Optimization of Cellular Automata Model for Moving Bottlenecks in Urban Roads


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. A Cellular Automaton Model for Urban Roads Considering Vehicle Heterogeneity
2.1. Road Network Model
2.2. Vehicle Update Rules for Road Segments
2.2.1. Safe Distance Model
- Assuming at time , the distance between the leading vehicle and the following vehicle is , the following vehicle updates its position with a speed of . At the same moment, due to a sudden situation, the leading vehicle initiates emergency braking with a deceleration of and updates its position based on its speed until it comes to a complete stop. To avoid a rear-end collision, the following vehicle also initiates emergency braking and decelerates until it comes to a complete stop. Assuming that the leading vehicle comes to a stop at time , the following vehicle comes to a stop at time (generally ), and during the process of emergency braking until both vehicles come to a complete stop, they just barely avoid a collision. Based on the above analysis, the distance between the two vehicles at time represents the critical safety distance for the following vehicle to decelerate safely. This critical safety distance can be calculated.
- 2.
- The calculation process for the safe distance when a car maintains its speed is similar to that for the safe distance when a car accelerates. The difference lies in that, at time , the position of the car behind is updated based on its current speed . By analogy to the calculation process of , we can derive the expression for as follows:
- 3.
- Similarly, the calculation process for the safe distance when a car decelerates is analogous to that for the safe distance when a car accelerates and the safe distance when a car maintains its speed. The difference lies in that, at time , the position of the following car is updated based on its speed . By analogy to the calculation processes of and , we can derive the expression for as follows:
2.2.2. Car-Following Rule
- 1.
- Acceleration:
- 2.
- Deceleration:
- 3.
- Random Slowdown:
- 4.
- Location Update.
2.2.3. Lane-Changing Rules
- Rational Lane-Changing Rules: When the target vehicle cannot travel at its maximum speed in the current lane and cannot accelerate and there is sufficient distance in the target lane for acceleration without affecting the following vehicle in that lane, then a rational lane change is performed.
- 2.
- Forced Lane-Changing Rules: When the target vehicle cannot travel at its maximum speed in the current lane and cannot accelerate, but there is sufficient distance in the target lane for acceleration, which may cause the following vehicle in that lane to decelerate but not to perform emergency braking, then a forced lane change is performed.
2.3. Rules for Updating Vehicles at Intersections
3. Simulation Setup and Result Analysis
3.1. Setting of Cellular Parameters
3.2. Analysis of the Impact of Heavy-Duty Vehicles on Traffic Flow
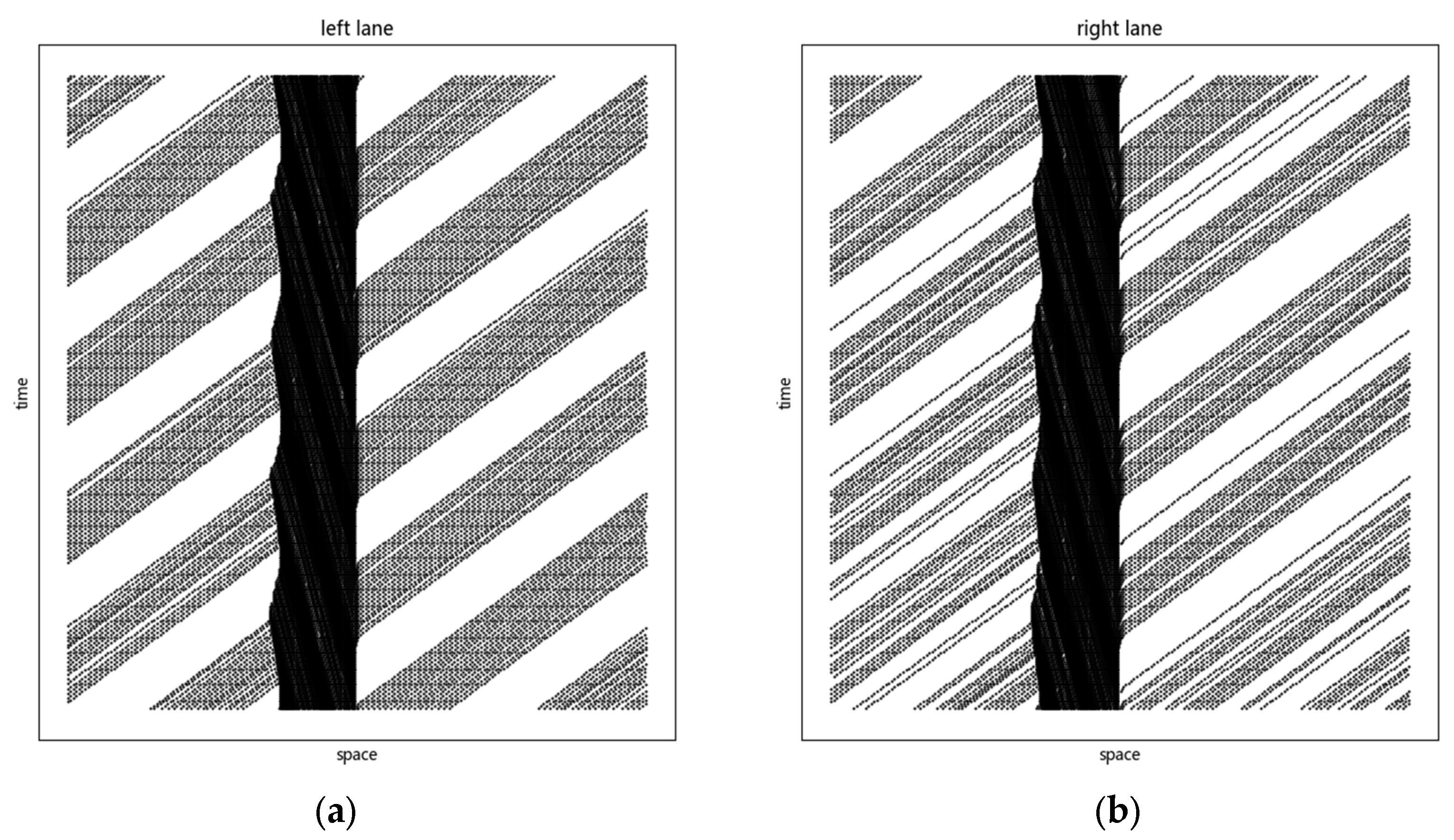
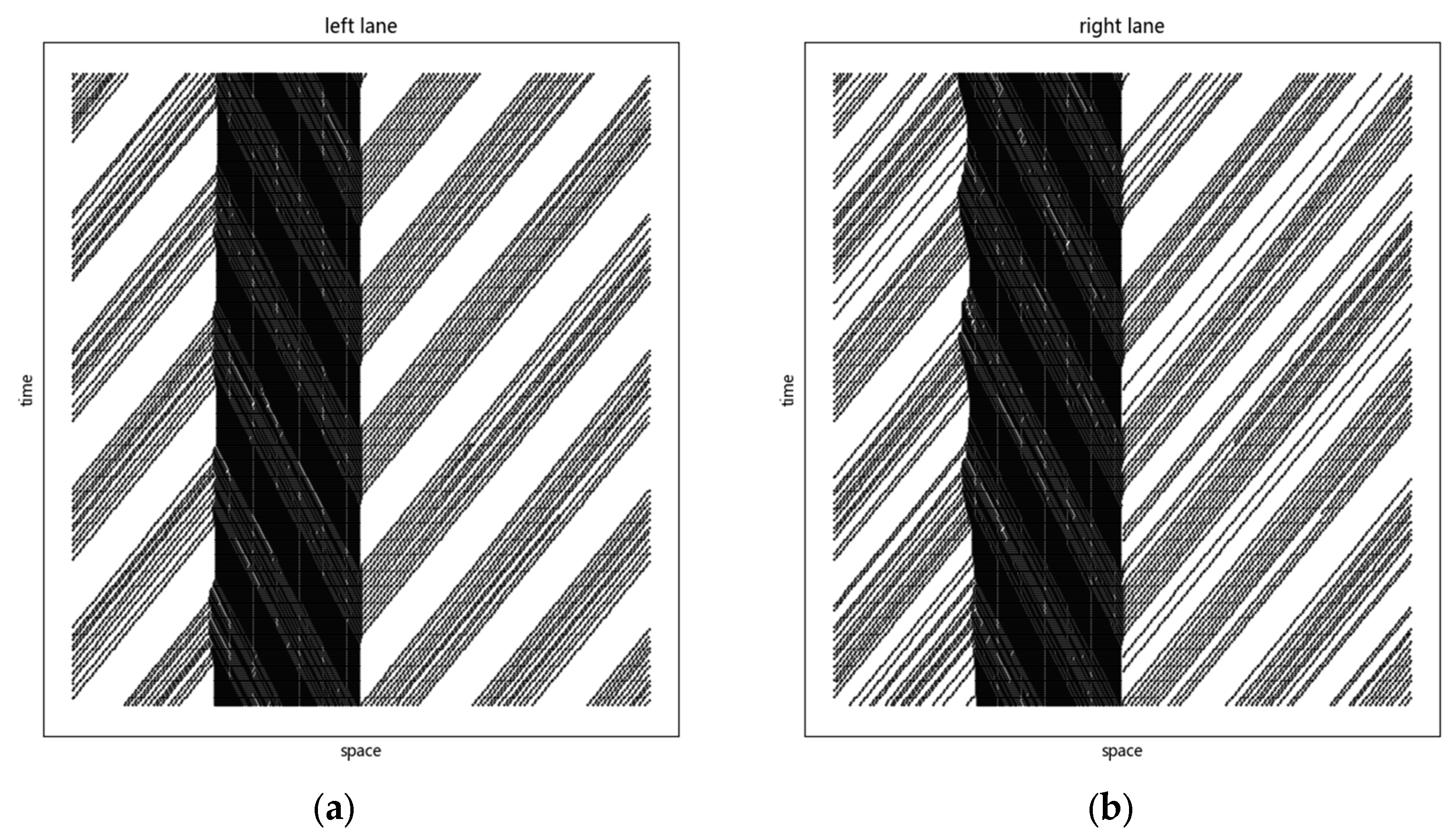
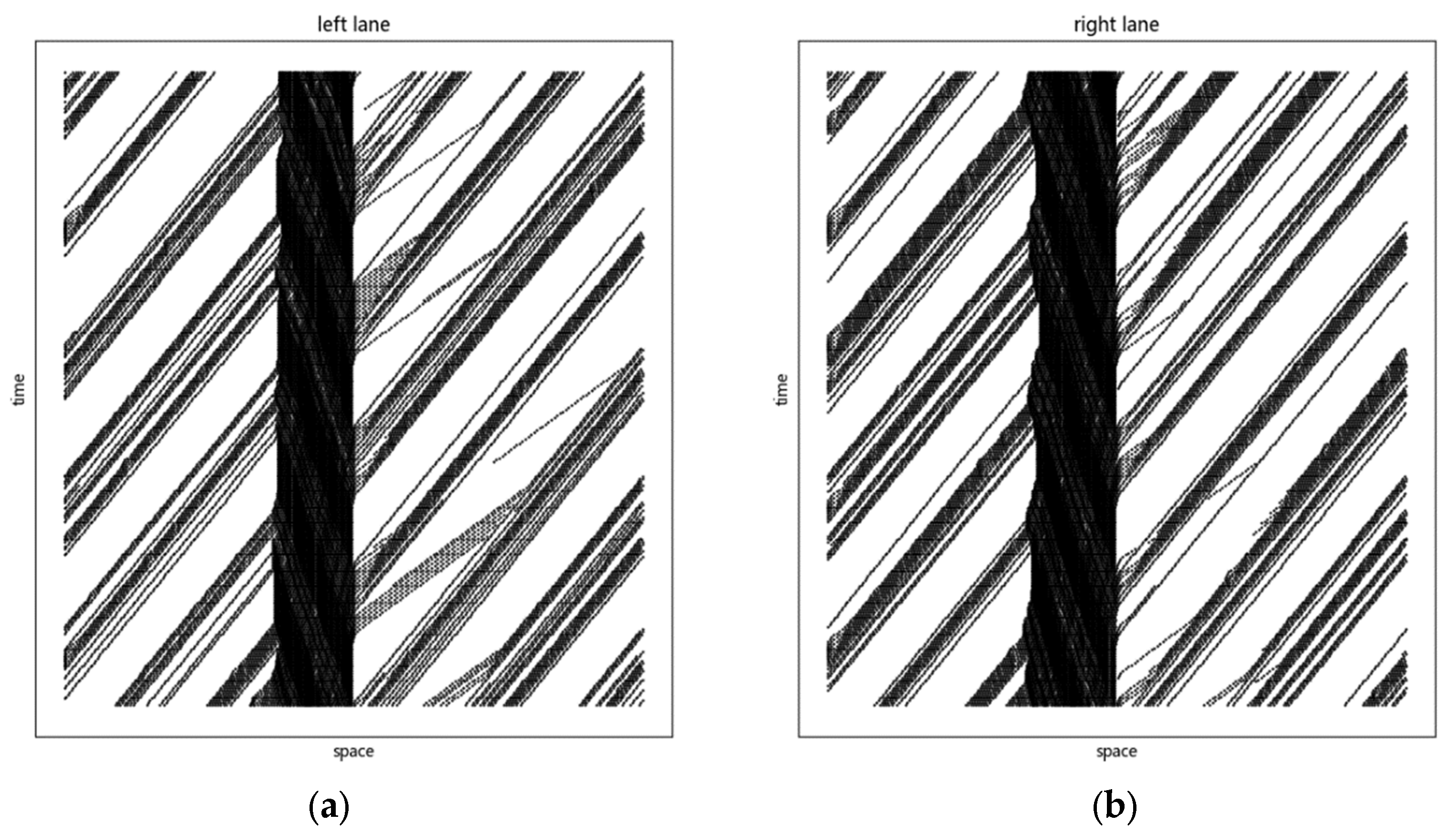
3.2.1. Analysis of Spatial-Temporal Operation Diagrams
3.2.2. The Impact of the Proportion of Heavy-Duty Vehicles on Traffic Flow
3.2.3. Impact of the Proportion of Heavy-Duty Vehicles on Vehicle Speed
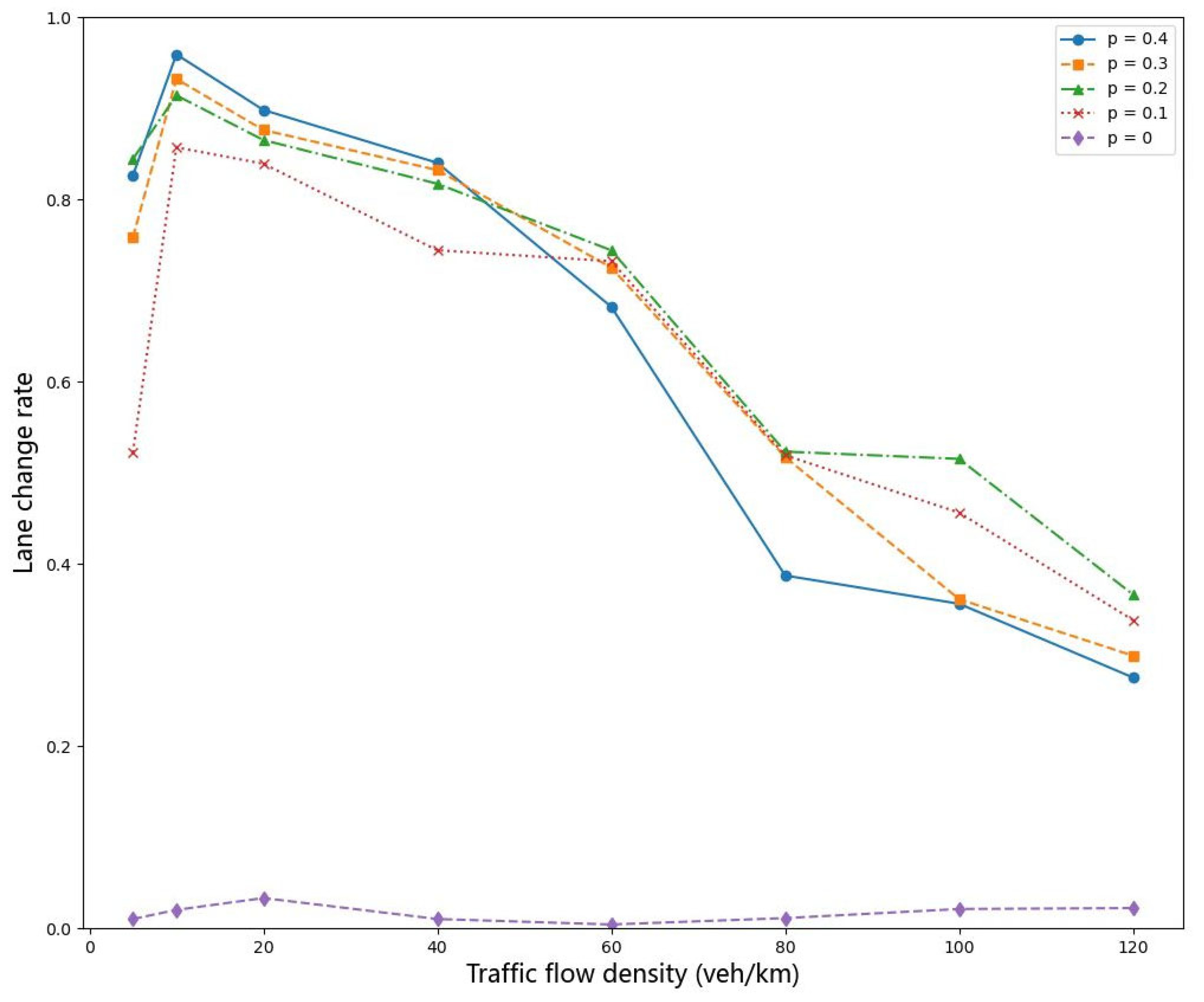
3.2.4. Impact of Heavy-Duty Vehicle Proportion on Lane-Changing Rate
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| S | safety |
| F | following |
| L | leading |
| B | braking |
| R | reaction |
| U | up |
| C | constant |
| A | acceleration |
| K | keeping |
| D | deceleration |
| the maximum speed | |
| the acceleration | |
| the emergency braking acceleration | |
| the distance between the nth vehicle and the vehicle ahead of it | |
| the distance between the nth vehicle and the intersection ahead | |
| the braking distance traveled by the following vehicle | |
| the braking distance traveled by the leading vehicle | |
| the safe driving distance | |
| the braking distance traveled by the trailing vehicle during the driver’s reaction time | |
| the braking distance traveled by the trailing vehicle during the brake coordination time of the vehicle | |
| the braking distance traveled by the trailing vehicle during the brake force increase time | |
| the distance between the nth vehicle and the vehicle ahead of it after changing to the adjacent lane | |
| the distance between the nth vehicle and the vehicle behind it after changing to the adjacent lane | |
| safety distance for accelerating vehicles | |
| safety distance for maintaining speed vehicles | |
| safety distance for decelerating vehicles |
References
- Gazis, D.C.; Herman, R. The moving and ‘phantom’ bottleneck. Transp. Sci. 1992, 26, 223–229. [Google Scholar] [CrossRef]
- Newell, G.F. A moving bottleneck. Transp. Res. Part B 1998, 32, 53l–537. [Google Scholar] [CrossRef]
- Lebacque, J.P.; Lesort, J.B.; Giorgi, F. Introducing buses in first order traffic flow models. Transp. Res. Rec. 1998, 1644, 70–79. [Google Scholar] [CrossRef]
- Yang, X.F.; Fu, Q. Research Progress in Moving Bottleneck Theory. Comput. Eng. Appl. 2011, 47, 1–3. [Google Scholar] [CrossRef]
- Piacentini, G.; Goatin, P.; Ferrara, A. Traffic control via moving bottleneck of coordinated vehicles. IFAC Pap. OnLine 2018, 51, 13–18. [Google Scholar] [CrossRef]
- Xu, J.M.; Yang, Z.B.; Ma, Y.Y. Research on Expressway Traffic Flow Control Model for Moving Bottlenecks. J. Guangxi Norm. Univ. Nat. Sci. Ed. 2020, 38, 10. [Google Scholar] [CrossRef]
- Li, Z.; Levin, M.W.; Stem, R.; Que, X. A network traffic model with controlled autonomous vehicles acting as moving bottlenecks. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020. [Google Scholar] [CrossRef]
- Li, Q.F. Research on Traffic Flow Problems Based on Multi-lane Moving Bottlenecks. Master’s Thesis, Lanzhou Jiaotong University, Lanzhou, China, 2021. [Google Scholar] [CrossRef]
- Hu, X.; Lin, C.; Hao, X.; Lu, R.; Liu, T. Influence of tidal lane on traffic breakdown and spatiotemporal congested patterns at moving bottleneck in the framework of Kerner’s three-phase traffic theory. Phys. A Stat. Mech. Its Appl. 2021, 584, 126335. [Google Scholar] [CrossRef]
- Goatin, P.; Daini, C.; Monache, M.D.; Ferrara, A. Interacting moving bottlenecks in traffic flow. Netw. Heterog. Media 2023, 18, 930–945. [Google Scholar] [CrossRef]
- Laarej, A.; Lakouari, N.; Karakhi, A.; Ez-Zahraouy, H. Analyzing the effect of fixed and moving bottlenecks on traffic flow and car accidents in a two-lane cellular automation model. J. Appl. Eng. Sci. 2023, 21, 1158, 1179–1191. [Google Scholar] [CrossRef]
- Liu, H.Q.; Jiang, R. Efficient control of connected and automated vehicles on a two-lane highway with a moving bottleneck. Chin. Phys. B 2023, 32, 054501. [Google Scholar] [CrossRef]
- Li, X.; Xiao, Y.; Jia, B. Modeling mechanical restriction differences between car and heavy truck in two-lane cellular automata traffic flow model. Phys. A Stat. Mech. Its Appl. 2016, 451, 49–62. [Google Scholar] [CrossRef]
- Wang, K. Research on Moving Bottlenecks of Heavy-Duty Trucks on Expressways Based on Cellular Automata. Master’s Thesis, Huazhong University of Science and Technology, Wuhan, China, 2017. [Google Scholar] [CrossRef]
- Pan, W.; Chen, X.; Duan, X. Energy dissipation and particulate emission at traffic bottleneck based on NaSch model. Eur. Phys. J. B Condens. Matter 2022, 95, 105. [Google Scholar] [CrossRef]
- Shang, X. Lane-changing behavior modeling and traffic flow characteristics analysis based on cellular automaton. PhD Thesis, Beijing Jiaotong University, Beijing, China, 2023. [Google Scholar] [CrossRef]
- Gong, B.; Wang, F.; Lin, C.; Wu, D. Modeling HDV and CAV Mixed Traffic Flow on a Foggy Two-Lane Highway with Cellular Automata and Game Theory Model. Sustainability 2022, 14, 5899. [Google Scholar] [CrossRef]
- Gui, S.R.; Lan, T.F.; Chen, S.S.; Ge, S.Q. Research on a Traffic Flow Model Considering Vehicle Heterogeneity in Congested Conditions. Complex Syst. Complex. Sci. 2023, 20, 98–104. [Google Scholar] [CrossRef]
- Masaka, J.; Sueyoshi, F.; Hossain, M.A.; Utsumi, S.; Tanimoto, J. Can the introduction of CAVs mitigate social dilemmas causing traffic jams on highways? Phys. Open 2023, 17, 100176. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, T.; Wang, Y.; Li, H. A cellular automaton model for mixed traffic flow considering the size of CAV platoon. Phys. A Stat. Mech. Appl. 2024, 643, 129822. [Google Scholar] [CrossRef]
- Li, S.; Yanagisawa, D.; Nishinari, K. A jam-absorption driving system for reducing multiple moving jams by estimating moving jam propagation. Transp. Res. Part C Emerg. Technol. 2024, 158, 104394.1–104394.25. [Google Scholar] [CrossRef]
- Wang, X.; Zeng, J.; Qian, Y.; Wei, X.; Zhang, F. Heterogeneous traffic flow of expressway with Level 2 autonomous vehicles considering moving bottlenecks. Phys. A Stat. Mech. Appl. 2024, 650, 129991. [Google Scholar] [CrossRef]
- Li, S.L.; Zhang, X.D.; Shi, J.Q.; Zhang, L. Modeling and Capacity Analysis of Traffic Flow at Signal-Controlled Intersections. J. Highw. Transp. Res. Dev. 2017, 34, 7. [Google Scholar] [CrossRef]
- Ez-Zahar, A.; Lakouari, N.; Oubram, O.; Marzoug, R.; Ez-Zahraouy, H. Analyzing single-lane roundabout traffic and environmental impacts through cellular automaton: A focus on U-turn effects. Int. J. Mod. Phys. C Comput. Phys. Phys. Comput. 2024, 35, 2450114. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiu, W.; Luo, S.; Li, K.; Zhao, Q.; Wang, L. Optimization of Cellular Automata Model for Moving Bottlenecks in Urban Roads. Appl. Sci. 2025, 15, 3547. https://doi.org/10.3390/app15073547
Xiu W, Luo S, Li K, Zhao Q, Wang L. Optimization of Cellular Automata Model for Moving Bottlenecks in Urban Roads. Applied Sciences. 2025; 15(7):3547. https://doi.org/10.3390/app15073547
Chicago/Turabian StyleXiu, Weijie, Shijie Luo, Kailong Li, Qi Zhao, and Li Wang. 2025. "Optimization of Cellular Automata Model for Moving Bottlenecks in Urban Roads" Applied Sciences 15, no. 7: 3547. https://doi.org/10.3390/app15073547
APA StyleXiu, W., Luo, S., Li, K., Zhao, Q., & Wang, L. (2025). Optimization of Cellular Automata Model for Moving Bottlenecks in Urban Roads. Applied Sciences, 15(7), 3547. https://doi.org/10.3390/app15073547