


The Evolution and Development Trends of LNG Loading and Unloading Arms

Abstract
1. Introduction
2. Development of Marine LNG Loading and Unloading Arms
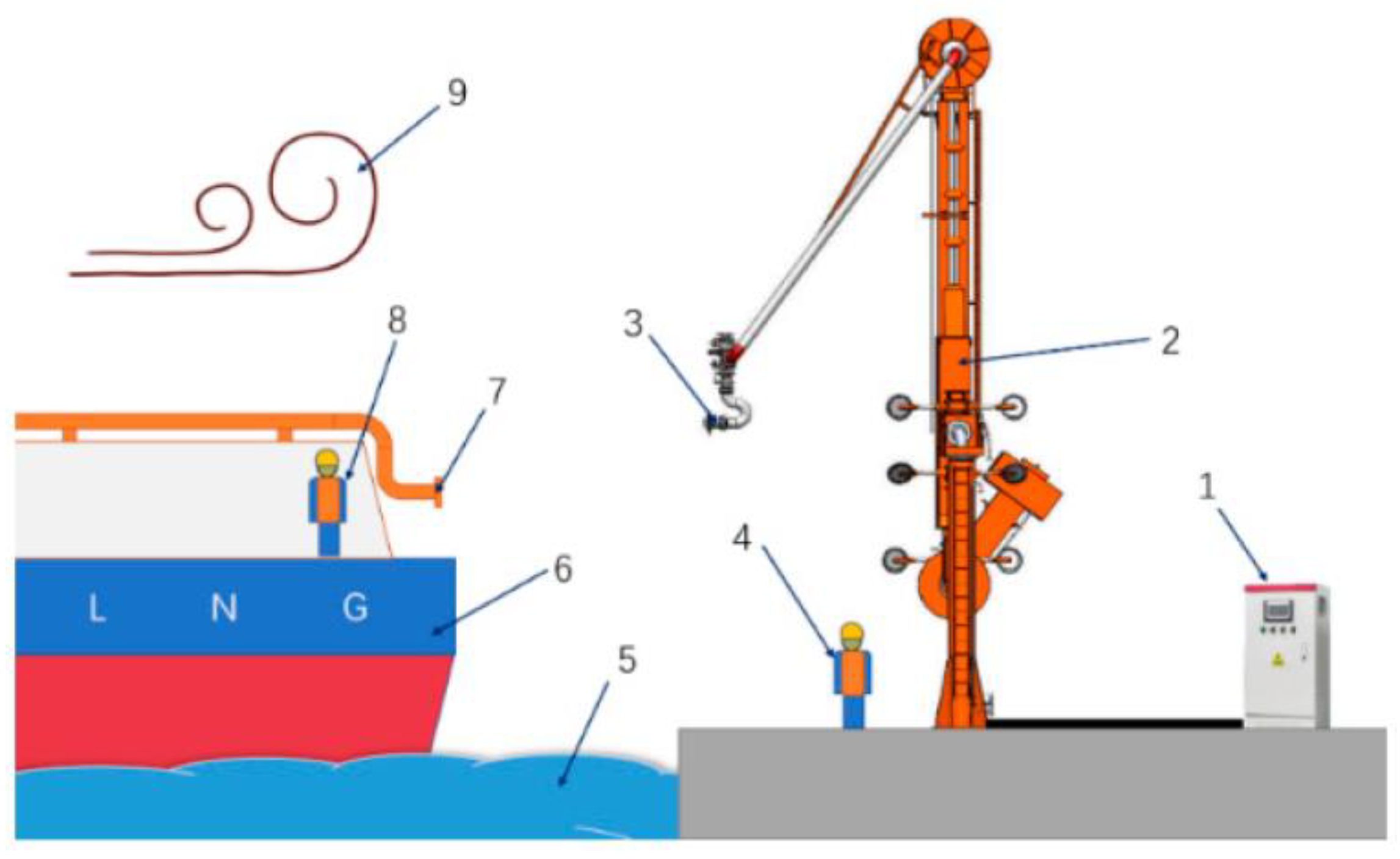
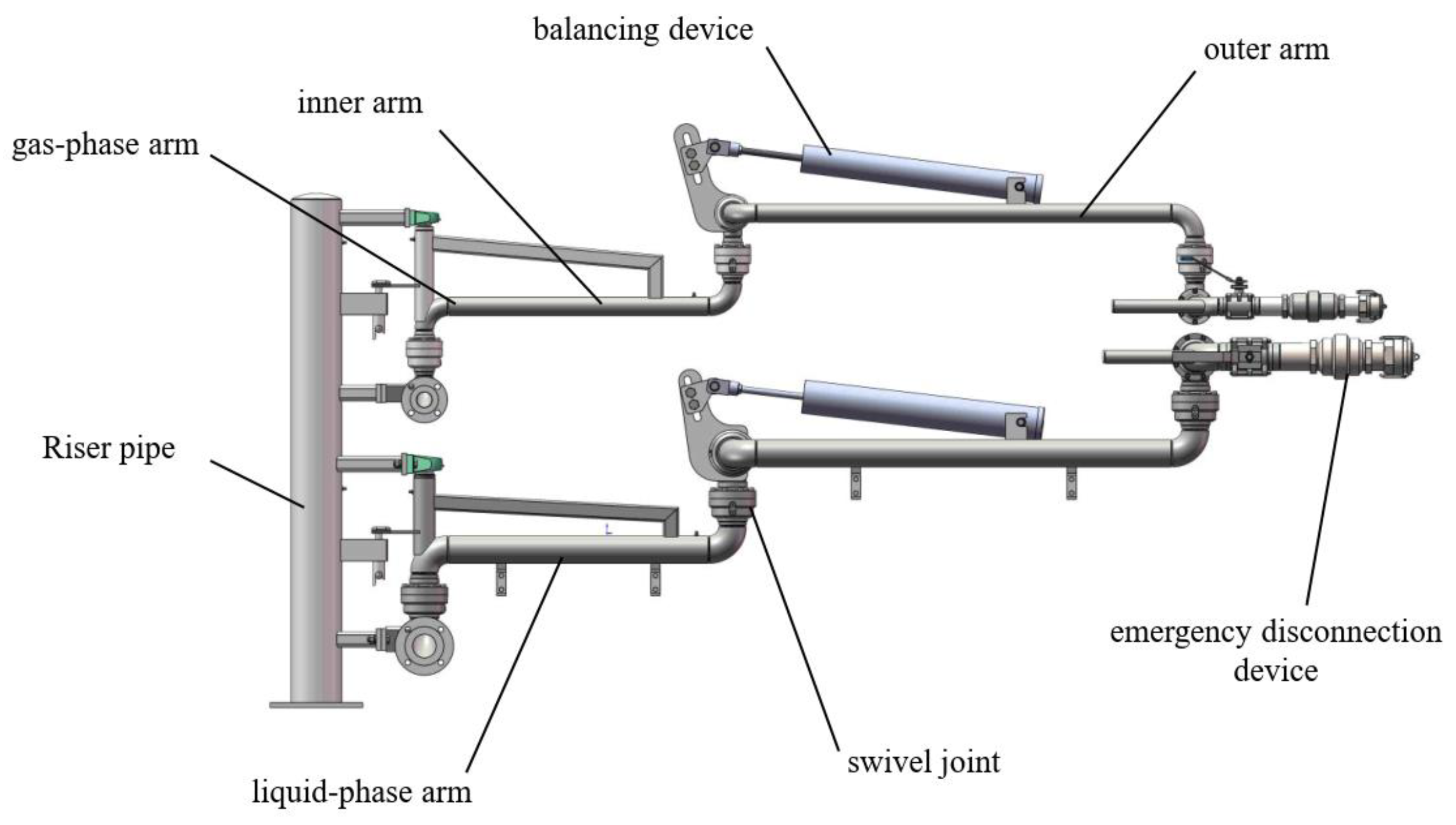
2.1. Overall Structure of the Marine Loading Arm
2.1.1. Rotary Joints and Sealing of the Marine Loading Arm
2.1.2. Emergency Disconnection System
2.2. Marine Loading Arm Actuation and Its Intelligence and Automation
3. Development of Land-Used LNG Loading and Unloading Arms
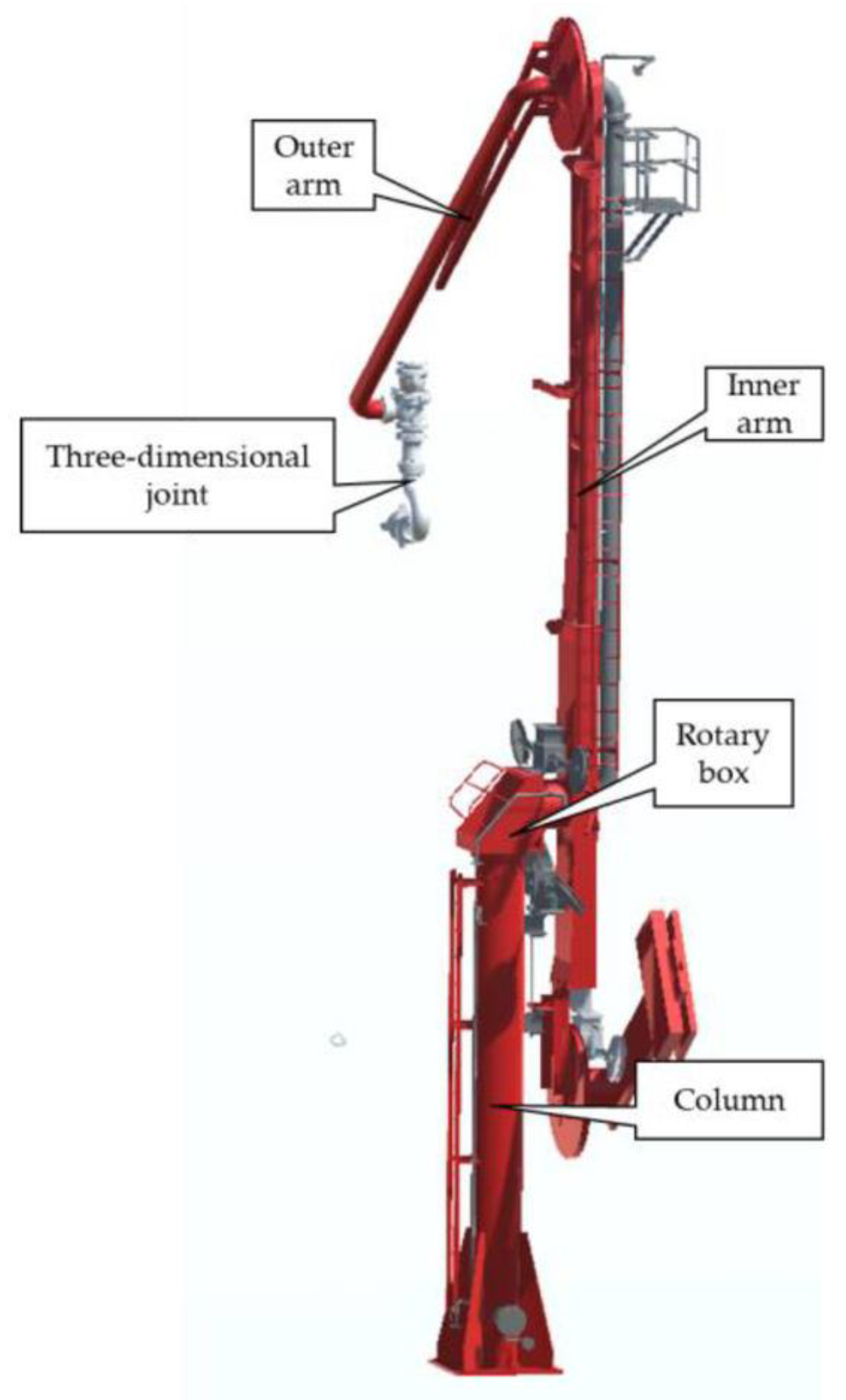
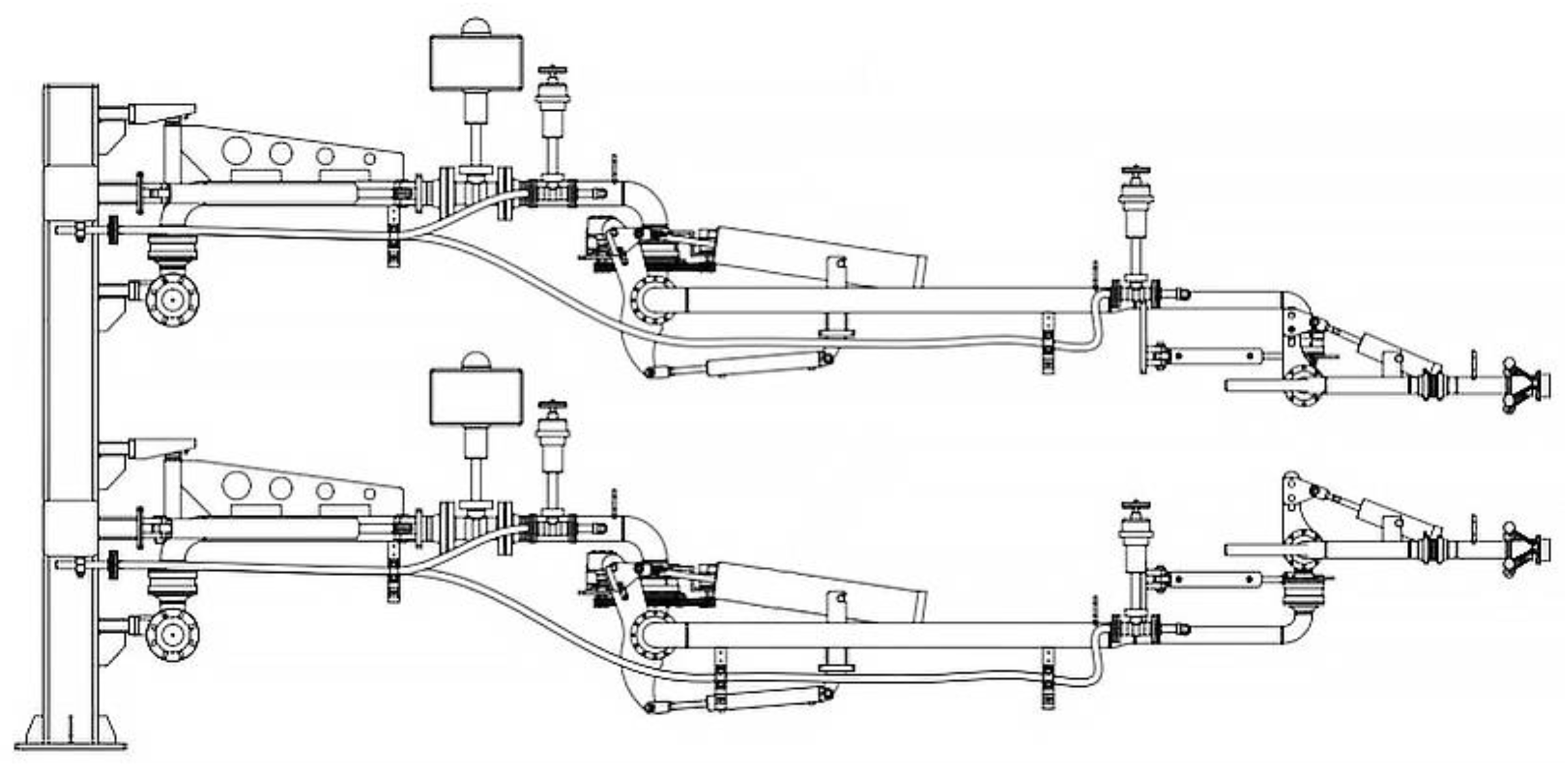
3.1. Overall Structure of the Land-Used Loading Arm
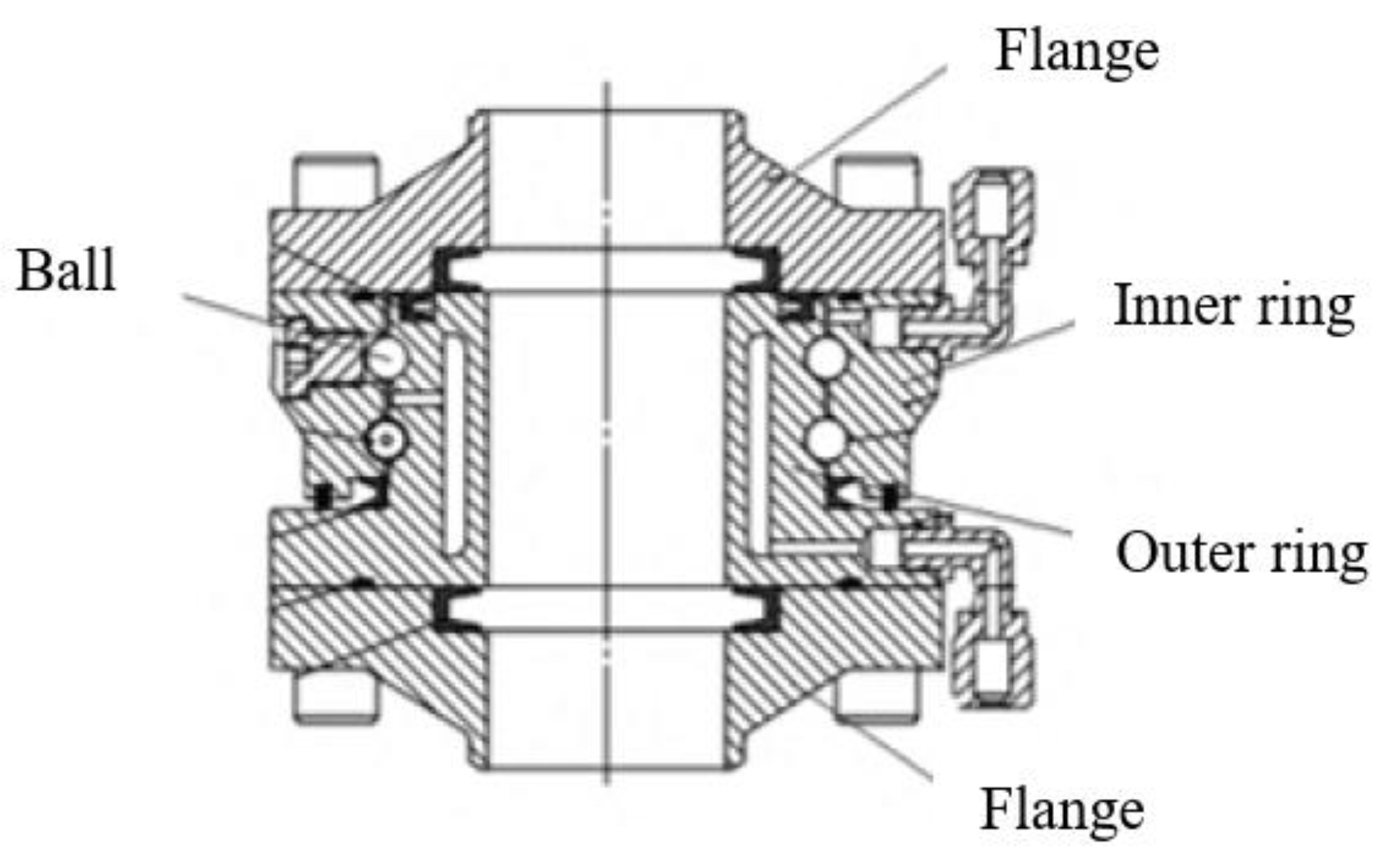
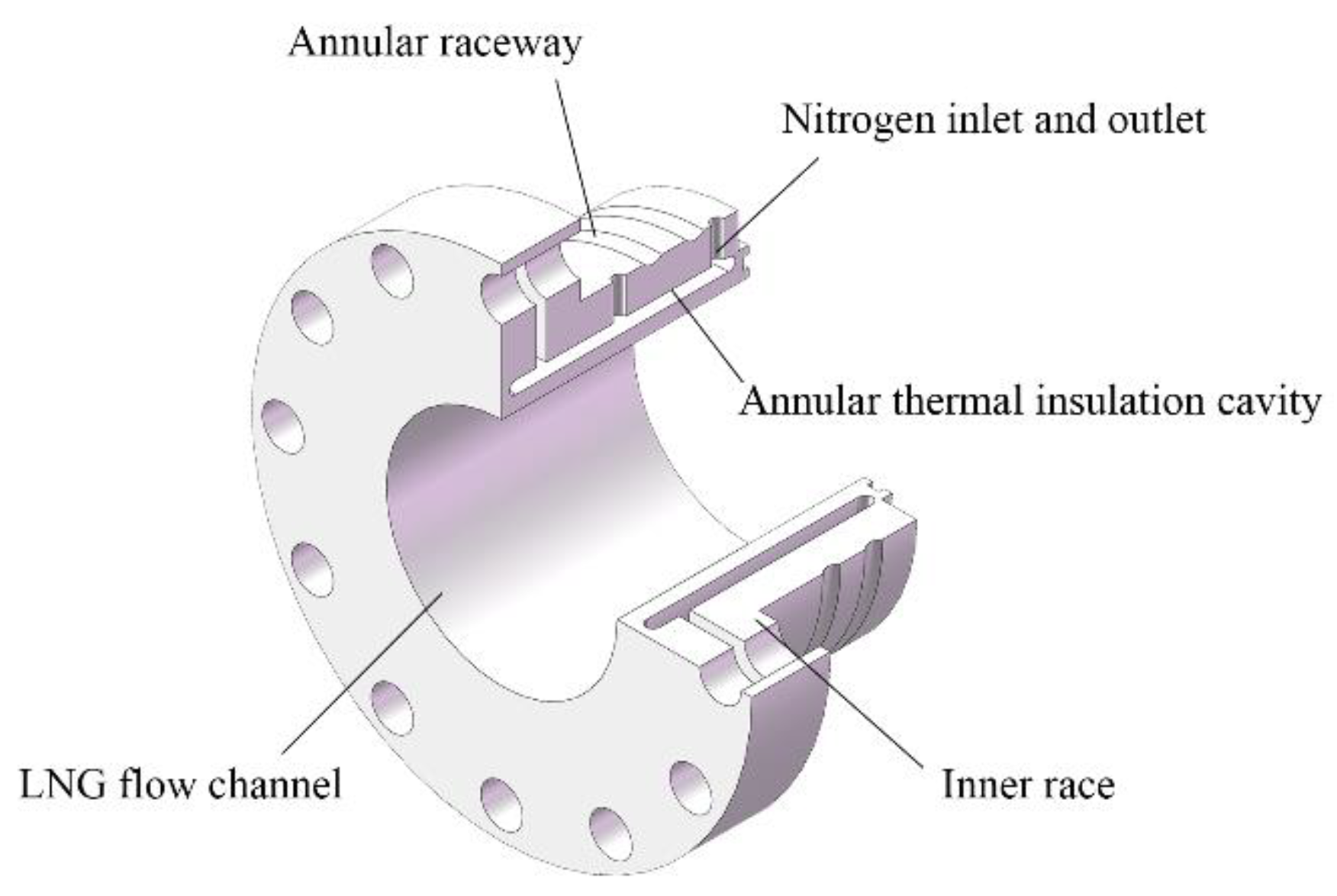
3.1.1. Rotary Joints and Sealing of the Land-Used Loading Arm
3.1.2. Cryogenic Breakaway Valve
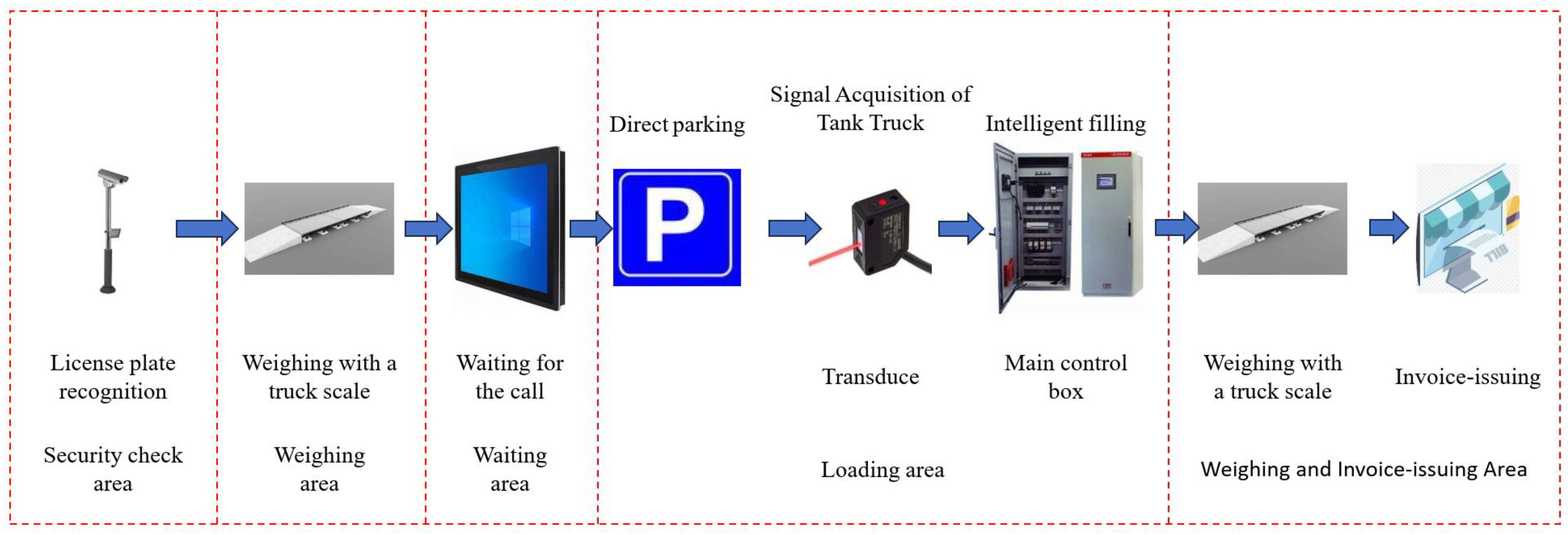
3.2. Land-Used Loading Arm Actuation and Its Intelligence and Automation
4. Challenges and Opportunities
4.1. Challenges
- (1)
- The challenge of LNG loading arms in flange recognition lies in high-precision and high-robustness visual perception within dynamic and complex environments. During tanker loading and docking, influenced by waves, wind loads, etc., hull sway causes continuous changes in the position and posture of the target flange. Traditional monocular or stereo vision is prone to parallax errors; affected by light, extreme weather, etc., the recognition accuracy of the target flange is poor;
- (2)
- Sway leads to continuous changes in the relative position between the hull and the loading arm. If the trajectory planning fails to compensate for the sway displacement in a timely manner, a collision will occur. Currently, in path-planning technology, no algorithm can simultaneously meet the requirements of global convergence, real-time solution, accuracy, universality, and simplicity of solution;
- (3)
- In low-temperature environments, the fluid viscosity of traditional hydraulic systems increases sharply, easily causing motion lag or stagnation. At present, the power module of loading arms is transitioning from traditional hydraulic power units to fully electric drive systems, used for swivel-joint rotation, triggering quick-connection devices (QC/DCs), and emergency release systems (ERS). This can effectively avoid hydraulic oil leakage risks and offers higher precision, shorter response times, etc. However, the motor must maintain stable output at −162 °C. Insulation materials of traditional motors may fail due to low-temperature hardening or shrinkage; at low temperatures, the lubrication system fails, exacerbating wear on gears, bearings, etc., and increasing torque requirements during motor start-up; temperature differences may cause condensed water inside the motor, which damages insulation materials after freezing; low temperatures reduce the resistance parameters of motor windings, affecting motor stability and leading to decreased efficiency and control accuracy;
- (4)
- The multi-degree-of-freedom joints of loading arms need to synchronously respond to hull sway, demanding a higher response speed from the control system. Traditional PID control is easily affected by coupling interference. Under hydraulic–electric hybrid drive, it is difficult to eliminate the overshoot phenomenon, and parameter tuning relies on experience;
- (5)
- The complex terminal environment causes communication delays, impacting the real-time control of loading arms.
- (1)
- Currently, sealing measures for loading arms mostly adopt a double-seal structure, but under long-term operation at −162 °C, they still face challenges such as material shrinkage, elastic failure, and low-temperature embrittlement;
- (2)
- The pull-off valve faces conflicting demands between “stable connection” and “instant disconnection”, making it difficult to simultaneously meet the two conditions of “secure connection during normal operation” and “easy disconnection in emergencies”;
- (3)
- Emergency release devices generally have supporting hydraulics, and the hydraulic oil pump operates for long periods. When an emergency occurs, due to unstable hydraulics, the emergency release device cannot perform normal emergency disconnection;
- (4)
- At −162 °C, the combination of ice accumulation and salt–fog corrosion on the sealing surface accelerates wear. Current de-icing systems (such as nitrogen purging) are inefficient.
4.2. Opportunities
5. Conclusions
- In the field of marine loading and unloading arms, it systematically analyzes the design of full-balance/rotary-balance/double-balance structures, the multi-sealing coordination mechanism of cryogenic swivel joints, the rapid-response principle of emergency disconnection devices, and the intelligent docking technology based on vision–multi-sensor fusion;
- In the field of land-based loading and unloading arms, it focuses on the mechanical optimization model of the spring cylinder balance system, the sealing materials of cryogenic butterfly valves, the automated control strategies for multi-vehicle parallel loading and unloading, and the unmanned docking technology based on trajectory planning algorithms.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kanbur, B.B.; Xiang, L.; Dubey, S.; Choo, F.H.; Duan, F. Cold utilization systems of LNG: A review. Renew. Sustain. Energy Rev. 2017, 79, 1171–1188. [Google Scholar] [CrossRef]
- Iqbal, J.; Khan, Z.H. The potential role of renewable energy sources in robot’s power system: A case study of Pakistan. Renew. Sustain. Energy Rev. 2017, 75, 106–122. [Google Scholar] [CrossRef]
- Yuan, L. Analysis of current development status and prospects of China’s natural gas chemical industry. Low-Carbon Chem. Chem. Eng. 2024, 49, 105–112. [Google Scholar]
- Gao, Y.; Wang, B.; Hu, Y.; Gao, Y.; Hu, A. Development of China’s natural gas: Review 2023 and outlook 2024. Nat. Gas Ind 2024, 44, 166–177. [Google Scholar]
- Stavrou, D.I.; Ventikos, N.P.; Mavrakos, S.A. Dynamic monitoring of risk failure of loading arms for LNG site-by-site operations. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Rhodes, Greece, 26 June–2 July 2016; p. ISOPE-I-16-410. [Google Scholar]
- Liu, Y.; Yang, L.; Jing, Y.X. Research and analysis on the technical status of LNG handling system. Pet. Chem. Equip. 2020, 23, 44–48. [Google Scholar]
- Orellana, F.; Durán, O.; Vergara, J.I.; Arata, A. Maintainability Analysis of Remotely Operated LNG Marine Loading Arms Based on UNE 151001 Standard. Machines 2024, 12, 407. [Google Scholar] [CrossRef]
- Li, T.T.; He, X.; Gao, P. Analysis of offshore LNG storage and transportation technologies based on patent informatics. Clean. Eng. Technol. 2021, 5, 100317. [Google Scholar] [CrossRef]
- Liang, X. Research and Design of Automatic Centering and Hydraulic Control System for Fluid Handling Arm. Master’s Thesis, Northeast Forestry University, Harbin, China, 4 January 2023. [Google Scholar]
- Sun, L.P.; Zhang, S.K. The Development History of Fluid Loading and Unloading Equipment in China. Chem. Eng. Manag. 2013, 18, 172. [Google Scholar] [CrossRef]
- Dirik, C.; Biak, D.R.A.; Ibrahim, N.N.L.N. Externally initiated event in sequential risk assessment for the onshore LNG marine loading arm unit. J. Loss Prev. Process Ind. 2022, 75, 104717. [Google Scholar] [CrossRef]
- Li, M.; Zhou, Y.; Yu, B.; Shi, G.Z.; Xia, H.B. Low-temperature heat transfer and stress analysis of LNG loading arm pipeline supports. J. Phys. Conf. Ser. 2022, 2395, 012002. [Google Scholar] [CrossRef]
- Chen, G.X.; Jin, Y.S. Key technologies in the assembly process of LNG unloading arm. Oil Gas Storage Transp. 2015, 34, 874–878. [Google Scholar]
- Hu, X.; Yu, B. Structural optimization design of LNG unloading arm based on finite element analysis. In Proceedings of the Eighth International Conference on Electromechanical Control Technology and Transportation (ICECTT 2023), Hangzhou, China, 19–21 May 2023; pp. 175–182. [Google Scholar]
- Xiang, R.; Feng, W.; Song, S.; Zhang, H. Automated Docking System for LNG Loading Arm Based on Machine Vision and Multi-Sensor Fusion. Appl. Sci. 2025, 15, 2264. [Google Scholar] [CrossRef]
- Wang, X.B. Design of counterweight balancing system for LNG loading and unloading arm. Hoisting Conveying Mach. 2020, 8, 81–85. [Google Scholar]
- Meng, J.; Feng, S.G. Development, Testing and Research of Low-temperature and Fast connection Devices. Mech. Electr. Inf. 2021, 27, 45–48. [Google Scholar] [CrossRef]
- Long, L.; Bo, M.; Qi, W. Research on Influences of Dike Dam on the Law of LNG Release and Dispersion. New Technol. New Process 2014, 12, 115–118. [Google Scholar]
- Wang, L.M.; Huang, W.D.; Xu, X.T. Experimental Research on Large-diameter LNG Rotary Joints. Public Commun. Sci. Technol. 2014, 9, 187–188. [Google Scholar]
- Tao, W.; Jiali, W. Analysis of Manufacture and Leakage for Low Temperature Crane Tubes. New Technol. New Process 2022, 10, 1–4. [Google Scholar] [CrossRef]
- Huang, C.C. Comparative Analysis of the Application of LNG Loading Arm Rotary Joints. Plant Maint. Eng. 2020, 11, 127–128. [Google Scholar] [CrossRef]
- Pereira, E.; Alkali, B.; Niculita, O. Liquefied natural gas plant maintenance: A case study of marine loading arms seal failure analysis. In Proceedings of the 30th European Safety and Reliability Conference and 15th Probabilistic Safety Assessment and Management Conference: ESREL 2020 and PSAM15 2020, Venice, Italy, 21–26 June 2020; pp. 843–848. [Google Scholar]
- Wang, X.C.; Xu, J. Analysis of the Process Technology and the Inevitability of Domestication of LNG Marine Loading Arms. China High-Tech Enterp. 2015, 8, 82–85. [Google Scholar] [CrossRef]
- Yu, Y.; Hong, L.; Fuhua, S.; Cheng, Z.; Rican, Y. Analysis of the Process Technology and the Necessity of Domestication of LNG Marine Loading Arms. Agric. Equip. Technol. 2017, 43, 40–41. [Google Scholar]
- Pan, H.T. Application of Loading Arm Emergency Release System (ERS) on Oil & Gas Terminals. Port Waterw. Eng. 2004, 10, 50–53. [Google Scholar] [CrossRef]
- Paquet, S.; Lamourette, C.; Auburtin, E.; Hellesmark, S.; Thorsen, T. Safe LNG loading of conventional LNG carriers in severe open sea environments. In Proceedings of the Offshore Technology Conference Asia, Kuala Lumpur, Malaysia, 22–25 March 2016; p. D021S013R002. [Google Scholar]
- Mei, J.; Feng, W.; Liang, Z. Improved Design of LNG Marine Loading Arm Docking Method Based on TRIZ Theory. Appl. Sci. 2023, 13, 4525. [Google Scholar] [CrossRef]
- Nijak, M.; Skrzypczyński, P.; Ćwian, K.; Zawada, M.; Szymczyk, S.; Wojciechowski, J. On the importance of precise positioning in robotised agriculture. Remote Sens. 2024, 16, 985. [Google Scholar] [CrossRef]
- Zhou, Q.; Yamada, S.; Robbe, P.; Charlet, D.; Itoh, R.; Nakao, M.; Suzuki, S.; Kunigo, T.; Jules, E.; Plaige, E. PCI-express based high-speed readout for the Belle II DAQ upgrade. IEEE Trans. Nucl. Sci. 2021, 68, 1818–1825. [Google Scholar] [CrossRef]
- Islam, A.; Asikuzzaman, M.; Khyam, M.O.; Noor-A-Rahim, M.; Pickering, M.R. Stereo vision-based 3D positioning and tracking. IEEE Access 2020, 8, 138771–138787. [Google Scholar] [CrossRef]
- Li, Z.; Li, S.; Shi, C.; Yang, J.; Chen, R. Automatic Docking System for Ship Shore LNG Loading and Unloading Arms. CN111915718A. Available online: http://epub.cnipa.gov.cn/Dxb/PatentDetail (accessed on 9 April 2025).
- Zheng, Y.; Liu, P.; Qian, L.; Qin, S.; Liu, X.; Ma, Y.; Cheng, G. Recognition and depth estimation of ships based on binocular stereo vision. J. Mar. Sci. Eng. 2022, 10, 1153. [Google Scholar] [CrossRef]
- Tian, X.; Liu, R.; Wang, Z.; Ma, J. High quality 3D reconstruction based on fusion of polarization imaging and binocular stereo vision. Inf. Fusion 2022, 77, 19–28. [Google Scholar] [CrossRef]
- Ma, Y.; Li, Q.; Chu, L.; Zhou, Y.; Xu, C. Real-time detection and spatial localization of insulators for UAV inspection based on binocular stereo vision. Remote Sens. 2021, 13, 230. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhao, J.; Fang, S.; Wang, M.; Zhang, Q. Research on Automatic Locating Method for Large Hydraulically-Driven Loading Arm Based on Visual Servo; IEEE: New York, NY, USA, 2018; pp. 855–860. [Google Scholar] [CrossRef]
- He, L.; Chen, Y.; Zhao, J. Automatic Docking Recognition and Location Algorithm of Port Oil Loading Arm Based on 3D Laser Point Cloud. In Proceedings of the 2020 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 13–16 October 2020; pp. 615–620. [Google Scholar]
- Cognex Launches the In-Sight 3D-L4000 Vision System. Electronics Quality 2021, 78–79. Available online: https://qikan.cqvip.com/Qikan/Article/Detail?id=7103894052 (accessed on 12 February 2025).
- Yu, Q.; Hu, L.; Alzahrani, B.; Baranawi, A.; Alhindi, A.; Chen, M. Intelligent visual-IoT-enabled real-time 3D visualization for autonomous crowd management. IEEE Wirel. Commun. 2021, 28, 34–41. [Google Scholar] [CrossRef]
- Lee, J.; Ni, J.; Singh, J.; Jiang, B.; Azamfar, M.; Feng, J. Intelligent maintenance systems and predictive manufacturing. J. Manuf. Sci. Eng. 2020, 142, 110805. [Google Scholar] [CrossRef]
- Peng, R.G.; Zhu, B.R.; Li, H.; Chen, X.H. Analysis of Using Domestic LNG Unloading Arms in Domestic LNG Terminals. Constr. Mach. Equip. 2024, 55, 196–200+115–116. [Google Scholar]
- Li, Y. Research and application of deep learning in image recognition. In Proceedings of the 2022 IEEE 2nd international conference on power, electronics and computer applications (ICPECA), Shenyang, China, 21–23 January 2022; pp. 994–999. [Google Scholar]
- Tian, Y. Artificial intelligence image recognition method based on convolutional neural network algorithm. IEEE Access 2020, 8, 125731–125744. [Google Scholar] [CrossRef]
- Jacob, I.J.; Darney, P.E. Design of deep learning algorithm for IoT application by image based recognition. J. ISMAC 2021, 3, 276–290. [Google Scholar] [CrossRef]
- Rawat, R.; Yadav, R. Big data: Big data analysis, issues and challenges and technologies. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Bapatla, Andhra, 7–8 May 2021; p. 012014. [Google Scholar]
- Botín-Sanabria, D.M.; Mihaita, A.-S.; Peimbert-García, R.E.; Ramírez-Moreno, M.A.; Ramírez-Mendoza, R.A.; Lozoya-Santos, J.d.J. Digital twin technology challenges and applications: A comprehensive review. Remote Sens. 2022, 14, 1335. [Google Scholar] [CrossRef]
- Zhong, D.; Xia, Z.; Zhu, Y.; Duan, J. Overview of predictive maintenance based on digital twin technology. Heliyon 2023, 9, e14534. [Google Scholar] [CrossRef]
- Ye, W.C. Railway Transportation of LPG: A Risk Assessment of LPG in the Course of Load-and-Unload. Adv. Mater. Res. 2014, 1030–1032, 2078–2081. [Google Scholar]
- Jiang, W.M. Analysis of Storage and Transportation Issues of Liquefied Natural Gas (LNG). China Pet. Chem. Stand. Qual. 2021, 41, 7–9. [Google Scholar]
- Gang, L.; Yan, H. On the selection of closed quantitative loading mode of large and small crane pipes for railway transportation of light oil products. Chem. Eng. Manag. 2017, 14. Available online: https://kns.cnki.net/kcms2/article/abstract?v=O_n6o0K2eiodvivkUjBJm9W3pEodboT4bpCl6daiT2j8U6WE_DDQaY1Bdj630axtDa0bgSTaWY8mRYy2VJPznAuiQwhkM4eL6wCcRfWbw4Rklxt1ZAc8Df9pL3h_e0aP43q6dYt3PWwSv7Nm-j1ghfMw5esZoEW804ajewn6DCLBzv_KEIoDgmv79m1dbDI_-SugFWVkRx0=&uniplatform=NZKPT&language=CHS (accessed on 9 April 2025).
- Liu, M.Q.; Li, Z.Z.; Liu, J.; Ma, Z.G.; Xu, M.L.; Lyu, S.K. Research on identification method for interface flange in automatic docking system of fluid loading and unloading arm for bottom loading. Appl. Sci. 2022, 12, 3037. [Google Scholar] [CrossRef]
- Wróblewski, P. Technology for Obtaining Asymmetries of Stereometric Shapes of the Sealing Rings Sliding Surfaces for Selected Anti-Wear Coatings; SAE Technical Paper: Pittsburgh, PA, USA, 2020; pp. 0148–7191. [Google Scholar]
- Zhang, S.; Dong, Y.; Yang, K. Finite element analysis of a dry quick coupling device for an LNG hose conveying system. In Proceedings of the Sixth International Conference on Information Science, Electrical, and Automation Engineering (ISEAE 2024), Wuhan, China, 19–21 April 2024; pp. 514–520. [Google Scholar]
- Lin, B.; Sao, X.F.; Li, Y.M.; Li, Y.J.; Du, K.J. Research and Design of Low Temperature Swivel Joint for LNG Loading and Pry. Agric. Equip. Technol. 2020, 46, 38–41. [Google Scholar]
- Ma, C.; Cheng, Y.C.; Liu, W. Failure Analysis and Improvement of Sealing for Liquefied Ammonia Loading and Unloading Crane Pipes. Plant Maint. Eng. 2019, 9, 71–73. [Google Scholar] [CrossRef]
- Lei, F.S.; Guo, H.T. Failure mechanism research and optimization design of low temperature rotary joint of LNG loading arm. Gen. Mach. 2018, 8, 16–18+24. [Google Scholar] [CrossRef]
- Rino, N.N. Effective modeling of spiral wound gasket with graphite filler in gasketed flange joint subjected to bending loads. Mater. Today Proc. 2021, 44, 2199–2204. [Google Scholar]
- Yong, Q. Application of Polytetrafluoroethylene on Fluid Sealing. Petro-Chem. Equip. Technol. 2005, 3, 50-53+69. [Google Scholar]
- Shang, Y.W.; Yao, G.C.; Wang, W.H.; Ma, R. Design of New Low Temperature Detachable Swivel Joint. Nat. Gas Oil 2015, 33, 80–82+13. [Google Scholar]
- Wu, Y.F.; Wei, H.X.; Wu, S.P.; Cheng, J.; Zhou, J.; Wang, J.R.; Zeng, X.B.; Sheng, W. Technical Status and Standard Requirement Analysis of Marine Ultra Low Temperature Break Valve for LNG Transmission. Shipbuild. Stand. Qual. 2019, 5, 21–25+31. [Google Scholar]
- Sreekanth, N.; Sankaran, S.; Kenned, J.J. Development of soft seal and experimental investigation of soft seated safety relief valves for cryogenic applications. Cryogenics 2025, 146, 104005. [Google Scholar] [CrossRef]
- Moore, B.; Maddocks, J.; Miller, F. Development and testing of a passive check valve for cryogenic applications. Cryogenics 2014, 64, 244–247. [Google Scholar] [CrossRef]
- Izidio, D.M.; Ferreira, A.P.; Medeiros, H.R.; Barros, E.N.d.S. An embedded automatic license plate recognition system using deep learning. Des. Autom. Embed. Syst. 2020, 24, 23–43. [Google Scholar] [CrossRef]
- Shi, H.; Zhao, D. License plate recognition system based on improved YOLOv5 and GRU. IEEE Access 2023, 11, 10429–10439. [Google Scholar] [CrossRef]
- Zhang, C.; Song, P.; Xiao, L.; Zhang, Y.; Wang, X.; Hou, J.; Wang, X.; Lu, L. Research and development of on-site small skid-mounted natural gas to hydrogen generator in China. Int. J. Hydrogen Energy 2023, 48, 18601–18611. [Google Scholar] [CrossRef]
- Zhou, S.H.; Song, K.; Chen, H.P. Design and research on smart loading system of LNG road tanker. Nat. Gas Oil 2021, 39, 38–43. [Google Scholar]
- Yang, L.; Zhang, Y.; Ruan, H. Research on BeiDou satellite positioning algorithm based on GPRS technology. Mob. Inf. Syst. 2021, 2021, 2468267. [Google Scholar] [CrossRef]
- Mir, I.; Gul, F.; Mir, S.; Khan, M.A.; Saeed, N.; Abualigah, L.; Abuhaija, B.; Gandomi, A.H. A survey of trajectory planning techniques for autonomous systems. Electronics 2022, 11, 2801. [Google Scholar] [CrossRef]
- Wang, J.; Li, X.; Jin, Y.; Zhong, Y.; Zhang, K.; Zhou, C. Research on image recognition technology based on multimodal deep learning. In Proceedings of the 2024 IEEE 2nd International Conference on Image Processing and Computer Applications (ICIPCA), Shenyang, China, 28–30 June 2024; pp. 1363–1367. [Google Scholar]
- Dai, Y.; Xiang, C.; Zhang, Y.; Jiang, Y.; Qu, W.; Zhang, Q. A Review of Spatial Robotic Arm Trajectory Planning. Aerospace 2022, 9, 361. [Google Scholar] [CrossRef]
- Liang, J.; Luo, W.; Qin, Y. Path Planning of Multi-Axis Robotic Arm Based on Improved RRT∗. Comput. Mater. Contin. 2024, 81, 1009–1027. [Google Scholar] [CrossRef]
- Huang, A.; Yu, C.; Feng, J.; Tong, X.; Yorozu, A.; Ohya, A.; Hu, Y. A motion planning method for winter jujube harvesting robotic arm based on optimized Informed-RRT* algorithm. Smart Agric. Technol. 2025, 10, 100732. [Google Scholar] [CrossRef]
- Ekrem, Ö.; Aksoy, B. Trajectory planning for a 6-axis robotic arm with particle swarm optimization algorithm. Eng. Appl. Artif. Intell. 2023, 122, 106099. [Google Scholar] [CrossRef]
- Elgohr, A.T.; Khater, H.A.; Mousa, M.A. Trajectory Optimization for 6 DOF Robotic Arm Using WOA, GA, and Novel WGA Techniques. Results Eng. 2025, 25, 104511. [Google Scholar] [CrossRef]
- Islam, R.U.; Iqbal, J.; Manzoor, S.; Khalid, A.; Khan, S. An autonomous image-guided robotic system simulating industrial applications. In Proceedings of the 2012 7th International Conference on System of Systems Engineering (SoSE), Genova, Italy, 16–19 July 2012; pp. 344–349. [Google Scholar]
- Jiang, F.; Chen, K.; Chen, Y.; Tian, C. Trajectory planning and automatic docking of LNG five-axis loading arm. Eng. Comput. 2024, 41, 2118–2133. [Google Scholar] [CrossRef]
- Xi, C.; Hongzhou, C.; Jiangtao, L.; Jingtao, D.; Yue, X. Application of automatic positioning truss crane tube system in condensate loading trestle. Petrochem. Ind. Technol. 2022, 29, 136–137. [Google Scholar]
- Bin, W.; Yong, W.; YuanJie, Z. Application Research of LNG Semi Automatic Loading and Unloading Arm. Mech. Eng. Technol. 2022, 11, 699–707. [Google Scholar] [CrossRef]
- National Pipeline Network Group Construction Project Management Branch. The Intelligent Loading and Management System for Tank Trucks at the Shandong Longkou Nanshan LNG Receiving Terminal Has Passed the Review. Available online: https://gas.in-en.com/html/gas-3680272.shtml (accessed on 15 November 2024).
- Zhou, J.J.; Zhang, X.X.; Qian, M.F.; Li, A.B.; Geng, L. Research Progress on Low-Temperature Performance of Common Structural Materials. J. Aeronaut. Mater. 2024, 44, 72–86. [Google Scholar] [CrossRef]
- Yao, J.; Zhao, G.; Niu, X.; Zhang, R.; Zhang, J. Wear mechanism and underground structure of Inconel 625 nickel-based alloy sliding against WC-Co in seawater. Wear 2024, 546, 205365. [Google Scholar] [CrossRef]
- ISO 20519:2021(E); Ships and Marine Technology—Specification for Bunkering of Liquefied Natural Gas Fuelled Vessels. ISO Copyright Office: Geneva, Switzerland, 2021.
- GB/T 44412-2024; Ships and Marine Technology—Specification for Bunkering of Liquefied Natural Gas Fuelled Vessels. Standardization Administration of China: Beijing, China, 2024.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparative Domain | Automatic Docking | Manual Docking |
|---|---|---|
| Operational efficiency | Fully automated, unmanned operation with short single loading/unloading time | Manual skill-dependent operations with long loading/unloading time |
| Docking accuracy | Visual positioning, both axial and angular deviations are relatively small | Manual visual docking, high deviation |
| Safety performance | Real-time sensor surveillance, EBS achieves a 0.5 s response time | High risk of human error, high accident rate |
| Cost | Low labor cost, long-term operation and maintenance cost | Great demand for operators, long training cycle for manual operations |
| Environmental adaptability | Strong anti-interference capability | Operational challenges in cold weather |
| Comparative Domain | Joint Space | Cartesian Space |
|---|---|---|
| Task types | Point-to-point, high-speed motion | Trajectory tracking, high-precision motion control |
| Computational complexity | Only the joint differences are required, inverse kinematics solution is not needed | Real-time inverse kinematics solution |
| Precision | The end trajectory may have errors due to mechanical errors or flexible deformation | Plan the end trajectory directly, the end path is strictly controllable |
| Obstacle avoidance capability | Difficult to directly perceive the relationship between environmental obstacles and the end path | Combine with the environmental model to avoid obstacles |
| Motion smoothness | The joint motion parameters are directly controlled, the speed and acceleration are continuous | The end path is smooth, the joint movement may change abruptly |
| Material Type | Advantages | Disadvantages | Application Scenarios |
|---|---|---|---|
| Austenitic stainless steel | Good low-temperature toughness and strong corrosion resistance | High density, prone to stress corrosion when welded improperly | Rotary joints, pipelines, support structures |
| Aluminum alloy | Light weight and good corrosion resistance | Lower strength, vulnerable to mechanical damage | Lightweight design |
| Polytetrafluoroethylene (PTFE) | Good low-temperature resistance and low friction coefficient | Easily worn | Sealing parts |
| Nickel-based alloy [80] | Excellent low-temperature and corrosion resistance, high strength | High cost, difficult to process | Key sealing components, high-stress areas |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Wang, J.; Zhang, H.; Zhang, Y.; Zhu, J.; Zhu, K. The Evolution and Development Trends of LNG Loading and Unloading Arms. Appl. Sci. 2025, 15, 4316. https://doi.org/10.3390/app15084316
Liu M, Wang J, Zhang H, Zhang Y, Zhu J, Zhu K. The Evolution and Development Trends of LNG Loading and Unloading Arms. Applied Sciences. 2025; 15(8):4316. https://doi.org/10.3390/app15084316
Chicago/Turabian StyleLiu, Mingqin, Jiachao Wang, Han Zhang, Yuming Zhang, Jingquan Zhu, and Kun Zhu. 2025. "The Evolution and Development Trends of LNG Loading and Unloading Arms" Applied Sciences 15, no. 8: 4316. https://doi.org/10.3390/app15084316
APA StyleLiu, M., Wang, J., Zhang, H., Zhang, Y., Zhu, J., & Zhu, K. (2025). The Evolution and Development Trends of LNG Loading and Unloading Arms. Applied Sciences, 15(8), 4316. https://doi.org/10.3390/app15084316