Bibliometric Analysis of Social Robotics Research: Identifying Research Trends and Knowledgebase



Abstract
:1. Introduction
2. Materials and Methods
3. Results
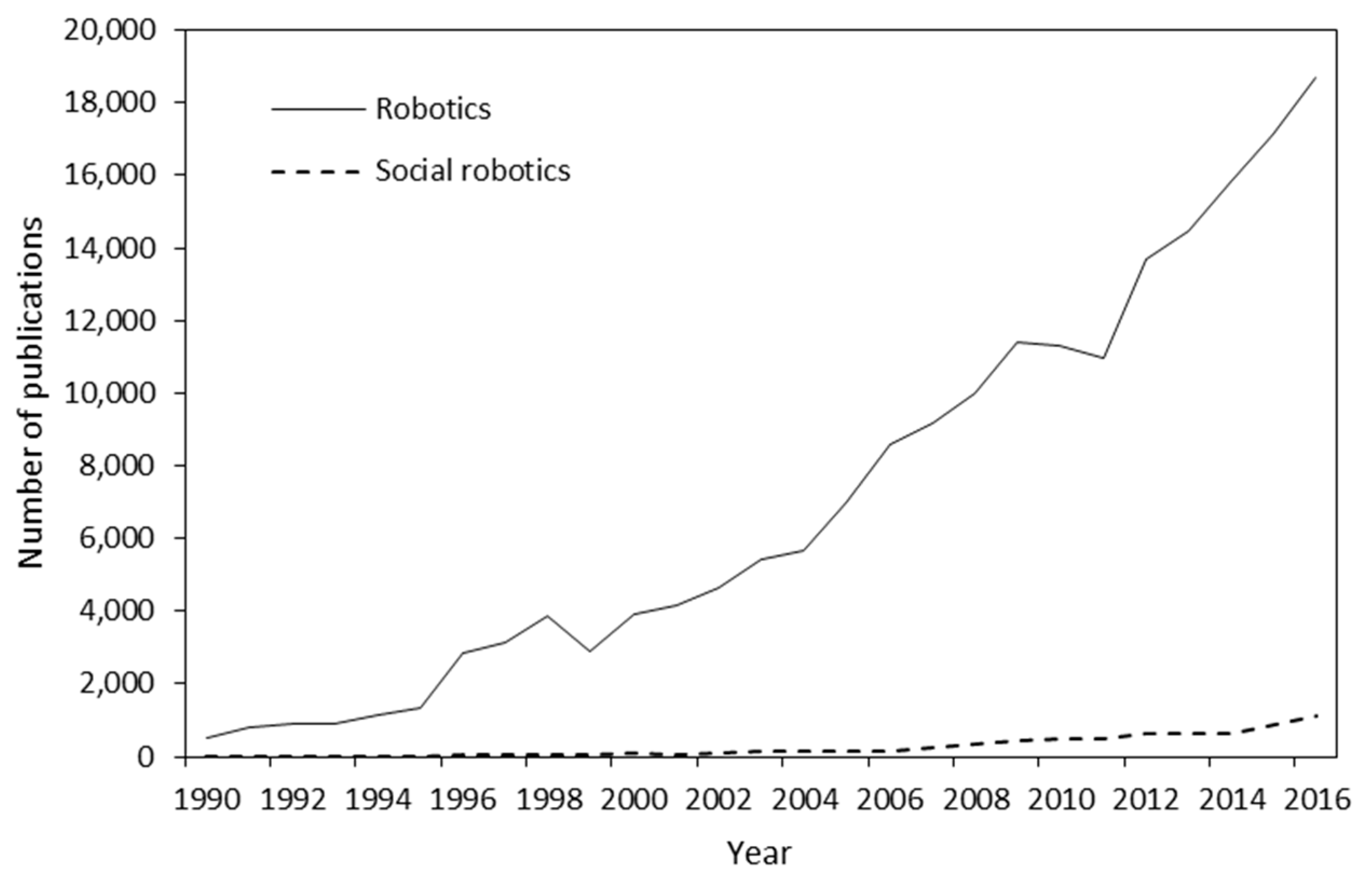
3.1. Robotics and Social Robotics Research
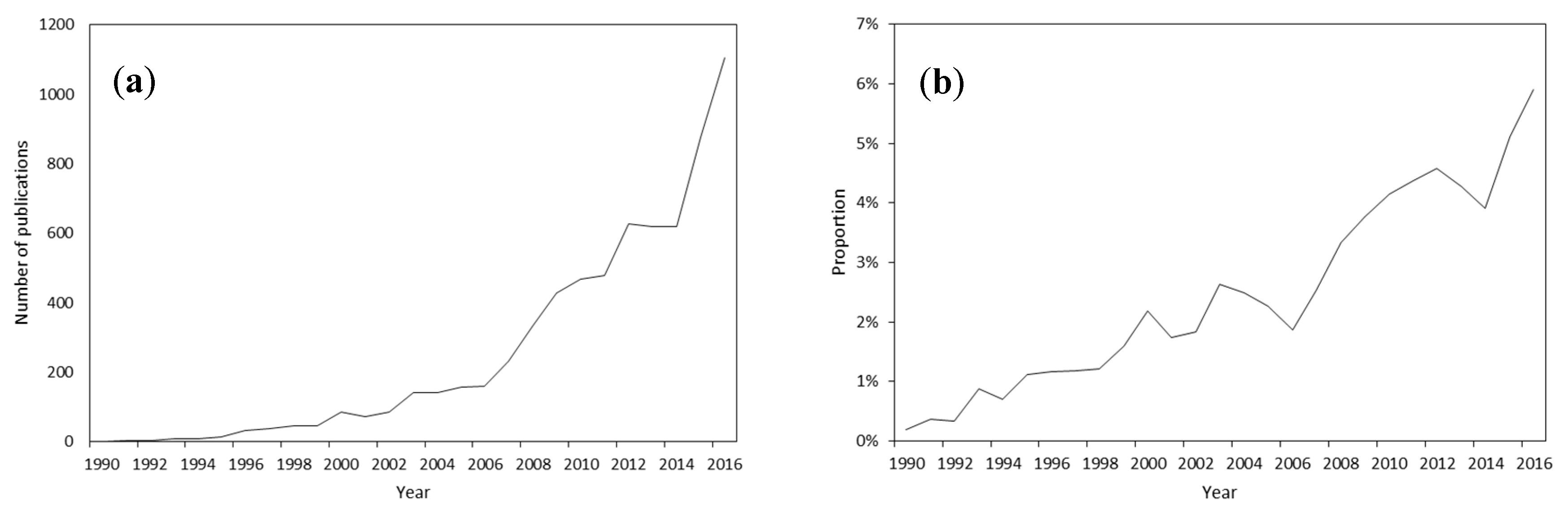
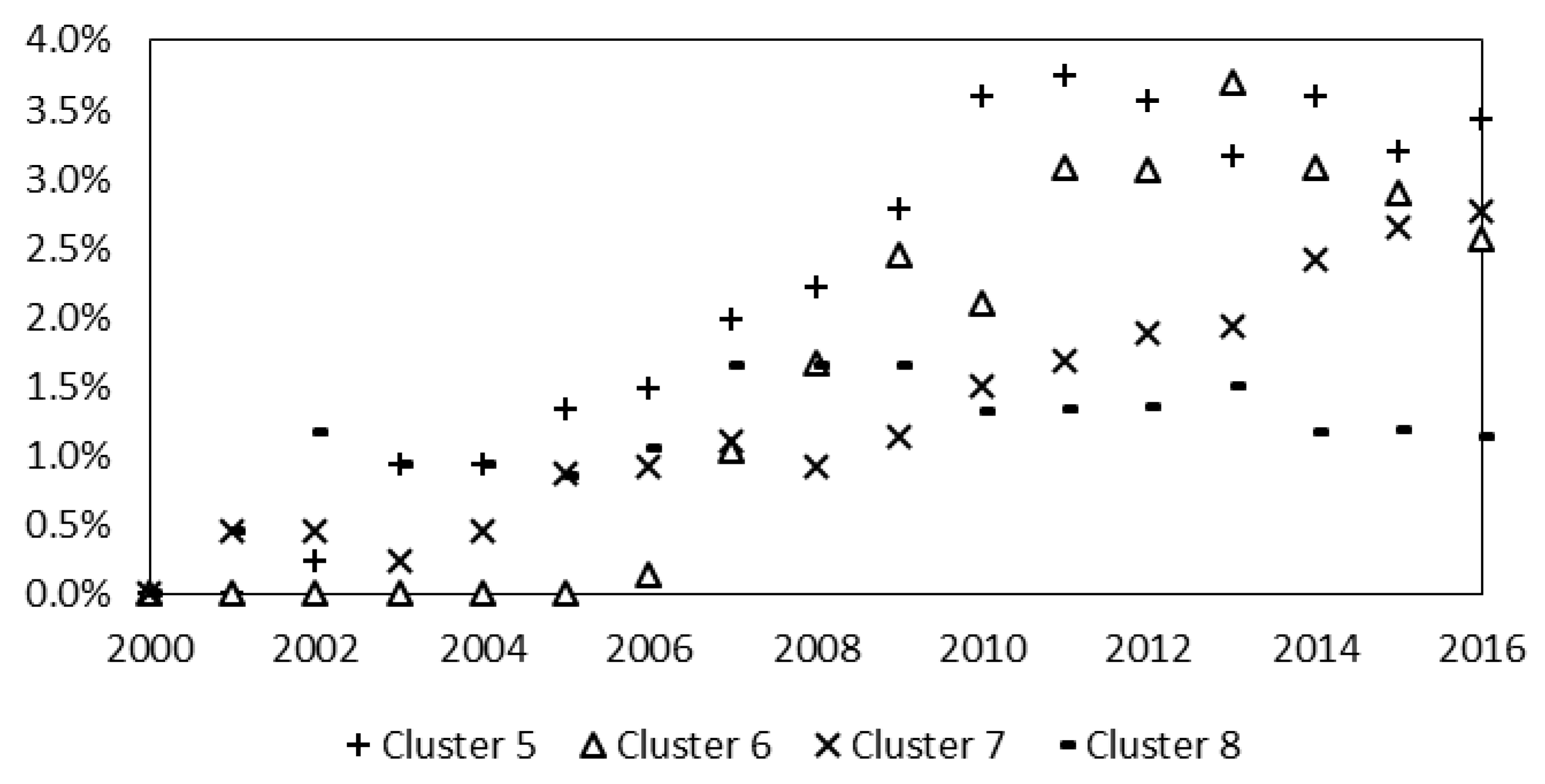
3.2. Research Trends in Social Robotics
4. Discussion
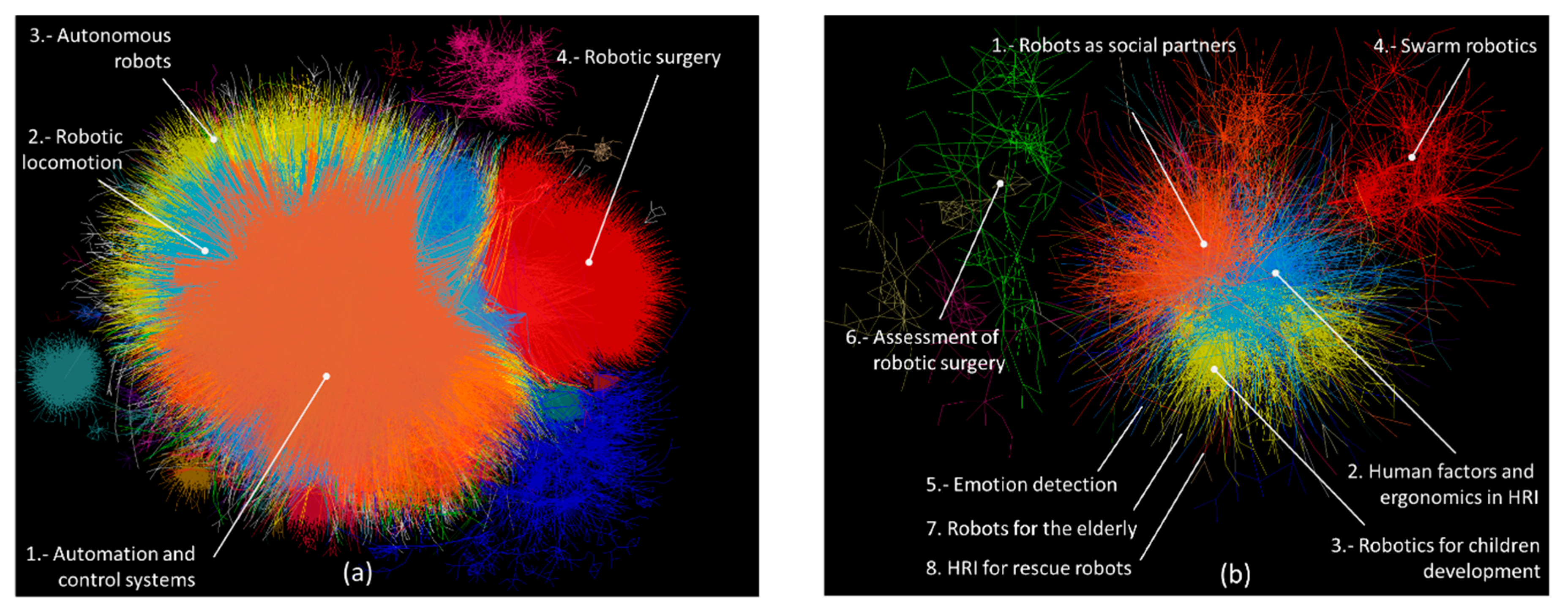
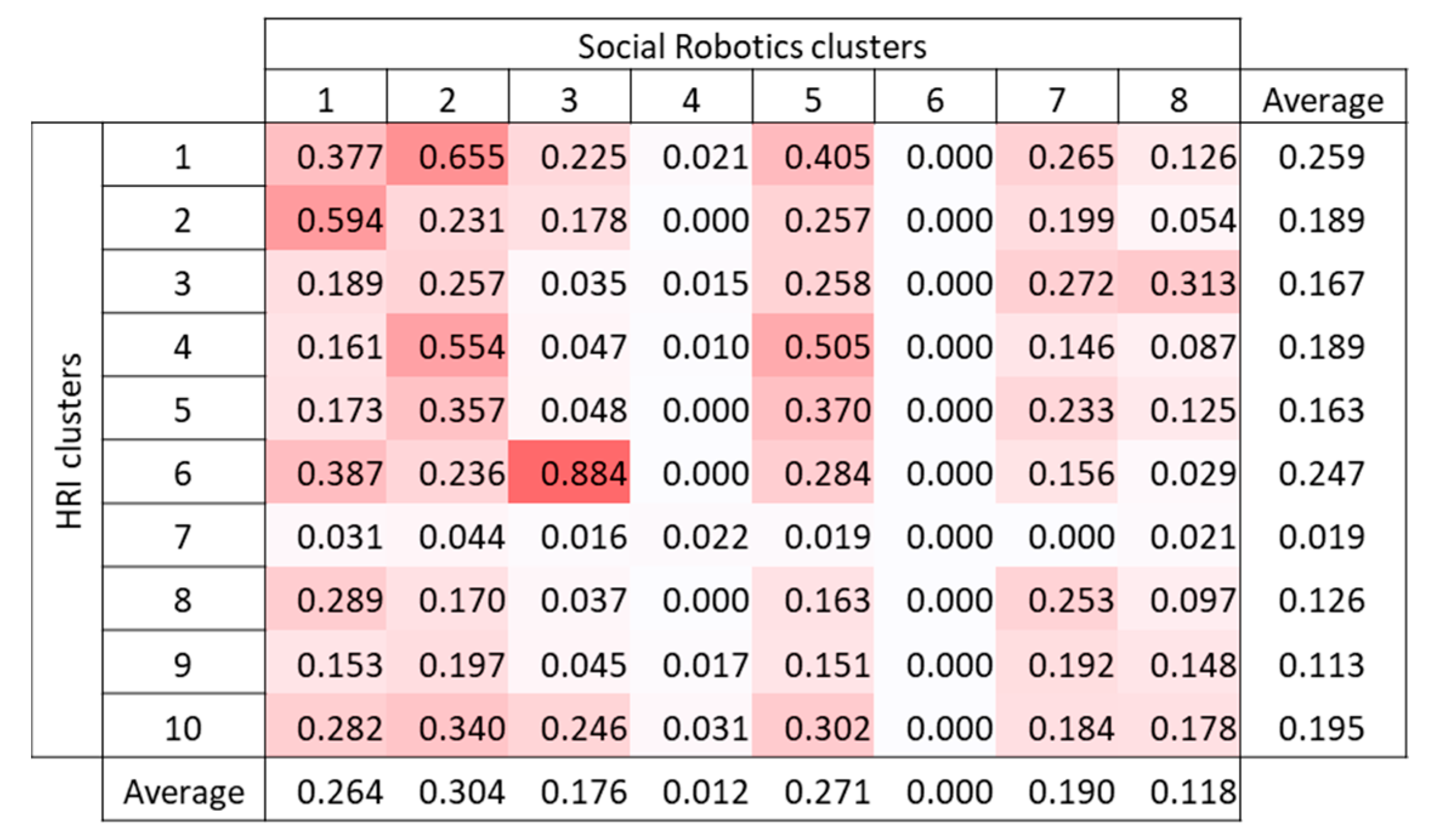
4.1. Structural Difference between Robotics and Social Robotics Research
4.2. Current Context of Social Robotics in Robotics Research
4.3. Missing Elements in the Current Social Robotics Research and Future Perspectives
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
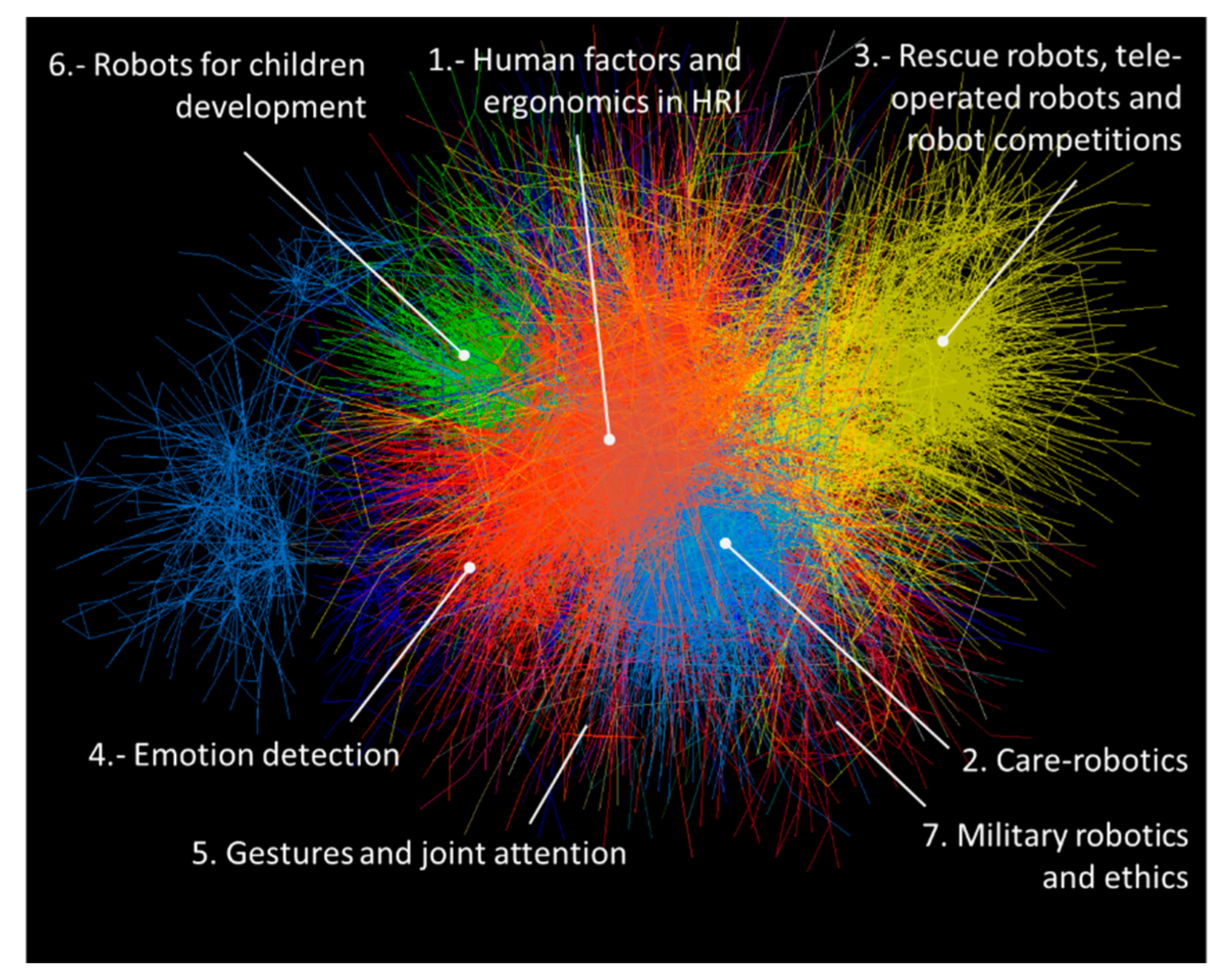
Appendix A. Bibliometric Analysis of Human-Robot Interaction Research

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Sub-Cluster | Size | Average Year | Most Cited |
|---|---|---|---|---|
| 1 | Human factors and ergonomics in human robot interaction | 1296 | 2012.0 | [5] |
| 2 | Care-robotics | 1254 | 2010.8 | [76] |
| 3 | Rescue robots, tele-operated robotics and robot competition | 1239 | 2010.7 | [35] |
| 4 | Emotion detection | 689 | 2010.6 | [77] |
| 5 | Gestures and joint attention | 530 | 2011.5 | [78] |
| 6 | Robot for child development | 497 | 2012.8 | [30] |
| 7 | Military robotics and ethical issues of robots | 203 | 2012.2 | [79] |
| 8 | Algorithms and technologies for care robotics | 199 | 2011.4 | [80] |
| 9 | Hand controllers, robot networks | 186 | 2012.2 | [81] |
| 10 | Real versus on-screen agents | 95 | 2010.5 | [82] |


References
- Reeves, B.; Nass, C. The Media Equation: How People Treat Computers, Television, and New Media Like Real People and Places; Center for the Study of Language and Information: Stanford, CA, USA, 2003. [Google Scholar]
- Ge, S.S.; Matarić, M.J. Preface. Int. J. Soc. Robot. 2009, 1, 1–2. [Google Scholar] [CrossRef]
- ICSR Call for Papers. Available online: http://www.icsr2017.org/ (accessed on 14 September 2017).
- Hegel, F.; Muhl, C.; Wrede, B.; Hielscher-Fastabend, M.; Sagerer, G. Understanding Social Robots. In Proceedings of the Second International Conferences on Advances in Computer-Human Interactions, Cancun, Mexico, 1–7 February 2009. [Google Scholar]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef]
- Breazeal, C. Front Matter. In Designing Sociable Robots; The MIT Press: Cambridge, MA, USA, 2004; ISBN 9780262255837. [Google Scholar]
- Steinert, S. The Five Robots-A Taxonomy for Roboethics. Int. J. Soc. Robot. 2014, 6, 249–260. [Google Scholar] [CrossRef]
- Duffy, B.R.; Rooney, C.F.B.; Hare, G.M.P.O.; Donoghue, R.P.S.O. What is a Social Robot? In Proceedings of the 10th Irish Conference on Artificial Intelligence & Cognitive Science, University College Cork, Ireland, 1–3 September 1999; Available online: http://hdl.handle.net/10197/4412 (accessed on 14 September 2017).
- Kostoff, R.N.; Schaller, R.R. Science and technology roadmaps. IEEE Trans. Eng. Manag. 2001, 48, 132–143. [Google Scholar] [CrossRef]
- Buter, R.K.; Van Raan, A.F.J. Identification and analysis of the highly cited knowledge base of sustainability science. Sustain. Sci. 2013, 8, 253–267. [Google Scholar] [CrossRef]
- Boyack, K.W.; Klavans, R.; Borner, K. Mapping the backbone of science. Scientometrics 2005, 64, 351–374. [Google Scholar] [CrossRef]
- Takeda, Y.; Mae, S.; Kajikawa, Y.; Matsushima, K. Nanobiotechnology as an emerging research domain from nanotechnology: A bibliometric approach. Scientometrics 2009, 80, 23–38. [Google Scholar] [CrossRef]
- Naito, O.; Iwami, S.; Mori, J.; Kajikawa, Y.; Sato, Y.; Kudoh, S.; Ikeuchi, K. Actual State of the Robotic Study Changed by the Implementation in the Real World. J. Robot. Soc. Jpn. 2013, 31, 804–815. [Google Scholar] [CrossRef]
- Goeldner, M.; Herstatt, C.; Tietze, F. The emergence of care robotics—A patent and publication analysis. Technol. Forecast. Soc. Chang. 2015, 92, 115–131. [Google Scholar] [CrossRef]
- Ittipanuvat, V.; Fujita, K.; Sakata, I.; Kajikawa, Y. Finding linkage between technology and social issue: A Literature Based Discovery approach. J. Eng. Technol. Manag. 2014, 32, 160–184. [Google Scholar] [CrossRef]
- Mejia, C.; Kajikawa, Y. The field of social robotics as means of technology selection to address country specific social issues. In Proceedings of the 2016 Portland International Conference on Management of Engineering and Technology (PICMET), Honolulu, HI, USA, 4–8 September 2016; pp. 2913–2921. [Google Scholar]
- Small, H. Co-citation in the Scientific Literature: A New Measure of the Relationship between Two Documents. J. Am. Soc. Inf. Sci. 1973, 24, 265–269. [Google Scholar] [CrossRef]
- Kessler, M. An experimental study of bibliographic coupling between technical papers (Corresp.). IEEE Trans. Inf. Theory 1963, 9, 49–51. [Google Scholar] [CrossRef]
- Klavans, R.; Boyack, K.W. Which Type of Citation Analysis Generates the Most Accurate Taxonomy of Scientific and Technical Knowledge? J. Assoc. Inf. Sci. Technol. 2017, 68, 984–998. [Google Scholar] [CrossRef]
- Shibata, N.; Kajikawa, Y.; Takeda, Y.; Matsushima, K. Detecting emerging research fronts based on topological measures in citation networks of scientific publications. Technovation 2008, 28, 758–775. [Google Scholar] [CrossRef]
- Clauset, A.; Moore, C.; Newman, M.E.J. Hierarchical structure and the prediction of missing links in networks. Nature 2008, 453, 98–101. [Google Scholar] [CrossRef] [PubMed]
- Adai, A.T.; Date, S.V.; Wieland, S.; Marcotte, E.M. LGL: Creating a map of protein function with an algorithm for visualizing very large biological networks. J. Mol. Biol. 2004, 340, 179–190. [Google Scholar] [CrossRef] [PubMed]
- Thiring, M. Design of robot slaves for creative society. Cybernetica 1970, 13, 55. [Google Scholar]
- Dautenhahn, K. Getting to know each other—Artificial social intelligence for autonomous robots. Robot. Auton. Syst. 1995, 16, 333–356. [Google Scholar] [CrossRef]
- Fraley, N.E., Jr. Prejudice, segregation and immigration laws—Integration of the robot into the laboratory society. J. Automat. Chem. 1994, 16, 139–141. [Google Scholar] [CrossRef] [PubMed]
- Bruce, V. What the human face tells the human mind: Some challenges for the robot-human interface. Adv. Robot. 1993, 8, 341–355. [Google Scholar] [CrossRef]
- Mataric, M.J. Designing and understanding adaptive group behavior. Adapt. Behav. 1995, 4, 51–80. [Google Scholar] [CrossRef]
- Bühler, C.; Hoelper, R.; Hoyer, H.; Humann, W. Autonomous robot technology for advanced wheelchair and robotic aids for people with disabilities. Robot. Auton. Syst. 1995, 14, 213–222. [Google Scholar] [CrossRef]
- Kanda, T.; Hirano, T.; Eaton, D.; Ishiguro, H. Interactive Robots as Social Partners and Peer Tutors for Children: A Field Trial. Hum. Comput. Interact. 2004, 19, 61–84. [Google Scholar] [CrossRef]
- Scassellati, B.; Admoni, H.; Matarić, M. Robots for Use in Autism Research. Annu. Rev. Biomed. Eng. 2012. [Google Scholar] [CrossRef] [PubMed]
- Bonabeau, E.; Dorigo, M.; Theraulaz, G. Inspiration for optimization from social insect behaviour. Nature 2000. [Google Scholar] [CrossRef] [PubMed]
- Bailenson, J.N.; Yee, N.; Brave, S.; Merget, D.; Koslow, D. Virtual interpersonal touch: Expressing and recognizing emotions through haptic devices. Hum. Comput. Interact. 2007. [Google Scholar] [CrossRef]
- Haber, G.P.; White, W.M.; Crouzet, S.; White, M.A.; Forest, S.; Autorino, R.; Kaouk, J.H. Robotic versus laparoscopic partial nephrectomy: Single-surgeon matched cohort study of 150 patients. Urology 2010. [Google Scholar] [CrossRef] [PubMed]
- Fasola, J.; Mataric, M.J. Using Socially Assistive Human-Robot Interaction to Motivate Physical Exercise for Older Adults. Proc. IEEE 2012, 100, 2512–2526. [Google Scholar] [CrossRef]
- Casper, J.; Murphy, R.R. Human-robot interactions during the robot-assisted urban search and rescue response at the World Trade Center. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2003. [Google Scholar] [CrossRef] [PubMed]
- Leite, I.; Martinho, C.; Paiva, A. Social Robots for Long-Term Interaction: A Survey. Int. J. Soc. Robot. 2013, 5, 291–308. [Google Scholar] [CrossRef]
- Sabanovic, S. Socializing co-robots: Incorporating users and situated interaction in the design of collaborative robots. In Proceedings of the 2014 International Conference on Collaboration Technologies and Systems (CTS), Minneapolis, MN, USA, 19–23 May 2014; pp. 113–114. [Google Scholar]
- Tsarouchi, P.; Makris, S.; Chryssolouris, G. Human—Robot interaction review and challenges on task planning and programming. Int. J. Comput. Integr. Manuf. 2016, 29, 916–931. [Google Scholar] [CrossRef]
- Mori, M.; MacDorman, K. The uncanny valley. Energy 1970. [Google Scholar] [CrossRef]
- Duffy, B.R. Anthropomorphism and the social robot. Robot. Auton. Syst. 2003, 42, 177–190. [Google Scholar] [CrossRef]
- Kim, Y.; Baylor, A.L. Research-Based Design of Pedagogical Agent Roles: A Review, Progress, and Recommendations. Int. J. Artif. Intell. Educ. 2016, 26, 160–169. [Google Scholar] [CrossRef]
- Mathur, M.B.; Reichling, D.B. Navigating a social world with robot partners: A quantitative cartography of the Uncanny Valley. Cognition 2016, 146, 22–32. [Google Scholar] [CrossRef] [PubMed]
- Diehl, J.J.; Schmitt, L.M.; Villano, M.; Crowell, C.R. The clinical use of robots for individuals with Autism Spectrum Disorders: A critical review. Res. Autism Spectr. Disord. 2012, 6, 249–262. [Google Scholar] [CrossRef] [PubMed]
- Meltzoff, A.N.; Kuhl, P.K.; Movellan, J. Foundations for a new science of learning. Science 2009, 325, 284–288. [Google Scholar] [CrossRef] [PubMed]
- Cronin, B.; Overfelt, K. The Scholars Courtesy—A Survey of Acknowledgment Behavior. J. Doc. 1994, 50, 165–196. [Google Scholar] [CrossRef]
- Rohlfing, K.J.; Wrede, B.; Vollmer, A.-L.; Oudeyer, P.-Y. An Alternative to Mapping a Word onto a Concept in Language Acquisition: Pragmatic Frames. Front. Psychol. 2016, 7, 470. [Google Scholar] [CrossRef] [PubMed]
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm robotics: A review from the swarm engineering perspective. SWARM Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef]
- Halloy, J.; Sempo, G.; Caprari, G.; Rivault, C.; Asadpour, M.; Tache, F.; Said, I.; Durier, V.; Canonge, S.; Ame, J.M.; et al. Social integration of robots into groups of cockroaches to control self-organized choices. Science 2007, 318, 1155–1158. [Google Scholar] [CrossRef] [PubMed]
- McColl, D.; Hong, A.; Hatakeyama, N.; Nejat, G.; Benhabib, B. A Survey of Autonomous Human Affect Detection Methods for Social Robots Engaged in Natural HRI. J. Intell. Robot. Syst. 2016, 82, 101–133. [Google Scholar] [CrossRef]
- Yohanan, S.; MacLean, K.E. The Role of Affective Touch in Human-Robot Interaction: Human Intent and Expectations in Touching the Haptic Creature. Int. J. Soc. Robot. 2012, 4, 163–180. [Google Scholar] [CrossRef]
- Adalgeirsson, S.O.; Breazeal, C. MeBot. In Proceedings of the 5th ACM/IEEE International Conference on Human-Robot Interaction—HRI ’10, Nara, Japan, 2–5 March 2010; p. 15. [Google Scholar]
- Fiore, S.M.; Wiltshire, T.J.; Lobato, E.J.C.; Jentsch, F.G.; Huang, W.H.; Axelrod, B. Toward understanding social cues and signals in human-robot interaction: Effects of robot gaze and proxemic behavior. Front. Psychol. 2013, 4. [Google Scholar] [CrossRef] [PubMed]
- Cortés, X.; Serratosa, F. Cooperative pose estimation of a fleet of robots based on interactive points alignment. Expert Syst. Appl. 2016, 45, 150–160. [Google Scholar] [CrossRef]
- Dindo, H.; Donnarumma, F.; Chersi, F.; Pezzulo, G. The intentional stance as structure learning: A computational perspective on mindreading. Biol. Cybern. 2015, 109, 453–467. [Google Scholar] [CrossRef] [PubMed]
- Mejia, C.; Kajikawa, Y. Assessing the sentiment of social expectations of robotic technologies. In Proceedings of the 2017 Portland International Conference on Management of Engineering and Technology (PICMET), Portland, OR, USA, 9–13 July 2017. [Google Scholar]
- International Federation of Robotics. Executive Summary. World Robotics 2016 Service Robotics. Available online: https://ifr.org/downloads/press/02_2016/Executive_Summary_Service_Robots_2016.pdf/ (accessed on 26 August 2017).
- Argall, B.D.; Chernova, S.; Veloso, M.; Browning, B. A survey of robot learning from demonstration. Robot. Auton. Syst. 2009, 57, 469–483. [Google Scholar] [CrossRef]
- Yim, M.; Shen, W.-M.; Salemi, B.; Rus, D.; Moll, M.; Lipson, H.; Klavins, E.; Chirikjian, G.S. Modular self-reconfigurable robot systems—Challenges and opportunities for the future. IEEE Robot. Autom. Mag. 2007, 14, 43–52. [Google Scholar] [CrossRef]
- Brooks, R.A. Intelligence without representation. Artif. Intell. 1991, 47, 139–159. [Google Scholar] [CrossRef]
- Charalampous, K.; Kostavelis, I.; Gasteratos, A. Recent trends in social aware robot navigation: A survey. Robot. Auton. Syst. 2017, 93, 85–104. [Google Scholar] [CrossRef]
- Hall, E. The Hidden Dimension: Man’s Use of Space in Public and in Private; Bodley Head: London, UK, 1969; ISBN 0385084765. [Google Scholar]
- Picard, R.W. Affective Computing. Affect. Comput. 1997. [Google Scholar] [CrossRef]
- Broekens, J.; Heerink, M.; Rosendal, H. Assistive social robots in elderly care: A review Assistive social robots. Gerontechnology 2009. [Google Scholar] [CrossRef]
- Robins, B.; Dautenhahn, K.; Te Boekhorst, R.; Billard, A. Robotic assistants in therapy and education of children with autism: Can a small humanoid robot help encourage social interaction skills? Univers. Access Inf. Soc. 2005. [Google Scholar] [CrossRef]
- Dautenhahn, K.; Werry, I. Towards interactive robots in autism therapy: Background, motivation and challenges. Pragmat. Cogn. 2004. [Google Scholar] [CrossRef]
- Nass, C.; Moon, Y. Machines and Mindlessness: Social Responses to Computers. J. Soc. Issues 2000. [Google Scholar] [CrossRef]
- Bonabeau, E.; Dorigo, M.; Theraulaz, G. Swarm Intelligence: From Natural to Artificial Systems; Oxford University Press: Oxford, UK, 1999; ISBN 9780195131598. [Google Scholar]
- Šabanovic, S. Robots in society, society in robots: Mutual shaping of society and technology as a framework for social robot design. Int. J. Soc. Robot. 2010, 2, 439–450. [Google Scholar] [CrossRef]
- Bartneck, C.; Kulić, D.; Croft, E.; Zoghbi, S. Measurement instruments for the anthropomorphism, animacy, likeability, perceived intelligence, and perceived safety of robots. Int. J. Soc. Robot. 2009, 1, 71–81. [Google Scholar] [CrossRef]
- Faber, M.; Bützler, J.; Schlick, C.M. Human-robot Cooperation in Future Production Systems: Analysis of Requirements for Designing an Ergonomic Work System. Procedia Manuf. 2015, 3, 510–517. [Google Scholar] [CrossRef]
- Haddadin, S.; Albu-Schäffer, A.; Hirzinger, G. Requirements for Safe Robots: Measurements, Analysis and New Insights. Int. J. Robot. Res. 2009, 28, 1507–1527. [Google Scholar] [CrossRef] [Green Version]
- Makris, S.; Karagiannis, P.; Koukas, S.; Matthaiakis, A.-S. Augmented reality system for operator support in human–robot collaborative assembly. CIRP Ann. 2016, 65, 61–64. [Google Scholar] [CrossRef]
- Trautman, P.; Ma, J.; Murray, R.M.; Krause, A. Robot navigation in dense human crowds: Statistical models and experimental studies of human-robot cooperation. Int. J. Robot. Res. 2015, 34, 335–356. [Google Scholar] [CrossRef]
- Salton, G.; Buckley, C. Term-weighting approaches in automatic text retrieval. Inf. Process. Manag. 1988, 24, 513–523. [Google Scholar] [CrossRef]
- Singhal, A. Modern Information Retrieval: A Brief Overview. Bull. IEEE Comput. Soc. Technol. Comm. Data Eng. 2001. [Google Scholar]
- Broadbent, E.; Stafford, R.; MacDonald, B. Acceptance of healthcare robots for the older population: Review and future directions. Int. J. Soc. Robot. 2009, 1, 319–330. [Google Scholar] [CrossRef]
- Breazeal, C. Emotion and sociable humanoid robots. Int. J. Hum. Comput. Stud. 2003, 59, 119–155. [Google Scholar] [CrossRef]
- Sidner, C.L.; Lee, C.; Kidd, C.D.; Lesh, N.; Rich, C. Explorations in engagement for humans and robots. Artif. Intell. 2005. [Google Scholar] [CrossRef]
- Allen, C.; Varner, G.; Zinser, J. Prolegomena to any future artificial moral agent. J. Exp. Theor. Artif. Intell. 2000. [Google Scholar] [CrossRef]
- Pineau, J.; Montemerlo, M.; Pollack, M.; Roy, N.; Thrun, S. Towards robotic assistants in nursing homes: Challenges and results. Robot. Auton. Syst. 2003, 42, 271–281. [Google Scholar] [CrossRef]
- Hoffman, G.; Breazeal, C. Cost-based anticipatory action selection for human-robot fluency. IEEE Trans. Robot. 2007, 23, 952–961. [Google Scholar] [CrossRef]
- Shinozawa, K.; Naya, F.; Yamato, J.; Kogure, K. Differences in effect of robot and screen agent recommendations on human decision-making. Int. J. Hum. Comput. Stud. 2005. [Google Scholar] [CrossRef]
- Sparrow, R. Predators or plowshares? Arms control of robotic weapons. IEEE Technol. Soc. Mag. 2009. [Google Scholar] [CrossRef]
- Bringsjord, S.; Arkoudas, K.; Bello, P. Toward a general logicist methodology for engineering ethically correct robots. IEEE Intell. Syst. 2006. [Google Scholar] [CrossRef]
- Pulasinghe, K.; Watanabe, K.; Izumi, K.; Kiguchi, K. Modular Fuzzy-Neuro Controller Driven by Spoken Language Commands. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2004. [Google Scholar] [CrossRef]
- Jayawardena, C.; Watanabe, K.; Izumi, K. Controlling a robot manipulator with fuzzy voice commands using a probabilistic neural network. Neural Comput. Appl. 2007. [Google Scholar] [CrossRef]
- Chan, W.P.; Parker, C.A.C.; Van der Loos, H.F.M.; Croft, E.A. A human-inspired object handover controller. Int. J. Robot. Res. 2013. [Google Scholar] [CrossRef]
- Kamei, K.; Nishio, S.; Hagita, N.; Sato, M. Cloud networked robotics. IEEE Netw. 2012. [Google Scholar] [CrossRef]
- Chang, C.W.; Lee, J.H.; Wang, C.Y.; Chen, G.D. Improving the authentic learning experience by integrating robots into the mixed-reality environment. Comput. Educ. 2010. [Google Scholar] [CrossRef]
- Dario, P.; Guglielmelli, E.; Laschi, C. Humanoids and personal robots: Design and experiments. J. Robot. Syst. 2001, 18, 673–690. [Google Scholar] [CrossRef]






| # | Cluster | Sub-Cluster | Articles | % |
|---|---|---|---|---|
| 1 | Automation and control systems | 1.1 Path planning/Obstacle avoidance | 14,885 | 10.4% |
| 1.2 Visual servoing | 10,884 | 7.6% | ||
| 1.3 Robot manipulators | 9020 | 6.3% | ||
| 2 | Robotic locomotion | 2.1 Walking robots | 11,431 | 8.0% |
| 2.2 Robot learning | 10,020 | 7.0% | ||
| 2.3 Rehabilitation Robotics | 8588 | 6.0% | ||
| 3 | Autonomous robots | 3.1 Simultaneous localization and mapping | 8220 | 5.8% |
| 3.2 Human-Robot Interaction | 6481 | 4.5% | ||
| 3.3 Tactile sensing and robotic grasping | 6368 | 4.5% | ||
| 4 | Robotic surgery | 4.1 Robotic assisted surgery | 5061 | 3.5% |
| 4.2 Robot assisted radical prostatectomy | 3859 | 2.7% | ||
| 4.3 Transoral robotic surgery | 3585 | 2.5% |
| # | Cluster | Articles | % |
|---|---|---|---|
| 1 | Robots as social partners | 775 | 23.2% |
| 2 | Human factors and ergonomics in human robot interaction | 665 | 19.9% |
| 3 | Robotics for child development | 628 | 18.8% |
| 4 | Swarm robotics | 340 | 10.2% |
| 5 | Emotion detection | 198 | 5.9% |
| 6 | Assessment of robotic surgery | 169 | 5.1% |
| 7 | Robots for the elderly, and telepresence | 129 | 3.9% |
| 8 | Human-robot interaction in rescue robotics | 88 | 2.6% |
| # | Cluster Label | Country | Institution | Journals/Conferences | Authors |
|---|---|---|---|---|---|
| 1 | Robots as social partners 2013.1; [29] * | USA Japan UK Germany The Netherlands | Osaka Univ. Univ. Twente Advanced Telecom.-Research Inst. Univ. Washington | IJSR** LNAI ACM/IEEE HRI IROS | Kanda, T. Ishiguro, H. Hagita, N. Shiomi, M. Glas, D.F. |
| 2 | Human factors and ergonomics in human robot interaction 2012.1; [5] | USA Japan UK Germany France | Univ. Bielefeld Univ. Hertfordshire Osaka Univ. MIT Waseda Univ. | LNAI ACM/IEEE HRI IJSR IEEE ROMAN | Ishiguro, H. Dautenhahn, K. Breazeal, C. Eyssel, F. Wrede, B. |
| 3 | Robotics for children development 2011.7; [30] | USA UK Japan France Italy | Univ. Hertfordshire Vrije Univ. Brussel Univ. Bielefeld Osaka Univ. Univ. Babes Bolyai | IJSR LNAI IEEE TAMD Advanced Robotics | Dautenhahn, K. Vanderborght, B. Robins, B. Nehaniv, C.L. Scassellati, B. |
| 4 | Swarm robotics 2010.4; [31] | USA Belgium Italy UK Switzerland | Ecole Polytech Lausanne Univ. Libre Bruxelles NYU Georgia Inst. Technol. Univ. Lausanne | LNCS LNAI Adaptive Behavior Bioinspiration & Biomimetics | Dorigo, M. Porfiri, M. Schmickl, T. Takanishi, A. Mondada, F. |
| 5 | Emotion detection 2012.6; [32] | USA Japan The Netherlands Spain UK | Univ. Carlos III Madrid Osaka Univ. Univ. Toronto Tech. Univ. Munich Eindhoven Univ. Technol. | ACM/IEEE HRI LNAI LNCS IJSR | Salichs, M.A. Nejat, G. Alonso-Martin, F. Ishiguro, H. Malfaz, M. |
| 6 | Assessment of robotic surgery 2013.1; [33] | USA UK Italy South Korea France | Roswell Park Cancer Inst. Univ. N. Carolina Cleveland Clinic Univ. Michigan Memorial Sloan Kettering-Cancer Center | Journal of Endourology BJU International European Urology Urology The Journal of Urology | Guru, K.A. Autorino, R. Kaouk, J.H. Mottrie, A. Haber, G.P. |
| 7 | Robots for the elderly and telepresence 2013.0; [34] | USA Japan Germany UK Sweden | Ilmenau Univ. Technol. Univ. So Calif Univ. Orebro Georgia Inst. Technol. Saitama Univ. | ACM/IEEE HRI IJSR LNAI IROS | Gross, HM Mataric, M.J. Mueller, S. Murphy, R.R. Loutfi, A. |
| 8 | Human-robot interaction in rescue robotics 2011.7; [35] | USA Japan Italy France UK | MIT Univ. S. Florida Univ. Central Florida Consiglio Nazionale delle-Ricerche Kyoto Univ. | Advanced Robotics LNAI ACM/IEEE HRI IEEE Humanoids | Fiore, S.M. Wiltshire, T.J. Pandey, A.K. Pezzulo, G. Nakadai, K. |
| Journal/Conference | % of Articles |
|---|---|
| Lecture notes on artificial intelligence | 6.1% |
| International journal of social robotics | 5.9% |
| ACM/IEEE international conference on human-robot interaction | 3.7% |
| Lecture notes on computer science | 2.8% |
| IEEE robot and human interactive communication | 2.5% |
| # | Cluster | Sub-Cluster | Social Robotics Articles | % |
|---|---|---|---|---|
| 1 | Automation and control systems | 1.1 Path planning/obstacle avoidance | 175 | 5.2% |
| 1.2 Visual servoing | 1 | 0.0% | ||
| 1.3 Robot manipulators | 4 | 0.1% | ||
| 2 | Robotic locomotion | 2.1 Walking robots | 16 | 0.5% |
| 2.2 Robot learning | 539 | 16.2% | ||
| 2.3 Rehabilitation robotics | 40 | 1.2% | ||
| 3 | Autonomous robots | 3.1 Simultaneous localization and mapping | 21 | 0.6% |
| 3.2 Human-robot interaction | 1959 | 58.8% | ||
| 3.3 Tactile sensing and robotic grasping | 42 | 1.3% | ||
| 4 | Robotic surgery | 4.1 Robotic assisted surgery | 111 | 3.3% |
| 4.2 Robot assisted radical prostatectomy | 76 | 2.3% | ||
| 4.3 Transoral robotic surgery | 37 | 1.1% |
| Robotics Research Clusters | References | Citations | ||
|---|---|---|---|---|
| Number | % | Number | % | |
| 1. Automation and control systems | 1554 | 14.33% | 3172 | 10.87% |
| 2. Robotic locomotion | 2893 | 26.68% | 7803 | 26.74% |
| 3. Autonomous robots | 2922 | 26.95% | 11,539 | 39.55% |
| 4. Robotic surgery | 2624 | 24.20% | 5286 | 18.12% |
| Source indicator | Total | Inside | Outside |
|---|---|---|---|
| References | 144,715 | 10,843 (7%) | 133,872 (93%) |
| Citations | 211,171 | 29,178 (14%) | 181,993 (86%) |
| Average | 1.45 | 2.69 | 1.36 |
| # | Title | Type | Author | Year | Citations |
|---|---|---|---|---|---|
| 1 | Designing Sociable Robots [6] | Book | Breazal, C. | 2002 | 199 |
| 2 | The Media Equation: How People Treat Computers, Television, and New Media Like Real People and Places [1] | Book | Reeves, B. | 1996 | 186 |
| 3 | The Uncanny Valley [39] | Article | Mori, M. | 1970 | 159 |
| 4 | The Hidden Dimension [61] | Book | Hall Edward, T. | 1966 | 110 |
| 5 | Affective Computing [62] | Book | Picard, R. | 1997 | 76 |
| 6 | Assistive social robots in elderly care: a review [63] | Article | Broekens, J. | 2009 | 75 |
| 7 | Robotic assistants in therapy and education of children with autism: can a small humanoid robot help encourage social interaction skills? [64] | Article | Robins, B. | 2005 | 74 |
| 8 | Towards interactive robots in autism therapy: Background, motivation and challenges [65] | Article | Dauthenhahn, K. | 2004 | 73 |
| 9 | Machines and Mindlessness: Social Responses to Computers [66] | Article | Nass, C. | 2000 | 73 |
| 10 | Swarm Intelligence [67] | Book | Bonabeau, E. | 1999 | 69 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mejia, C.; Kajikawa, Y. Bibliometric Analysis of Social Robotics Research: Identifying Research Trends and Knowledgebase. Appl. Sci. 2017, 7, 1316. https://doi.org/10.3390/app7121316
Mejia C, Kajikawa Y. Bibliometric Analysis of Social Robotics Research: Identifying Research Trends and Knowledgebase. Applied Sciences. 2017; 7(12):1316. https://doi.org/10.3390/app7121316
Chicago/Turabian StyleMejia, Cristian, and Yuya Kajikawa. 2017. "Bibliometric Analysis of Social Robotics Research: Identifying Research Trends and Knowledgebase" Applied Sciences 7, no. 12: 1316. https://doi.org/10.3390/app7121316
APA StyleMejia, C., & Kajikawa, Y. (2017). Bibliometric Analysis of Social Robotics Research: Identifying Research Trends and Knowledgebase. Applied Sciences, 7(12), 1316. https://doi.org/10.3390/app7121316