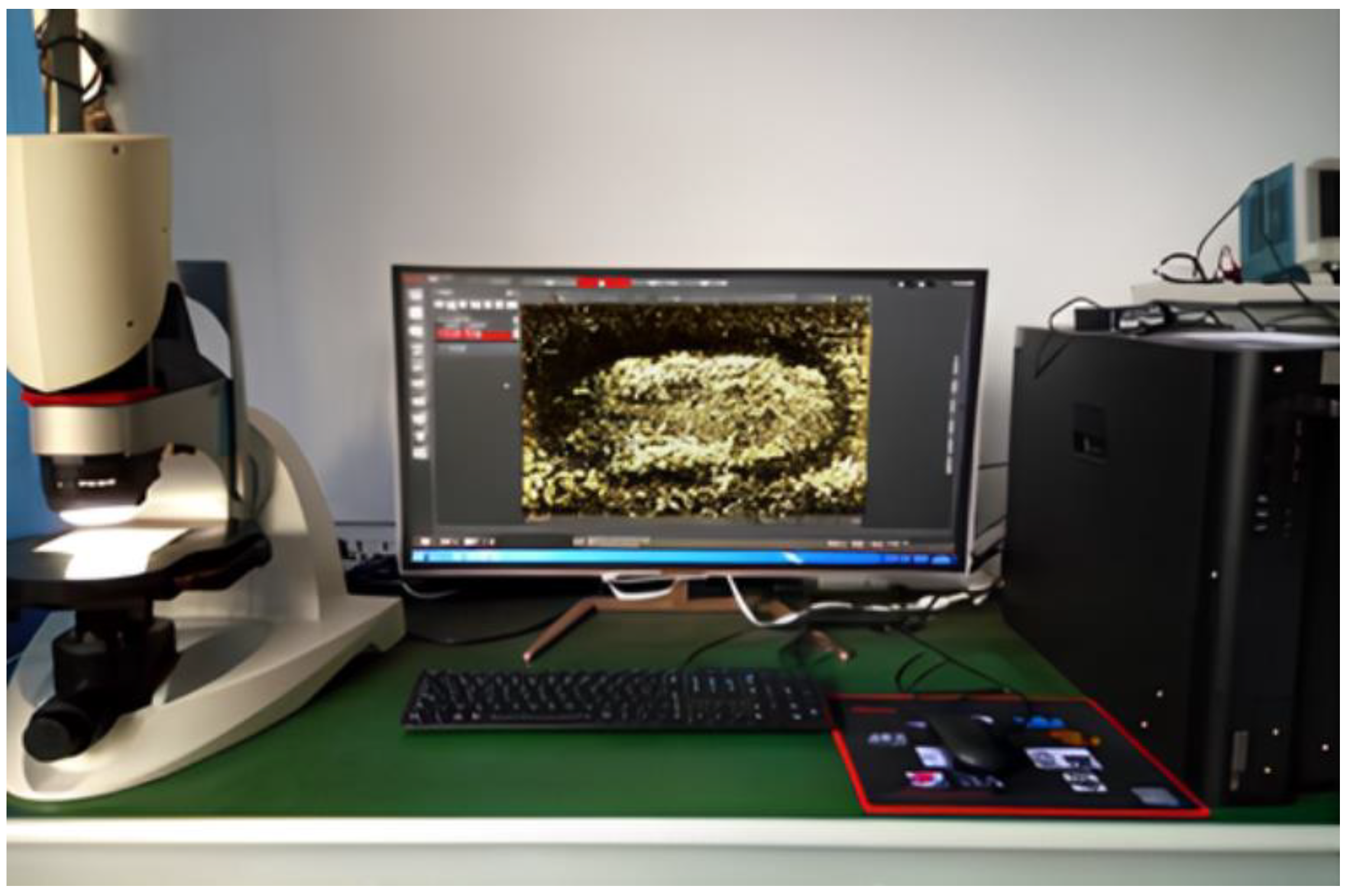
5.3. Non-Contact 3D Profilometry System Introduction
6. Discussion
7. Conclusions
- (1)
- This paper proposes a method for adaptive morphological feature extraction based on entropy rate superpixel seed points, combined with an adaptive morphological reconstruction (AMR) method using LOG features. It can adaptively filter out useless seed points while preserving meaningful seed points, achieving the extraction of surface micro-morphological features of contact groups.
- (2)
- This paper proposes a combined surface normal contact stiffness fractal model, which is compared with data from other literature models to verify its correctness. The model’s features include correcting the W-M model based on point cloud data, characterizing the distribution of micro-asperities using an island distribution function, and incorporating three contact deformation mechanisms of micro-asperities: elastic, elastoplastic, and fully plastic. It also considers the anisotropy of rough surfaces, making the model more closely aligned with the actual contact process of the contact point group.
- (3)
- This article analyzes the contact deformation process of the model, explores the properties of micro-asperity deformation, and its impact on the actual contact area, providing a theoretical basis for the correlation analysis between the surface micro-morphological characteristics of contact groups and the electrical contact performance of switching electrical appliances.
- (4)
- The content of this article requires further study. Subsequent work can integrate more morphological feature parameters and consider the effect of surface films to establish a more comprehensive and accurate contact model.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, H.T.; Liu, W.; Yang, M.L.; Zhu, Y.C. Effect of Particle Size of Second Phase on Wettability and Electrical Contact Properties of AgSnO2 Contact Materials. Rare Met. Mater. Eng. 2022, 51, 24–29. [Google Scholar]
- Li, Z.; Wang, Z.B.; Liu, B.X.; Qiao, Q.Y.; Chen, K.N. Research on failure degradation evaluation of electromagnetic relay contact material under resistive loads. Univ. Sci. Technol. 2023, 37, 66–72. [Google Scholar]
- Chen, Z.; Liu, Y.; Zhou, P. A comparative study of fractal dimension calculation methods for rough surface profiles. Chaos Solitons Fractals 2018, 112, 24–30. [Google Scholar] [CrossRef]
- Zhou, L.; Lu, T.C.; Zhang, B.; Yu, G.K.; Wan, J.W. Multi-Physics Coupling Analysis of Rough Surfaces Using 3D Fractal Model. Trans. China Electrotech. Soc. 2015, 30, 226–232. [Google Scholar]
- ISO 25178-2:2021; Geometrical Product Specifications (GPS)—Surface Texture: Areal—Part 2: Terms, Definitions and Surface Texture Parameters. International Standard Organization: London, UK, 2021.
- Ghaednia, H.; Wang, X.; Saha, S.; Xu, Y.; Sharma, A.; Jackson, R.L. A review of elastic-plastic contact mechanics. Appl. Mech. Rev. 2017, 69, 60804. [Google Scholar] [CrossRef]
- Li, Z.T.; Wang, S.J.; Han, Z.R.; Wei, J.J.; Zhao, J.J.; Li, P.Y. Modeling of Tangential Stiffness of Mechanical Joint Surface Using lmproved Fractal Theory and Continuous Deformation Theory. Xi’an Jiaotong Univ. 2020, 54, 107–114. [Google Scholar]
- Han, Z.R. Research on the Contact Characteristics of Anisotropic Joint Surface Using the Contact Coefficient of Ellipsoid. Master’s Thesis, Xi’an University of technology, Xi’an, China, 2021. [Google Scholar]
- Yuan, Y.; Cheng, Y.; Liu, K.; Gan, L. A revised Majumdar and Bushan model of elastoplastic contact between rough surfaces. Appl. Surf. Sci. 2017, 425, 1138–1157. [Google Scholar] [CrossRef]
- Stanislaw, K.; Grzegorz, S. Study of contact of rough surfaces: Modeling and experiment. Wear 2014, 311, 167–179. [Google Scholar]
- Peta, K.; Stemp, W.J.; Chen, R.; Love, G.; Brown, C.A. Multiscale characterizations of topographic measurements on lithic materials and microwear using a GelSight Max: Investigating potential archaeological applications. J. Archaeol. Sci. Rep. 2024, 57, 104637. [Google Scholar] [CrossRef]
- Chen, J.; Liu, D.; Wang, C.L.; Zhang, W.Y.; Zhu, L.B. A fractal contact model of rough surfaces considering detailed multi-scale effects. Tribol. Int. 2022, 176, 107920. [Google Scholar] [CrossRef]
- Li, L.L.; Ma, D.J.; Li, Z.G. Chaotic Predication of Dynamic Contact Resistance Times Series on Contacts. Trans. China Electrotech. Soc. 2014, 29, 187–193. [Google Scholar]
- Zhao, Z.Y. Factors Affecting Contact Resistance Change of Railway Signal Relay. Railw. Signal. Commun. Eng. 2020, 17, 13–18. [Google Scholar]
- Li, W.; Li, Q.; Zhao, Z.; Pan, R.; Lu, W. Contact Spots Analysis of Sealed Relay Contact Pair Based on Contact Difference-Plane. IEEJ Trans. Electr. Electron. Eng. 2021, 16, 355–363. [Google Scholar] [CrossRef]
- Wang, S.H.; Yuan, W.K.; Liang, X.M.; Wang, G.F. A new analytical model for the flattening of Gaussian rough surfaces. Eur. J. Mech./A Solids 2022, 94, 104578. [Google Scholar] [CrossRef]
- Chu, N.R.; Jackson, R.L.; Wang, X.Z.; Gangopadhyay, A.; Ghaednia, H. Evaluating Elastic-Plastic Wavy and Spherical Asperity-Based Statistical and Multi-Scale Rough Surface Contact Models with Deterministic Results. Materials 2021, 14, 3864. [Google Scholar] [CrossRef]
- Ta, W.; Zhao, H.; Zhang, X.Y.; Gao, Y.W.; Zhou, Y.H. Rough contact surface reconstruction based on A mechanicalthermal contact model. Tribol. Int. 2023, 177, 107977. [Google Scholar] [CrossRef]
- Ejaz, F.; Kang, M.; Son, J.; Kim, J.S.; Lee, D.S.; Kwon, B. A two-dimensional finite element model for Cu-CNT composite: The impact of interface resistances on electrical and thermal transports. Materialia 2022, 24, 101505. [Google Scholar] [CrossRef]
- Chen, W.K.; Jin, W.Y.; Cao, H. Finite element analysis of indentation contact of double piezoelectric spheres. Mater. Today Commun. 2021, 11, 102775. [Google Scholar] [CrossRef]
- Xu, S.J.; Zhou, Y.X.; Meng, Y.B.; Liu, G.H.; Shi, Y. Image segmentation based on higher-order MRF model with multi-node topological overlap measure. Acta Autom. Sin. 2020, 41, 1–16. [Google Scholar]
- Song, Y.T.; Ji, Z.X.; Sun, Q.S. Brain MR Image Segmentation Algorithm Based on Markov Random Field with Image Patch. Acta Autom. Sin. 2014, 40, 1754–1763. [Google Scholar]
- Zhang, Z.L.; Li, A.H.; Li, C.W. Superpixel Segmentation Based on Clustering by Finding Density Peaks. Chin. J. Comput. 2020, 43, 1–15. [Google Scholar]
- Li, W.H.; Zhao, P.D.; Wang, J.Q. A Three-Dimensional Roughness Characterization Method for the Morphology of the Ablation Area of Silver Wire Type Contacts. China Patent CN113344823B, 5 October 2022. [Google Scholar]
- Lideberg, T. Feature detection with automatic scale selection. Int. J. Comput. Vis. 1998, 30, 79–116. [Google Scholar] [CrossRef]
- Ciavarella, M.; Greenwood, J.A.; Paggi, M. Inclusion of “interaction” in the greenwood and williamson contact theory. Wear 2008, 265, 729–734. [Google Scholar] [CrossRef]
- Ta, W.R.; Qiu, S.M.; Wang, Y.L.; Yuan, J.Y.; Gao, Y.W.; Zhou, Y.H. Volumetric contact theory to electrical contact between random rough surfaces. Tribol. Int. 2021, 160, 107007. [Google Scholar] [CrossRef]
- Fu, S.; Cao, Y.D.; Li, J. Simulation of forming process of Vacuum Metal vapor arc in Contact Separation moment. Trans. China Electrotech. Soc. 2020, 35, 2922–2931. [Google Scholar]
- Chen, J.J. Study on the Contact Property of Rough Surface During Loading-Unloading Process. Master’s Thesis, Xi’an University of Technology, Xi’an, China, 2018. [Google Scholar]
- Wu, Q.; Xu, G.F.; Yuan, M.; Wu, C.P. Influence of operation numbers on arc erosion of Ag/CuO electrical contact material. J. Mater. Sci. Mater. Electron. 2020, 31, 2497–2513. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.Q.; Kang, H.L.; Hu, D.L. Simulation and Experiment of Metal-Doped AgSnO2 Contact Material. Trans. China Electrotech. Soc. 2021, 36, 1587–1595. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Contact Morphology | Reconstructed Morphology | |
| Unablated area (local) |  | 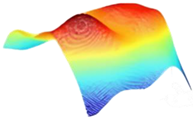 |
| Ablated area (local) |  | 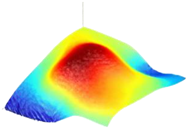 |
| Evaluation Indicators | Moving Contact | Static Contact | Mixed Data |
|---|---|---|---|
| PRI | 0.92 | 0.94 | 0.89 |
| GCE | 0.14 | 0.12 | 0.15 |
| BDE | 6.6 | 6.8 | 7.4 |
| Parameters | Value |
|---|---|
| Micro-asperity level | |
| Fractal dimension D | |
| Characteristic scale parameter G | |
| Elastic modulus E | |
| Hardness H | |
| Poisson’s ratio ν | |
| Resistivity of Ag | |
| Resistivity of AgCdO |
| Conditions | Descriptions |
|---|---|
| Test environment | Temperature: 40 °C, 49 °C, 65 °C, 90 °C Humidity: 65% |
| Test sample | A certain type of railway relay |
| Contact material | Moving contact (cathode): Ag/15CdO Stationary contact (anode): Ag |
| Electrical life | 2 million times |
| Test conditions | Coil voltage: DC24 V Contact load: DC24 V/1 A (resistive) |
| Test method | 3D non-contact analysis system |
| Test period | 40 °C: 200,000 cycles; 49 °C: 150,000 cycles; 65 °C: 100,000 cycles; 90 °C: 50,000 cycles |
| Conditions | Descriptions |
|---|---|
| Optical system | High-performance infinity axial, radial dual chromatic aberration correction optical technology |
| Illumination devices | Annular light, coaxial light, transmitted light |
| Objective turret | Zoom ratio 16:1, magnification 1 to 2350 times (including digital zoom) |
| Stage | Travel range 70 mm × 50 mm, resolution 1 μm, maximum rotation ±180°, sample weight (maximum load) up to 2 kg |
| Observation tube | Integrated digital camera device |
| Focusing method | Auto focus |
| Resolution | 3664 × 2748 pixels |
| Pixel size | Micrometer × micrometer |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, J.; Cui, D.; Li, W.; Zhao, P.; Meng, X.; Cai, J.; Han, Z.; Wang, H. Analysis of Three-Dimensional Micro-Contact Morphology of Contact Groups Based on Superpixel AMR Morphological Features and Fractal Theory. Appl. Sci. 2025, 15, 2842. https://doi.org/10.3390/app15052842
Shen J, Cui D, Li W, Zhao P, Meng X, Cai J, Han Z, Wang H. Analysis of Three-Dimensional Micro-Contact Morphology of Contact Groups Based on Superpixel AMR Morphological Features and Fractal Theory. Applied Sciences. 2025; 15(5):2842. https://doi.org/10.3390/app15052842
Chicago/Turabian StyleShen, Jiahang, Defeng Cui, Wenhua Li, Peidong Zhao, Xianchun Meng, Jiyuan Cai, Zheng Han, and Haitao Wang. 2025. "Analysis of Three-Dimensional Micro-Contact Morphology of Contact Groups Based on Superpixel AMR Morphological Features and Fractal Theory" Applied Sciences 15, no. 5: 2842. https://doi.org/10.3390/app15052842
APA StyleShen, J., Cui, D., Li, W., Zhao, P., Meng, X., Cai, J., Han, Z., & Wang, H. (2025). Analysis of Three-Dimensional Micro-Contact Morphology of Contact Groups Based on Superpixel AMR Morphological Features and Fractal Theory. Applied Sciences, 15(5), 2842. https://doi.org/10.3390/app15052842