
Gait Planning Research for an Electrically Driven Large-Load-Ratio Six-Legged Robot


Abstract
:1. Introduction
2. Configuration and Walking Gait of the Large-Load-Ratio Six-Legged Robot
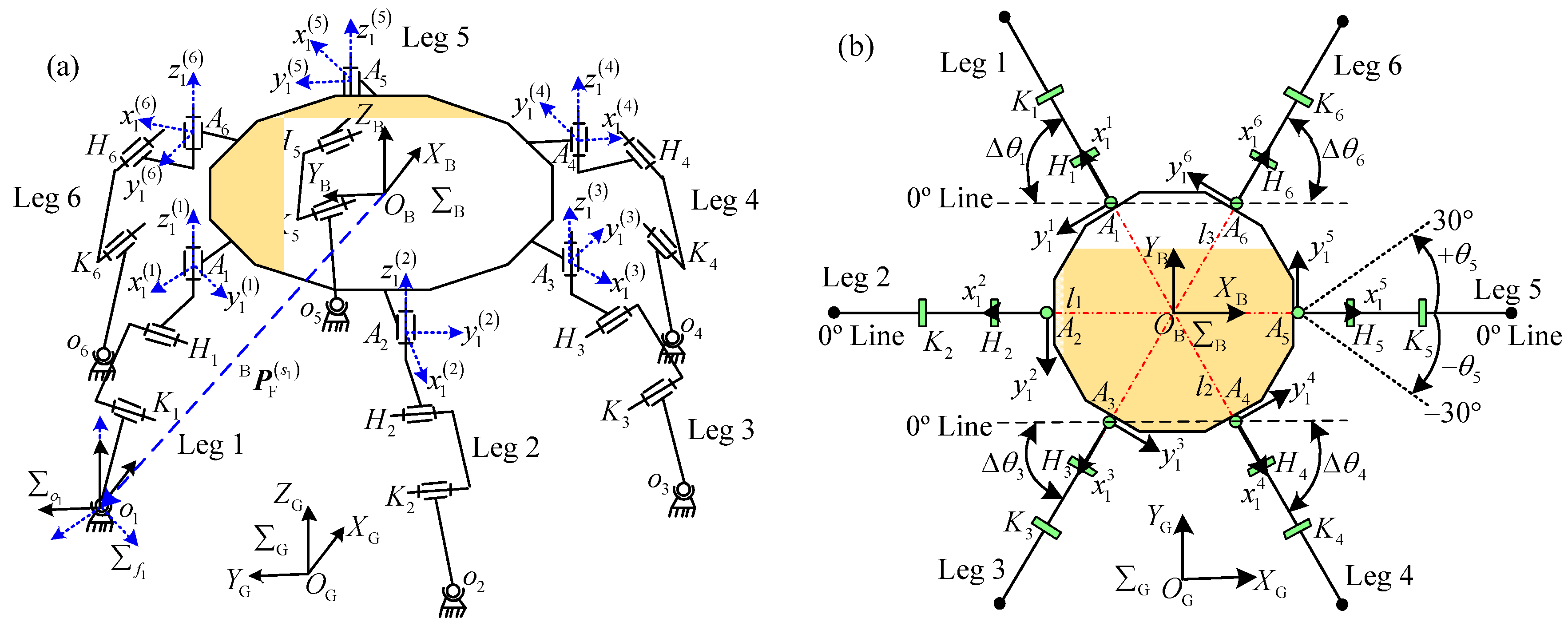
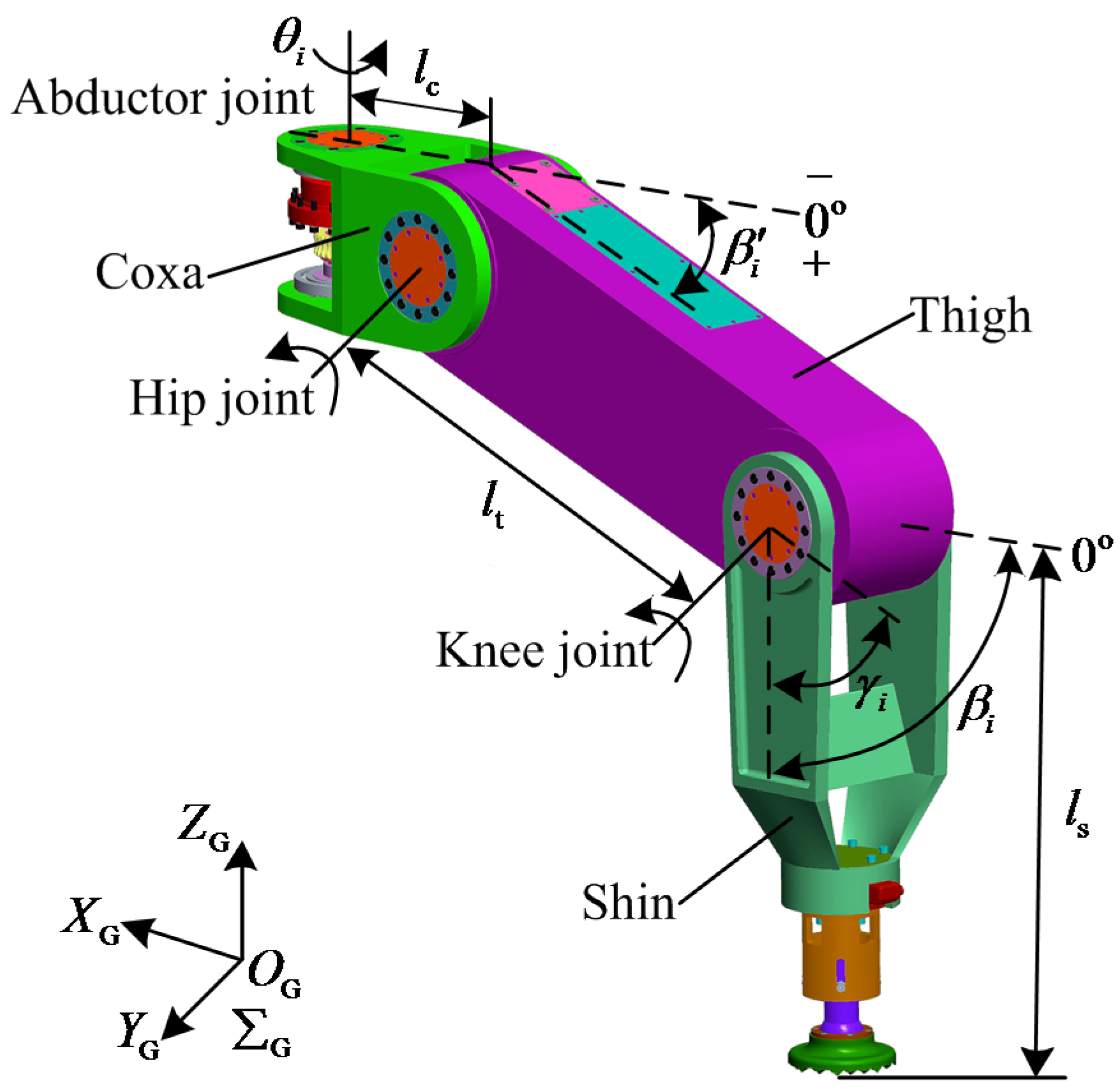
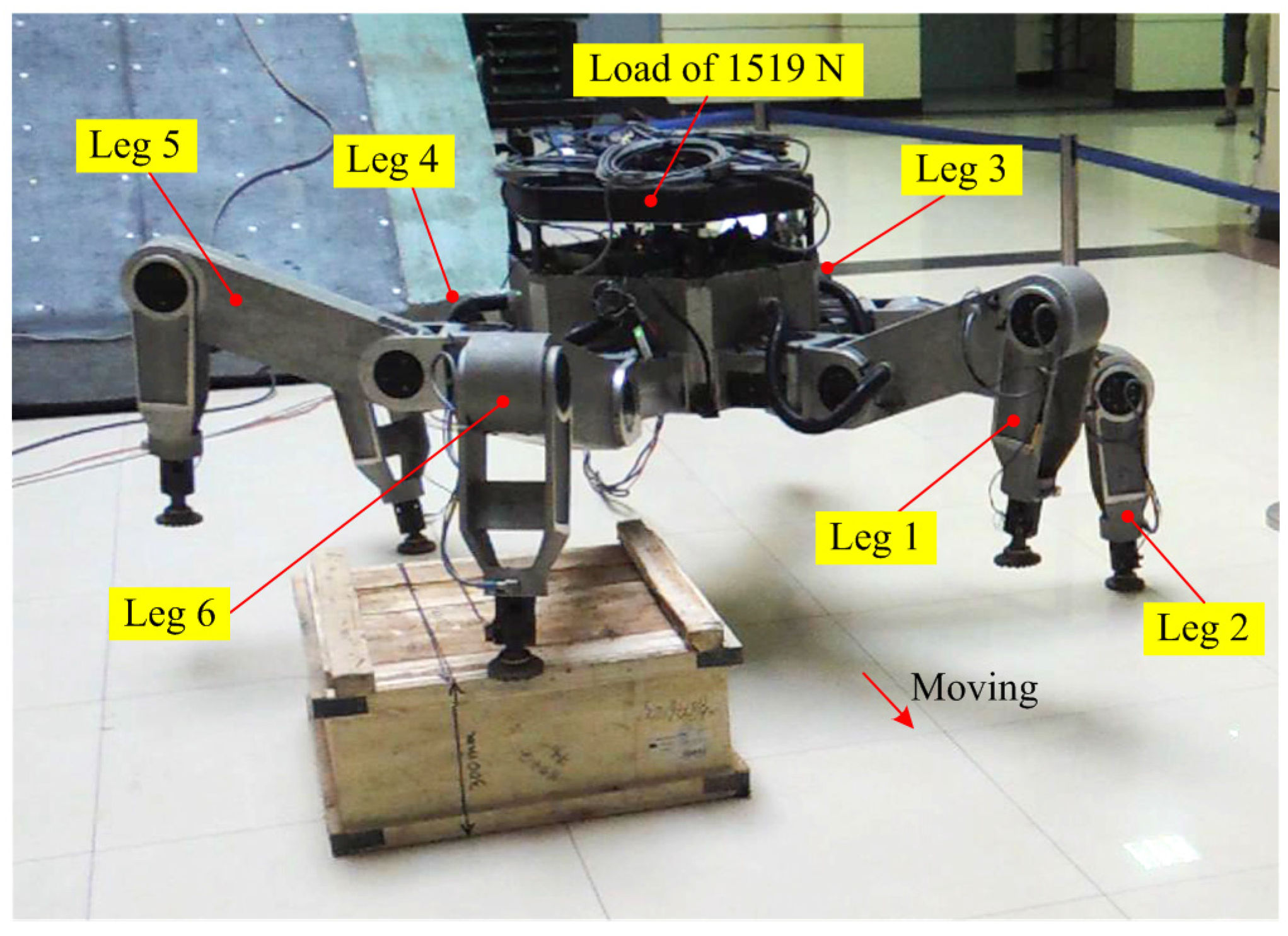
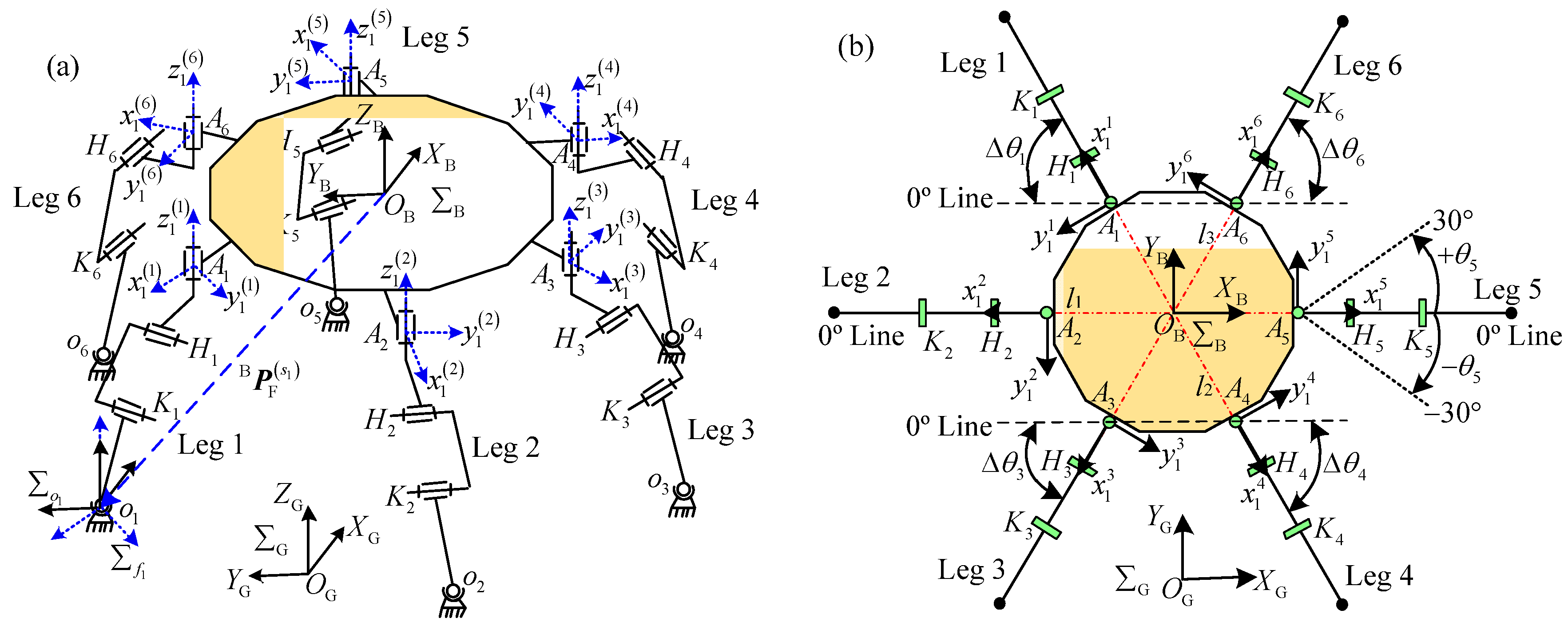
2.1. Configuration of the Large-Load-Ratio Six-Legged Robot
2.2. Typical Gait of the Large-Load-Ratio Six-Legged Robot
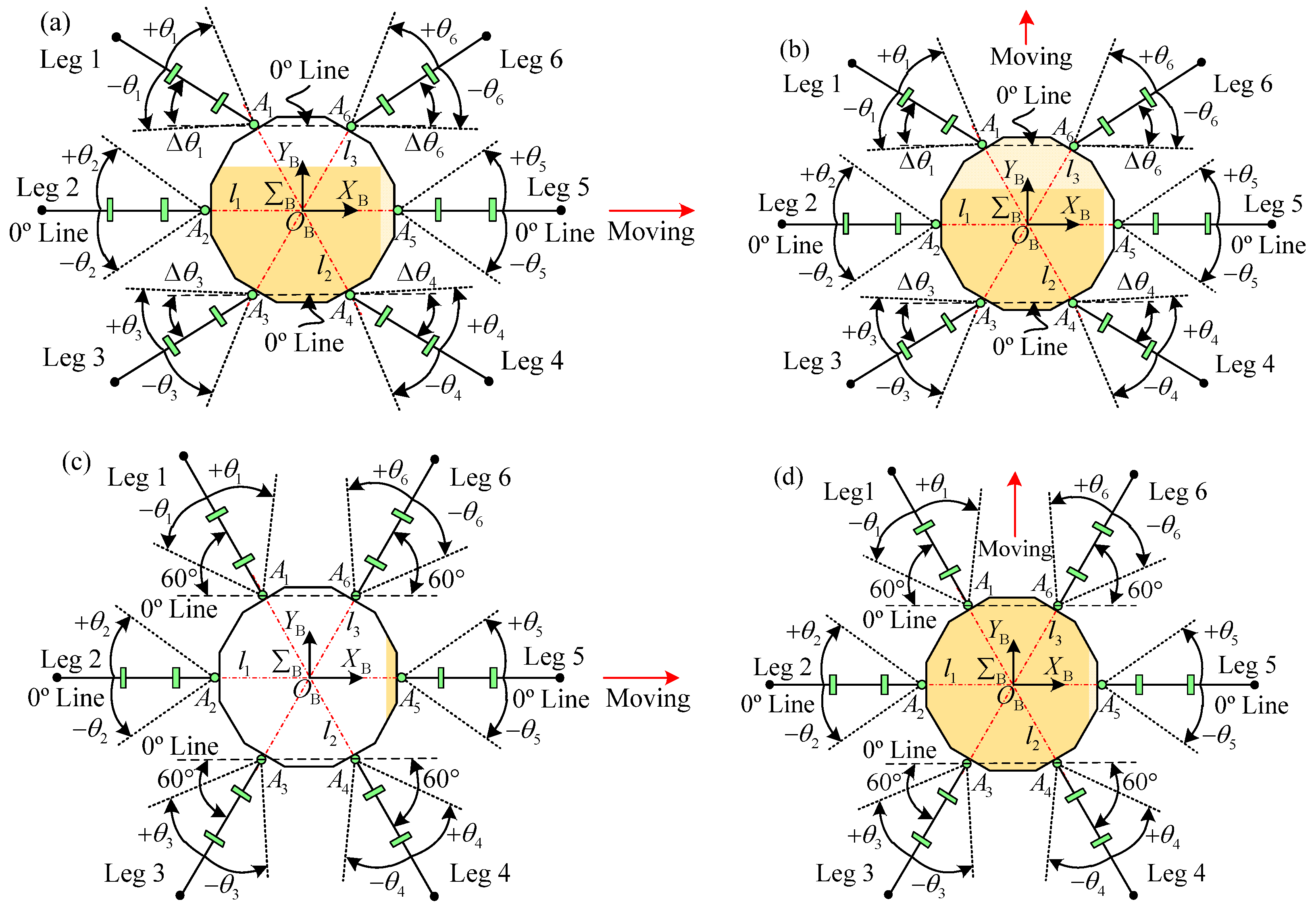
2.3. Walking Modes of the Large-Load-Ratio Six-Legged Robot
3. Kinematics Analysis of the Large-Load-Ratio Six-Legged Robot
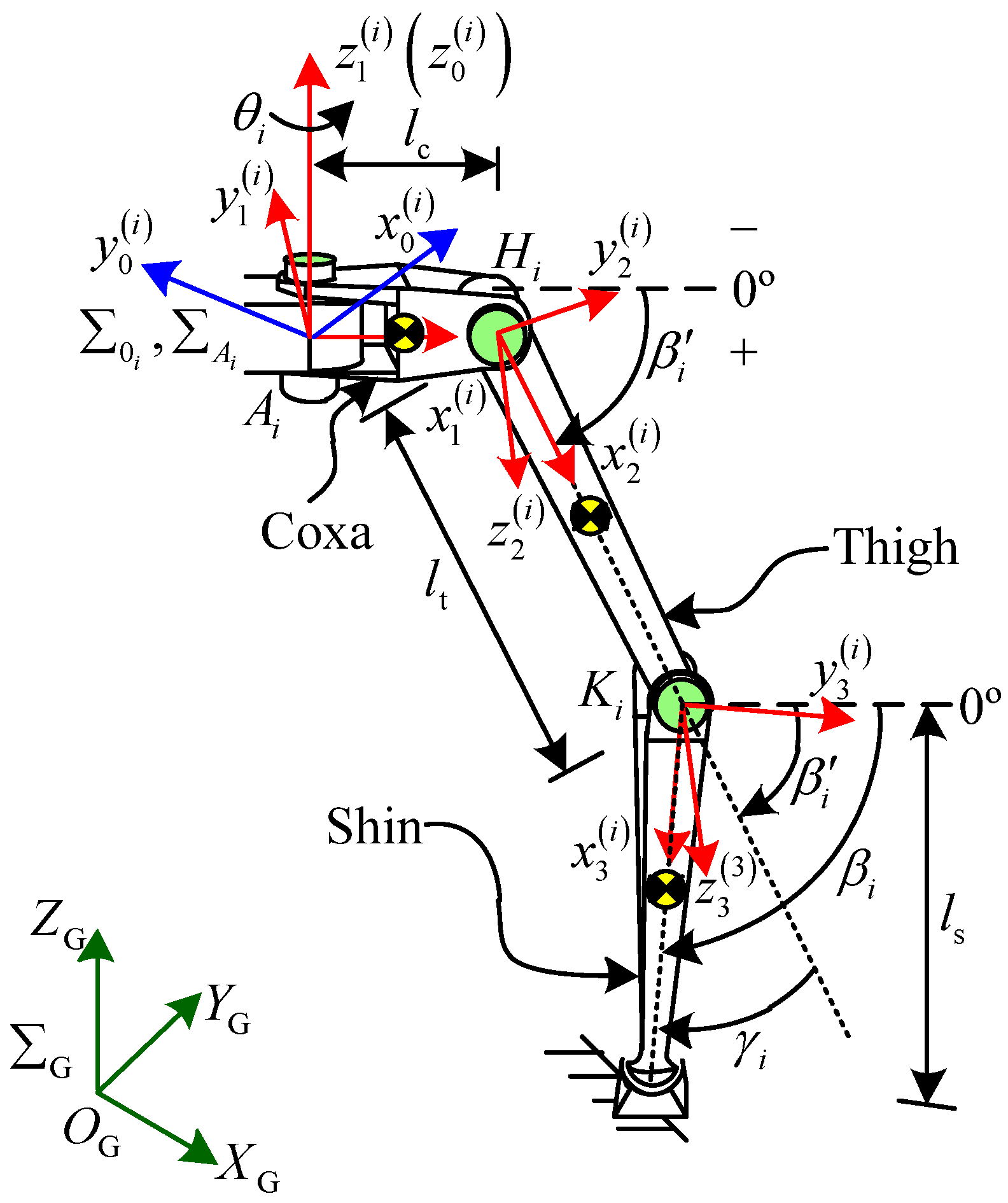
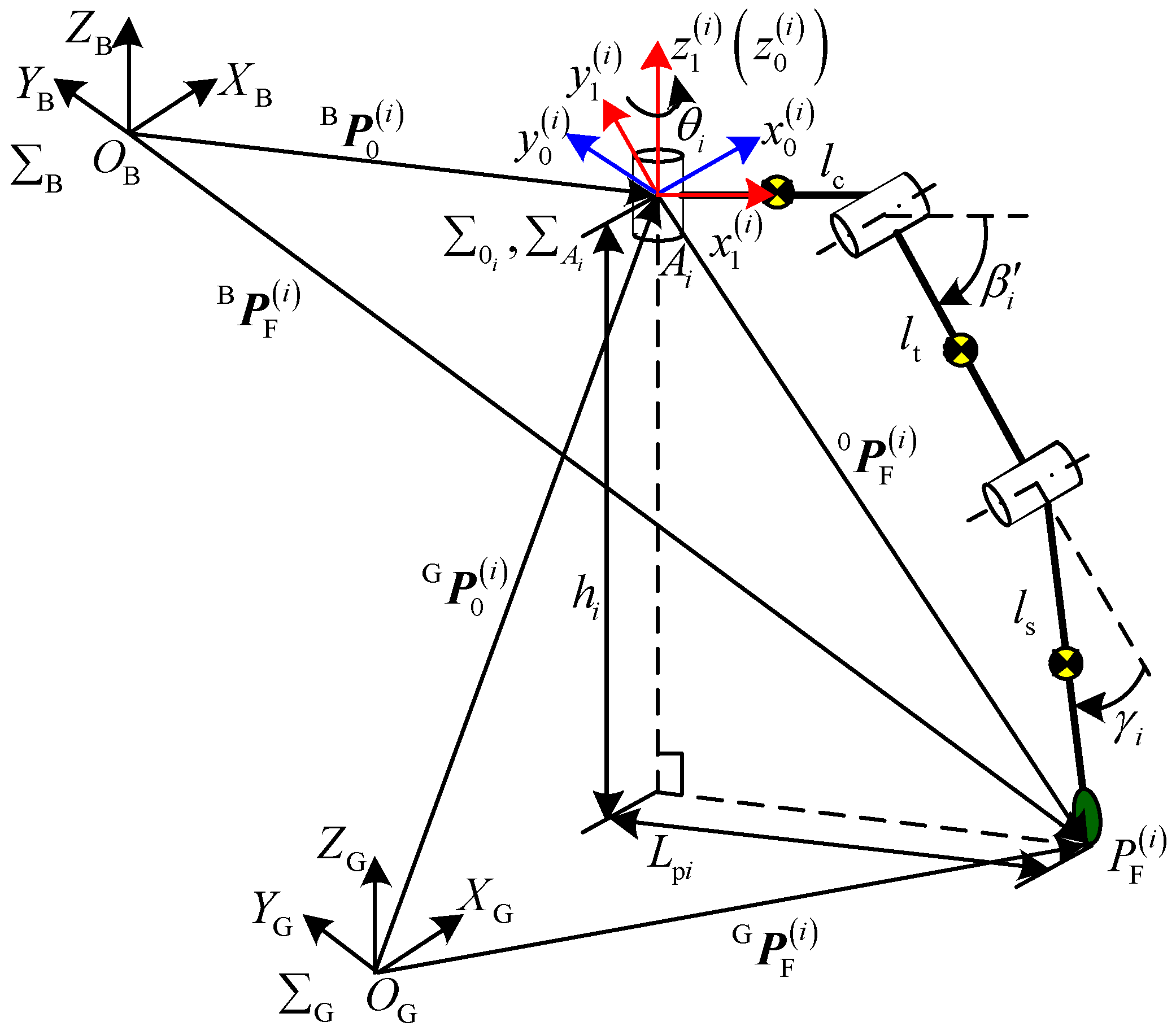
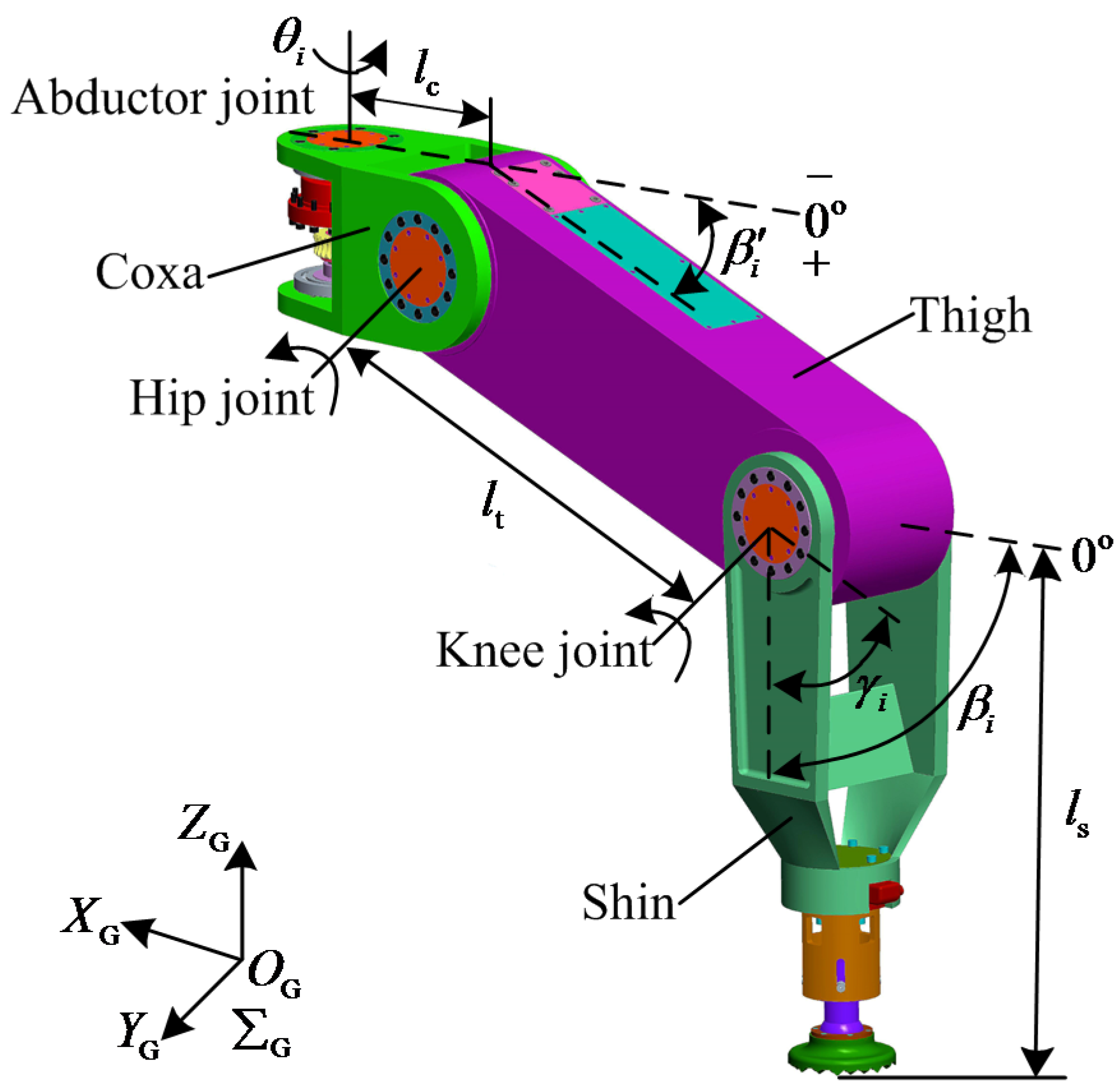
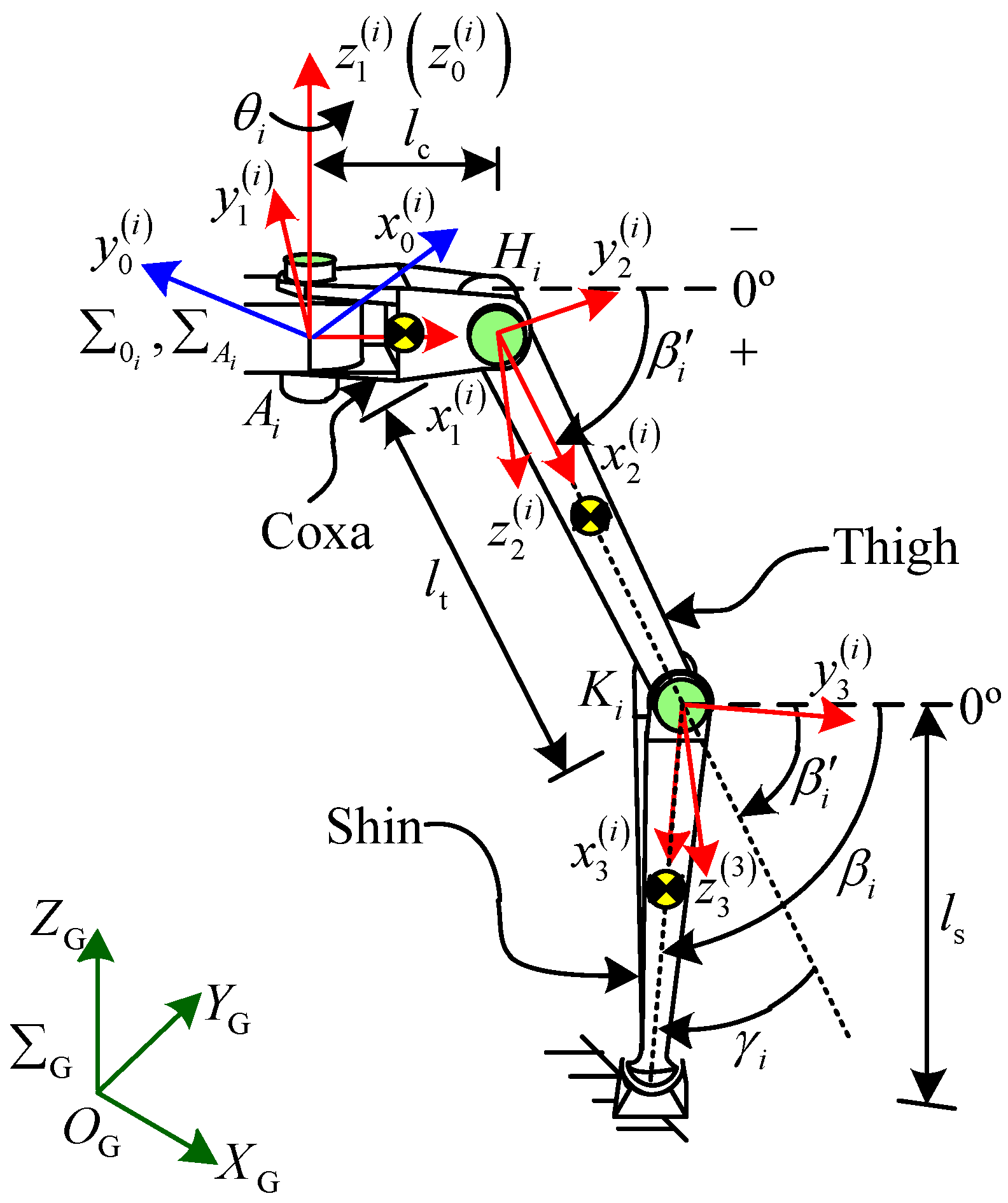
3.1. D-H Model of the Robot Single Leg
3.2. Forward Kinematics Analysis of the Large-Load-Ratio Six-Legged Robot
3.3. Inverse Kinematics Analysis of the Large-Load-Ratio Six-Legged Robot
4. Gait Planning of the Large-Load-Ratio Six-Legged Robot
4.1. Motion Planning of the Tripod Gait
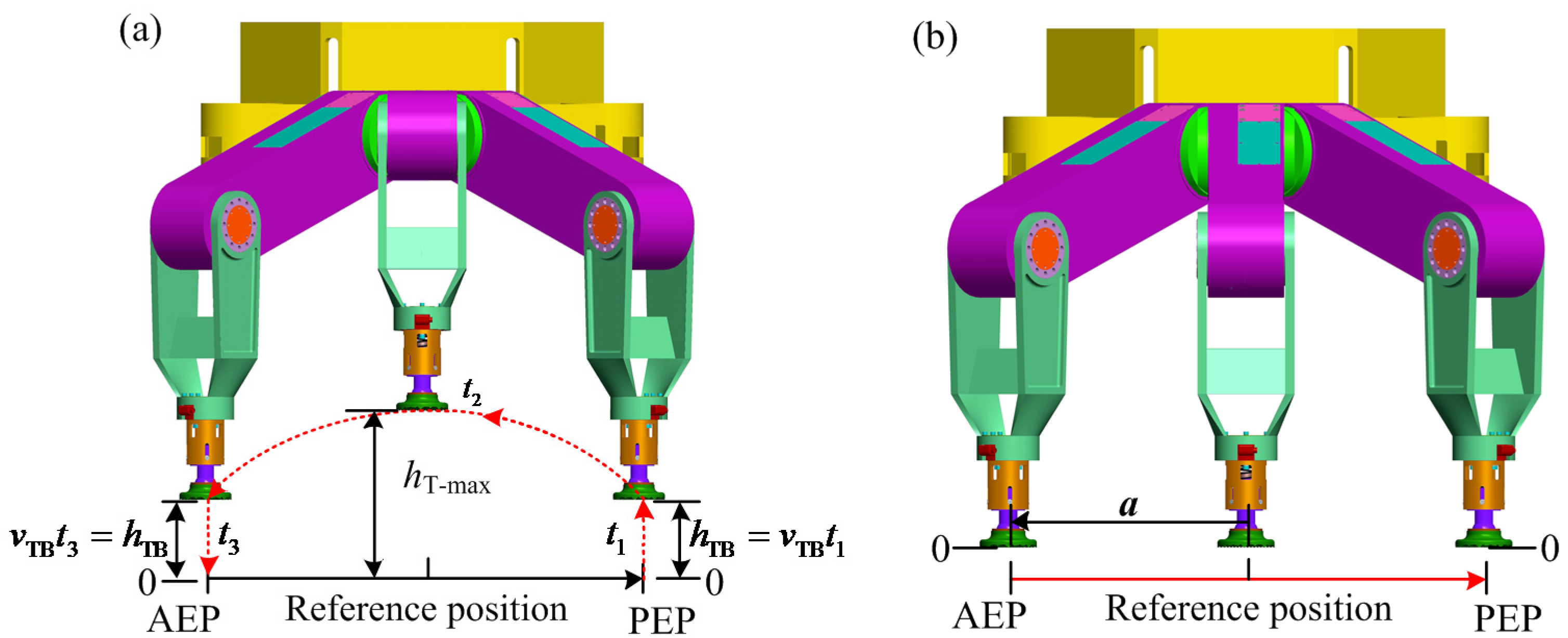
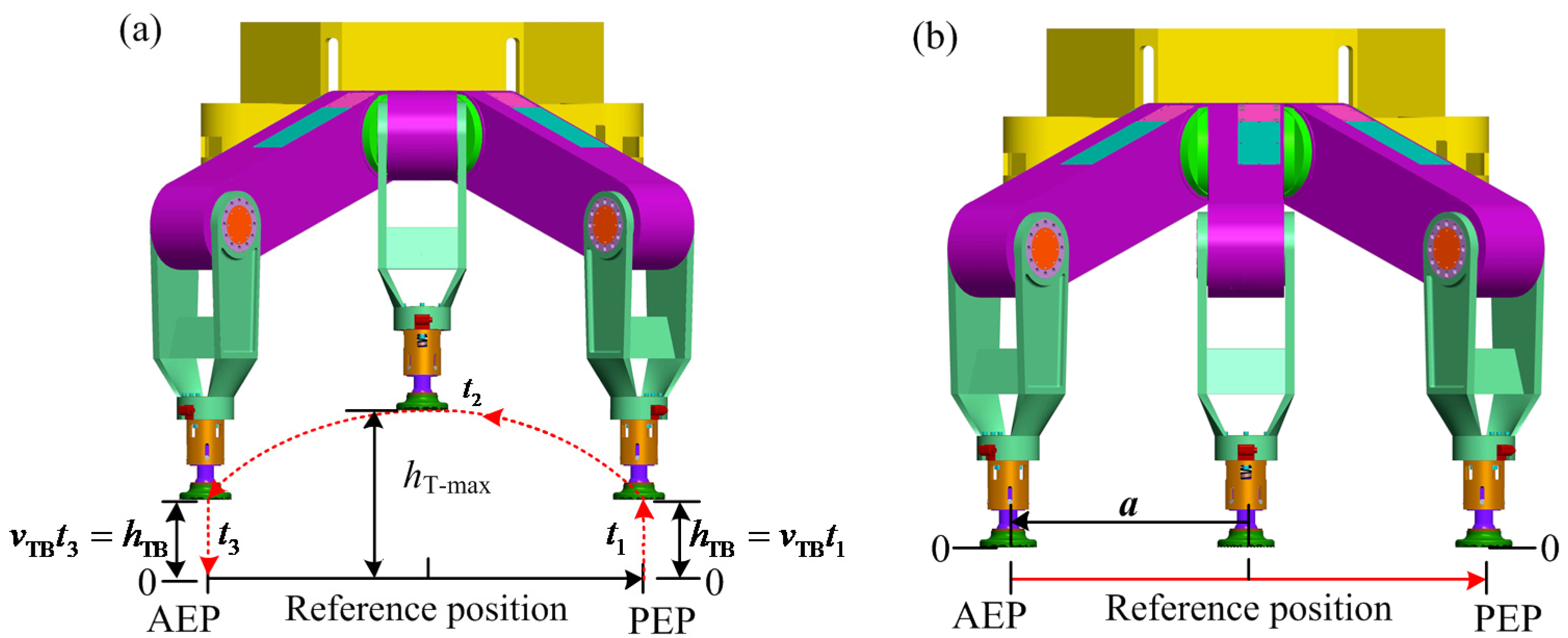
4.1.1. Motion Planning of the Transfer Phase
4.1.2. Motion Planning of the Support Phase
4.2. Motion Planning of the Quadrangular Gait
4.3. Motion Planning of the Pentagon Gait
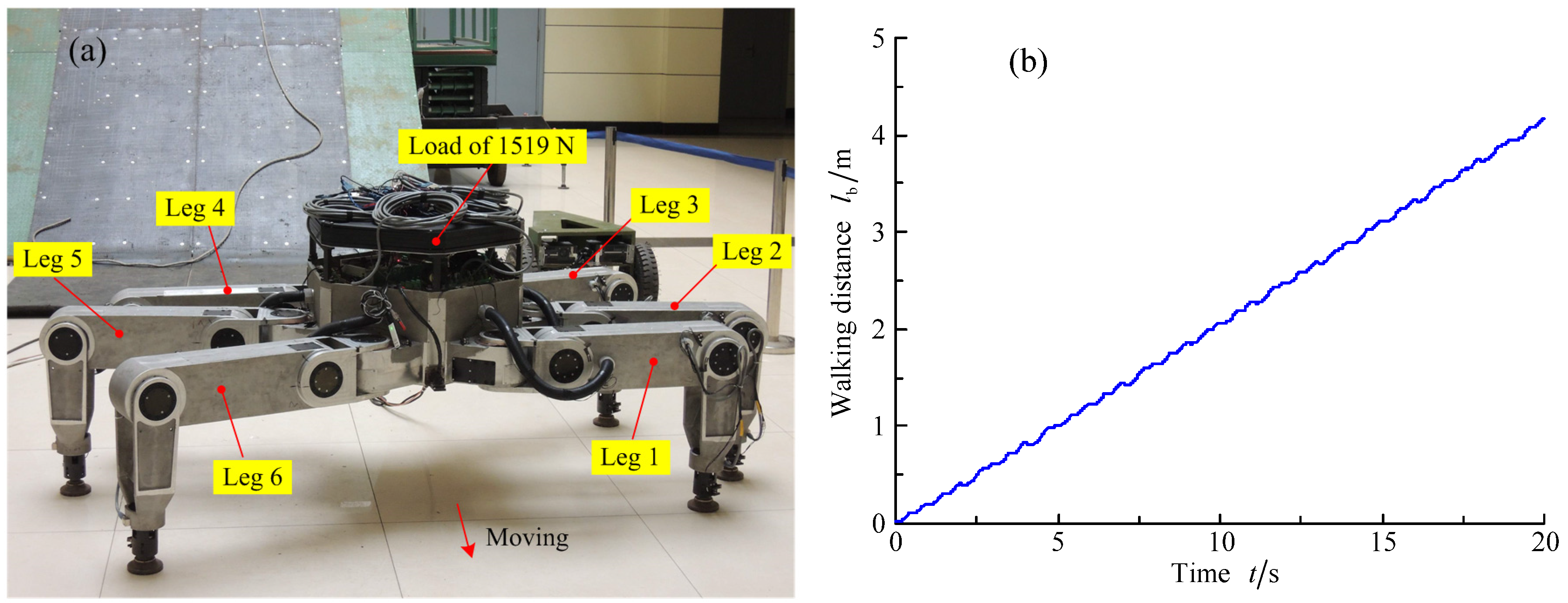
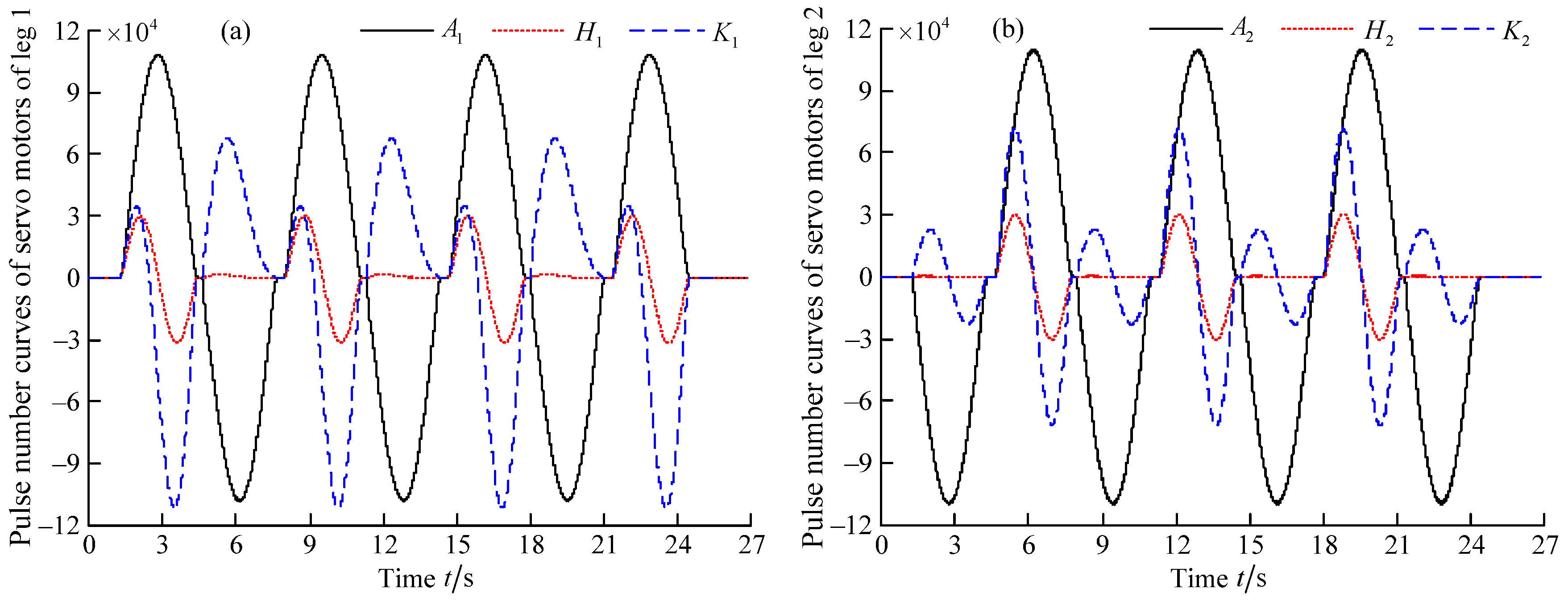
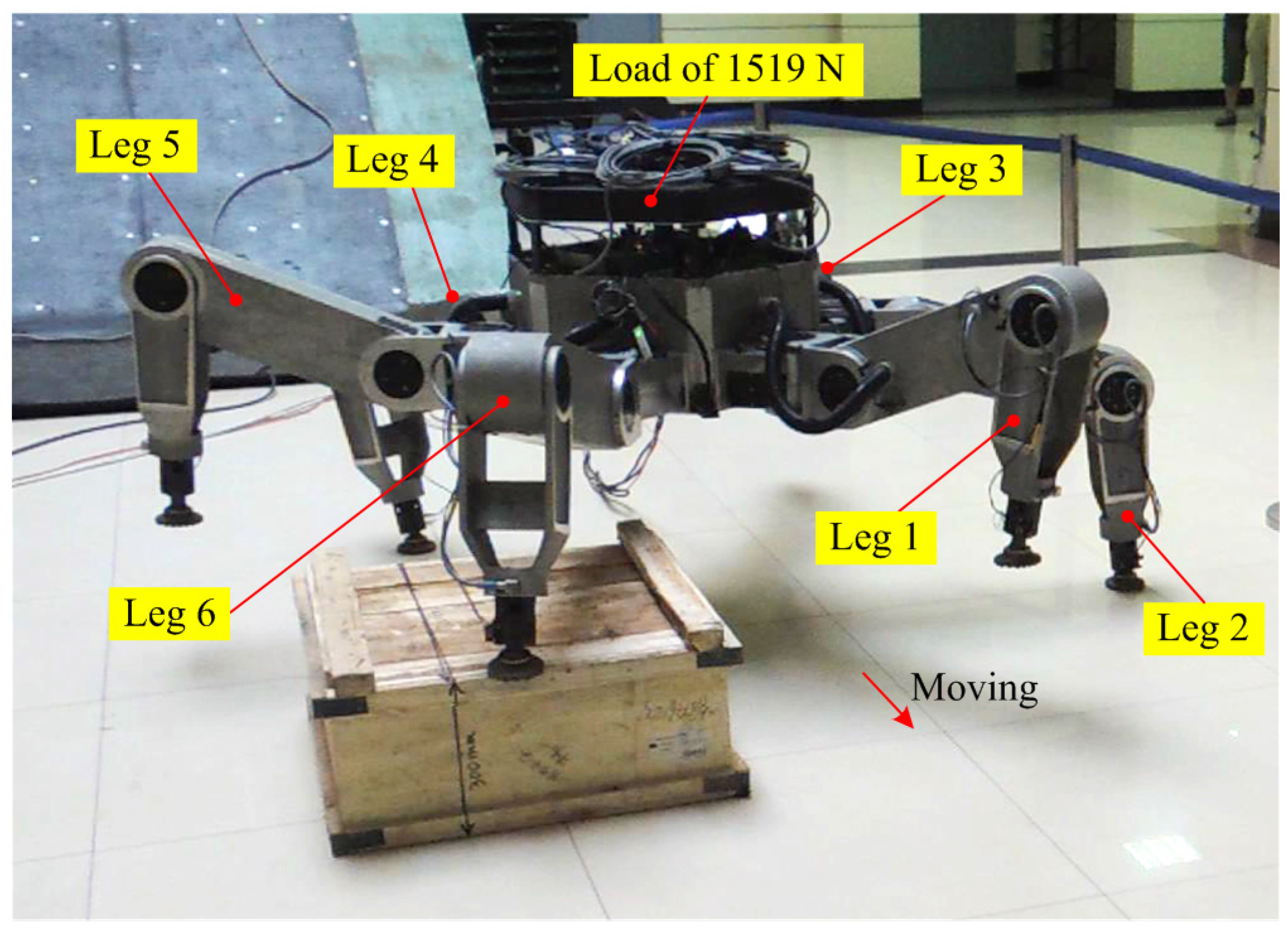
5. Applications and Experiments
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Raibert, M.; Blankespoor, K.; Nelson, G.; Playter, R.; the BigDog Team. BigDog, the rough-terrain quadruped robot. In Proceedings of the 17th World Congress on the International Federation of Automatic Control, Seoul, Korea, 6–11 July 2008; pp. 10822–10825.
- Playter, R.; Buehler, M.; Raibert, M. BigDog. In Proceedings of the International Society for Optical Engineering, Bellingham, WA, USA, 1–6 January 2006.
- Irawan, A.; Nonami, K. Optimal impedance control based on body inertia for a hydraulically driven hexapod robot walking on uneven and extremely soft terrain. J. Field Robot. 2011, 28, 690–713. [Google Scholar] [CrossRef]
- Irawan, A.; Nonami, K.; Ohroku, H.; Akutsu, Y.; Imamura, S. Adaptive impedance control with compliant body balance for hydraulically driven hexapod robot. J. Syst. Des. Dyn. 2011, 5, 893–908. [Google Scholar] [CrossRef]
- SunSpiral, V.; Wheeler, D.W.; Chavez-Clemente, D.; Mittman, D. Development and field testing of the footfall planning system for the ATHLETE robots. J. Field Robot. 2012, 29, 483–505. [Google Scholar] [CrossRef]
- Wilcox, B.H.; Litwin, T.E.; Biesiadecki, J.J.; Matthews, J.; Heverly, M.; Morrison, J.; Townsend, J.; Ahmad, N.; Sirota, A.; Cooper, B. ATHLETE: A cargo handling and manipulation robot for the moon. J. Field Robot. 2007, 24, 421–434. [Google Scholar] [CrossRef]
- Erden, M.S.; Leblebicioğlu, K. Free gait generation with reinforcement learning for a six-legged robot. Robot. Auton. Syst. 2008, 56, 199–212. [Google Scholar] [CrossRef]
- Erden, M.S.; Leblebicioǧlu, K. Analysis of wave gaits for energy efficiency. Auton. Robot. 2007, 23, 213–230. [Google Scholar]
- Ishikawa, T.; Makino, K.; Imani, J.; Ohyama, Y. Gait motion planning for a six legged robot based on the associatron. J. Adv. Comput. Intell. Intell. Inform. 2014, 18, 135–139. [Google Scholar]
- Estremera, J.; Cobano, J.A.; de Santos, P.G. Continuous free–crab gaits for hexapod robots on a natural terrain with forbidden zones: An application to humanitarian demining. Robot. Auton. Syst. 2010, 58, 700–711. [Google Scholar] [CrossRef] [Green Version]
- Satzinger, B.W.; Lau, C.; Byl, M.; Byl, K. Tractable locomotion planning for RoboSimian. Int. J. Robot. Res. 2015, 34, 1541–1558. [Google Scholar] [CrossRef]
- Fielding, M.R.; Dunlop, G.R. Omnidirectional hexapod walking and efficient gaits using restrictedness. Int. J. Robot. Res. 2004, 23, 1105–1110. [Google Scholar] [CrossRef]
- Tedeschi, F.; Carbone, G. Hexapod walking robot locomotion. In Motion and Operation Planning of Robotic Systems, 1st ed.; Carbone, G., Gomez-Bravo, F., Eds.; Springer: Cham, Switzerland, 2015; Volume 29, pp. 439–468. [Google Scholar]
- Tedeschi, F.; Carbone, G. Design of hexapod walking robots: Background and challenges. In Handbook of Research on Advancements in Robotics and Mechatronics, 1st ed.; Habib, M.K., Ed.; Idea Group: Hershey, PA, USA, 2014; Volume 2, pp. 527–566. [Google Scholar]
- Sadati, N.; Dumont, G.A.; Hamed, K.A.; Gruver, W.A. Hybrid Control and Motion Planning of Dynamical Legged Locomotion, 1st ed.; Wiley-IEEE Press: Hoboken, NJ, USA, 2012; pp. 95–217. [Google Scholar]
- Zhuang, H.C.; Gao, H.B.; Deng, Z.Q.; Ding, L.; Liu, Z. Method for analyzing articulated rotating speeds of heavy-duty six-legged robot. J. Mech. Eng. 2013, 49, 44–52. [Google Scholar] [CrossRef]
- Gao, H.B.; Zhuang, H.C.; Li, Z.G.; Deng, Z.Q.; Ding, L.; Liu, Z. Optimization and experimental research on a new-type short cylindrical cup-shaped harmonic reducer. J. Cent. South Univ. Technol. 2012, 19, 1869–1882. [Google Scholar] [CrossRef]
- Zhuang, H.C.; Gao, H.B.; Deng, Z.Q.; Ding, L.; Liu, Z. A review of heavy-duty legged robots. Sci. China Technol. Sci. 2014, 57, 298–314. [Google Scholar] [CrossRef]
- Zhuang, H.C.; Gao, H.B.; Deng, Z.Q. Analysis method of articulated torque of heavy-duty six-legged robot under its quadrangular gait. Appl. Sci. 2016, 6, 1–21. [Google Scholar] [CrossRef]
- Jun, N.S. Legged insects select the optimal locomotor pattern based on the energetic cost. Biol. Cybern. 2000, 83, 435–442. [Google Scholar]
- Lin, B.S.; Song, S.M. Dynamic modeling, stability, and energy efficiency of a quadrupedal walking machine. J. Robot. Syst. 2001, 18, 657–670. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Duty Ratio βR | Number (u) of Legs in Support Phase | Gait | Support Time (Ts) between Legs of Support Phase | Walking Speed vR |
|---|---|---|---|---|
| βR = 1/2 | 3 | Tripod Gait | Equality | vR = 2s/T |
| βR = 2/3 | 4 | Quadrangular Gait | Equality | vR = 3s/2T |
| βR = 5/6 | 5 | Pentagon Gait | Equality | vR = 6s/5T |
| βR = 1 | 6 | Stationary State | Equality | 0 |
| No. | Phase | 1/3 Gait Legs | 2/3 Gait Legs | 3/3 Gait Legs | No. | Phase | 1/3 Gait Legs | 2/3 Gait Legs | 3/3 Gait Legs |
|---|---|---|---|---|---|---|---|---|---|
| 1 | Transfer | 2, 5 | 3, 6 | 1, 4 | 10 | Transfer | 1, 5 | 2, 4 | 3, 6 |
| Support | 1, 3, 4, 6 | 1, 2, 4, 5 | 2, 3, 5, 6 | Support | 2, 3, 4, 6 | 1, 3, 5, 6 | 1, 2, 4, 5 | ||
| 2 | Transfer | 2, 4 | 3, 6 | 1, 5 | 11 | Transfer | 1, 5 | 3, 6 | 2, 4 |
| Support | 1, 3, 5, 6 | 1, 2, 4, 5 | 2, 3, 4, 6 | Support | 2, 3, 4, 6 | 1, 2, 4, 5 | 1, 3, 5, 6 | ||
| 3 | Transfer | 2, 4 | 1, 5 | 3, 6 | 12 | Transfer | 1, 4 | 2, 5 | 3, 6 |
| Support | 1, 3, 5, 6 | 2, 3, 4, 6 | 1, 2, 4, 5 | Support | 2, 3, 5, 6 | 1, 3, 4, 6 | 1, 2, 4, 5 | ||
| 4 | Transfer | 3, 6 | 2, 5 | 1, 4 | 13 | Transfer | 1, 4 | 2, 6 | 3, 5 |
| Support | 1, 2, 4, 5 | 1, 3, 4, 6 | 2, 3, 5, 6 | Support | 2, 3, 5, 6 | 1, 3, 4, 5 | 1, 2, 4, 6 | ||
| 5 | Transfer | 3, 6 | 2, 4 | 1, 5 | 14 | Transfer | 1, 4 | 3, 6 | 2, 5 |
| Support | 1, 2, 4, 5 | 1, 3, 5, 6 | 2, 3, 4, 6 | Support | 2, 3, 5, 6 | 1, 2, 4, 5 | 1, 3, 4, 6 | ||
| 6 | Transfer | 3, 6 | 1, 5 | 2, 4 | 15 | Transfer | 1, 4 | 3, 5 | 2, 6 |
| Support | 1, 2, 4, 5 | 2, 3, 4, 6 | 1, 3, 5, 6 | Support | 2, 3, 5, 6 | 1, 2, 4, 6 | 1, 3, 4, 5 | ||
| 7 | Transfer | 3, 6 | 1, 4 | 2, 5 | 16 | Transfer | 2, 6 | 3, 5 | 1, 4 |
| Support | 1, 2, 4, 5 | 2, 3, 5, 6 | 1, 3, 4, 6 | Support | 1, 3, 4, 5 | 1, 2, 4, 6 | 2, 3, 5, 6 | ||
| 8 | Transfer | 3, 5 | 1, 4 | 2, 6 | 17 | Transfer | 2, 6 | 1, 4 | 3, 5 |
| Support | 1, 2, 4, 6 | 2, 3, 5, 6 | 1, 3, 4, 5 | Support | 1, 3, 4, 5 | 2, 3, 5, 6 | 1, 2, 4, 6 | ||
| 9 | Transfer | 3, 5 | 2, 6 | 1, 4 | 18 | Transfer | 2, 5 | 1, 4 | 3, 6 |
| Support | 1, 2, 4, 6 | 1, 3, 4, 5 | 2, 3, 5, 6 | Support | 1, 3, 4, 6 | 2, 3, 5, 6 | 1, 2, 4, 5 |
| Walking Way | ∆θi Changing form 0° to 60° | ∆θi = 60° | ||||||
|---|---|---|---|---|---|---|---|---|
| Legs 1, 3, 4, and 6 | Legs 2 and 5 | Legs 1, 3, 4, and 6 | Legs 2 and 5 | |||||
| Ai | Hi and Ki | Ai | Hi and Ki | Ai | Hi, Ki | Ai | Hi, Ki | |
| Crab type | From NC to MC vR | Form MC to AC vR | NC vR | MC vR | — | — | — | — |
| Ant type | MC vR | AC vR | MC vR | AC vR | — | — | — | — |
| Crab–ant mixed type I | — | — | — | — | MC vR | AC vR | NC vR | MC vR |
| Crab–ant mixed type II | — | — | — | — | MC vR | AC vR | MC vR | AC vR |
| Joint j | Linkage Length (mm) | Torsion Angle of Link (deg) | Linkage Offset (mm) | Rotation Angle of Link (deg) |
|---|---|---|---|---|
| 1 | 0 | 0° | 0 | θi |
| 2 | lc | 90° | 0 | βi′ |
| 3 | lt | 0° | 0 | γi |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuang, H.-C.; Gao, H.-B.; Deng, Z.-Q. Gait Planning Research for an Electrically Driven Large-Load-Ratio Six-Legged Robot. Appl. Sci. 2017, 7, 296. https://doi.org/10.3390/app7030296
Zhuang H-C, Gao H-B, Deng Z-Q. Gait Planning Research for an Electrically Driven Large-Load-Ratio Six-Legged Robot. Applied Sciences. 2017; 7(3):296. https://doi.org/10.3390/app7030296
Chicago/Turabian StyleZhuang, Hong-Chao, Hai-Bo Gao, and Zong-Quan Deng. 2017. "Gait Planning Research for an Electrically Driven Large-Load-Ratio Six-Legged Robot" Applied Sciences 7, no. 3: 296. https://doi.org/10.3390/app7030296
APA StyleZhuang, H.-C., Gao, H.-B., & Deng, Z.-Q. (2017). Gait Planning Research for an Electrically Driven Large-Load-Ratio Six-Legged Robot. Applied Sciences, 7(3), 296. https://doi.org/10.3390/app7030296