A New Online Secondary Path Modeling Method with An Auxiliary Noise Power Scheduling Strategy for Narrowband Active Noise Control Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Existing Online Secondary Path Modeling (SPM) Method for Narrowband Active Noise Control (NANC) Systems
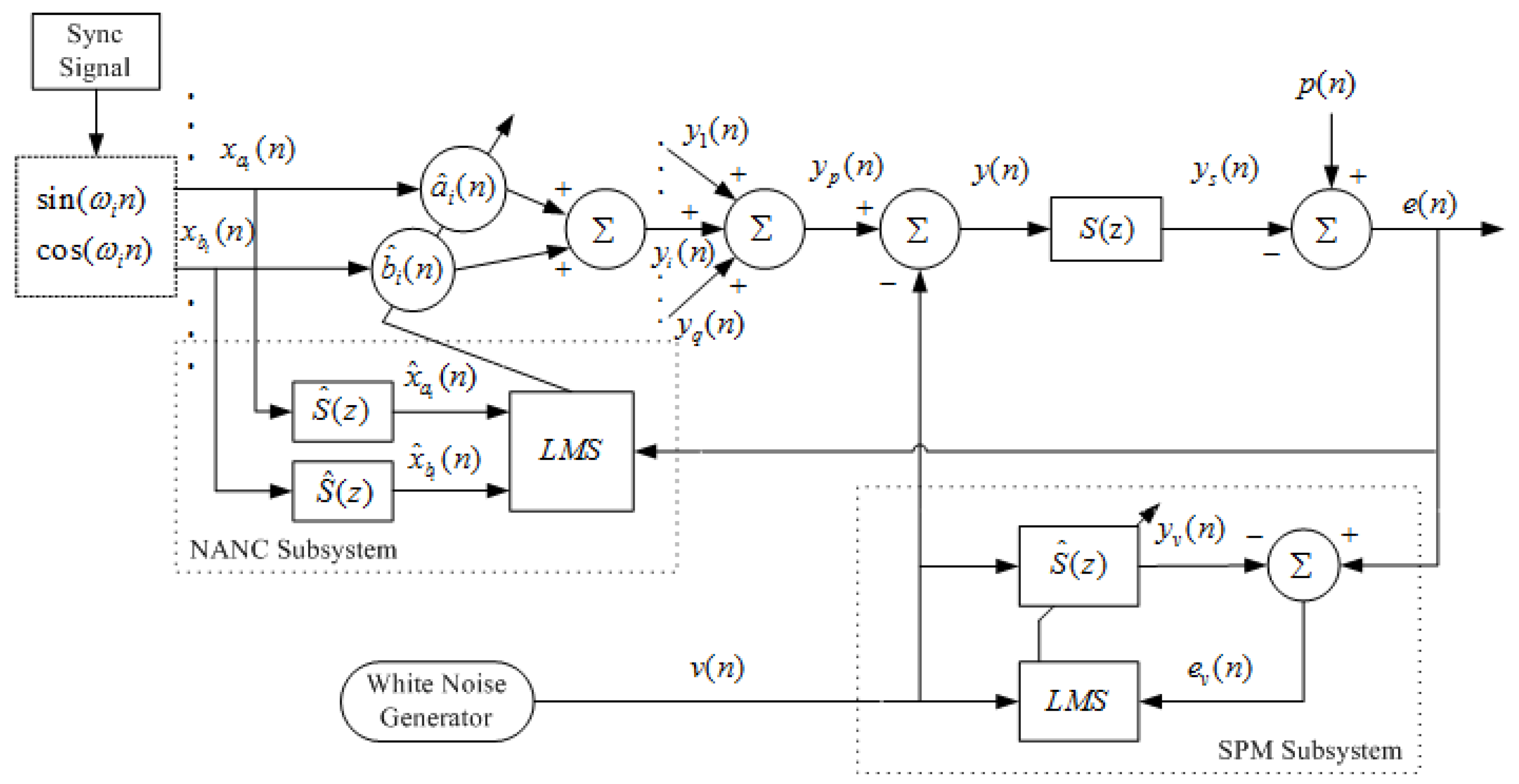
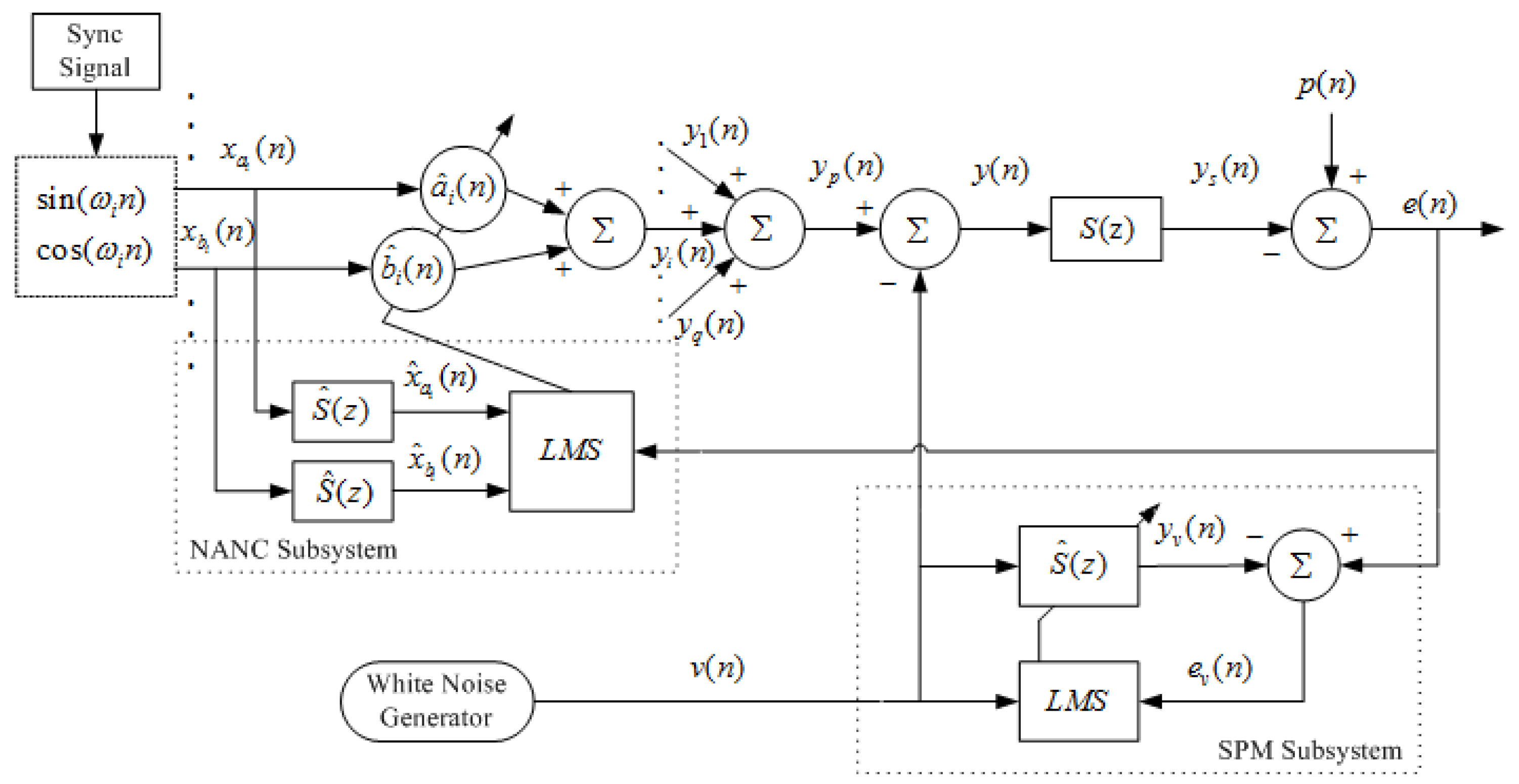
2.1. Basic NANC System with Online SPM
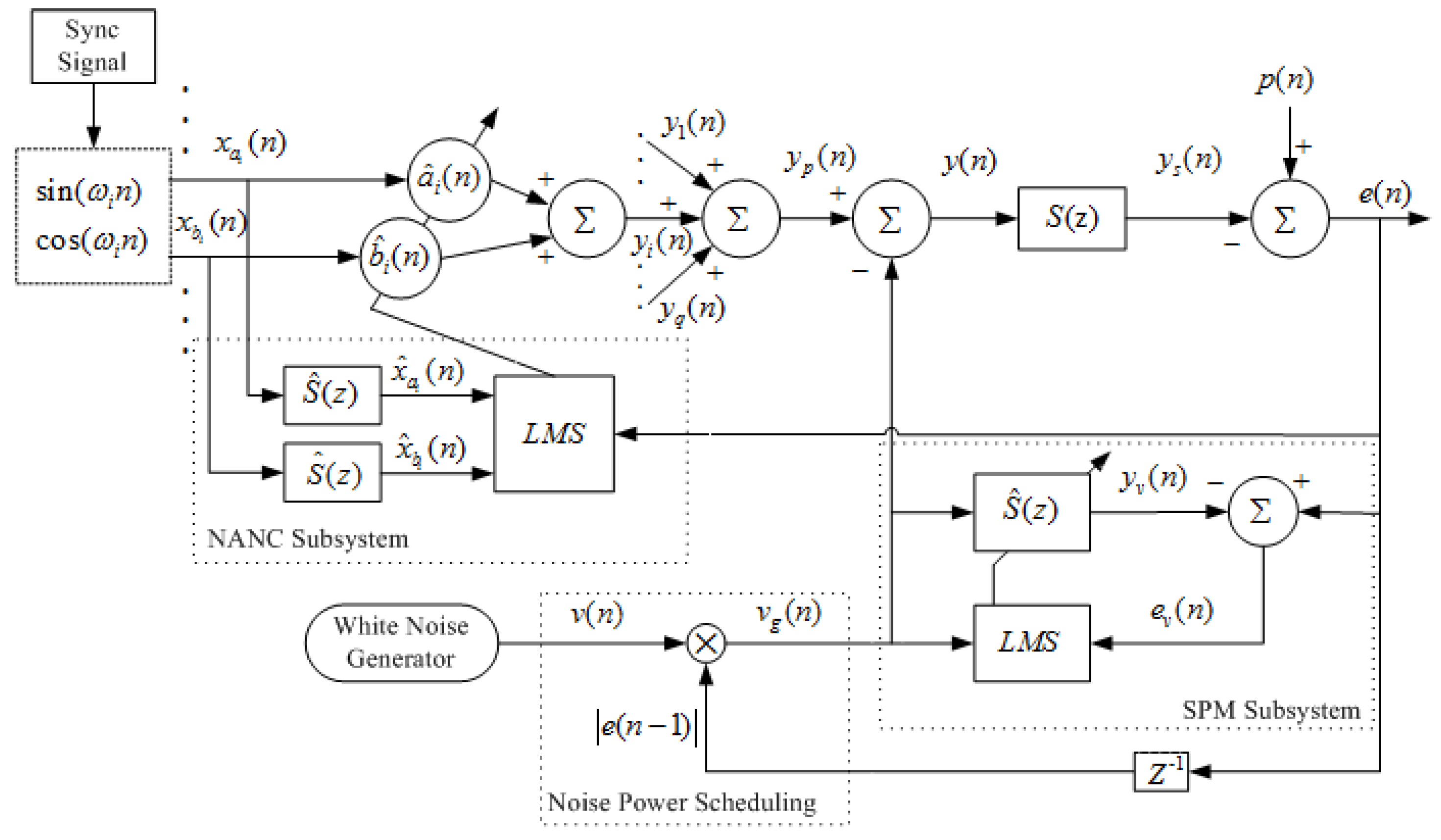
2.2. NANC System with Online SPM Using Scaled Auxiliary Noise Injection
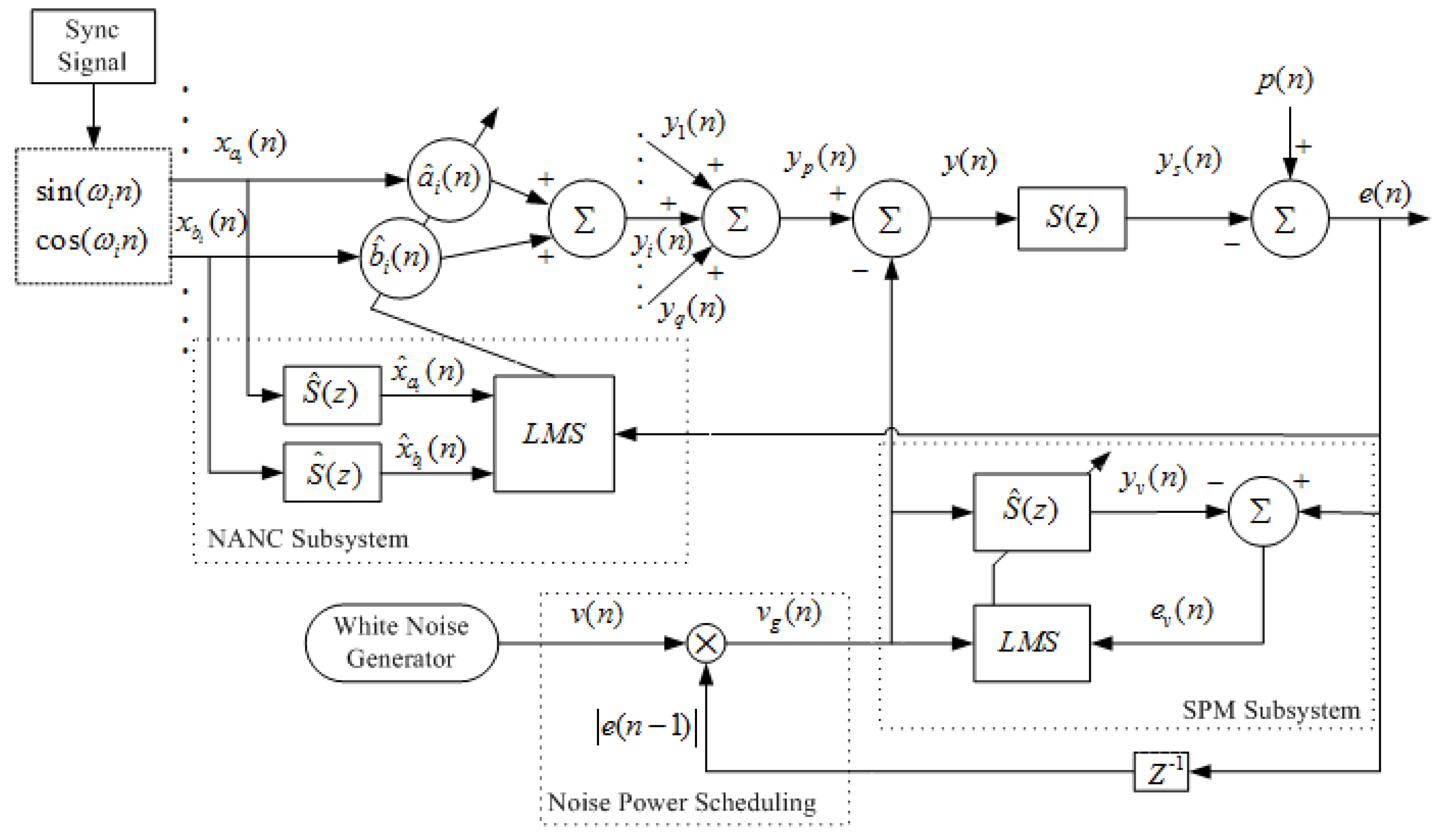
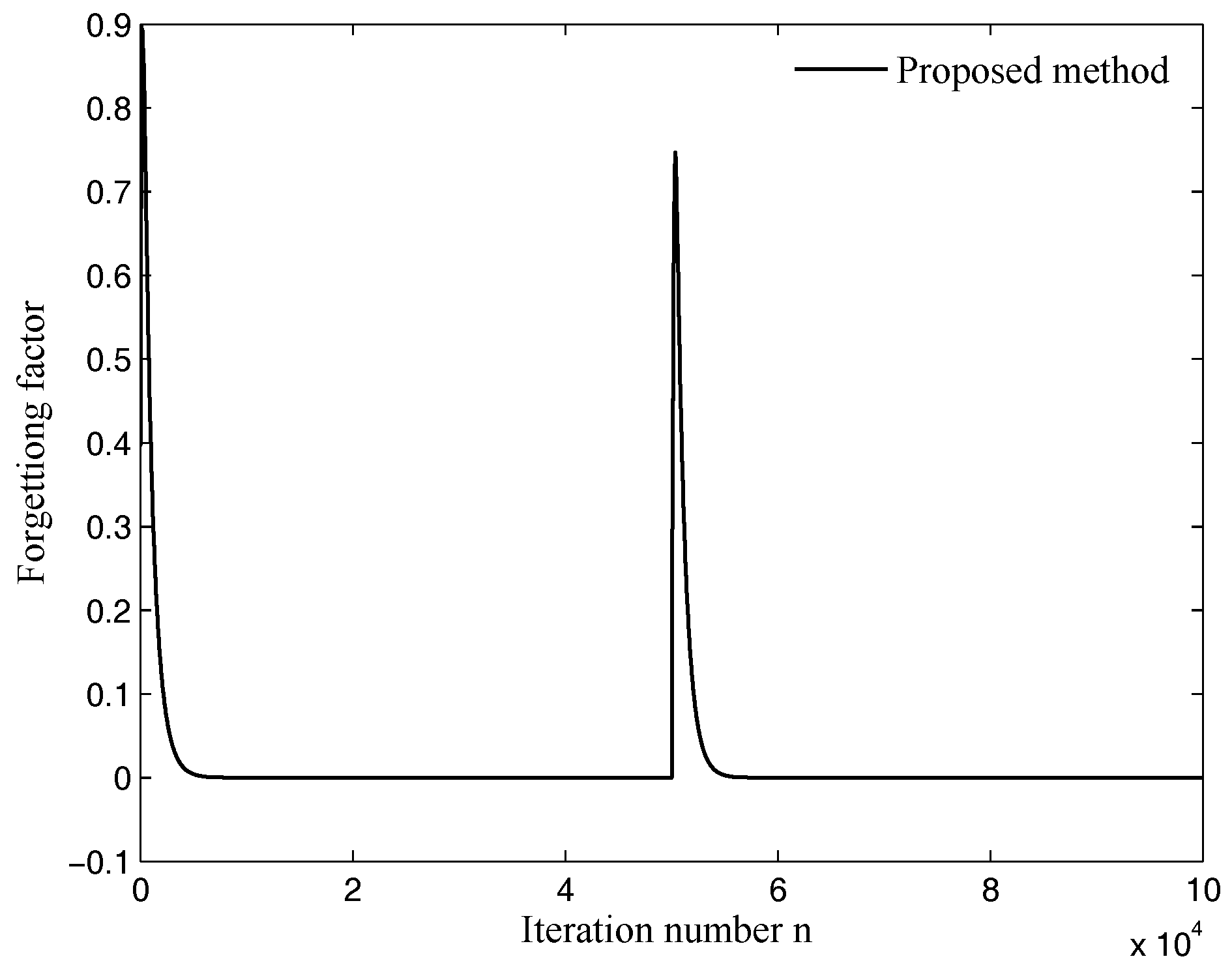
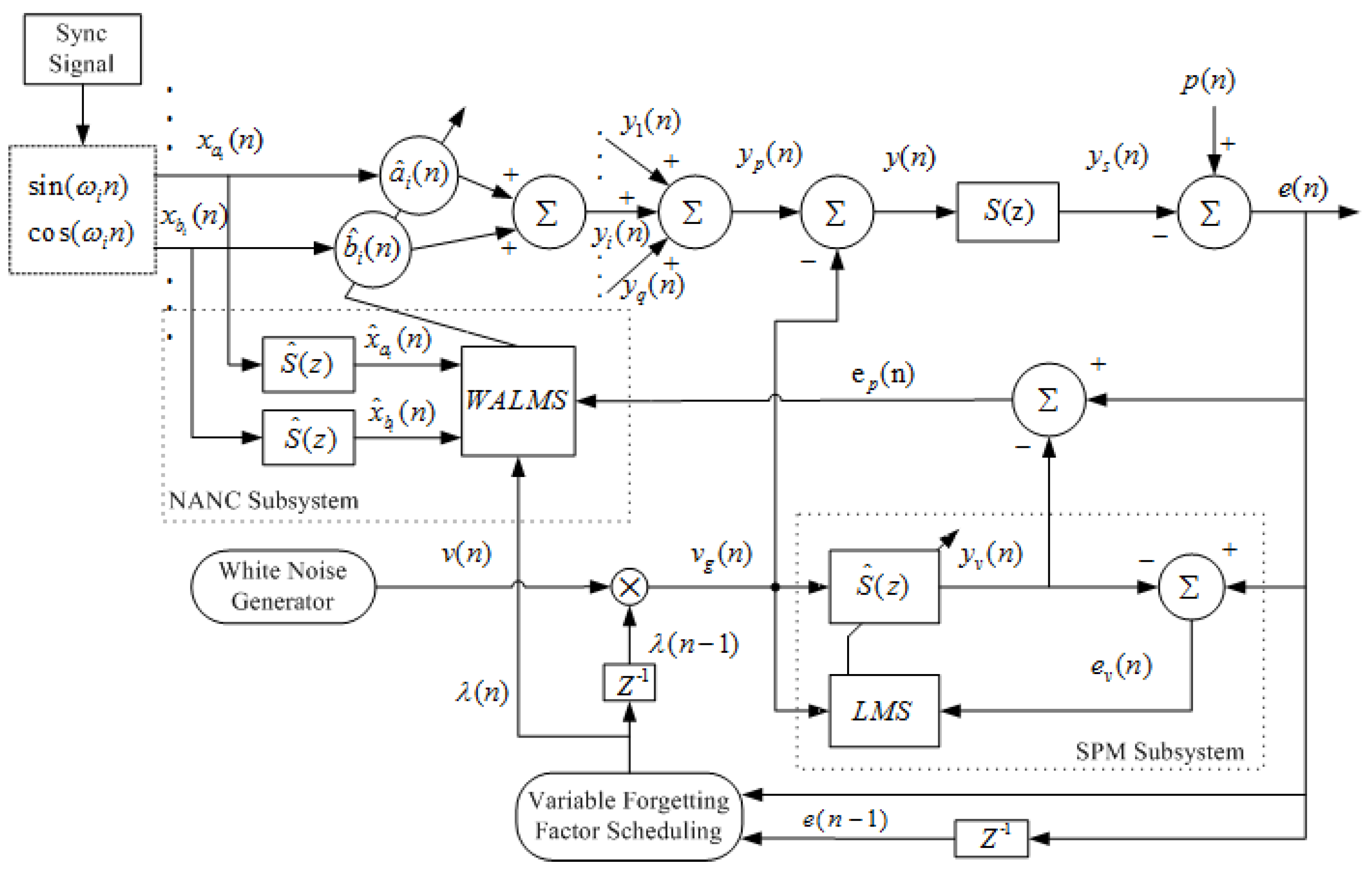
3. Proposed Method
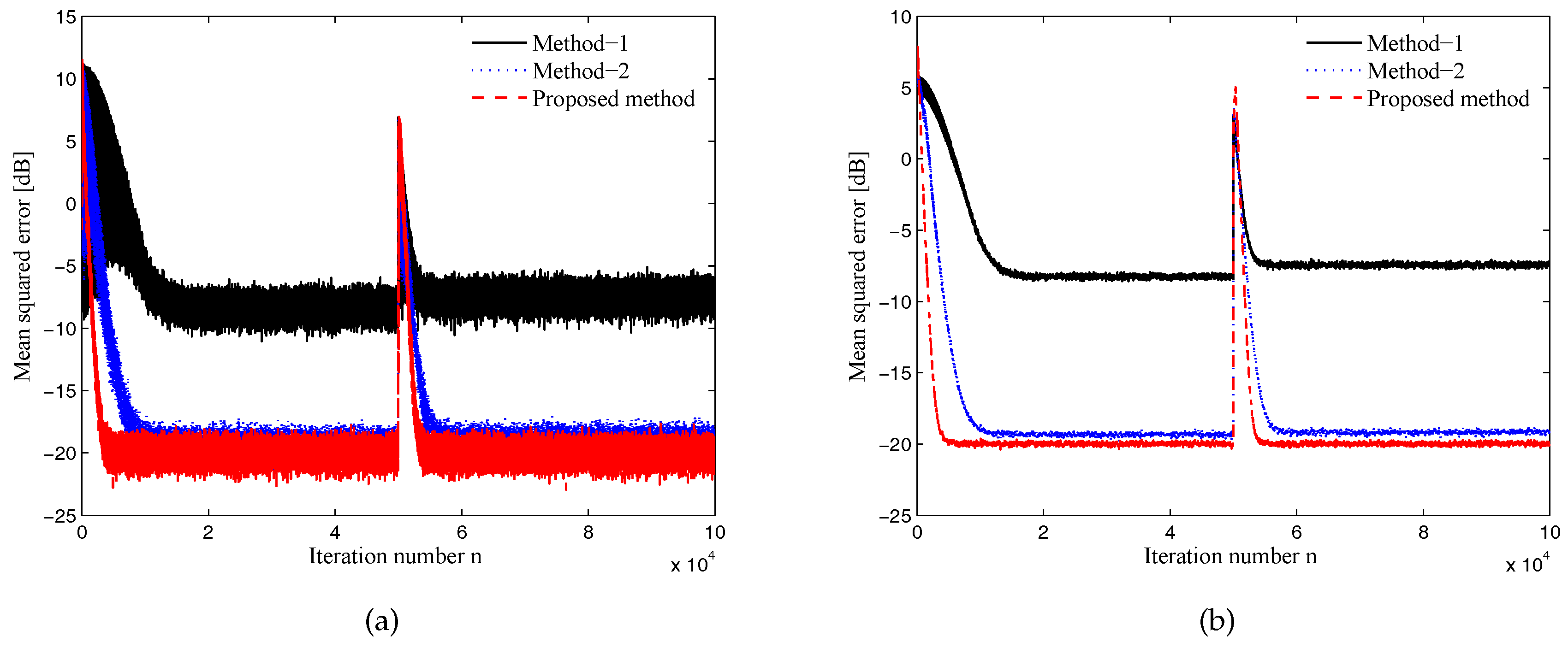
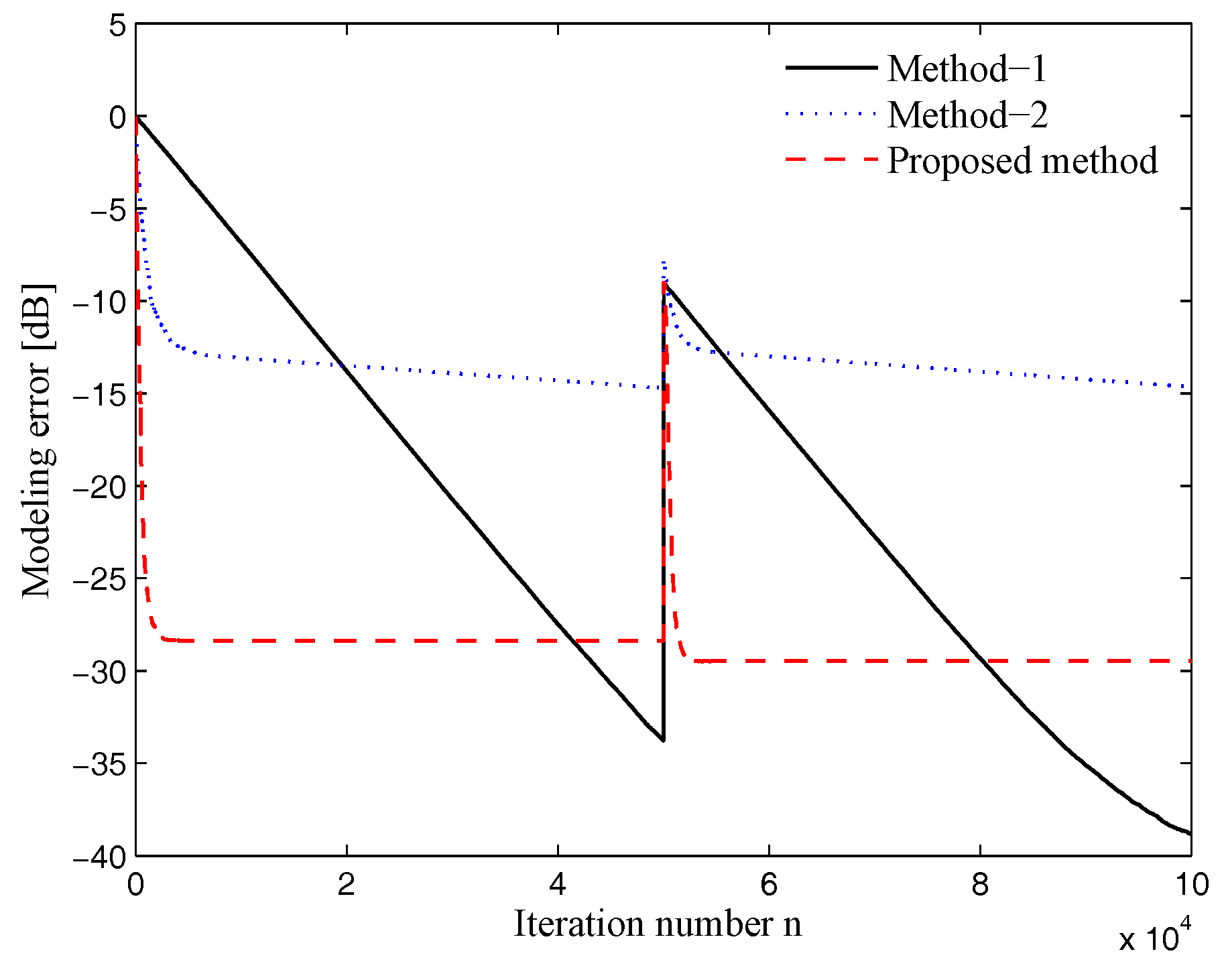
4. Simulations and Results
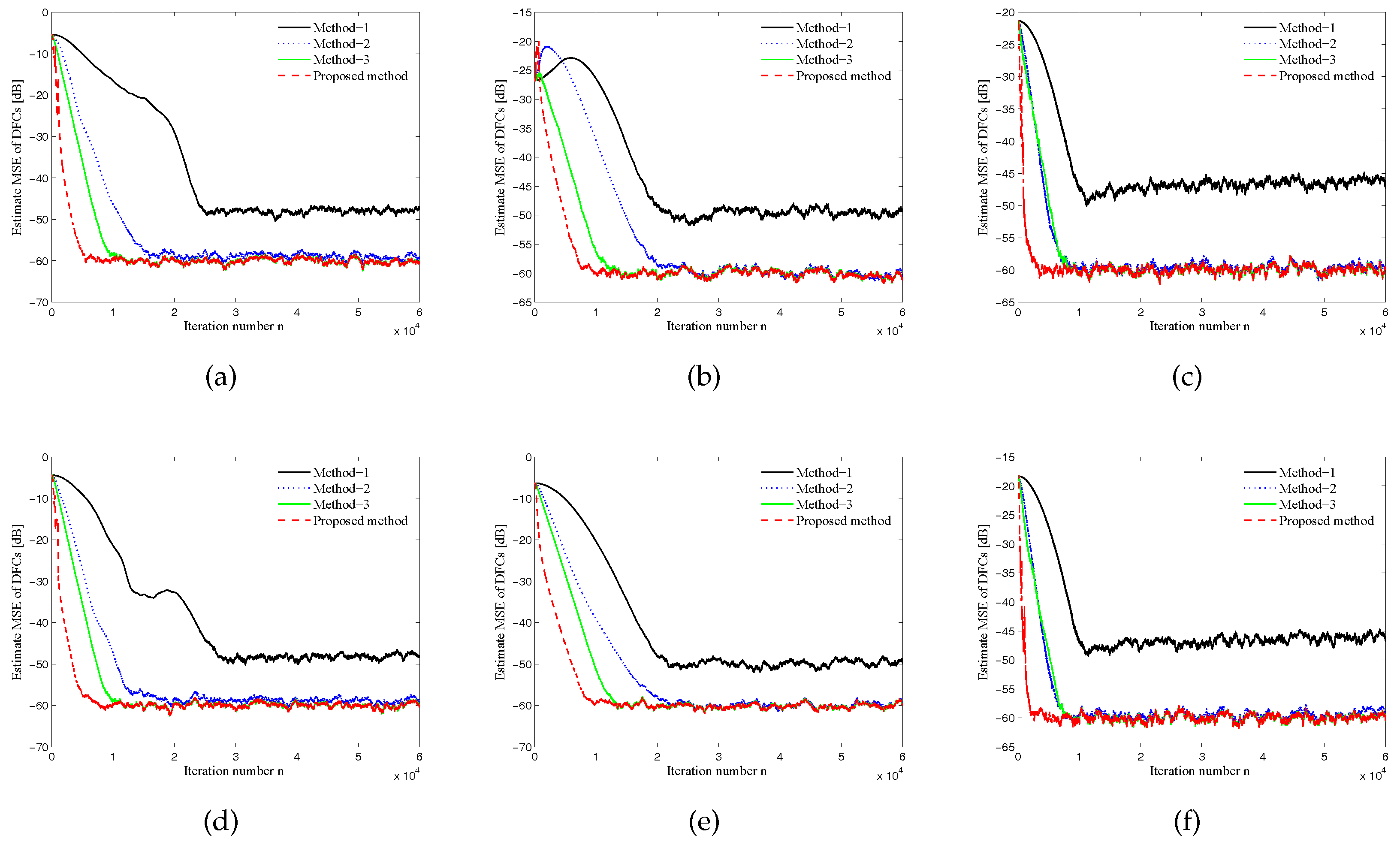
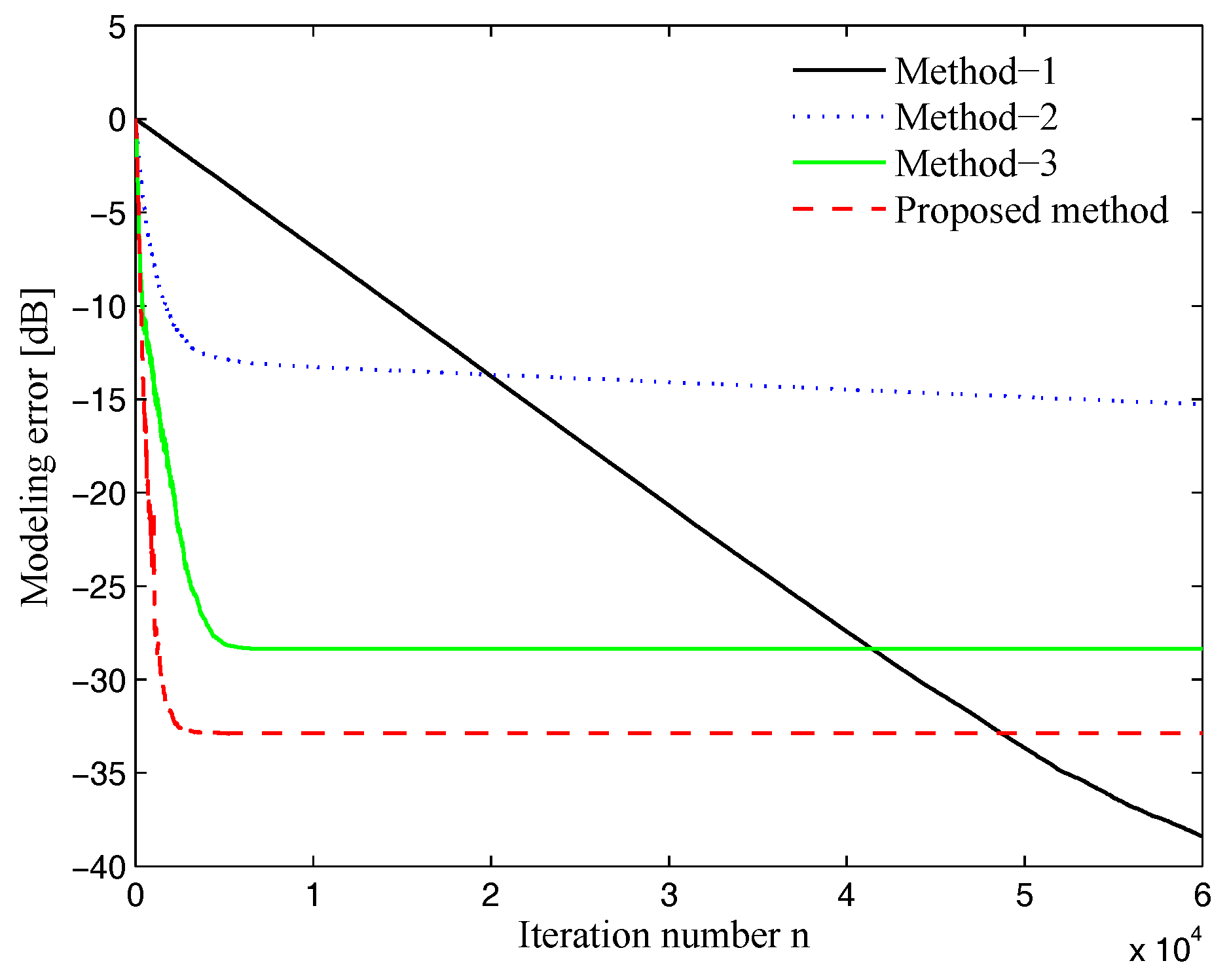
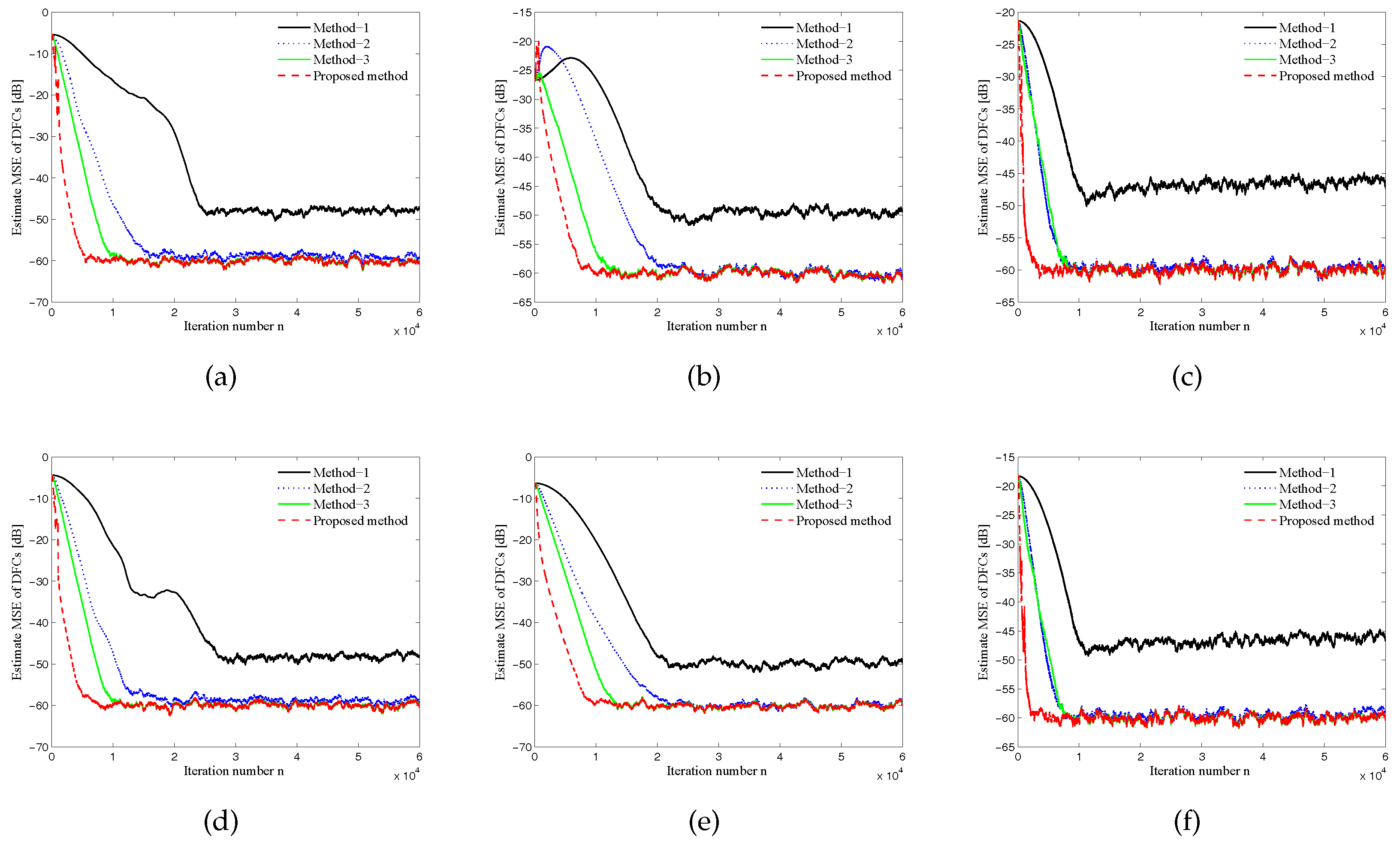
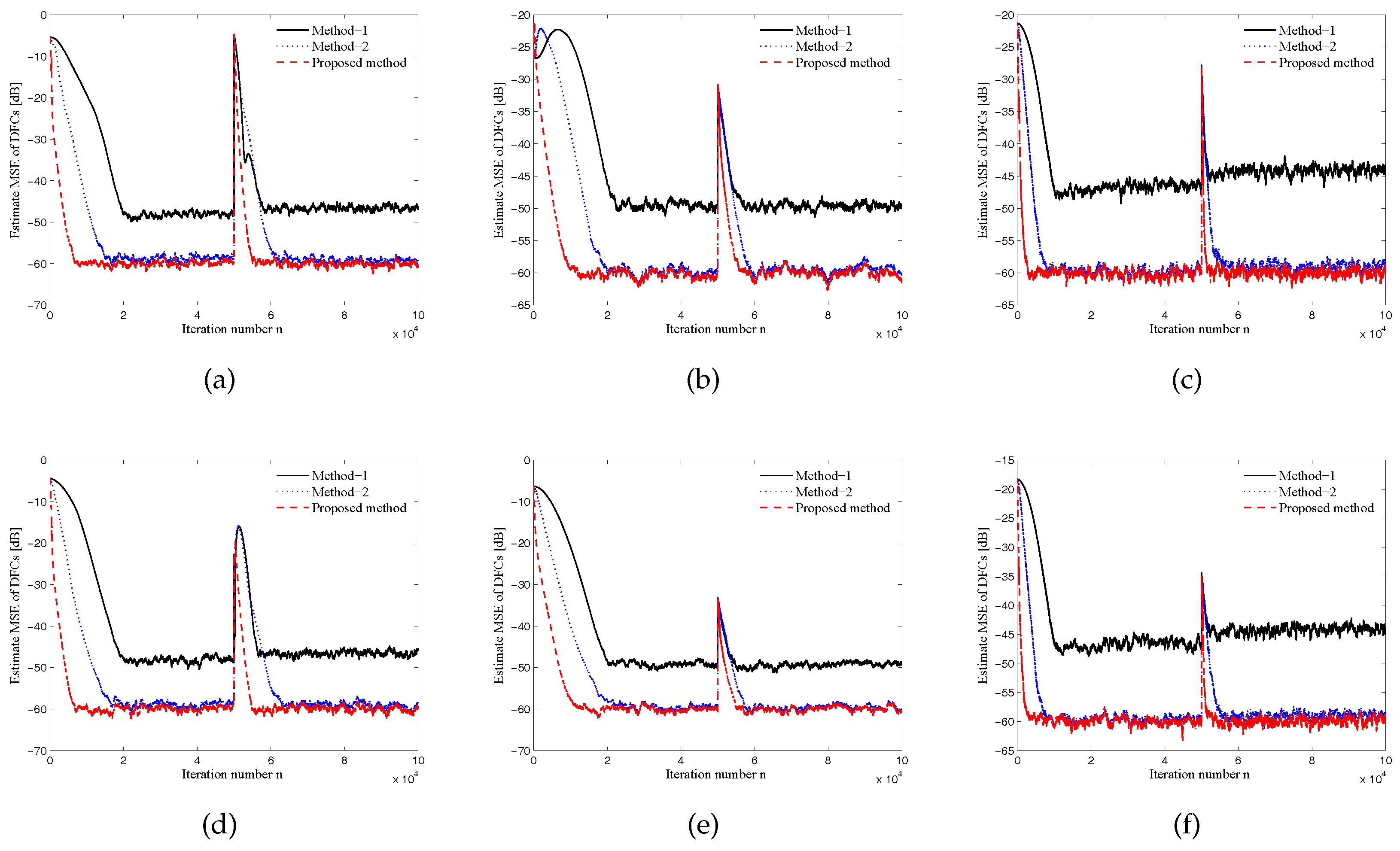
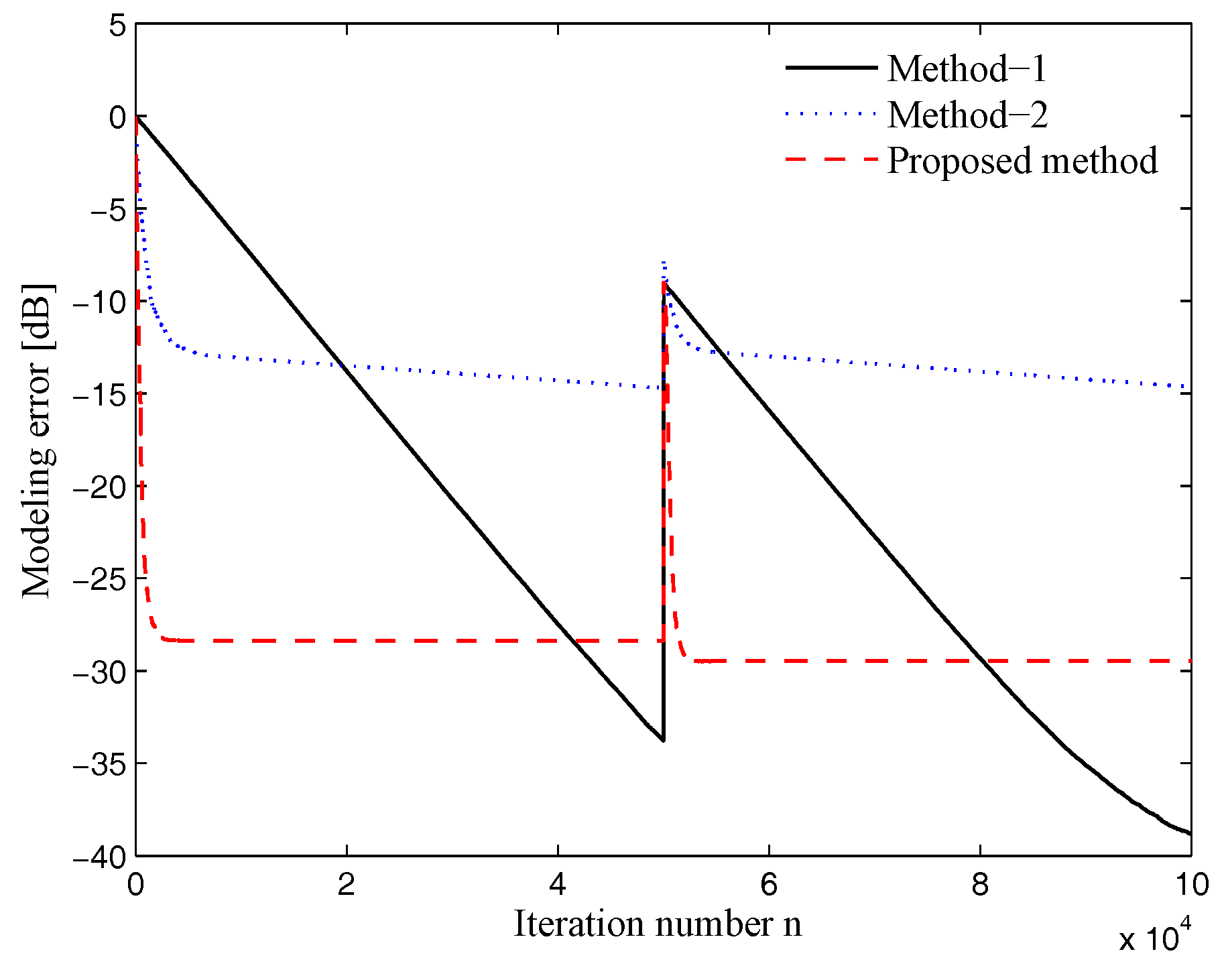
- Relative modeling error of the secondary path, defined as
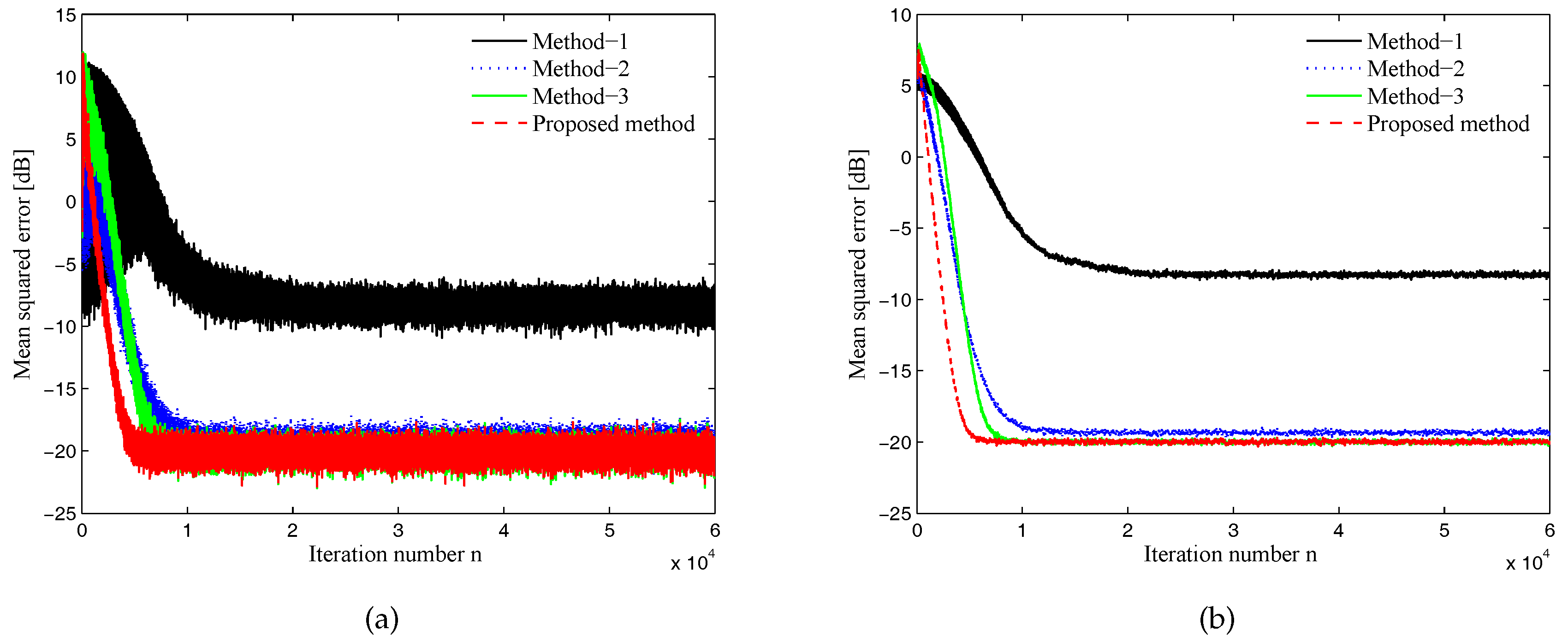
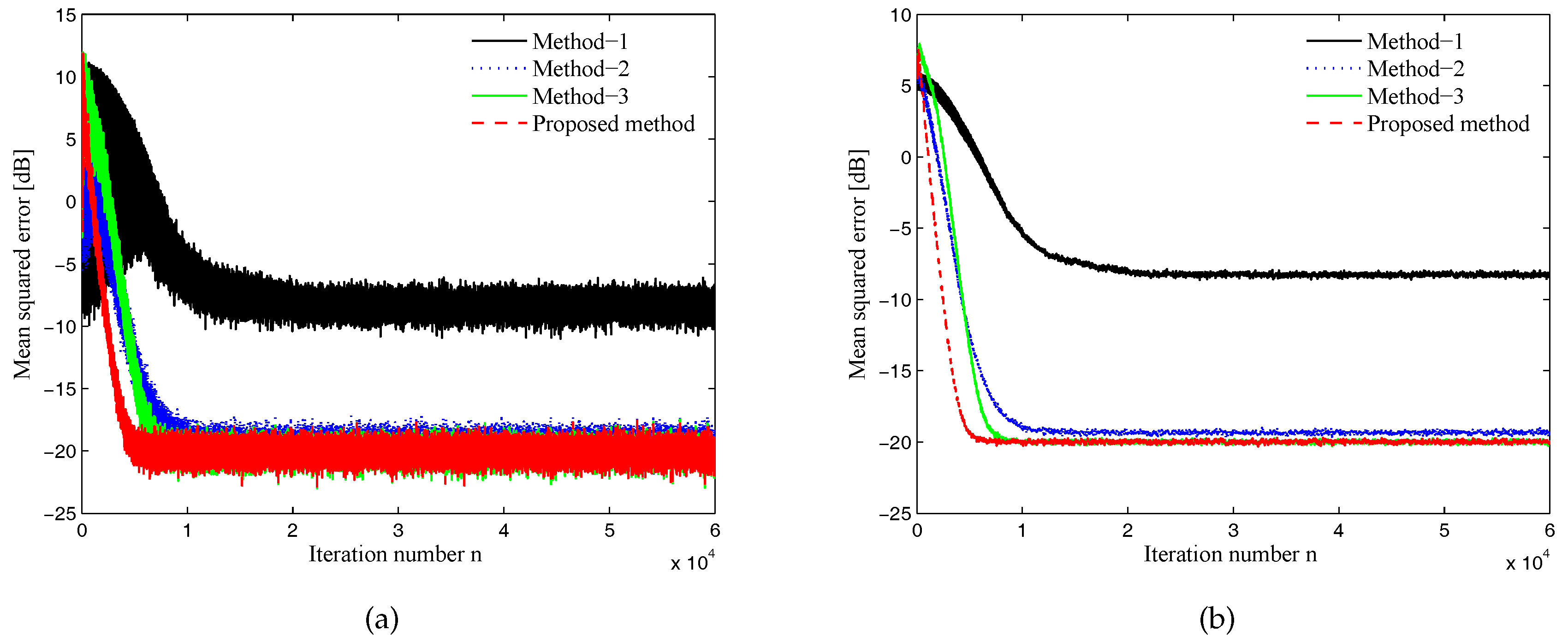
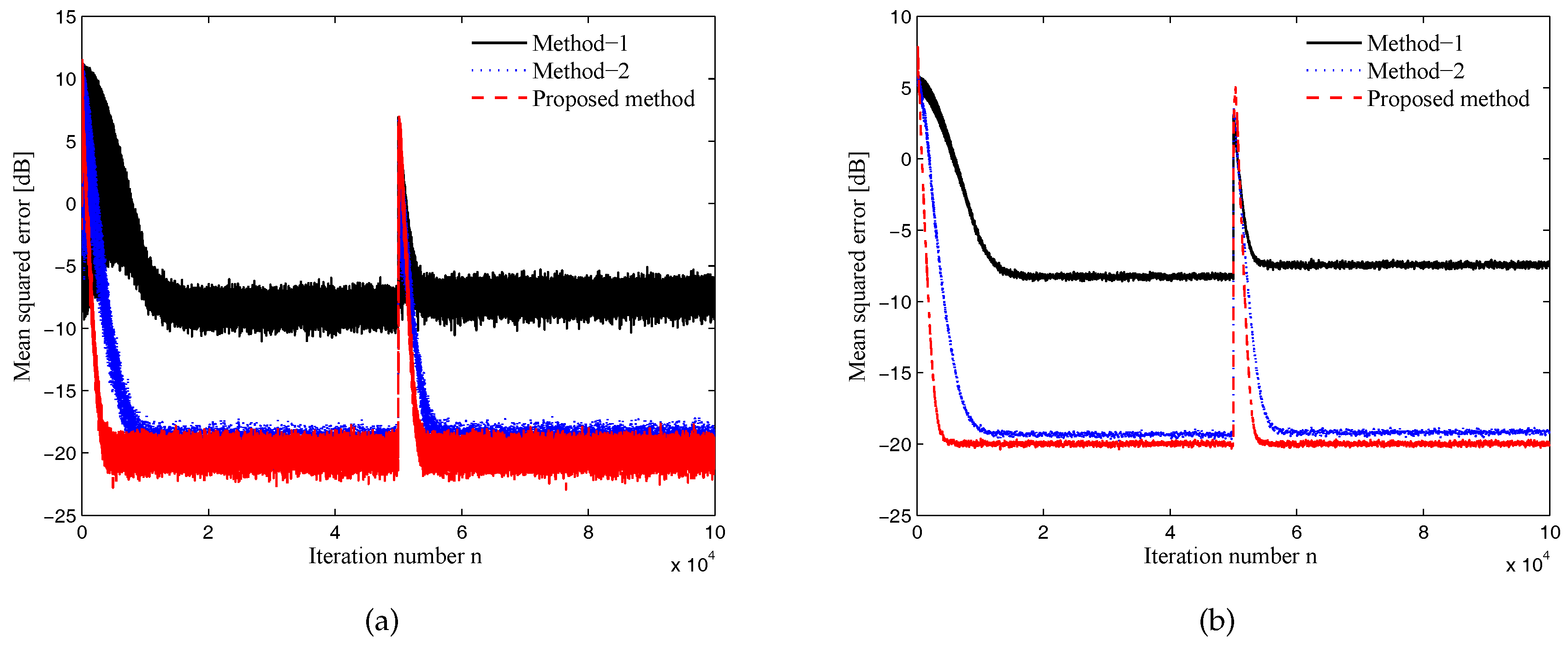
- Mean square error (MSE) at the error microphone, .
4.1. Case 1
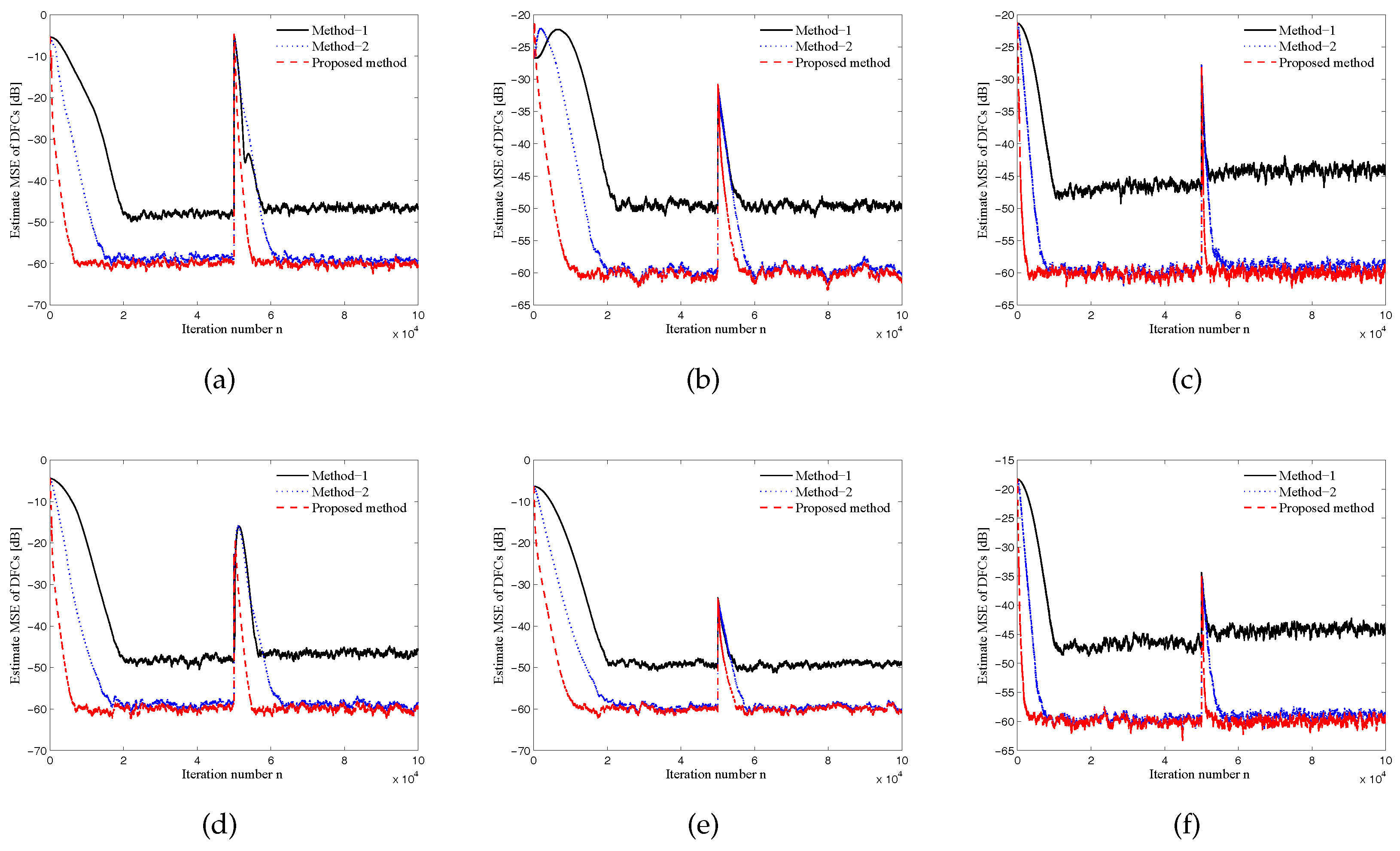
4.2. Case 2
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kajikawa, Y.; Gan, W.S.; Kuo, S.M. Recent advances on active noise control: Open issues and innovative applications. APSIPA Trans. Signal Inf. Process. 2012, 1, 1–21. [Google Scholar] [CrossRef]
- Liu, L.; Kuo, S.M. Wireless communication integrated active noise control system for infant incubators. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Vancouver, BC, Canada, 26–31 May 2013; pp. 375–378. [Google Scholar]
- Veena, S.; Pavithra, S.; Lokesha, H.; Narasimhan, S.; More, N.V. Virtual sensor based Feedback Active Noise Control for neonates in NICU. In Proceedings of the 2013 International Conference on Emerging Trends in Communication, Control, Signal Processing & Computing Applications (C2SPCA), Bangalore, India, 10–11 October 2013; pp. 1–5. [Google Scholar]
- Miyazaki, N.; Yamakawa, K.; Kajikawa, Y. Head-mounted active noise control system to achieve speech communication. In Proceedings of the 2013 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA), Kaohsiung, Taiwan, 29 October–1 November 2013; pp. 1–6. [Google Scholar]
- Jena, D.; Sahoo, S.; Panigrahi, S. Gear fault diagnosis using active noise cancellation and adaptive wavelet transform. Measurement 2014, 47, 356–372. [Google Scholar] [CrossRef]
- Kuo, S.M.; Kuo, K.; Gan, W.S. Active noise control: Open problems and challenges. In Proceedings of the 2010 International Conference on Green Circuits and Systems (ICGCS), Shanghai, China, 21–23 June 2010; pp. 164–169. [Google Scholar]
- Xiao, Y. A new efficient narrowband active noise control system and its performance analysis. IEEE Trans. Audio Speech Lang. Process. 2011, 19, 1865–1874. [Google Scholar] [CrossRef]
- Montazeri, A.; Poshtan, J. A new adaptive recursive RLS-based fast-array IIR filter for active noise and vibration control systems. Signal Process. 2011, 91, 98–113. [Google Scholar] [CrossRef]
- Ferrer, M.; Gonzalez, A.; de Diego, M.; Pinero, G. Convex combination filtered-x algorithms for active noise control systems. IEEE Trans. Audio Speech Lang. Process. 2013, 21, 156–167. [Google Scholar] [CrossRef]
- Li, J.Y.; Kuo, S.M.; Chang, C.Y. Splitting frequency components of error signal in narrowband active noise control system design. In Proceedings of the 2013 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA), Kaohsiung, Taiwan, 29 October–1 November 2013; pp. 1–6. [Google Scholar]
- George, N.V.; Panda, G. Advances in active noise control: A survey, with emphasis on recent nonlinear techniques. Signal Process. 2013, 93, 363–377. [Google Scholar] [CrossRef]
- Bo, Z.; Sun, C.; Xu, Y.; Jiang, S. A variable momentum factor filtered-x weighted accumulated LMS algorithm for narrowband active noise control systems. Measurement 2014, 48, 282–291. [Google Scholar] [CrossRef]
- Harris, C.M. Handbook of Acoustical Measurements and Noise Control; McGraw-Hill: New York, NY, USA, 1991. [Google Scholar]
- Eriksson, L.; Allie, M. Use of random noise for on-line transducer modeling in an adaptive active attenuation system. J. Acoust. Soc. Am. 1989, 85, 797–802. [Google Scholar] [CrossRef]
- Bao, C.; Sas, P.; Van Brussel, H. Adaptive active control of noise in 3-D reverberant enclosures. J. Sound Vib. 1993, 161, 501–514. [Google Scholar] [CrossRef]
- Zhang, M.; Lan, H.; Ser, W. Cross-updated active noise control system with online secondary path modeling. IEEE Trans. Speech Audio Process. 2001, 9, 598–602. [Google Scholar] [CrossRef]
- Akhtar, M.T.; Abe, M.; Kawamata, M. A new variable step size LMS algorithm-based method for improved online secondary path modeling in active noise control systems. IEEE Trans. Audio Speech Lang. Process. 2006, 14, 720–726. [Google Scholar] [CrossRef]
- Davari, P.; Hassanpour, H. A self-tuning feedforward active noise control system. IEICE Electron. Express 2009, 6, 230–236. [Google Scholar] [CrossRef]
- Hassanpour, H.; Davari, P. An efficient online secondary path estimation for feedback active noise control systems. Digit. Signal Process. 2009, 19, 241–249. [Google Scholar] [CrossRef]
- Zhang, M.; Lan, H.; Ser, W. A robust online secondary path modeling method with auxiliary noise power scheduling strategy and norm constraint manipulation. IEEE Trans. Speech Audio Process. 2003, 11, 45–53. [Google Scholar] [CrossRef]
- Akhtar, M.; Abe, M.; Kawamata, M. Noise power scheduling in active noise control systems with online secondary path modeling. IEICE Electron. Express 2007, 4, 66–71. [Google Scholar] [CrossRef]
- Carini, A.; Malatini, S. Optimal variable step-size NLMS algorithms with auxiliary noise power scheduling for feedforward active noise control. IEEE Trans. Audio Speech Lang. Process. 2008, 16, 1383–1395. [Google Scholar] [CrossRef]
- Davari, P.; Hassanpour, H. Designing a new robust on-line secondary path modeling technique for feedforward active noise control systems. Signal Process. 2009, 89, 1195–1204. [Google Scholar] [CrossRef]
- Ahmed, S.; Akhtar, M.T.; Zhang, X. Robust auxiliary-noise-power scheduling in active noise control systems with online secondary path modeling. IEEE Trans. Audio Speech Lang. Process. 2013, 21, 749–761. [Google Scholar] [CrossRef]
- Aslam, M.S.; Raja, M.A.Z. A new adaptive strategy to improve online secondary path modeling in active noise control systems using fractional signal processing approach. Signal Process. 2014, 107, 433–443. [Google Scholar] [CrossRef]
- Xiao, Y.; Ma, L.; Hasegawa, K. Properties of FXLMS-based narrowband active noise control with online secondary-path modeling. IEEE Trans. Signal Process. 2009, 57, 2931–2949. [Google Scholar] [CrossRef]
- Liu, J.; Xiao, Y.; Sun, J.; Xu, L. Analysis of online secondary-path modeling with auxiliary noise scaled by residual noise signal. IEEE Trans. Audio Speech Lang. Process. 2010, 18, 1978–1993. [Google Scholar]
- Bo, Z.; Yang, J.; Sun, C.; Jiang, S. A filtered-x weighted accumulated LMS algorithm: Stochastic analysis and simulations for narrowband active noise control system. Signal Process. 2014, 104, 296–310. [Google Scholar] [CrossRef]
- Kuo, S.M.; Morgan, D. Active Noise Control Systems: Algorithms and DSP Implementations; John Wiley & Sons, Inc.: New York, NY, USA, 1996. [Google Scholar]


© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, C.; Liu, Y.; Bo, Z.; Jiang, S. A New Online Secondary Path Modeling Method with An Auxiliary Noise Power Scheduling Strategy for Narrowband Active Noise Control Systems. Appl. Sci. 2017, 7, 1236. https://doi.org/10.3390/app7121236
Sun C, Liu Y, Bo Z, Jiang S. A New Online Secondary Path Modeling Method with An Auxiliary Noise Power Scheduling Strategy for Narrowband Active Noise Control Systems. Applied Sciences. 2017; 7(12):1236. https://doi.org/10.3390/app7121236
Chicago/Turabian StyleSun, Chao, Yuqi Liu, Zhong Bo, and Shouda Jiang. 2017. "A New Online Secondary Path Modeling Method with An Auxiliary Noise Power Scheduling Strategy for Narrowband Active Noise Control Systems" Applied Sciences 7, no. 12: 1236. https://doi.org/10.3390/app7121236
APA StyleSun, C., Liu, Y., Bo, Z., & Jiang, S. (2017). A New Online Secondary Path Modeling Method with An Auxiliary Noise Power Scheduling Strategy for Narrowband Active Noise Control Systems. Applied Sciences, 7(12), 1236. https://doi.org/10.3390/app7121236