
A TSVD-Based Method for Forest Height Inversion from Single-Baseline PolInSAR Data


Abstract
:1. Introduction
2. RVoG Model
3. The TSVD-Based Method for the Estimation of Vegetation Height From Complex Interferometric Coherence Observations
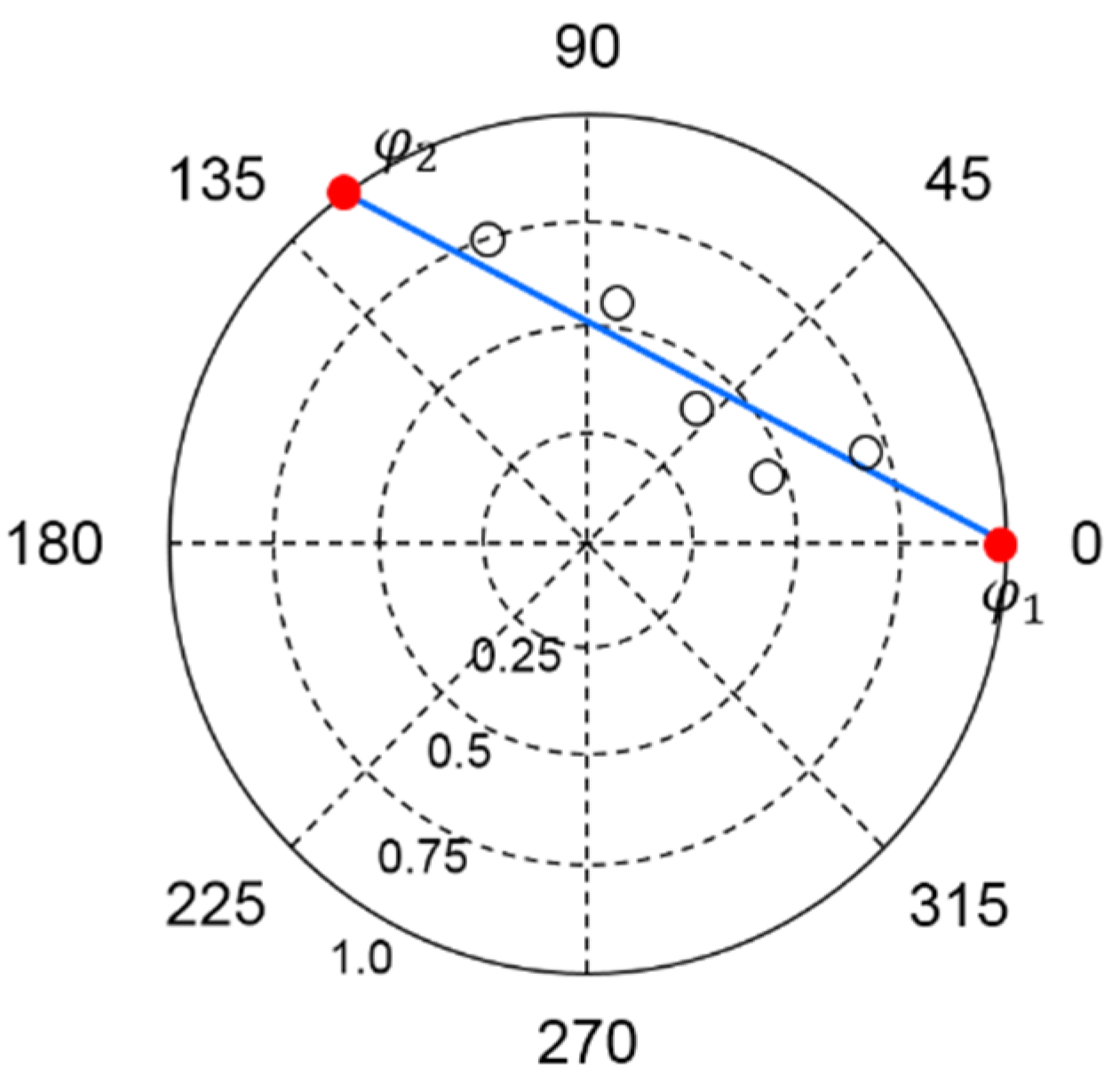
3.1. Estimation of Pure Volume Coherence from the Complex Interferometric Coherence Observations
3.2. Extraction of Vegetation Height from the Pure Volume Coherence
3.3. The Determination of Initial Values of Model Parameters
4. Examples
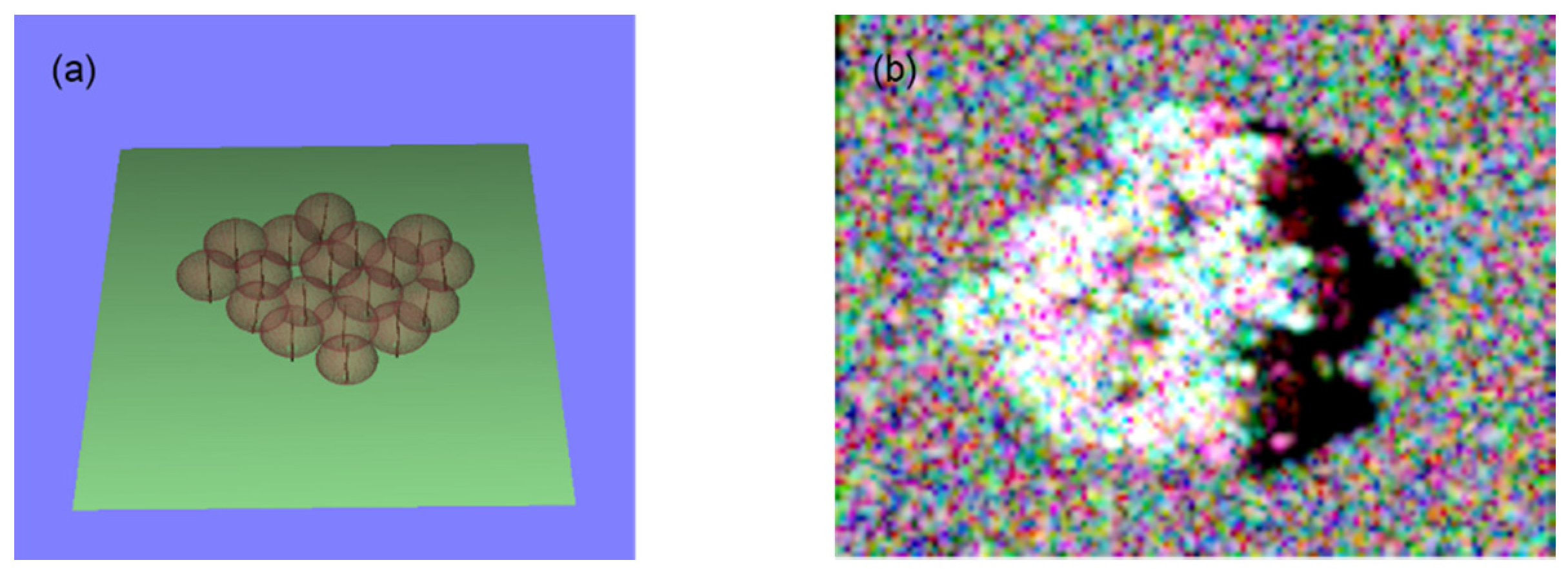
4.1. Simulated Experiments
4.2. Validation with E-SAR P-Band Data
4.2.1. Study Area and Data Sets
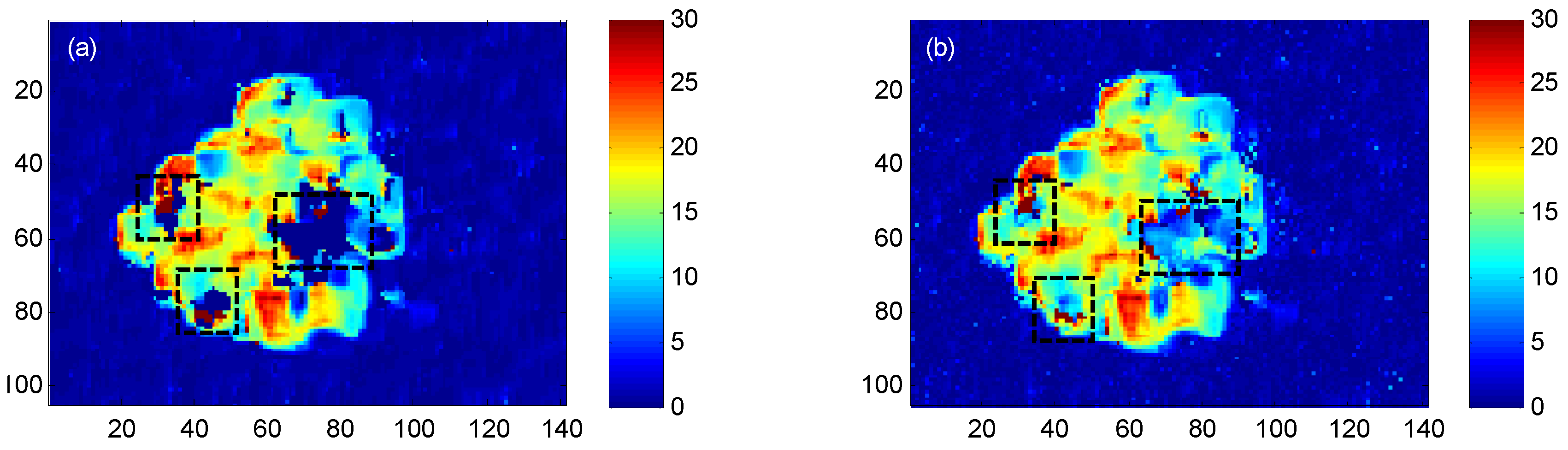
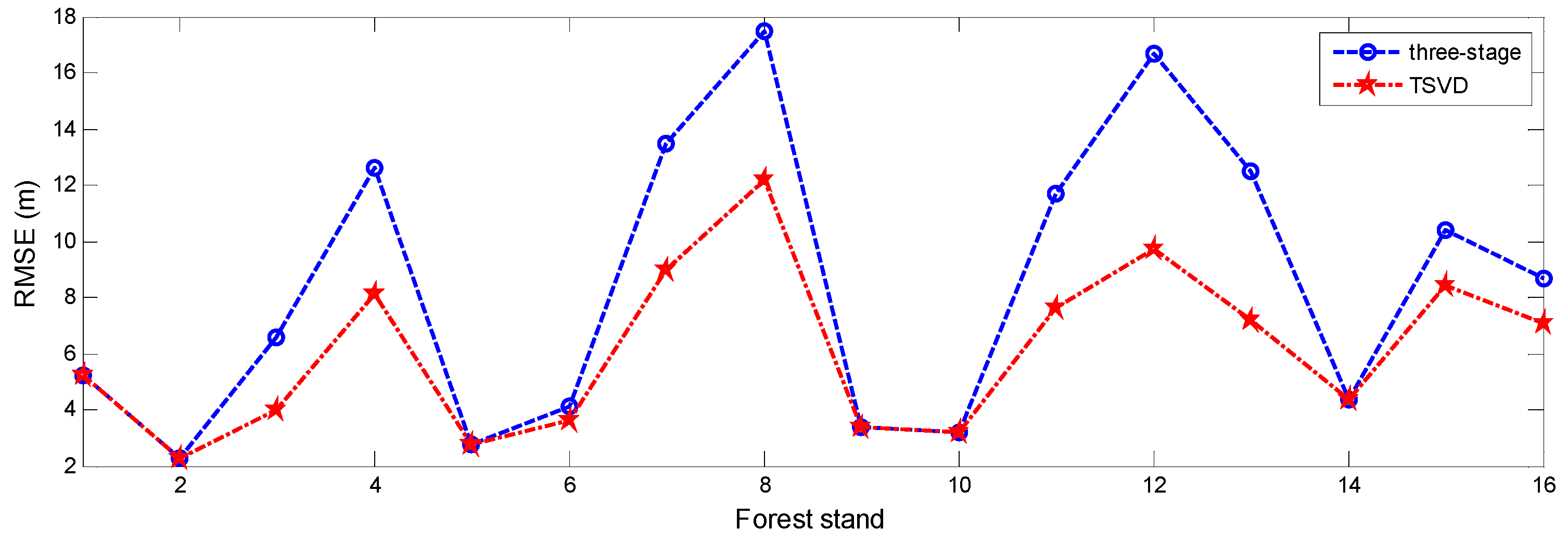
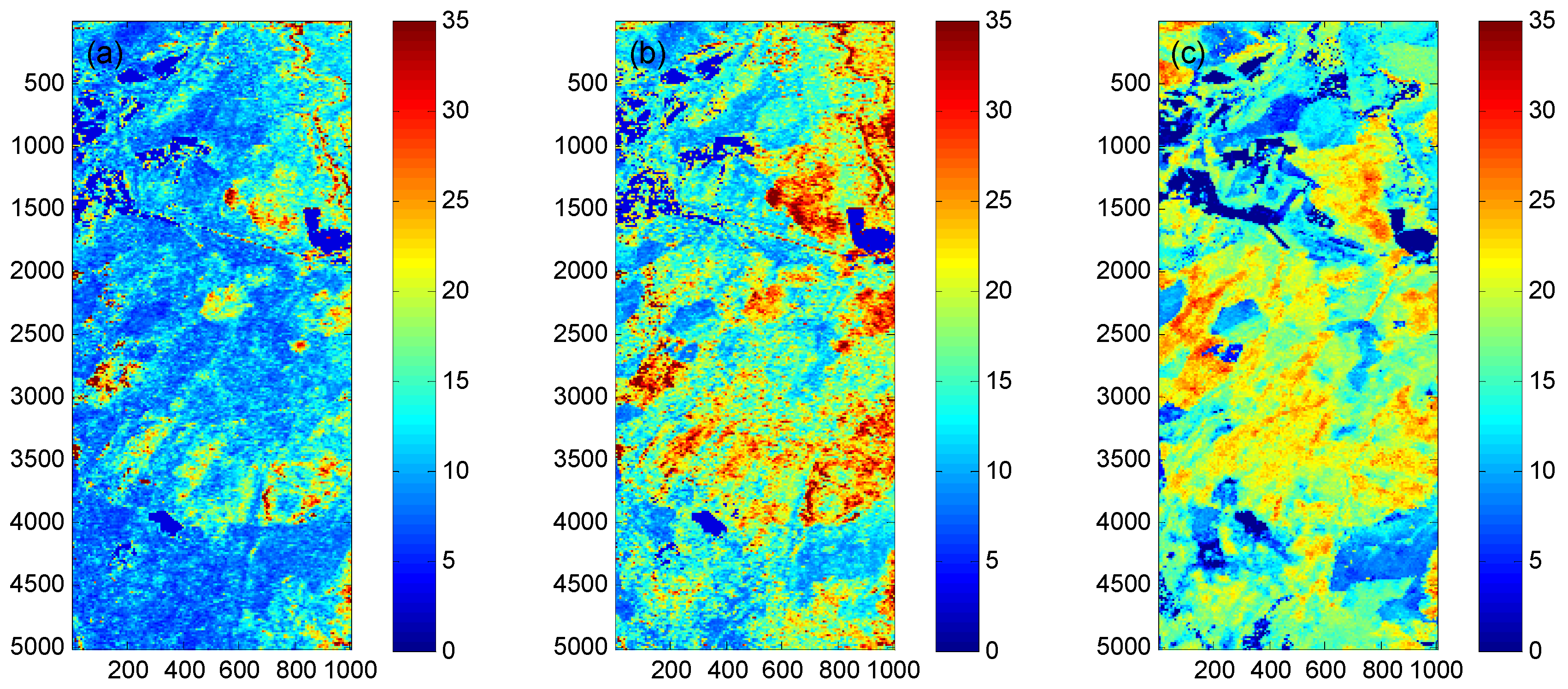
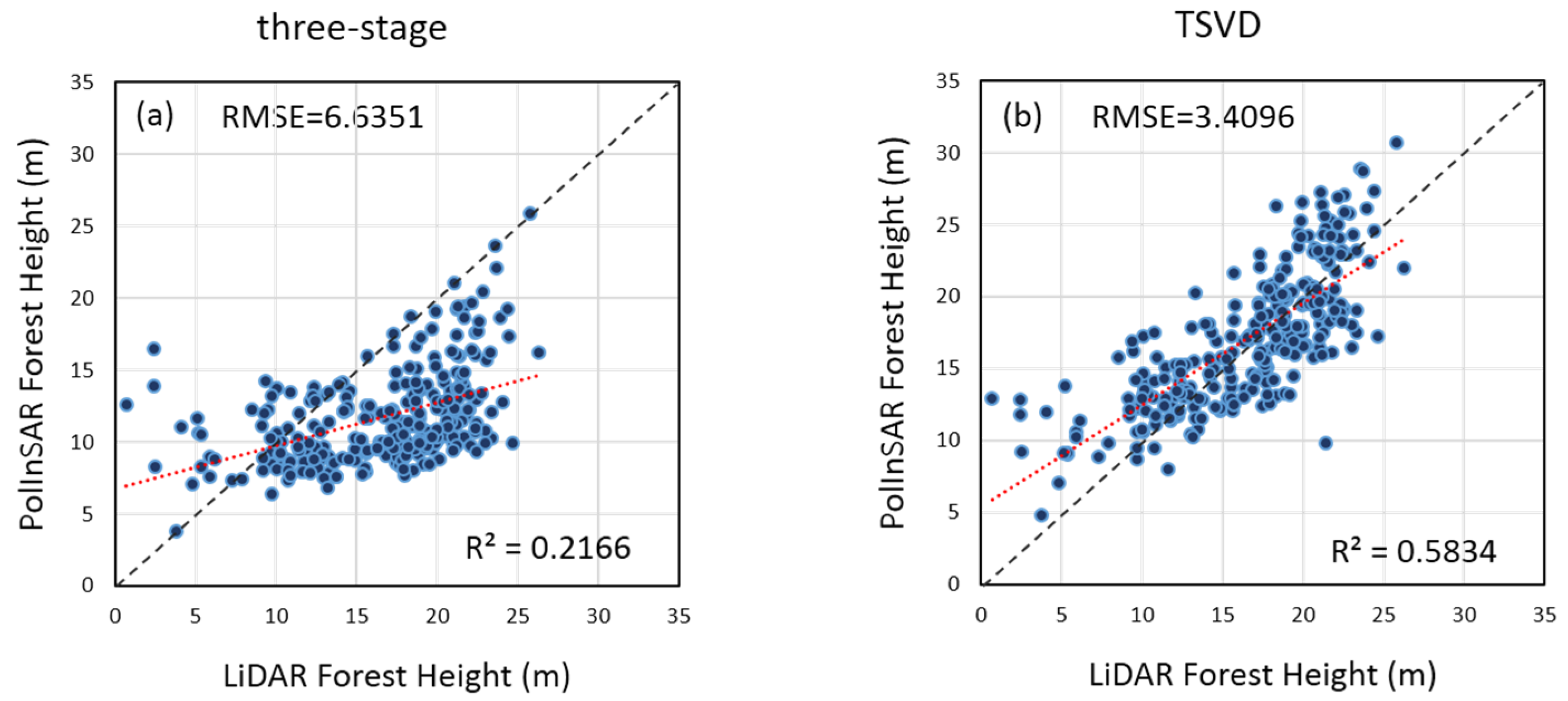
4.2.2. Forest Height Inversion
5. Discussion
5.1. The Extracted Ground Surface Phases by the Three-Stage Method and TSVD
5.2. Effects on Estimation of Phase Height
5.3. Limitations of the TSVD-Based Method
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Balzter, H.; Rowland, C.S.; Saich, P. Forest canopy height and carbon estimation at Monks Wood National Nature Reserve, UK, using dual-wavelength SAR interferometry. Remote Sens. Environ. 2007, 108, 224–239. [Google Scholar] [CrossRef]
- Gama, F.F.; dos Santos, J.R.; Mura, J.C. Eucalyptus biomass and volume estimation using interferometric and polarimetric SAR data. Remote Sens. 2010, 2, 939–956. [Google Scholar] [CrossRef]
- Luo, H.M.; Li, X.W.; Chen, E.; Cheng, J.; Cao, C. Analysis of forest backscattering characteristics based on polarization coherence tomography. Sci. China Technol. Sci. 2011, 53, 166–175. [Google Scholar] [CrossRef]
- Neumann, M.; Ferro-Famil, L.; Reigber, A. Estimation of forest structure, ground, and canopy layer characteristics from multibaseline polarimetric interferometric SAR data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1086–1104. [Google Scholar] [CrossRef]
- Cloude, S.R.; Papathanassiou, K.P. Polarimetric SAR interferometry. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1551–1565. [Google Scholar] [CrossRef]
- Papathanassiou, K.P.; Cloude, S.R. Single-baseline polarimetric SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2352–2363. [Google Scholar] [CrossRef]
- Kugler, F.; Schulze, D.; Hajnsek, I.; Pretzsch, H.; Papathanassiou, K.P. Tan DEM-X Pol-InSAR performance for forest height estimation. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6404–6422. [Google Scholar] [CrossRef]
- Garestier, F.; Dubois-Fernandez, P.C.; Papathanassiou, K.P. Pine forest height inversion using single-pass X-band PolInSAR data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 56–68. [Google Scholar] [CrossRef]
- Garestier, F.; Toan, T.L. Forest modeling for height inversion using single baseline InSAR/PolIn SAR data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1528–1539. [Google Scholar] [CrossRef]
- Cloude, S.R. Polarisation: Applications in Remote Sensing; Oxford University Press: New York, NY, USA, 2009. [Google Scholar]
- Treuhaft, R.N.; Madsen, S.N.; Moghaddam, M.; Zyl, J.J.V. Vegetation characteristics and underlying topography from interferometric data. Radio Sci. 1996, 31, 1449–1495. [Google Scholar] [CrossRef]
- Treuhaft, R.N.; Siqueira, P.R. Vertical structure of vegetated land surfaces from interferometric and polarimetric data. Radio Sci. 2000, 35, 141–177. [Google Scholar] [CrossRef]
- Garestier, F.; Toan, T.L. Estimation of the backscatter vertical profile of a pine forest using single baseline P-band (Pol-) InSAR data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3340–3348. [Google Scholar] [CrossRef]
- Garestier, F.; Dubois-Fernandez, P.C.; Champion, I. Forest height inversion using high resolution P-band Pol-InSAR data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3544–3559. [Google Scholar] [CrossRef]
- Parks, J.; Kugler, F.; Papathanassiou, K.P.; Hajnsek, I.; Hallikainen, M. Height estimation of boreal forest: Interferometric model-based inversion at L- and X-band versus HUTSCAT profiling scatterometer. IEEE Geosci. Remote Sens. Lett. 2007, 4, 466–470. [Google Scholar] [CrossRef]
- Li, X.W.; Guo, H.D.; Liao, J.J.; Wang, C.L.; Yan, F.L. Inversion of vegetation parameters using spaceborne polarimetric SAR interferometry. J. Remote Sens. 2002, 6, 424–429. [Google Scholar]
- Ballester-Berman, J.D.; Vicente-Guijalba, F.; Lopez-Sanchez, J.M. A simple RVoG test for PolInSAR data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1028–1040. [Google Scholar] [CrossRef]
- Cloude, S.R.; Papathanassiou, K.P. Three-stage inversion process for polarimetric SAR interferometry. IEE Proc. Radar Sonar Navig. 2003, 150, 125–134. [Google Scholar] [CrossRef]
- Chen, E.X.; Li, Z.Y.; Pang, Y.; Tian, X. Polarimetric synthetic aperture radar interferometry based mean tree height extraction technique. Sci. Silvae Sin. 2007, 43, 66–70. [Google Scholar]
- Fu, H.Q.; Wang, C.C.; Zhu, J.J.; Xie, Q.H.; Zhao, R. Inversion of forest height from PolInSAR using complex least squares adjustment method. Sci. China Earth Sci. 2015, 58, 1018–1031. [Google Scholar] [CrossRef]
- Small, D. Generation of Digital Elevation Models through Spaceborne SAR Interferometry. Ph.D. Thesis, University of Zurich, Zurich, Switzerland, 1998. [Google Scholar]
- Lavalle, M.; Khun, K. Three-baseline InSAR estimation of forest height. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1737–1741. [Google Scholar] [CrossRef]
- Cui, X.; Yu, Z.; Tao, B.; Liu, D.; Yu, Z.; Sun, H.; Wang, X. Generalized Surveying Adjustment, 2nd ed.; Wuhan University Press: Wuhan, China, 2009. [Google Scholar]
- Lin, D.; Zhu, J.; Song, Y.; He, Y. Construction method of regularization by singular value decomposition of design matrix. Acta Geodaetica et Cartographica Sinica 2016, 45, 883–889. [Google Scholar]
- Tabb, M.; Orrey, J.; Flynn, T. Phase Diversity: An optimal decomposition for vegetation parameter estimation using polarimetric SAR interferometry. Proceeding of the 4th European Conference on Synthetic Aperture Radar, Köln, Germany, 2–4 June 2002; pp. 721–724. [Google Scholar]
- Xu, P.L. Truncated SVD methods for discrete linear ill-posed problems. Geophys. J. Int. 1998, 135, 505–514. [Google Scholar] [CrossRef]
- Hansen, P.C. The truncated SVD as a method for regularization. BIT Numer. Math. 1987, 27, 534–553. [Google Scholar] [CrossRef]
- Reichel, L.; Rodriguez, G. Old and new parameter choice rules for discrete ill-posed problems. Numer. Algorithms 2013, 63, 65–87. [Google Scholar] [CrossRef]
- Zhu, J.J.; Xie, Q.H.; Zuo, T.Y.; Wang, C.C.; Xie, J. Criterion of complex least squares adjustment and its application in tree inversion with PolInSAR data. Acta Geod. Cartogr. Sin. 2014, 43, 45–51. [Google Scholar]
- Lopez-Martinez, C.; Papathanassiou, K.P. Cancellation of scattering mechanisms in PolInSAR: Application to underlying topography estimation. IEEE Trans. Geosci. Remote Sens. 2013, 51, 953–965. [Google Scholar] [CrossRef]
- Wang, C.C.; Wang, L.; Fu, H.Q.; Xie, Q.H.; Zhu, J. The impact of forest density on forest height inversion modeling from Polarimetric InSAR data. Remote Sens. 2016, 8, 291. [Google Scholar] [CrossRef]
- Tebaldini, S. Single and multipolarimetric SAR tomography of forested areas: A parametric approach. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2375–2387. [Google Scholar] [CrossRef]
- Tebaldini, S.; Rocca, F. Multibaseline polarimetric SAR tomography of a boreal forest at P- and L-bands. IEEE Trans. Geosci. Remote Sens. 2012, 50, 232–246. [Google Scholar] [CrossRef]
- Tebaldini, S. Multi-Baseline SAR Imaging: Models and Algorithms. Ph.D. Thesis, Politecnico Di Milano, Milano, Italy, 11 October 2009. [Google Scholar]
- Lee, J.; Hoppel, K.; Mango, S.; Miller, A. Intensity and phase statistics of multilook polarimetric and interferometric SAR image. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1017–1028. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Platform Height (m) | Center Frequency (Hz) | Incidence Angle (D) | Vertical Baseline (m) | Horizontal Baseline (m) | Vertical Wave Number | Ground Phase (D) | Forest Height (m) |
|---|---|---|---|---|---|---|---|
| 3000 | 1.3 G | 45 | 1 | 10 | 0.1154 | 0 | 18 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, D.; Zhu, J.; Fu, H.; Xie, Q.; Zhang, B. A TSVD-Based Method for Forest Height Inversion from Single-Baseline PolInSAR Data. Appl. Sci. 2017, 7, 435. https://doi.org/10.3390/app7050435
Lin D, Zhu J, Fu H, Xie Q, Zhang B. A TSVD-Based Method for Forest Height Inversion from Single-Baseline PolInSAR Data. Applied Sciences. 2017; 7(5):435. https://doi.org/10.3390/app7050435
Chicago/Turabian StyleLin, Dongfang, Jianjun Zhu, Haiqiang Fu, Qinghua Xie, and Bing Zhang. 2017. "A TSVD-Based Method for Forest Height Inversion from Single-Baseline PolInSAR Data" Applied Sciences 7, no. 5: 435. https://doi.org/10.3390/app7050435
APA StyleLin, D., Zhu, J., Fu, H., Xie, Q., & Zhang, B. (2017). A TSVD-Based Method for Forest Height Inversion from Single-Baseline PolInSAR Data. Applied Sciences, 7(5), 435. https://doi.org/10.3390/app7050435