The Logic-Based Supervisor Control for Sun-Tracking System of 1 MW HCPV Demo Plant: Study Case

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
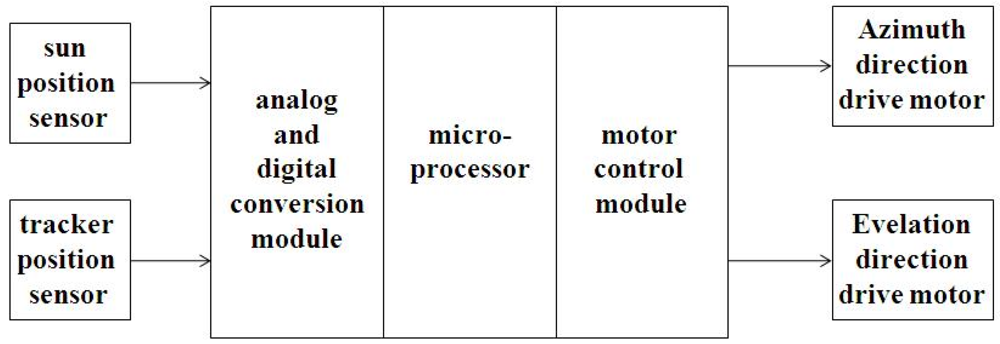
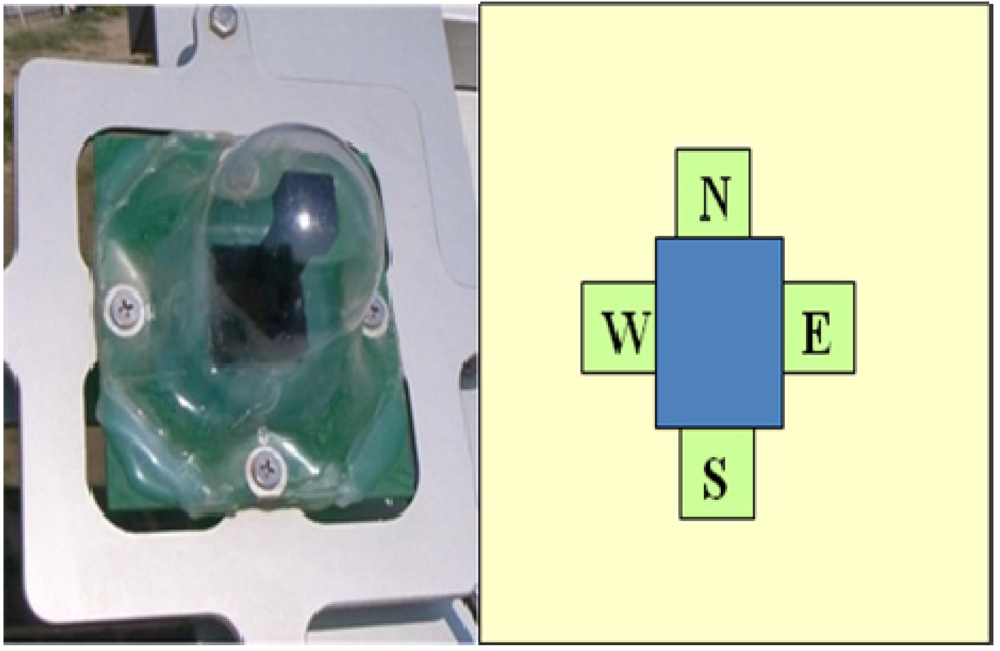
2. Analysis and Design of a Sun Tracking Control System
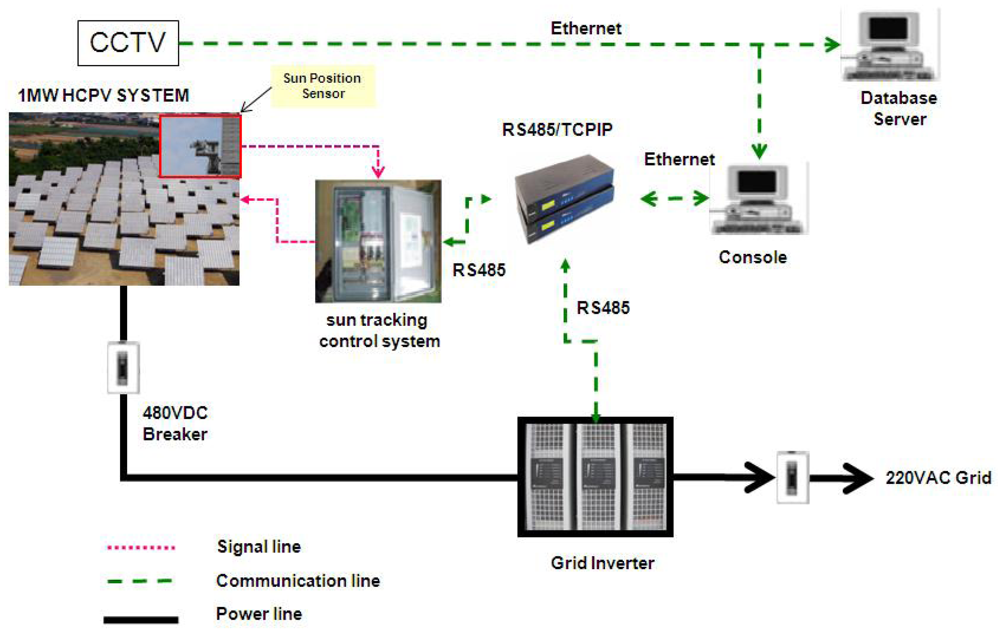
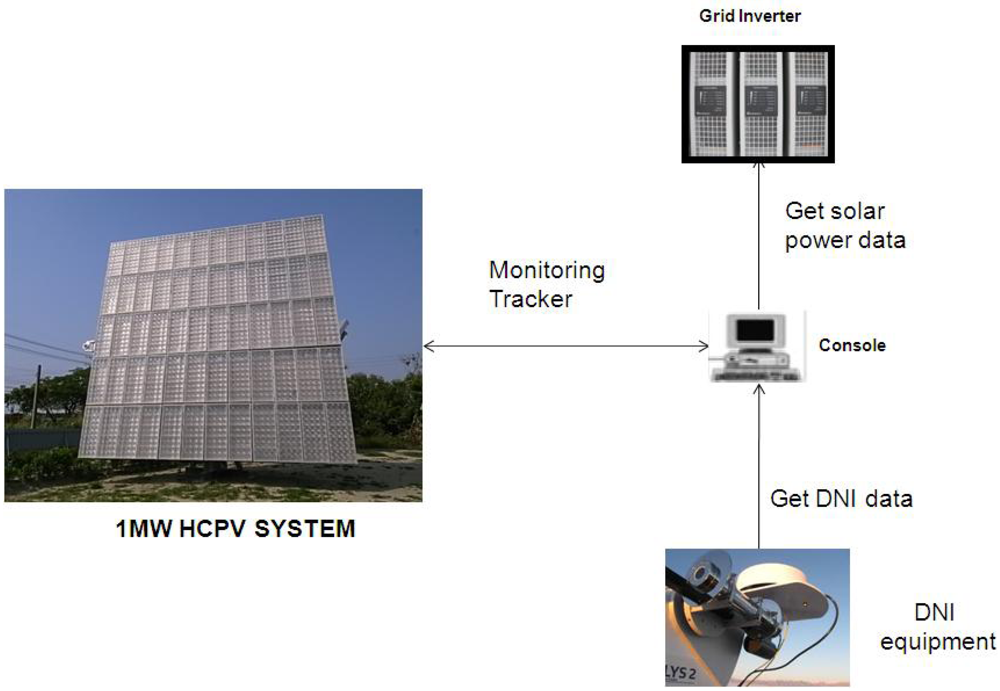
2.1. Power Plant Tracking and Monitoring System




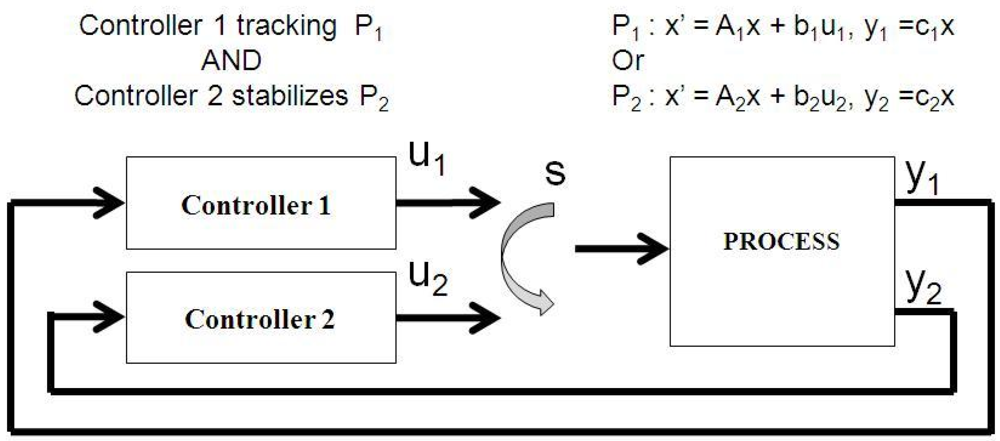
2.2. Problem Formulation





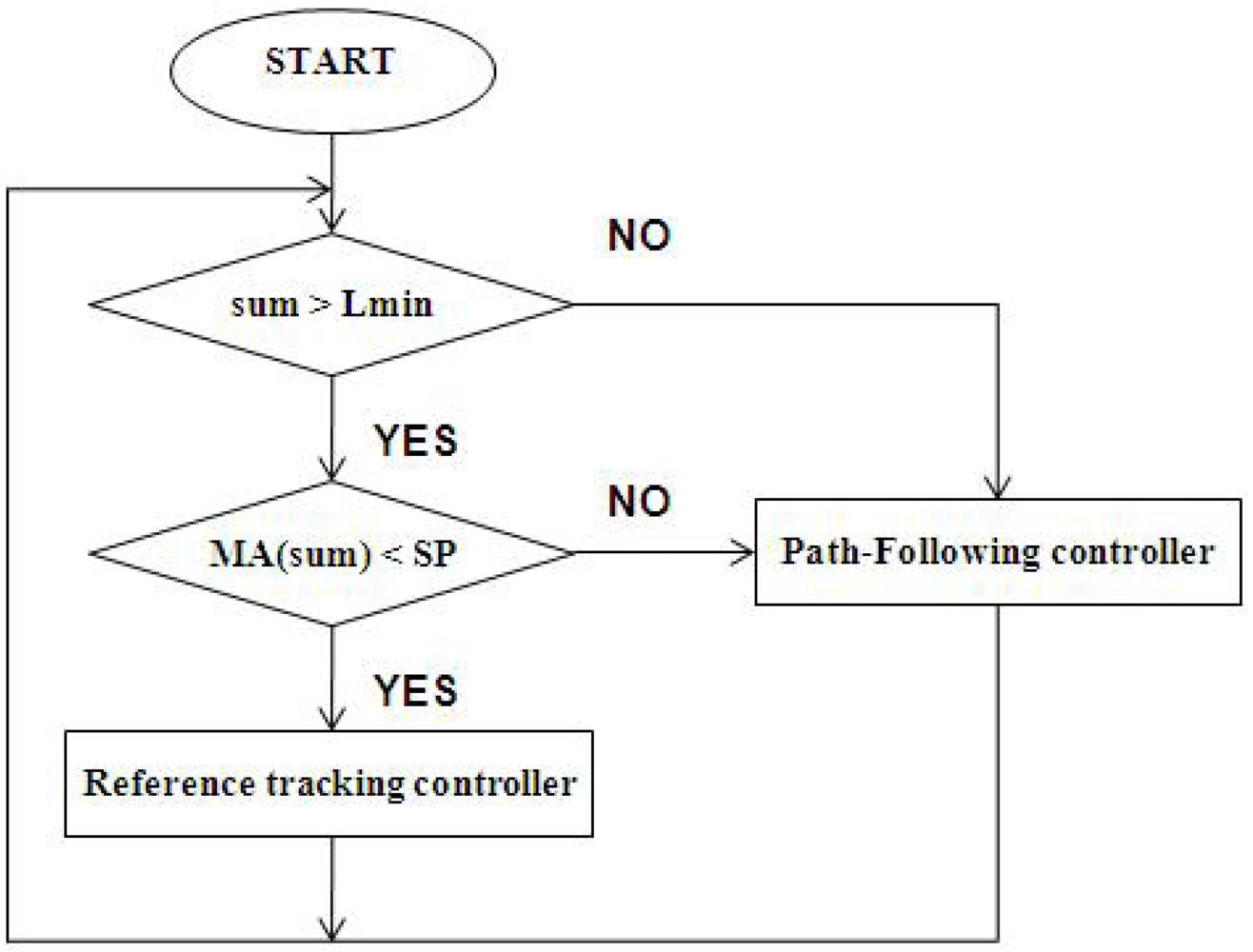
2.3. LBS Control Design






2.4. Experimental Setup

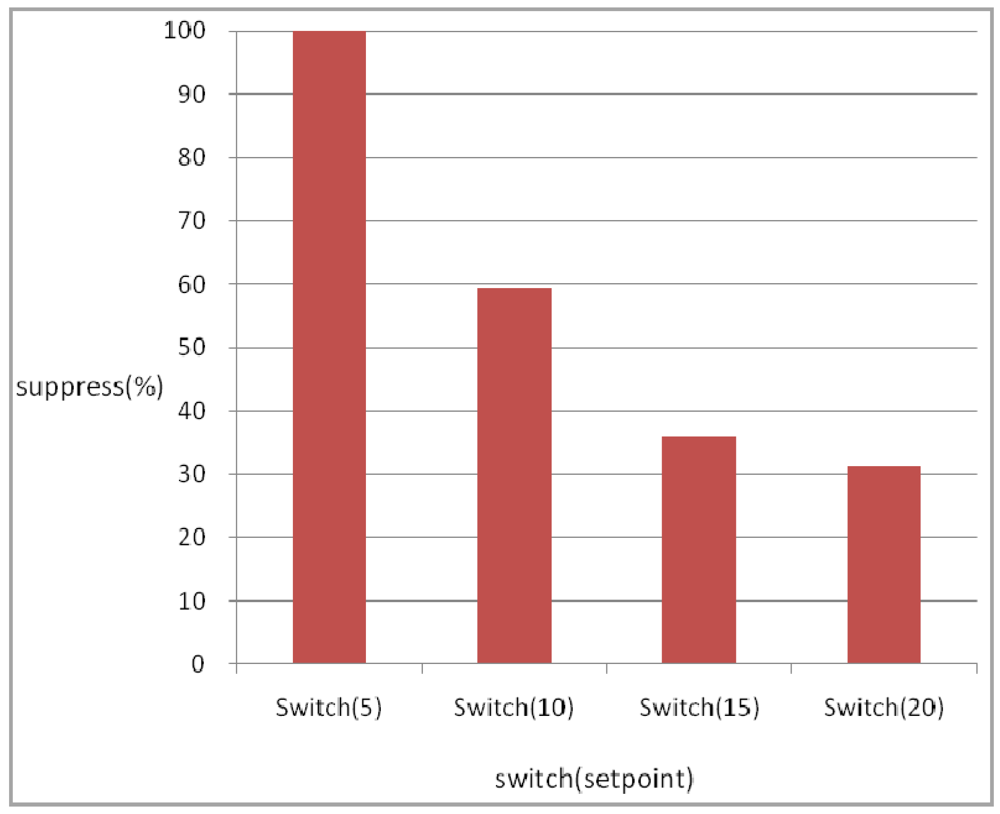
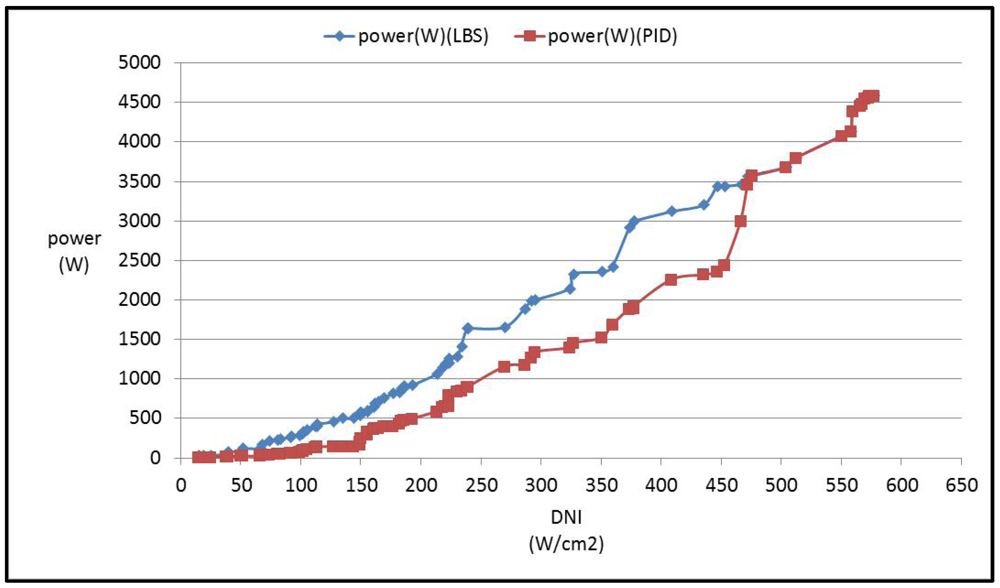
3. Results and Discussion


4. Conclusions
Acknowledgments
References and Notes
- Wai, R.J.; Wang, W.H.; Lin, C.Y. High-performance stand-alone photovoltaic generation system. IEEE Trans. Ind. Electron. 2008, 55, 240–250. [Google Scholar] [CrossRef]
- Khalil, A.A.; El-Singaby, M. Position control of sun tracking system. In Proceedings of the 46th IEEE International Midwest Symposium on Circuits and Systems, Cairo, Egypt, 27-30 December2003; pp. 1134–1137.
- Lung, I.-T.; Kuo, C.-T.; Shin, H.-Y.; Hong, H.-F.; Lee, C.-D.; Lin, T.-T. Establishment of One MW HCPV System at Taiwan. ISESCO Science and Technology Vision number 9. May 2010, 6, pp. 50–53. Available online: http://www.isesco.org.ma/ISESCO_Technology_Vision/NUM09/ISESCO%20Sce/Lung.pdf (accessed on 30 January 2012).
- Lee, C.-Y.; Chou, P.-C.; Chiang, C.-M.; Lin, C.-F. Sun Tracking Systems: A Review. Sensors 2009, 9, 3875–3890. [Google Scholar] [CrossRef]
- Chong, K.-K.; Wong, C.-W.; Siaw, F.-L.; Yew, T.-K.; Ng, S.-S.; Liang, M.-S.; Lim, Y.-S.; Lau, S.-L. Integration of an On-Axis General Sun-Tracking Formula in the Algorithm of an Open-Loop Sun-Tracking System. Sensors 2009, 9, 7849–7865. [Google Scholar] [CrossRef]
- Anton, I.; Perez, F.; Luque, I.; Sala, G. Interaction between sun tracking deviations and inverter MPP strategy in concentrators connected to grid. In Proceedings ofthe Twenty-Ninth IEEE Photovoltaic Specialists Conference, New Orleans, USA, 20–25 May 2002; pp. 1592–1595.
- Aracil, C.; Quero, J.M.; Castaner, L.; Osuna, R.; Franquelo, L.G. Tracking system for solar power plants. In Proceedings of the 32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 7–10 November 2006; pp. 3024–3029.
- Peng, Y.; Vrancic, D.; Hanus, R. Anti-windup, bumpless, and conditioned transfer techniques for PID controller. IEEE Control Syst. Mag. 1996, 16, 48–57. [Google Scholar] [CrossRef]
- Pritchard, D. Sun tracking by peak power positioning for photovoltaic concentrator arrays. IEEE Control Syst. Mag. 1983, 3, 2–8. [Google Scholar] [CrossRef]
- Rubio, F.R.; Ortega, M.G.; Gordillo, F.; Lopez-Martinez, M. Application of new control strategy for sun tracking. Energ. Convers. Manag. 2007, 48, 2174–2184. [Google Scholar] [CrossRef]
- Wai, R.J.; Wang, W.H. Grid-connected photovoltaic generation system. IEEE Trans. Circ. Syst. 2008, 55, 953–964. [Google Scholar] [CrossRef]
- Alata, M.; Al-Nimr, M.A.; Qaroush, Y. Developing a multipurpose sun tracking system using fuzzy control. Energ. Convers. Manag. 2005, 46, 1229–1245. [Google Scholar] [CrossRef]
- Choi, J.S.; Kim, D.Y.; Park, K.T.; Cho, C.H.; Chung, D.H. Design of fuzzy controller based on PC for solar tracking system. In Proceedings of International Conference on Smart Manufacturing Application, Gyeonggi-do, Korea, 9–11 April 2008.
- Taherbaneh, M.; Fard, H.G.; Rezaie, A.H.; Karbasian, S. Combination of fuzzy-based maximum power point tracker and sun tracker for deployable solar panels in photovoltaic systems. In Proceedings of IEEE International Fuzzy Systems Conference, London, UK, 23–26 July 2007; pp. 1–6.
- Yousef, H.A. Design and implementation of a fuzzy logic computer-controlled sun tracking system. In Proceedings of the IEEE International Symposium on Industrial Electronics, Bled, Slovenia, 12-16 July 1999; pp. 1030–1034.
- Maneri, E.; Gawronski, W. LQG controller design using GUI: Application to antennas and radio-telescopes. ISA Trans. 2000, 39, 243–264. [Google Scholar] [CrossRef]
- Gawronski, W. Antenna control systems: From PI to H -infinity. IEEE Anten. Propag. Mag. 2001, 43, 52–60. [Google Scholar] [CrossRef]
- Gawronski, W. Control and pointing challenges of large antennas and telescopes. IEEE Trans. Control Syst. Technol. 2007, 15, 276–289. [Google Scholar] [CrossRef]
- Doyle, J.C.; Glove, K.; Khargonekar, P.P.; Francis, B.A. State-space solutions to standard H2 and H∞ control problems. IEEE Trans. Autom. Control 1989, 34, 831–847. [Google Scholar] [CrossRef]
- Doyle, J.C.; Honeywell, I.; Minneapolis, M.N. Guaranteed margins for LQG regulators. IEEE Trans. Autom. Control 1978, 23, 756–757. [Google Scholar] [CrossRef]
- Saberi, A.; Sannuti, P.; Chen, B.M. H2 Optimal Control; Pretice-Hall: Englewood Cliffs, NJ, USA, 1995. [Google Scholar]
- Yung, C.-F.; Yeh, H.-Y.; Lee, C.-D.; Wu, J.-L.; Zhou, P.-C.; Feng, J.-C.; Wang, H.-X.; Peng, S.-J. Optimal regional pole placement for sun tracking control of high-concentration photovoltaic (HCPV) systems: Case study. Optim.Control Appl. Meth. 2010, 31, 581–591. [Google Scholar] [CrossRef]
- Sala, G.; Anton, I.; Arborio, J.C. Luque, A.; Camblor, E.; Mera, E.; Gasson, M.; Cendagorta, M.; Valera, P.; Friend, M.P.; et al. The 480 kWP EUCLIDESTM—Thermie Power Plant: Instalation, setup and first results. Glasgow, UK, 1–5 May 2000.
- Roth, P.; Georgiev, A.; Boudinov, H. Design and construction of a system for sun-tracking. Renewable Energy 2004, 29, 393–402. [Google Scholar] [CrossRef]
- Lee, C.D.; Yeh, H.Y.; Chen, M.H.; Sue, X.L.; Tzeng, Y.C. HCPV sun tracking study at INER. In Proceeding of the 2006 IEEE 4th World Conference on Photovoltaic Energy ConversionWaikoloa, HI, USA, 7–12 May 2006; pp. 718–720.
- Morse, A.S. Control using logic-based switching. In Trends in Control; Isidori, A, Ed.; Springer: New York, NY, USA, 1995; pp. 69–113. [Google Scholar]
- Hespanha, J.P.; Liberzonb, D.; Morse, A.S. Overcoming the limitations of adaptive control by means of logic-based switching. Syst. Control Lett. 2003, 49, 49–65. [Google Scholar] [CrossRef]
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Yeh, H.-Y.; Lee, C.-D. The Logic-Based Supervisor Control for Sun-Tracking System of 1 MW HCPV Demo Plant: Study Case. Appl. Sci. 2012, 2, 100-113. https://doi.org/10.3390/app2010100
Yeh H-Y, Lee C-D. The Logic-Based Supervisor Control for Sun-Tracking System of 1 MW HCPV Demo Plant: Study Case. Applied Sciences. 2012; 2(1):100-113. https://doi.org/10.3390/app2010100
Chicago/Turabian StyleYeh, Hong-Yih, and Cheng-Dar Lee. 2012. "The Logic-Based Supervisor Control for Sun-Tracking System of 1 MW HCPV Demo Plant: Study Case" Applied Sciences 2, no. 1: 100-113. https://doi.org/10.3390/app2010100
APA StyleYeh, H. -Y., & Lee, C. -D. (2012). The Logic-Based Supervisor Control for Sun-Tracking System of 1 MW HCPV Demo Plant: Study Case. Applied Sciences, 2(1), 100-113. https://doi.org/10.3390/app2010100