4.2.1. Static Test
The set of static data was used to assess the performance of the proposed system under ionospheric scintillation interference and in a low C/N
0 signal environment. The parameters of the static data were set as shown in
Table 4.
The sky plot of GPS satellites for the static test is shown in
Figure 5.
It can be seen that most of the elevations of satellites are lower than 45°, which may suffer lower C/N0 signals and ionospheric scintillation interference easier. This is similar to the parameters of the static data. In the following section, we chose SV #3, 12, and 25 to analyze the scintillation statistics and their tracking performance.
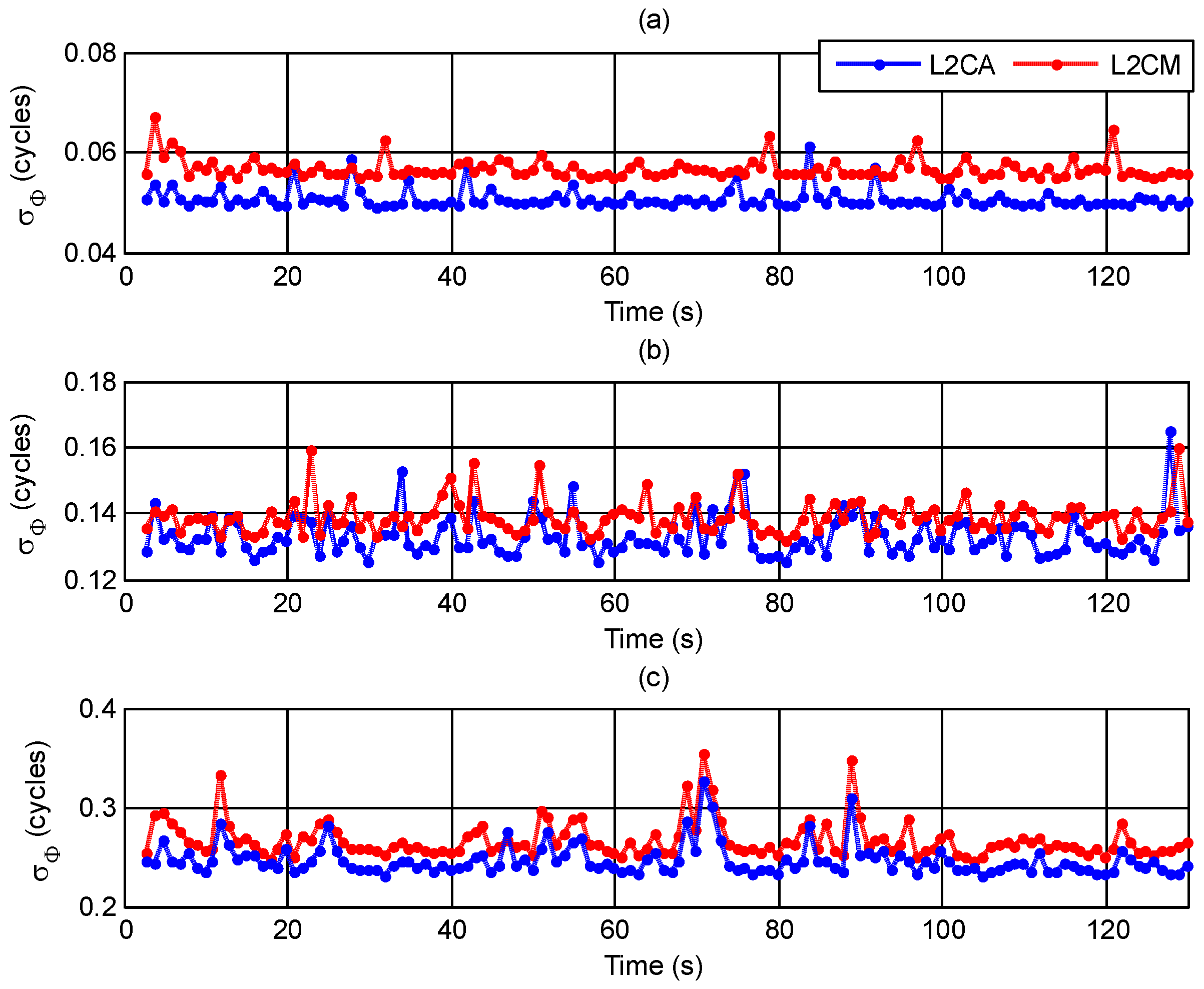
It is noted that the scintillation of carrier phase fluctuation often occurs with less amplitude fading in polar areas, so we focus on the carrier phase fluctuation. In general,
> 0.3 cycles indicates strong scintillation with strong carrier phase fluctuation. The
indicators for SV #3, 12, and 25 during the simulation are shown in
Figure 6.
From
Figure 6a we can see that nearly all
indices for SV #3 are smaller than 0.1 during the simulation time, which can be considered as weak scintillation. Meanwhile,
Figure 6b shows that most of the
indices for SV #12 fluctuate between 0.13 and 0.15, which can be regarded as moderate scintillation. Several
values approach and even exceed 0.3 for SV #25 in
Figure 6c, which represents strong scintillation.
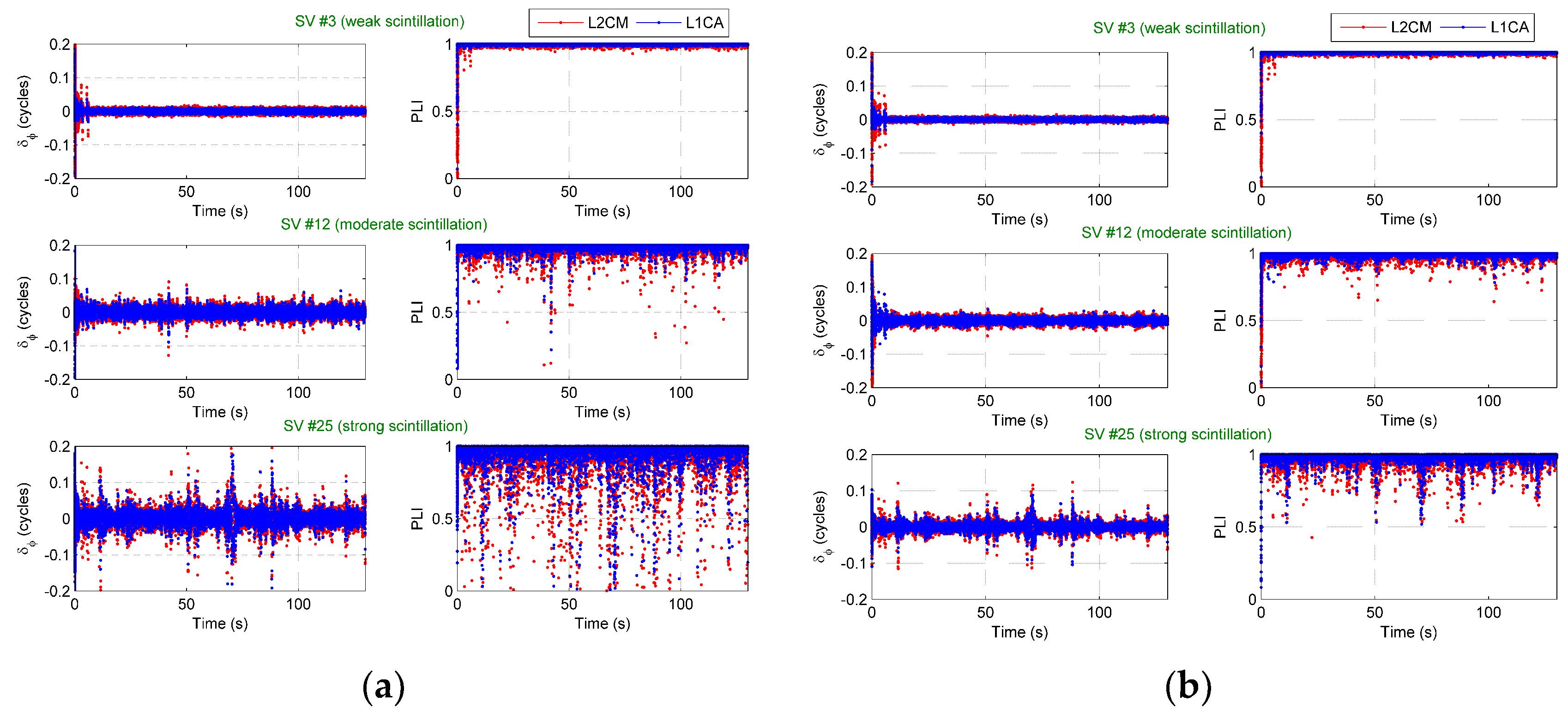
Then, the carrier phase lock indicator (PLI) was used as the criterion of carrier phase tracking performance; it can be expressed as
The PLI is equal to 1 when the phase is perfectly locked, while it is equal to 0 when the phase lock is lost. In this paper, we use 0.9 and 0.5 as the thresholds of good carrier phase lock and poor carrier phase lock, respectively.
The carrier tracking performances of the three satellite signals using a traditional GNSS tracking loop (a third-order tracking loop with 15 Hz fixed bandwidth, denoted T-GNSS) and the proposed ionosphere-free dual-frequency GNSS/SINS deep-coupled navigation system (denoted IF-DDC) are shown in
Figure 7. A summary of the carrier phase tracking performance under scintillation is shown in
Table 5.
It can be seen from
Figure 7 and
Table 5 that both the T-GNSS and IF-DDC have good carrier phase tracking performance under weak scintillation (i.e., SV #3) during the tracking. The tracking does not have losses during the tracking time. However, the carrier tracking performance of T-GNSS under moderate scintillation (i.e., SV #12) decreases and goes on to suffer large losses under strong scintillation (i.e., SV #25). On the contrary, the carrier tracking of IF-DDC has a much better performance compared with T-GNSS. Although the carrier tracking performance decreases under strong scintillation, most of the PLIs of IF-DDC are still better than 0.5.
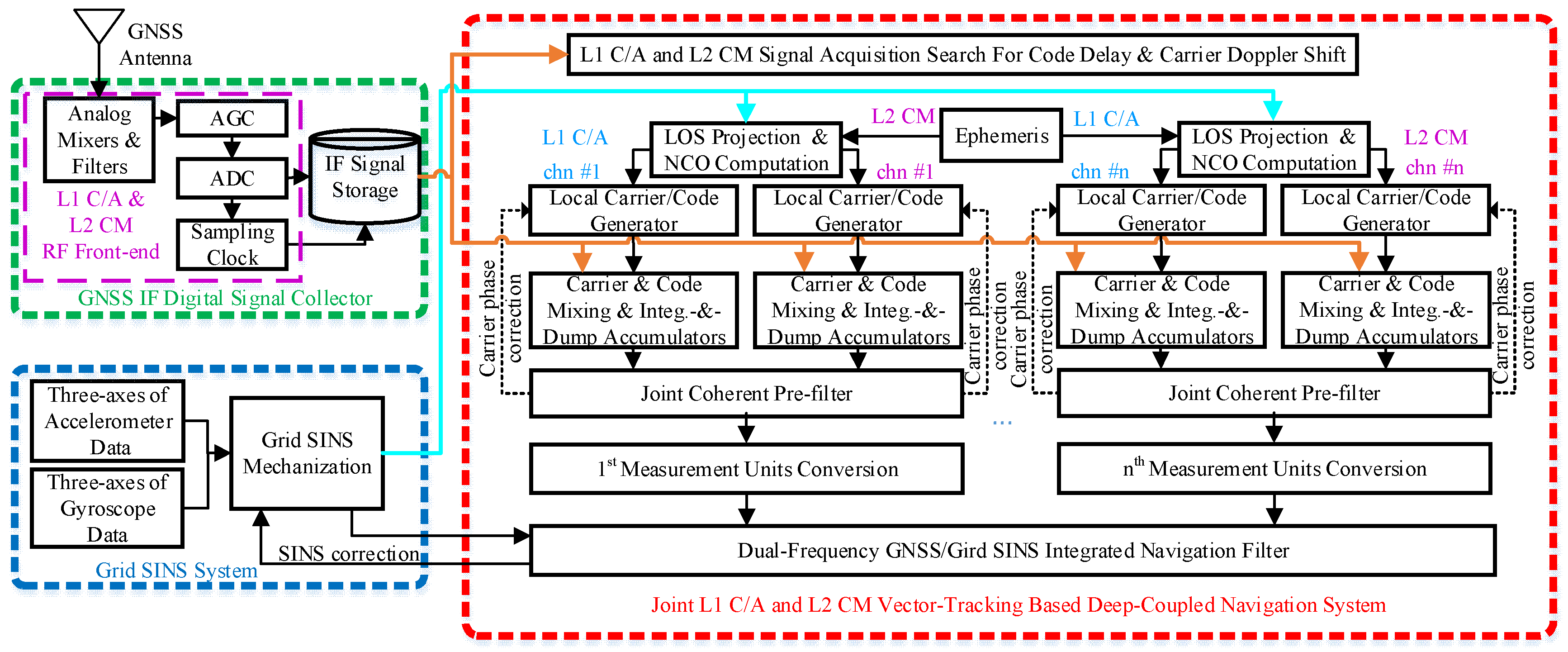
The main reason for the performance improvement of IF-DDC is that the IF-DDC has a joint L1 C/A and L2 CM vector-tracking-based structure, which can provide more measurement information and share better tracking information to aid weak signal channels with strong signal channels. Besides this, the tracking and prefiltering of IF-DDC has adaptive process noise covariance and measurement noise covariance which can reach an optimal equivalent bandwidth during the tracking processing to improve the tracking robustness and accuracy.
It is noted that the L1 C/A signal has a better tracking performance than the L2 CM signal, especially under moderate and strong scintillation, due to the different received RF signal strength and different ionospheric scintillation characters (i.e., ionospheric scintillation strength corresponds to the carrier frequency) between the L1 C/A and L2 CM signals.
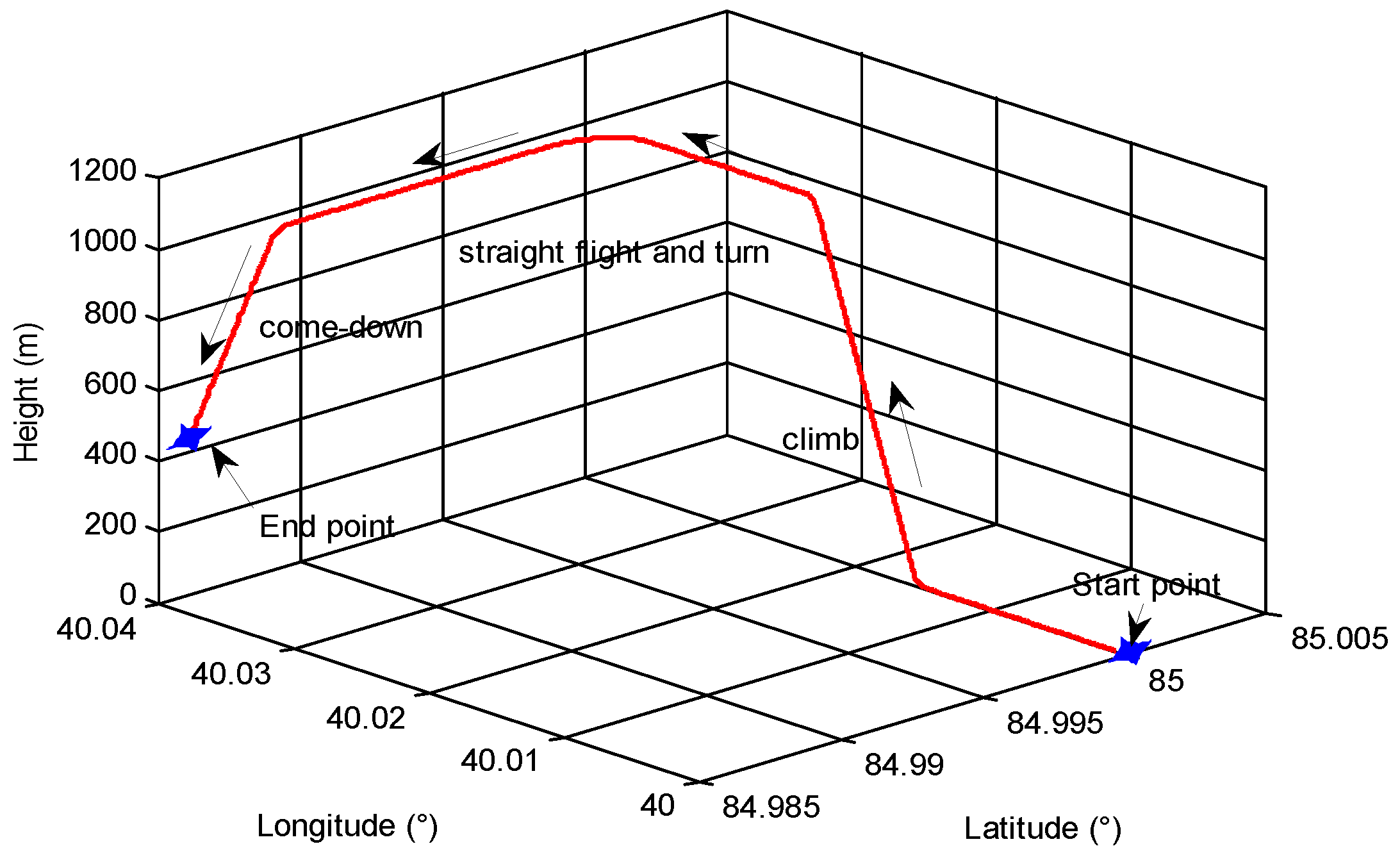
4.2.2. Dynamic Test
In the dynamic test, a flight test was set to assess the dynamic performance of the proposed system in polar areas. The parameters of the set of dynamic data are shown in
Table 6.
It is noted that the parameters of the visible satellites, C/N
0, and ionospheric scintillation interference in the dynamic test are the same as the parameters in the static test. The flight trajectory for the dynamic test in polar areas is shown in
Figure 8.
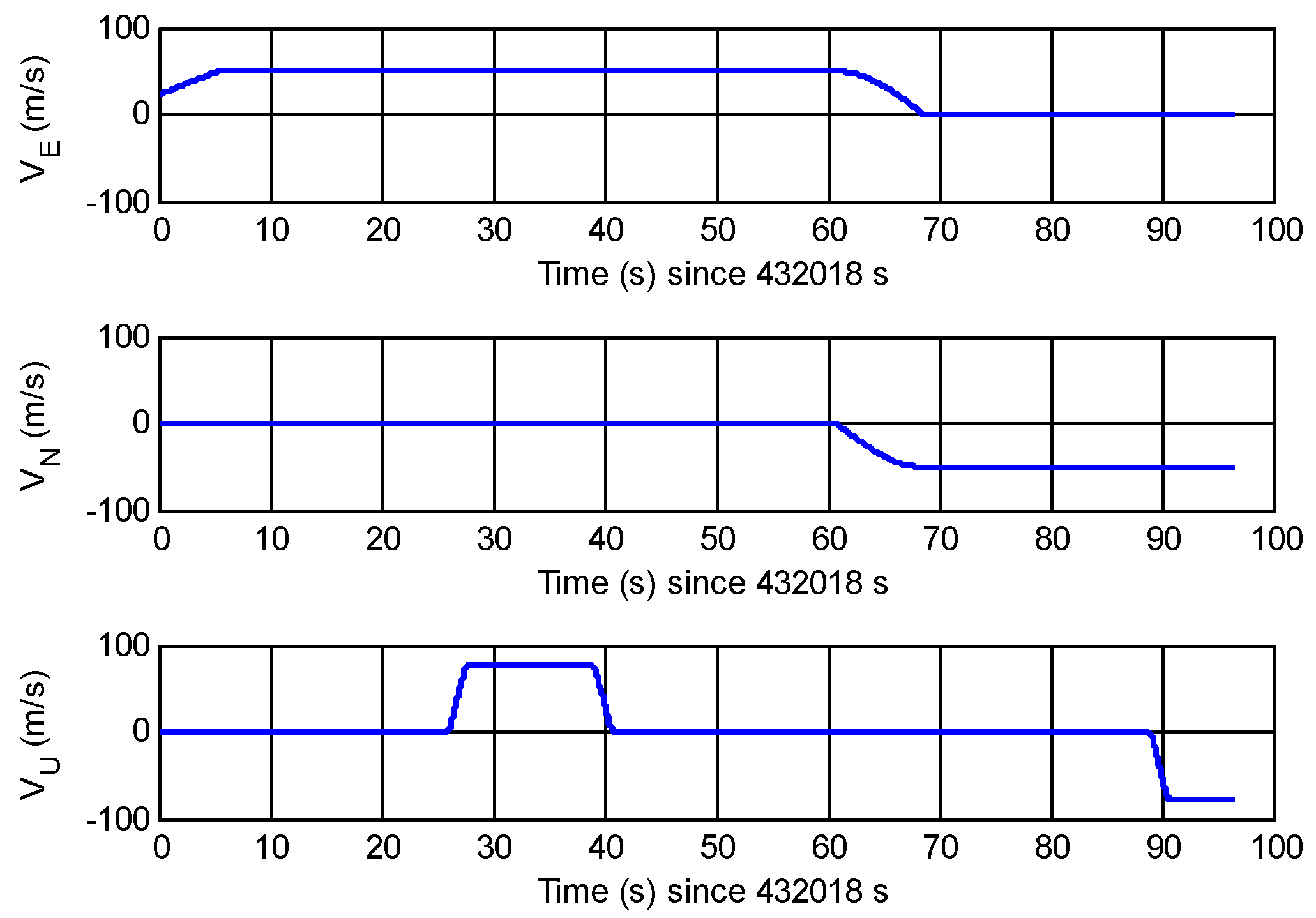
It can be seen that the flight motions include climb, level off, straight flight, turn, and come-down. Meanwhile, the flight velocity and the flight acceleration and jerk are shown in
Figure 9 and
Figure 10, respectively.
It can be seen that there are several periods of acceleration and jerk with maximum acceleration and jerk of 5
g and 50
g/s, respectively. It is noted that the time axis of
Figure 9 and
Figure 10 starts from 432,018 s which is the start epoch of the system outputting the navigation results after about 34 s of tracking.
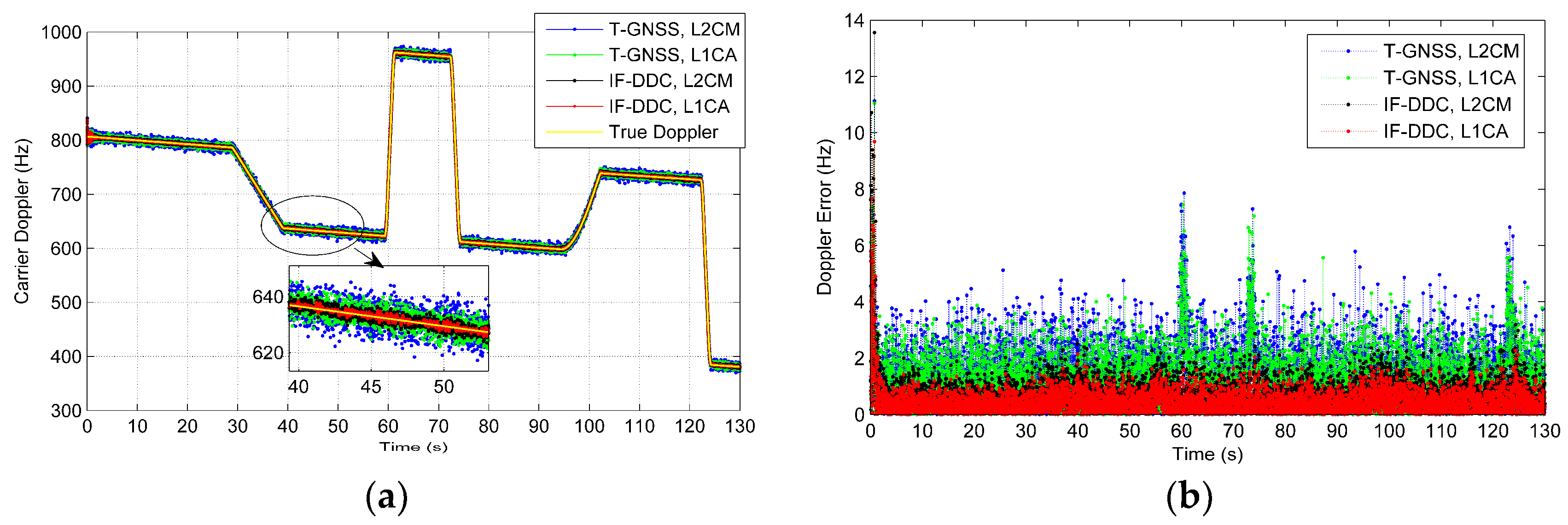
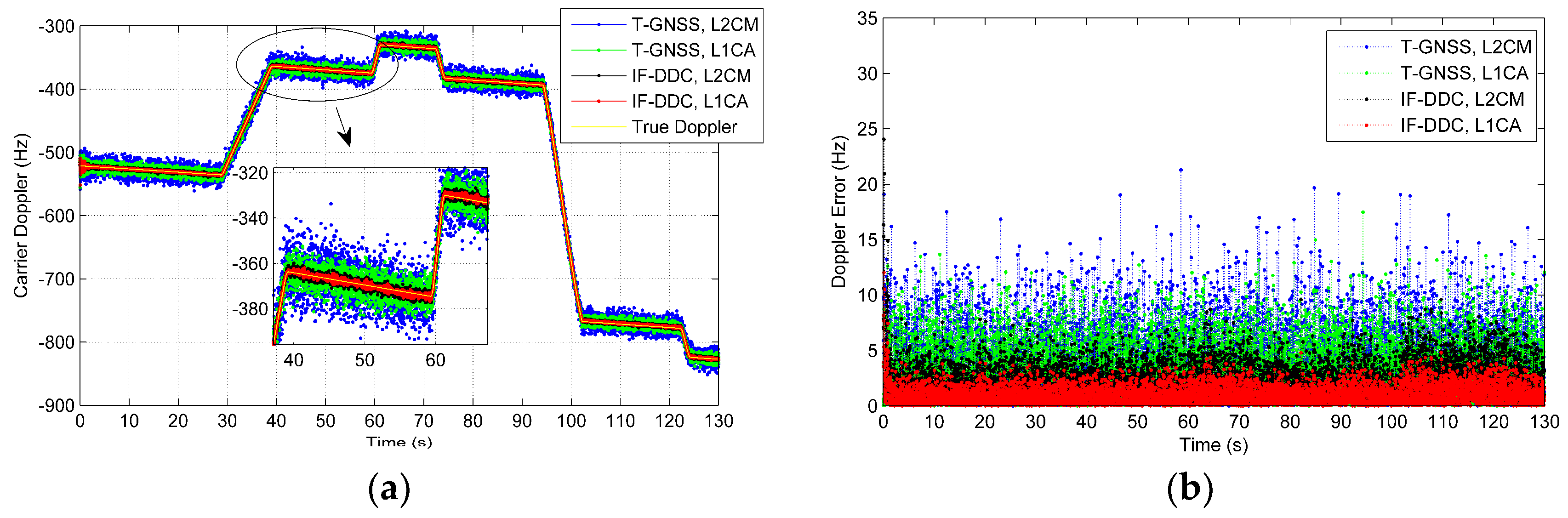
Figure 11 and
Figure 12 illustrate the carrier frequency tracking performance using different methods. In this section, the moderate scintillation (i.e., SV #12) and strong scintillation (i.e., SV #25) were focused upon to assess their performance.
It can be seen in
Figure 11 that the IF-DDC method allows a reduction in the noise presented in the carrier Doppler compared with the T-GNSS method. The IF-DDC achieves the best performance in terms of noise and scintillation reduction. This is even more evident from
Figure 12 where the signal suffers lower C/N
0 and stronger scintillation. Besides this, when compared with
Figure 10, some trends related to flight dynamics can be seen in
Figure 11b. The transient errors as well as the effects of jerk still remain when the T-GNSS method is used. However, these trends are all removed by the IF-DDC method due to the aid of the grid SINS information.
The results of the tracking performance in the dynamic test show that the proposed IF-DDC method can optimize the tracking band, sharing tracking information to aid the weak signal channels with strong signal channels to reduce the noise and scintillation interference, and utilize SINS information to reduce the dynamic requirement of the tracking loop.
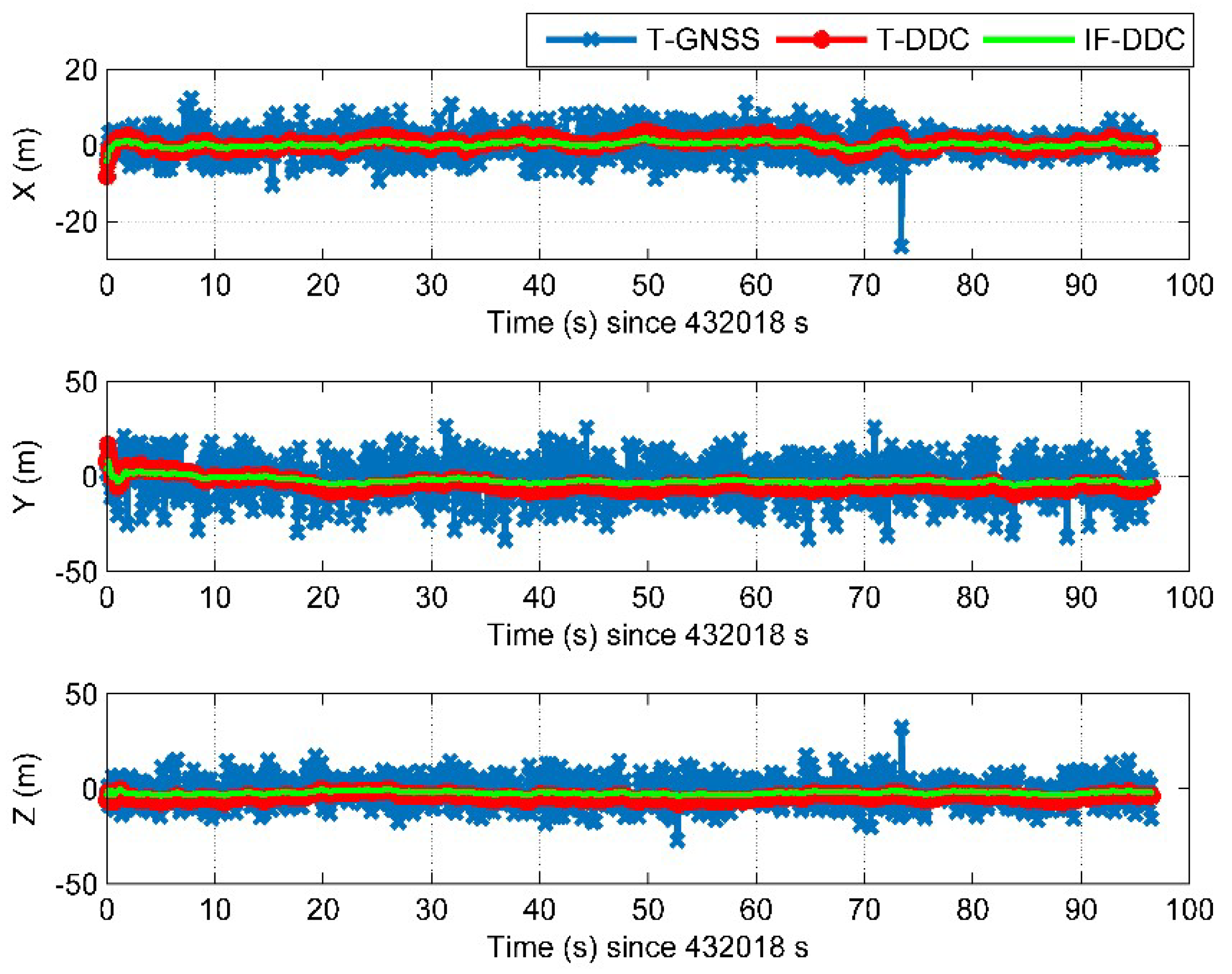
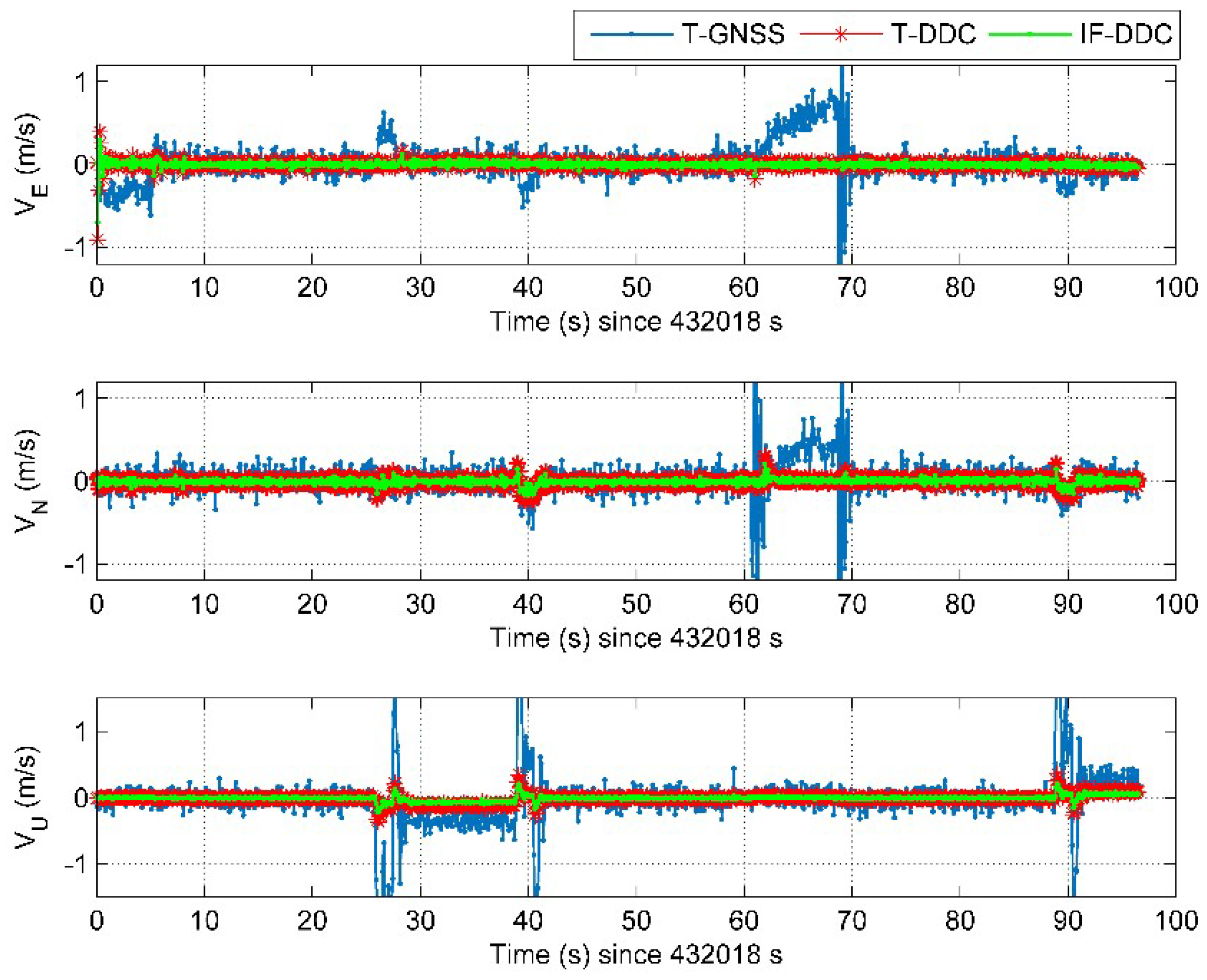
Finally, the position and velocity errors for different methods in the dynamic test are shown in
Figure 13 and
Figure 14. Similar to
Figure 9 and
Figure 10, the time axis of
Figure 13 and
Figure 14 starts from 432,018 s which is the start epoch of the system outputting the navigation results after about 34 s of tracking. In order to assess the effectiveness of the ionosphere-free combination of L1 C/A and L2 CM signals, the non-ionosphere-free dual-frequency deep-coupled navigation (i.e., the L1 C/A and L2 CM signals used as independent information in the system, denoted T-DDC) is also compared in the navigation results.
Table 7 shows the RMS position error statistics of the dynamic test.
From
Figure 13 and
Table 7 we can see that both the T-DDC and IF-DDC methods can obtain more accurate position results than the T-GNSS method. Meanwhile, IF-DDC has better position performance than the T-DDC, which indicates that the ionosphere-free combination of L1 C/A and L2 CM signals can further reduce the position error caused by ionospheric delay.
Table 8 shows the RMS velocity error statistics of the dynamic test.
As depicted in
Figure 14 and
Table 8, we also see that both the T-DDC and IF-DDC methods can obtain more accurate velocity results than the T-GNSS method. Moreover, the velocity of T-GNSS is still affected by the effects of jerk, while the velocities of T-DDC and IF-DDC are much smoother than that of T-GNSS during the jerk periods.
As a whole, the proposed IF-DDC method can obtain more stable and accurate navigation performance compared with the traditional T-GNSS method.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}