
A Pretreatment Method for the Velocity of DVL Based on the Motion Constraint for the Integrated SINS/DVL

Abstract
:1. Introduction
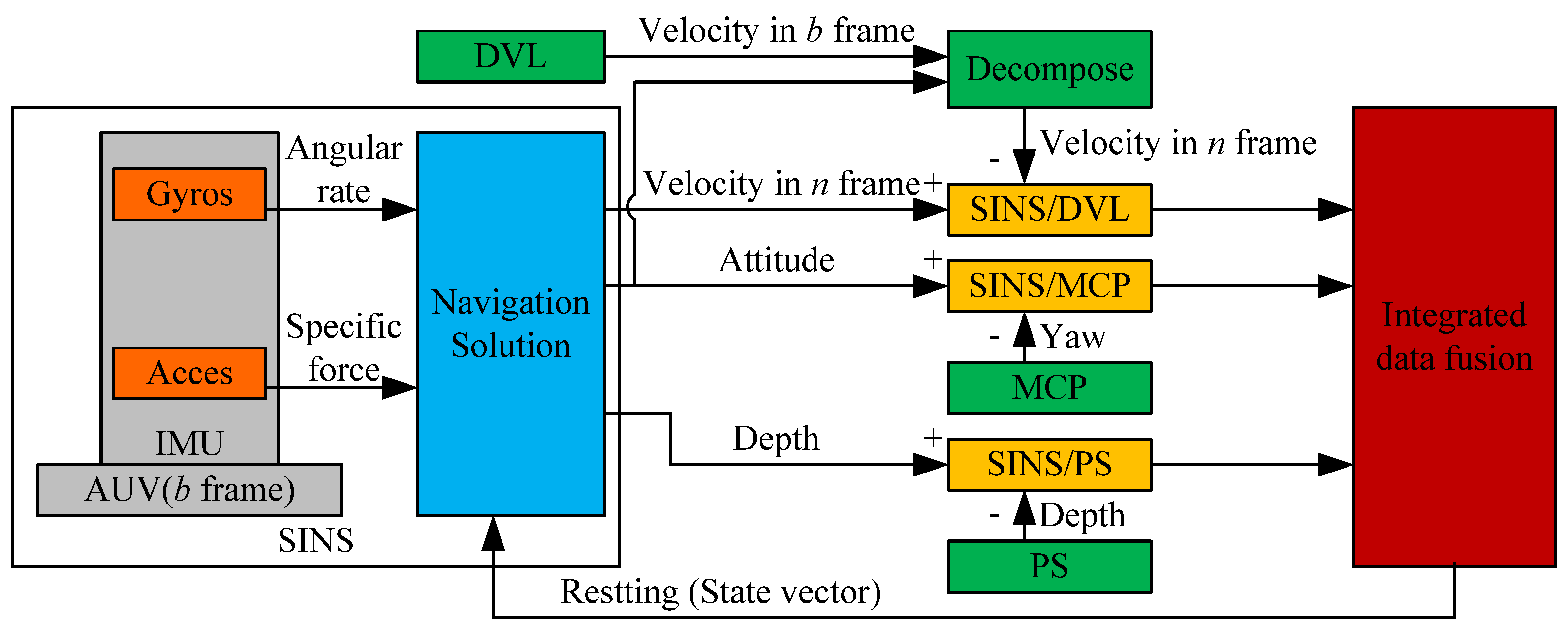
2. Integrated Navigation System of SINS/DVL/MCP/PS
2.1. Error Propagation Model of SINS
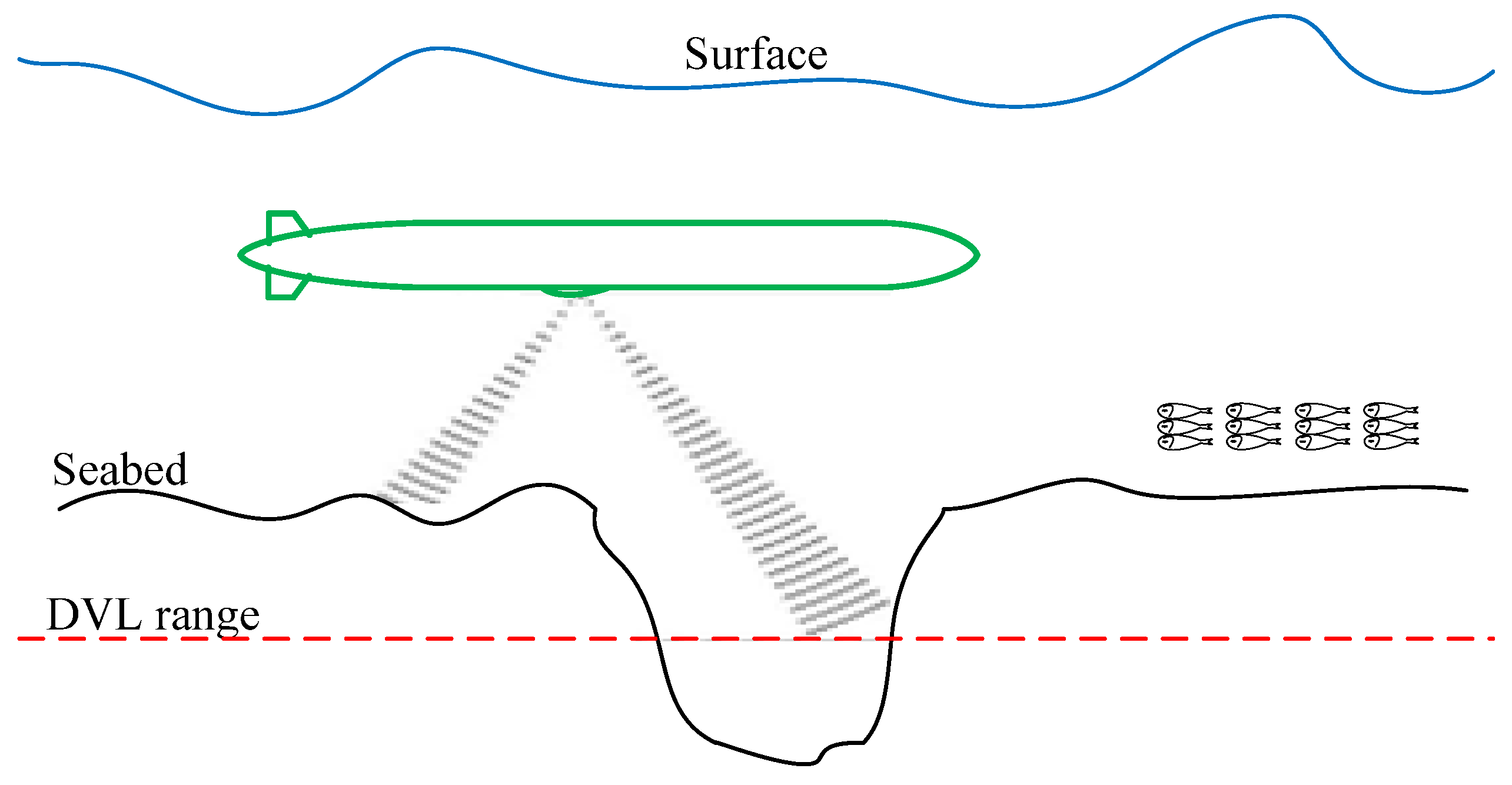
2.2. Error Propagation Model of DVL
2.3. Error Propagation Models of MCP and PS
3. Data Fusion in the Integration of SINS/DVL/MCP/PS
3.1. Data Fusion with the Subsystems
3.1.1. Standard Kalman Filter
3.1.2. System and Measurement Equations of SINS/DVL
3.1.3. System and Measurement Equations of SINS/MCP and SINS/PS
3.2. Data Fusion of SINS/DVL/MCP/PS
4. Velocity Tracing Method for DVL Based on Motion Constraint
4.1. Analysis of the Relationship between the DVL Error and SINS Navigation Accuracy
4.2. Velocity Tracing Algorithm for DVL Based on AUV Motion Constraints
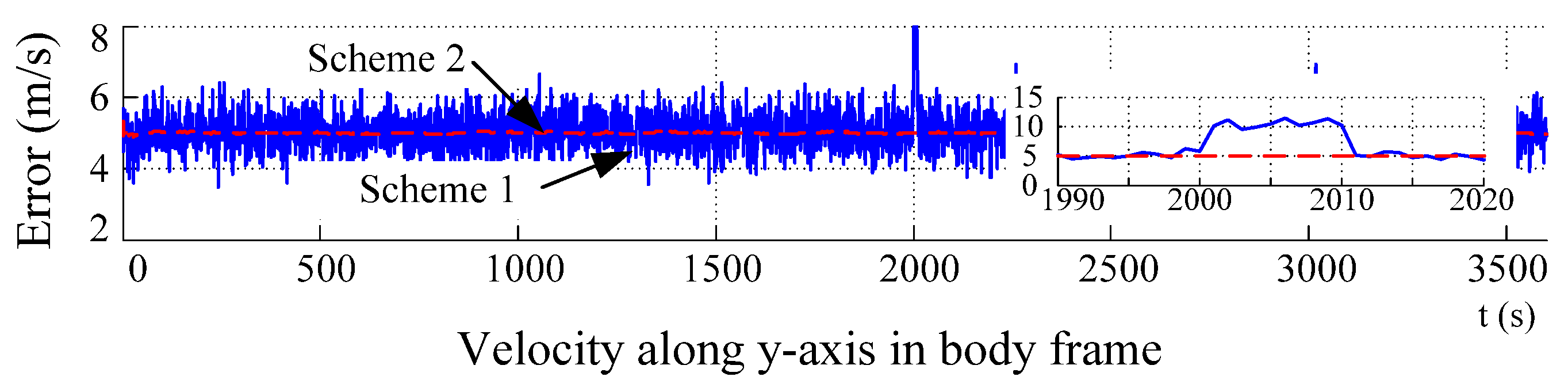
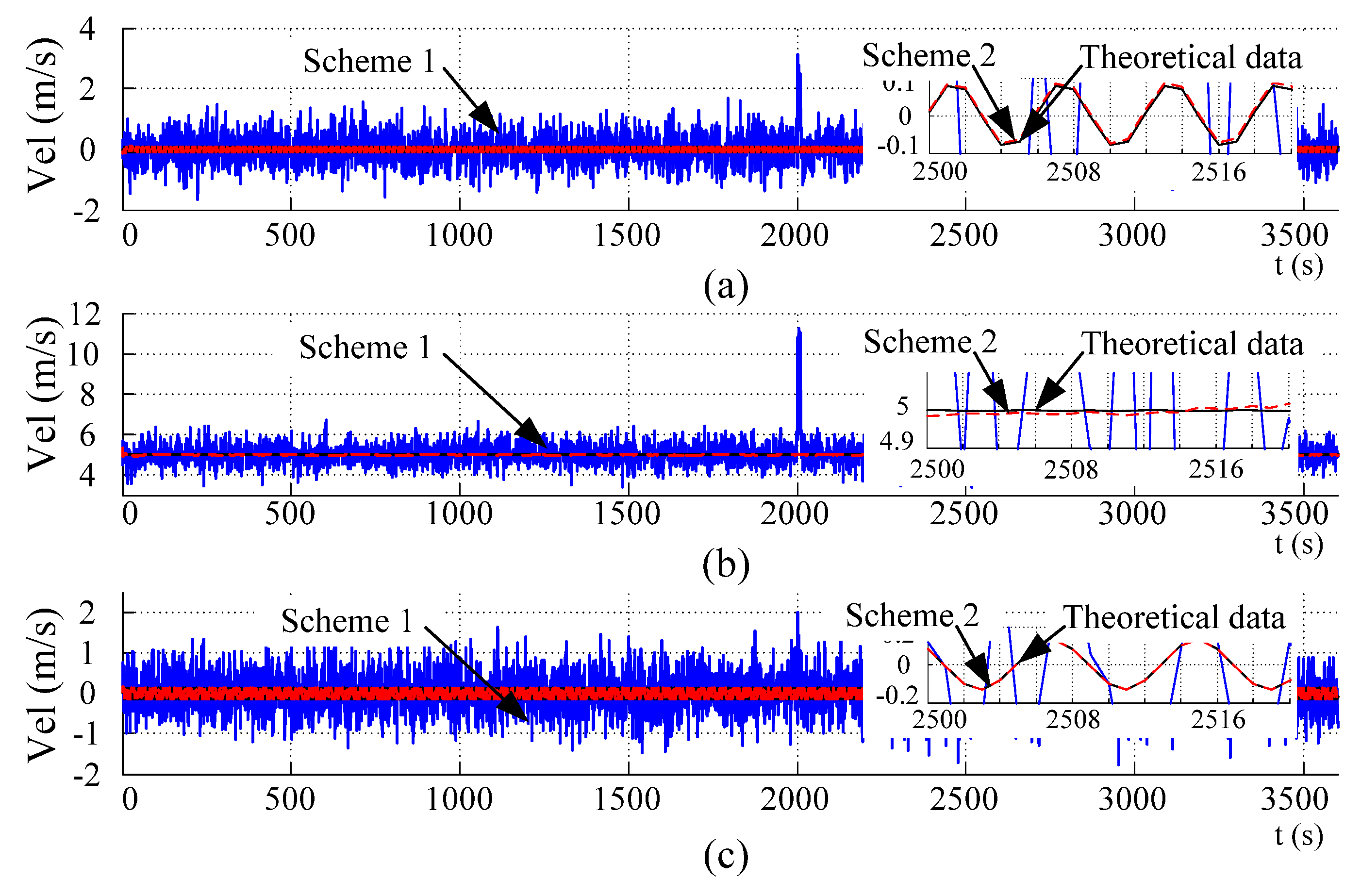
5. Simulations
5.1. Simulation Setting
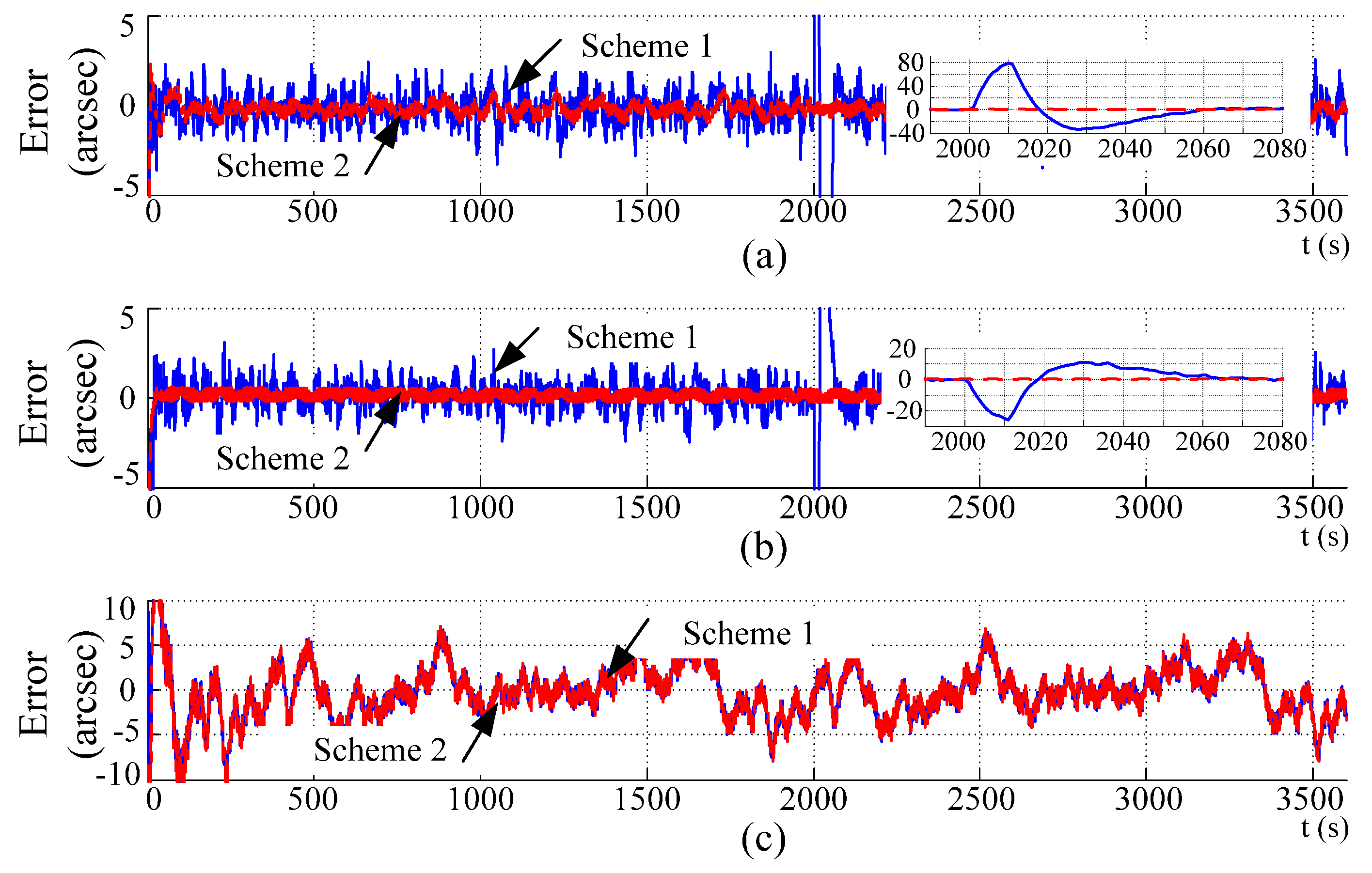
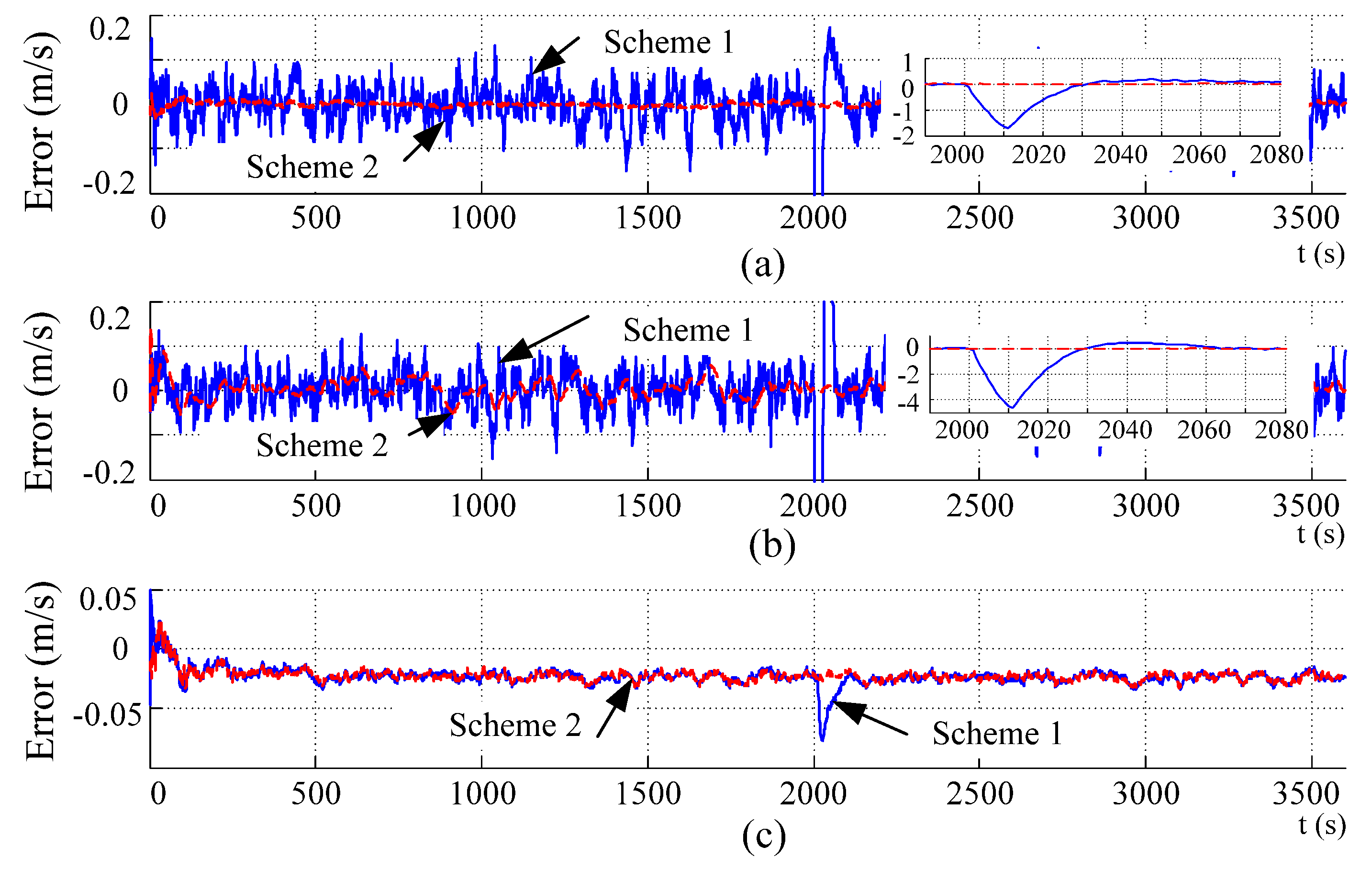
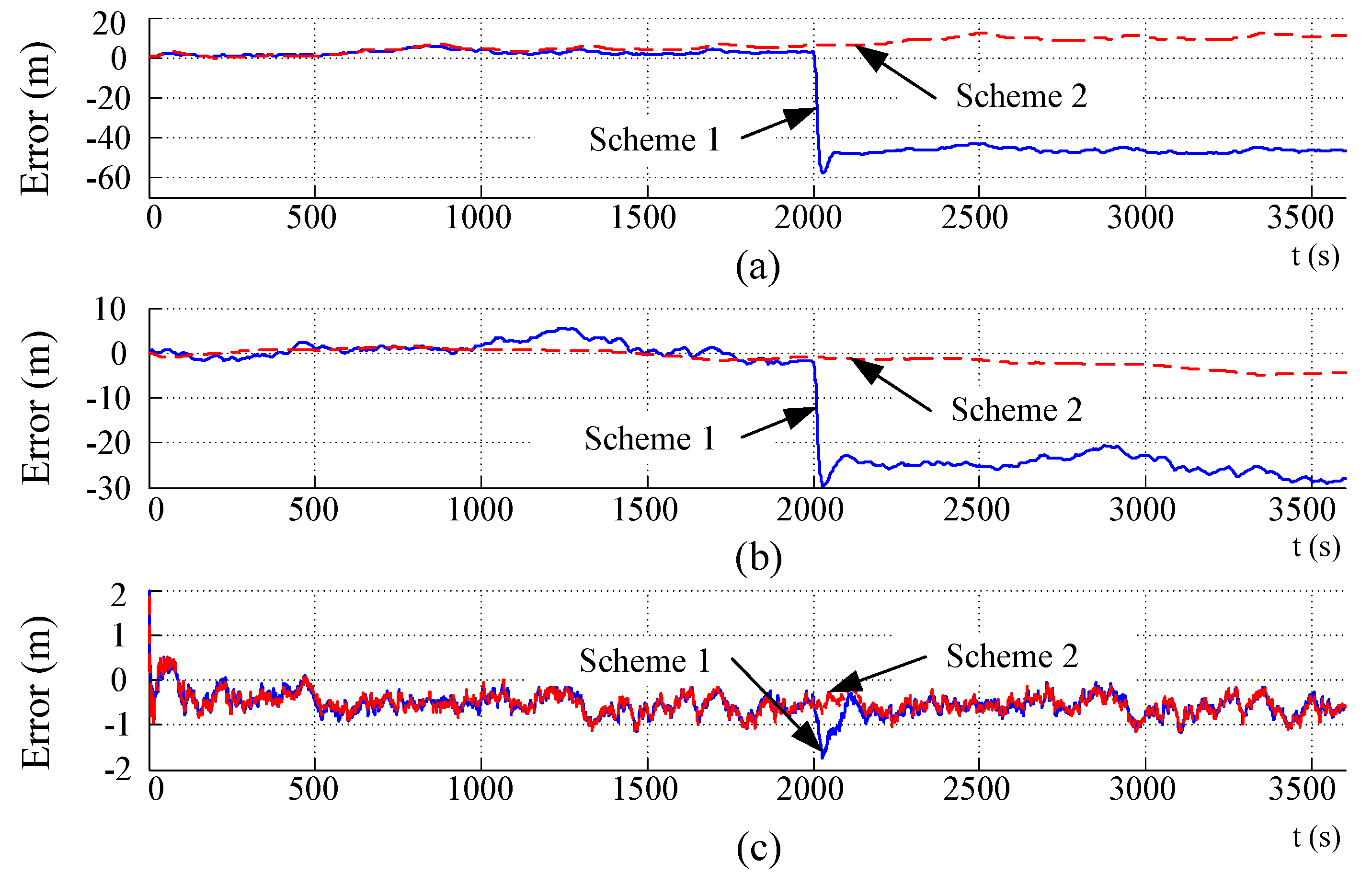
5.2. Simulation Results and Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV navigation and localization: A review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Brown, H.; Kim, A.; Eustice, R.M. An overview of autonomous underwater vehicle research and testbed at PeRL. Mar. Technol. Soc. J. 2009, 43, 37–47. [Google Scholar] [CrossRef]
- Stutters, L.; Liu, H.; Tiltman, C.; Brown, D.J. Navigation technologies for autonomous underwater vehicles. IEEE Trans. Syst. Man Cybern. 2008, 38, 581–589. [Google Scholar] [CrossRef]
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology, 2nd ed.; Lavenham Press Ltd.: London, UK, 2004; pp. 263–274. [Google Scholar]
- Jalving, B.; Gade, K.; Hagen, O.K. A toolbox of aiding techniques for the HUGIN AUV integrated inertial navigation system. Model. Identif. Control 2004, 25, 173–190. [Google Scholar] [CrossRef]
- Jalving, B.; Gade, K.; Hagen, O.K. DVL velocity aiding in the HUGIN 1000 integrated inertial navigation system. Model. Identif. Control 2004, 25, 223–235. [Google Scholar] [CrossRef]
- Lee, P.M.; Jun, B.H. Pseudo long base line navigation algorithm for underwater vehicles with inertial sensors and two acoustic range measurements. Ocean Eng. 2007, 34, 416–425. [Google Scholar] [CrossRef]
- Lee, P.M.; Jun, B.H.; Kim, K.; Lee, J.; Aoki, T.; Hyakudome, T. Simulation of an inertial acoustic navigation system with range aiding for an autonomous underwater vehicle. IEEE J. Ocean Eng. 2007, 32, 327–345. [Google Scholar] [CrossRef]
- Geng, Y.R.; Martins, R.; Sousa, J. Accuracy analysis of DVL/IMU/Magnetometer integrated navigation system using different IMUs in AUV. In Proceedings of the 2010 8th IEEE International Conference on Control and Automation, Xiamen, China, 9–11 June 2010; pp. 516–512.
- Lv, Z.P.; Tang, K.H.; Wu, M.P. Online estimation of DVL misalignment angle in SINS/DVL integrated navigation system. In Proceedings of the Tenth International Conference on Electronic Measurement & Instruments, Chengdu, China, 16–19 August 2011; pp. 336–339.
- Kinsey, J.C.; Whitcomb, L.L. In situ alignment calibration of attitude and doppler sensors for precision underwater vehicle navigation: Theory and experiment. IEEE J. Ocean Eng. 2007, 32, 286–299. [Google Scholar] [CrossRef]
- Liu, X.; Xu, X.; Liu, Y.; Wang, L. Kalman filter for cross-noise in the integration of SINS and DVL. Math. Probl. Eng. 2014, 2014. [Google Scholar] [CrossRef]
- Ben, Y.Y.; Zhu, Z.J.; Li, Q.; Wu, X. Aided fine alignment for marine SINS. In Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; pp. 1630–1635.
- Li, W.; Wang, J.; Lu, L.; Wu, W. A novel scheme for DVL-aided SINS in-motion alignment using UKF techniques. Sensors 2013, 13, 1046–1063. [Google Scholar] [CrossRef] [PubMed]
- Tang, K.H.; Wang, J.L.; Li, W.L.; Wu, W.Q. A novel INS and Doppler sensors calibration method for long range underwater vehicle navigation. Sensor 2013, 13, 14583–14600. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Li, P.; Liu, J. A fault-tolerant filtering algorithm for SINS/DVL/MCP integrated navigation system. Math. Probl. Eng. 2015, 2015. [Google Scholar] [CrossRef]
- Øyvind, H.; Oddvar, H. Model-aided INS with sea current estimation for robust underwater navigation. IEEE Ocean. Eng. 2011, 36, 316–337. [Google Scholar]
- Xu, W.M.; Liu, Y.C. Algorithm of multi-rate integrating multiple model for underwater target tracking. J. Electron. Inf. Technol. 2008, 30, 581–584. [Google Scholar] [CrossRef]
- Xu, W.M.; Liu, Y.C.; Yin, X.D. Method for underwater target tracking based on integrating multiple model. Geomat. Inf. Sci. Wuhan Univ. 2007, 32, 782–785. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Axes | Gyro Bias (°/h) | Acce Bias (ug) | ||
|---|---|---|---|---|
| Constant | Random (White Noise) | Constant | Random (White Noise) | |
| x-axis | 0.01 | 0.01 | 50 | 50 |
| y-axis | 0.01 | 0.01 | 50 | 50 |
| z-axis | 0.01 | 0.01 | 50 | 50 |
| Parameters | Pitch | Roll | Yaw |
|---|---|---|---|
| Amplitude (°) | 1.5 | 1.5 | 1.0 |
| Cycle (s) | 8 | 7.5 | 6 |
| Initial Phase (°) | 0 | 0 | 0 |
| Swinging center (°) | 0 | 0 | 0 |
| Statistical Items | Velocity along the y-axis | East Velocity | North Velocity | Upward Velocity | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sch. 1 | Sch. 2 | Ideal | Sch. 1 | Sch. 2 | Ideal | Sch. 1 | Sch. 2 | Ideal | Sch. 1 | Sch. 2 | Ideal | |
| Mean | 5.0002 | 5.0033 | 5 | 0.0005 | 0 | 0 | 5.0009 | 5.0005 | 5.0008 | 0.0004 | 0 | 0 |
| Std | 0.4975 | 0.0220 | 0 | 0.4996 | 0.0617 | 0.0618 | 0.5001 | 0.0020 | 0.0220 | 0.5153 | 0.0926 | 0.0925 |
| Statistical Items | Pitch | Roll | Yaw | East Velocity | East Velocity | East Velocity | Height | |
|---|---|---|---|---|---|---|---|---|
| Scheme 1 | Mean | −0.2208 | 0.0935 | −0.3450 | 0 | 0.0015 | −0.0012 | −0.4873 |
| Std | 1.0416 | 1.0835 | 3.9327 | 0.0406 | 0.0418 | 0.0073 | 0.2589 | |
| Scheme 2 | Mean | −0.2232 | 0.1092 | −0.3507 | 0 | 0.0020 | −0.0015 | −0.4907 |
| Std | 0.6773 | 0.5885 | 4.0719 | 0.0056 | 0.0231 | 0.0061 | 0.2540 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.-Y.; Liu, X.-J.; Wang, L.; Zhu, Y.-H.; Liu, X.-X. A Pretreatment Method for the Velocity of DVL Based on the Motion Constraint for the Integrated SINS/DVL. Appl. Sci. 2016, 6, 79. https://doi.org/10.3390/app6030079
Zhao L-Y, Liu X-J, Wang L, Zhu Y-H, Liu X-X. A Pretreatment Method for the Velocity of DVL Based on the Motion Constraint for the Integrated SINS/DVL. Applied Sciences. 2016; 6(3):79. https://doi.org/10.3390/app6030079
Chicago/Turabian StyleZhao, Li-Ye, Xian-Jun Liu, Lei Wang, Yan-Hua Zhu, and Xi-Xiang Liu. 2016. "A Pretreatment Method for the Velocity of DVL Based on the Motion Constraint for the Integrated SINS/DVL" Applied Sciences 6, no. 3: 79. https://doi.org/10.3390/app6030079
APA StyleZhao, L.-Y., Liu, X.-J., Wang, L., Zhu, Y.-H., & Liu, X.-X. (2016). A Pretreatment Method for the Velocity of DVL Based on the Motion Constraint for the Integrated SINS/DVL. Applied Sciences, 6(3), 79. https://doi.org/10.3390/app6030079