A System for Analysing the Basketball Free Throw Trajectory Based on Particle Swarm Optimization




Abstract
:1. Introduction
2. Material and Methods
2.1. Particle Swarm Optimization
| Algorithm 1: PSO algorithm |
| For each particle i Initialize , For For each particle i If than If than |
2.2. Camera Calibration
2.3. Basketball Detection
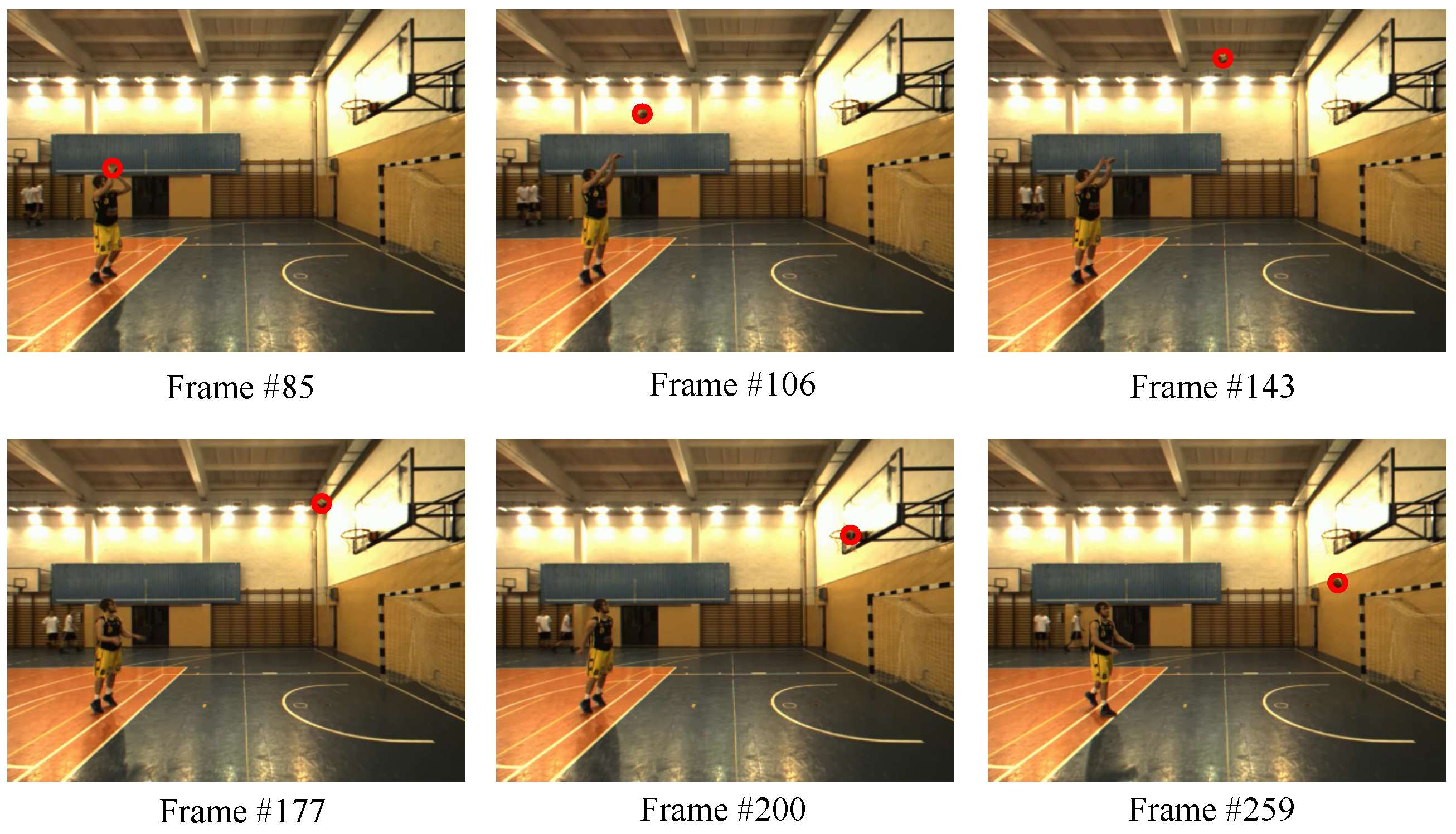
2.4. Ball Tracking
2.5. Parameter Calculations
- Calculate the 2D coordinates of the ball trajectory using the PSO algorithm.
- Smooth the trajectory using the moving average filter (window = 5),
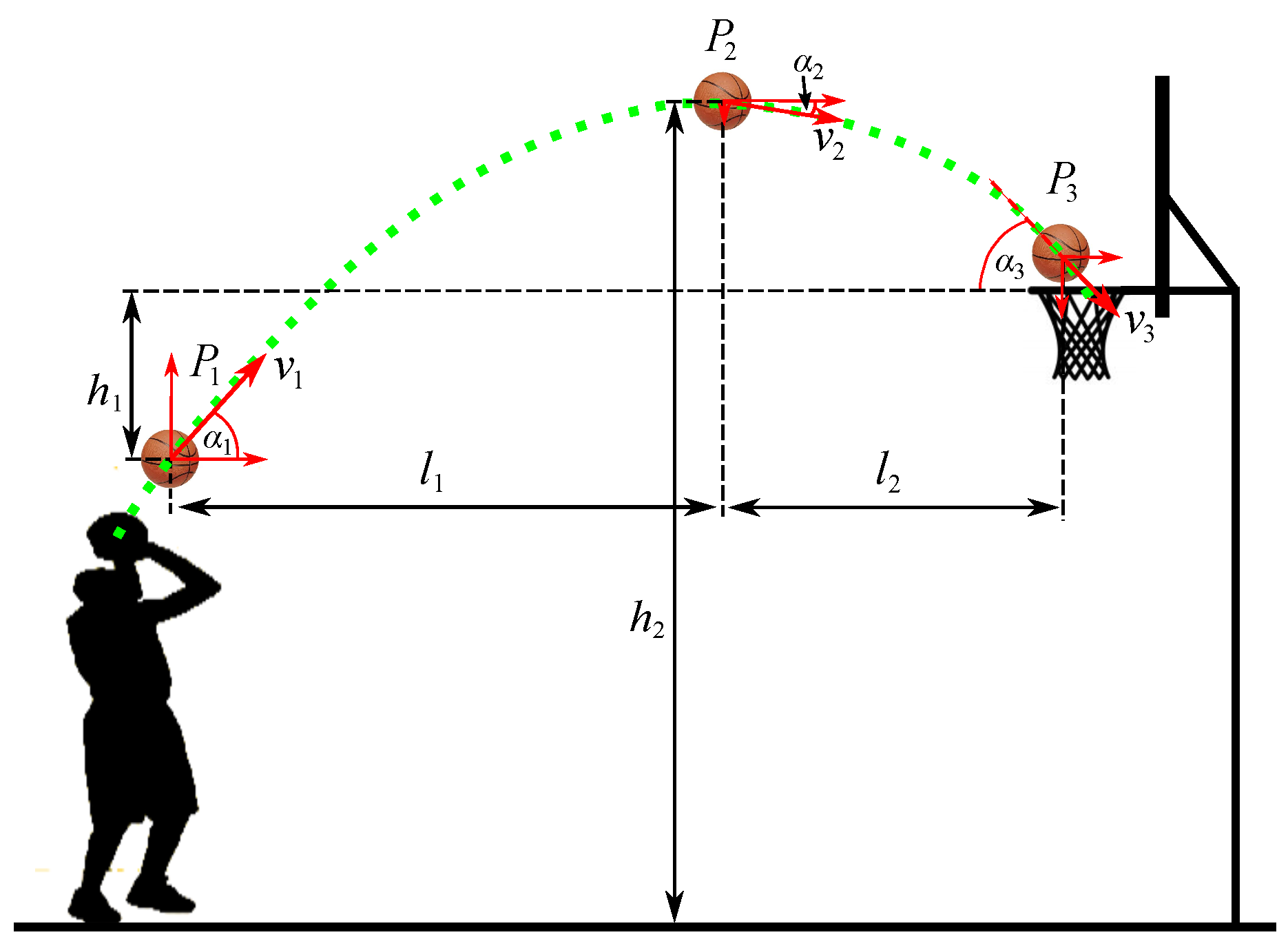
- Determination of auxiliary points (—point when the ball leaves player’s hands, —the highest point of the ball trajectory and —point when the ball makes contact for the first time with the rim line or with the basket board) (Figure 3). Points and determine the range of the analysed trajectory.
- Calculation of altitude and distance parameters on the basis of determined points.
- Determination of auxiliary vectors anchored in the analysed points to determine angular parameters.
- The angular parameters are calculated from the formula:where: is the calculated angle (degrees), —vertical vector, —horizontal vector, is the Euclidean norm of vector and is the Euclidean norm of vector .
- Conduct a statistical analysis including basic statistical measures, a test of the significance of differences between hit and missed throws, and an analysis of the relationship between the and parameters.
2.6. Data Collection
3. Results
3.1. Algorithm Evaluation
3.2. Using in Practice
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, X. Research on free throw shooting skills in basketball games. BioTechnol. Indian J. 2014, 10, 11800–11805. [Google Scholar]
- Gómez, M.Á.; Lorenzo, A.; Jiménez, S.; Navarro, R.M.; Sampaio, J. Examining choking in basketball: Effects of game outcome and situational variables during last 5 minutes and overtimes. Percept. Mot. Skills 2015, 120, 111–124. [Google Scholar] [CrossRef] [PubMed]
- Gablonsky, J.M.; Lang, A.S. Modeling basketball free throws. SIAM Rev. 2005, 47, 775–798. [Google Scholar] [CrossRef]
- Liu, Y.; Huang, C.; Liu, X. A New method to classify shots in basketball video. In Proceedings of the Second International Symposium on Networking and Network Security (ISNNS ’10), Minneapolis, MN, USA, 20–22 August 2010; pp. 153–156. [Google Scholar]
- Perše, M.; Kristan, M.; Kovačič, S.; Vučkovič, G.; Perš, J. A trajectory-based analysis of coordinated team activity in a basketball game. Comput. Vis. Image Underst. 2009, 113, 612–621. [Google Scholar] [CrossRef]
- Ammar, A.; Chtourou, H.; Abdelkarim, O.; Parish, A.; Hoekelmann, A. Free throw shot in basketball: Kinematic analysis of scored and missed shots during the learning process. Sport Sci. Health 2016, 12, 27–33. [Google Scholar] [CrossRef]
- Englert, C.; Bertrams, A.; Furley, P.; Oudejans, R.R. Is ego depletion associated with increased distractibility? Results from a basketball free throw task. Psychol. Sport Exerc. 2015, 18, 26–31. [Google Scholar] [CrossRef]
- Hamilton, G.R.; Reinschmidt, C. Optimal trajectory for the basketball free throw. J. Sports Sci. 1997, 15, 491–504. [Google Scholar] [CrossRef] [PubMed]
- Button, C.; Macleod, M.; Sanders, R.; Coleman, S. Examining movement variability in the basketball free-throw action at different skill levels. Res. Q. Exerc. Sport 2003, 74, 257–269. [Google Scholar] [CrossRef] [PubMed]
- Murphy, L. Modeling baskestball free throws. In Proceedings of the 17th Annual Statewide Undergraduate Research Conference, Amherst, MA, USA, 22 April 2012. [Google Scholar]
- Tran, C.M.; Silverberg, L.M. Optimal release conditions for the free throw in men’s basketball. J. Sports Sci. 2008, 26, 1147–1155. [Google Scholar] [CrossRef] [PubMed]
- Xu, P.; Xie, L.; Chang, S.F.; Divakaran, A.; Vetro, A.; Sun, H. Algorithms and system for segmentation and structure analysis in soccer video. In Proceedings of the International Conference on Multimedia and Expo 2001 (ICME 2001), Tokyo, Japan, 22–25 August 2001; pp. 928–931. [Google Scholar] [CrossRef]
- Rahma, A.M.S.; Rahma, M.A.; Rahma, M.A. Automated analysis for basketball free throw. In Proceedings of the Seventh International Conference on Intelligent Computing and Information Systems, Penang, Malaysia, 12–14 December 2015; pp. 447–453. [Google Scholar]
- Panagiotakis, C.; Grinias, I.; Tziritas, G. Automatic human motion analysis and action recognition in athletics videos. In Proceedings of the 14th European Signal Processing Conference, Florence, Italy, 4–8 September 2006. [Google Scholar]
- Lenik, P.; Krzeszowski, T.; Przednowek, K.; Lenik, J. The analysis of basketball free throw trajectory using PSO algorithm. In Proceedings of the 3rd International Congress on Sport Sciences Research and Technology Support, Lisbon, Portugal, 15–17 November 2015; pp. 250–256. [Google Scholar]
- Ramasso, E.; Panagiotakis, C.; Rombaut, M.; Pellerin, D.; Tziritas, G. Human shape-motion analysis in athletics videos for coarse to fine action/activity recognition using transferable belief model. Electron. Lett. Comput. Vis. Image Anal. 2009, 7, 32–50. [Google Scholar] [CrossRef]
- Elliott, N.; Choppin, S.; Goodwill, S.R.; Allen, T. Markerless tracking of tennis racket motion using a camera. Procedia Eng. 2014, 72, 344–349. [Google Scholar] [CrossRef]
- Barros, R.M.; Menezes, R.P.; Russomanno, T.G.; Misuta, M.S.; Brandão, B.C.; Figueroa, P.J.; Leite, N.J.; Goldenstein, S.K. Measuring handball players trajectories using an automatically trained boosting algorithm. Comput. Methods Biomech. Biomed. Eng. 2010, 14, 53–63. [Google Scholar] [CrossRef] [PubMed]
- Sheets, A.L.; Abrams, G.D.; Corazza, S.; Safran, M.R.; Andriacchi, T.P. Kinematics differences between the flat, kick, and slice serves measured using a markerless motion mapture method. Ann. Biomed. Eng. 2011, 39, 3011–3020. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.T.; Chou, C.L.; Fu, T.S.; Lee, S.Y.; Lin, B.S.P. Recognizing tactic patterns in broadcast basketball video using player trajectory. J. Vis. Commun. Image Represent. 2012, 23, 932–947. [Google Scholar] [CrossRef]
- Gomez, G.; López, P.H.; Link, D.; Eskofier, B. Tracking of ball and players in beach volleyball videos. PLoS ONE 2014, 9, e111730. [Google Scholar] [CrossRef] [PubMed]
- Tawab, A.M.A.; Abdelhalim, M.; Habib, S.D. Efficient multi-feature PSO for fast gray level object-tracking. Appl. Soft Comput. 2014, 14, 317–337. [Google Scholar] [CrossRef]
- Nummiaro, K.; Koller-Meier, E.; Gool, L.V. An adaptive color-based particle filter. Image Vis. Comput. 2003, 21, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.T.; Tsai, W.J.; Lee, S.Y.; Yu, J.Y. Ball tracking and 3D trajectory approximation with applications to tactics analysis from single-camera volleyball sequences. Multimed. Tools Appl. 2012, 60, 641–667. [Google Scholar] [CrossRef]
- Kurano, J.; Hayashi, M.; Yamamoto, T.; Kataoka, H.; Tanabiki, M.; Furuyama, J.; Aoki, Y. Ball trajectory extraction in team sports videos by focusing on ball holder candidates for a play search and 3D virtual display system. J. Signal Process. 2015, 19, 147–150. [Google Scholar] [CrossRef]
- Hou, Y.; Cheng, X.; Ikenaga, T. Real-time 3D ball tracking with CPU-GPU acceleration using particle filter with multi-command queues and stepped parallelism iteration. In Proceedings of the 2nd International Conference on Multimedia and Image Processing (ICMIP), Wuhan, China, 17–19 March 2017; pp. 235–239. [Google Scholar]
- Wang, X.; Ablavsky, V.; Shitrit, H.B.; Fua, P. Take your eyes off the ball: Improving ball-tracking by focusing on team play. Comput. Vis. Image Underst. 2014, 119, 102–115. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Cheng, X.; Ikoma, N.; Honda, M.; Ikenaga, T. Motion prejudgment dependent mixture system noise in system model for tennis ball 3D position tracking by particle filter. In Proceedings of the Joint 8th International Conference on Soft Computing and Intelligent Systems (SCIS) and 17th International Symposium on Advanced Intelligent Systems (ISIS), Sapporo, Japan, 25–28 August 2016; pp. 124–129. [Google Scholar]
- Cheng, X.; Zhuang, X.; Wang, Y.; Honda, M.; Ikenaga, T. Particle filter with ball size adaptive tracking window and ball feature likelihood model for ball’s 3D position tracking in volleyball analysis. In Advances in Multimedia Information Processing—PCM 2015; Ho, Y.S., Sang, J., Ro, Y.M., Kim, J., Wu, F., Eds.; Springer International Publishing: Cham, The Netherlands, 2015; pp. 203–211. [Google Scholar]
- Alexander, M.J.; Hayward-Ellis, J. The effectiveness of the shotloc training tool on basketball free throw performance and technique. Int. J. Kinesiol. Sports Sci. 2016, 4, 43–54. [Google Scholar]
- Marty, A.; McGhee, R.; Edwards, T. Trajectory Detection and Feedback System. U.S. Patent 11/508,004, 16 January 2007. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the International Conference on Neural Networks, Perth, Western Australia, 27 November–1 December 1995; IEEE Press: Piscataway, NJ, USA, 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Eberhart, R.C.; Shi, Y. Comparing inertia weights and constriction factors in particle swarm optimization. In Proceedings of the Congress on Evolutionary Computation, La Jolla, CA, USA, 16–19 July 2000; Volume 1, pp. 84–88. [Google Scholar] [CrossRef]
- Kwolek, B. Object tracking via multi-region covariance and particle swarm optimization. In Proceedings of the 11th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Washington, DC, USA, 2–4 September 2009; pp. 418–423. [Google Scholar] [CrossRef]
- Mussi, L.; Ivekovic, S.; Cagnoni, S. Markerless articulated human body tracking from multi-view video with GPU-PSO. In Evolvable Systems: From Biology to Hardware; Tempesti, G., Tyrrell, A.M., Miller, J.F., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 97–108. [Google Scholar]
- John, V.; Trucco, E.; Ivekovic, S. Markerless human articulated tracking using hierarchical particle swarm optimisation. Image Vis. Comput. 2010, 28, 1530–1547. [Google Scholar] [CrossRef]
- Kwolek, B.; Krzeszowski, T.; Gagalowicz, A.; Wojciechowski, K.; Josinski, H. Real-time multi-view human motion tracking using particle swarm optimization with resampling. In Articulated Motion and Deformable Objects; Lecture Notes in Computer Science; Perales, F., Fisher, R., Moeslund, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7378, pp. 92–101. [Google Scholar] [CrossRef]
- Michel, D.; Panagiotakis, C.; Argyros, A.A. Tracking the articulated motion of the human body with two RGBD cameras. Mach. Vis. Appl. 2015, 26, 41–54. [Google Scholar] [CrossRef]
- Zivkovic, Z.; van der Heijden, F. Efficient adaptive density estimation per image pixel for the task of background subtraction. Pattern Recogn. Lett. 2006, 27, 773–780. [Google Scholar] [CrossRef]
- Haralick, R.M.; Sternberg, S.R.; Zhuang, X. Image analysis using mathematical morphology. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 9, 532–550. [Google Scholar] [CrossRef] [PubMed]
- Ritter, N.; Cooper, J. New resolution independent measures of circularity. J. Math. Imaging Vis. 2009, 35, 117–127. [Google Scholar] [CrossRef]
- Hudson, J.L. A biomechanical analysis by skill level of free throw shooting in basketball. Biomech. Sports 1982, 1, 95–102. [Google Scholar]
- Chen, H.T.; Tien, M.C.; Chen, Y.W.; Tsai, W.J.; Lee, S.Y. Physics-based ball tracking and 3D trajectory reconstruction with applications to shooting location estimation in basketball video. J. Vis. Commun. Image Represent. 2009, 20, 204–216. [Google Scholar] [CrossRef]
- Inaba, Y.; Hakamada, N.; Murata, M. Influence of selection of release angle and speed on success rates of jump shots in basketball. In Proceedings of the 5th International Congress on Sport Sciences Research and Technology Support, Funchal, Madeira, Portugal, 30–31 October 2017; pp. 48–55. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | PF | PSO | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Particles | 50 | 100 | 200 | 300 | 500 | 5 | 10 | 20 | 30 | 50 |
| Iterations | — | — | — | — | — | 10 | 10 | 10 | 10 | 10 |
| RMSE [pixels] | 9.89 | 8.06 | 8.20 | 8.80 | 10.71 | 10.94 | 7.22 | 5.91 | 5.93 | 5.82 |
| Tracking failure [number of incidents] | 4 | 1 | 8 | 13 | 13 | 0 | 0 | 0 | 0 | 0 |
| Param. | Throws | Body Height of Athletes | All Athletes | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 171–180 cm | 181–190 cm | 191–200 cm | 201–210 cm | ||||||||||
| d | p | ||||||||||||
| hit | 695 | 214 | 678 | 219 | 463 | 237 | 345 | 141 | 542 | 251 | |||
| missed | 946 | 156 | 732 | 271 | 694 | 292 | 491 | 138 | 723 | 277 | −181.6 | 0.0001 | |
| hit | 3861 | 147 | 3902 | 74 | 3939 | 186 | 3915 | 121 | 3909 | 139 | |||
| missed | 3909 | 100 | 3903 | 120 | 3926 | 243 | 3824 | 117 | 3906 | 184 | 3.0 | 0.9004 | |
| hit | 2307 | 193 | 2187 | 132 | 2224 | 133 | 2093 | 135 | 2198 | 159 | |||
| missed | 2311 | 133 | 2205 | 165 | 2139 | 174 | 2137 | 135 | 2185 | 170 | 13.3 | 0.6061 | |
| hit | 1614 | 121 | 1629 | 152 | 1650 | 215 | 1696 | 143 | 1648 | 168 | |||
| missed | 1555 | 62 | 1552 | 144 | 1553 | 149 | 1518 | 82 | 1549 | 129 | 98 | 0.0001 | |
| hit | 48.8 | 7.3 | 55.8 | 13.7 | 46.9 | 9.1 | 47.4 | 9.9 | 50.0 | 11.2 | |||
| missed | 50.7 | 4.6 | 51.5 | 13.1 | 47.2 | 9.8 | 46.2 | 11.2 | 48.9 | 10.3 | 1.2 | 0.5070 | |
| hit | 10.7 | 2.0 | 11.0 | 2.2 | 11.9 | 3.7 | 10.7 | 2.0 | 11.2 | 2.7 | |||
| missed | 8.8 | 2.6 | 10.6 | 2.3 | 10.2 | 2.6 | 12.1 | 1.6 | 10.3 | 2.5 | 0.9 | 0.0336 | |
| hit | 45.9 | 11.2 | 45.4 | 8.9 | 44.5 | 9.8 | 44.6 | 7.1 | 45.1 | 9.2 | |||
| missed | 40.3 | 5.2 | 40.6 | 8.0 | 38.3 | 8.6 | 41.1 | 12.0 | 39.5 | 8.3 | −5.5 | 0.0001 | |
| hit | 5.5 | 0.4 | 5.6 | 0.8 | 5.5 | 0.6 | 5.3 | 0.4 | 5.5 | 0.6 | |||
| missed | 5.6 | 0.2 | 5.4 | 0.6 | 5.7 | 1.1 | 5.4 | 0.2 | 5.6 | 0.8 | −0.1 | 0.5171 | |
| hit | 3.9 | 0.3 | 3.9 | 0.2 | 4.0 | 0.3 | 4.0 | 0.2 | 4.0 | 0.3 | |||
| missed | 3.9 | 0.2 | 3.9 | 0.3 | 4.0 | 0.5 | 4.1 | 0.2 | 4.0 | 0.4 | 0.0 | - | |
| hit | 4.4 | 1.0 | 4.6 | 0.8 | 4.7 | 0.7 | 4.7 | 0.8 | 4.6 | 0.8 | |||
| missed | 4.6 | 0.2 | 4.7 | 0.5 | 4.6 | 0.6 | 4.3 | 0.7 | 4.6 | 0.5 | 0.0 | - | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Przednowek, K.; Krzeszowski, T.; Przednowek, K.H.; Lenik, P. A System for Analysing the Basketball Free Throw Trajectory Based on Particle Swarm Optimization. Appl. Sci. 2018, 8, 2090. https://doi.org/10.3390/app8112090
Przednowek K, Krzeszowski T, Przednowek KH, Lenik P. A System for Analysing the Basketball Free Throw Trajectory Based on Particle Swarm Optimization. Applied Sciences. 2018; 8(11):2090. https://doi.org/10.3390/app8112090
Chicago/Turabian StylePrzednowek, Krzysztof, Tomasz Krzeszowski, Karolina H. Przednowek, and Pawel Lenik. 2018. "A System for Analysing the Basketball Free Throw Trajectory Based on Particle Swarm Optimization" Applied Sciences 8, no. 11: 2090. https://doi.org/10.3390/app8112090