Direct Numerical Simulation of Gas–Particle Flows with Particle–Wall Collisions Using the Immersed Boundary Method


Abstract
:1. Introduction
2. Numerical Methods
2.1. Governing Equations
2.2. Immersed Boundary Method
2.3. Force Evaluations
2.4. Motion of Object
3. Results
3.1. Validation around a Fixed Particle
3.2. Collision of a Moving Particle with a Flat Wall
3.3. Collision of a Moving Particle with a Curved Wall
3.4. Collision of Two Moving Particles
3.5. Collision of Multiple Particles with a Flat Wall
4. Conclusions
- (1)
- The drag coefficient of a fixed particle computed by the proposed solver agreed well with the drag coefficient of previous studies. The skew–symmetric scheme could capture the unsteady flow characteristics such as the wake structure.
- (2)
- The wake structures of the moving particle colliding with the flat wall, the curved wall and another moving particle exhibited the same trends as the wake structures computed in previous studies. We demonstrated that the present flow solver using a simple collision algorithm appropriately solves the collision problem.
- (3)
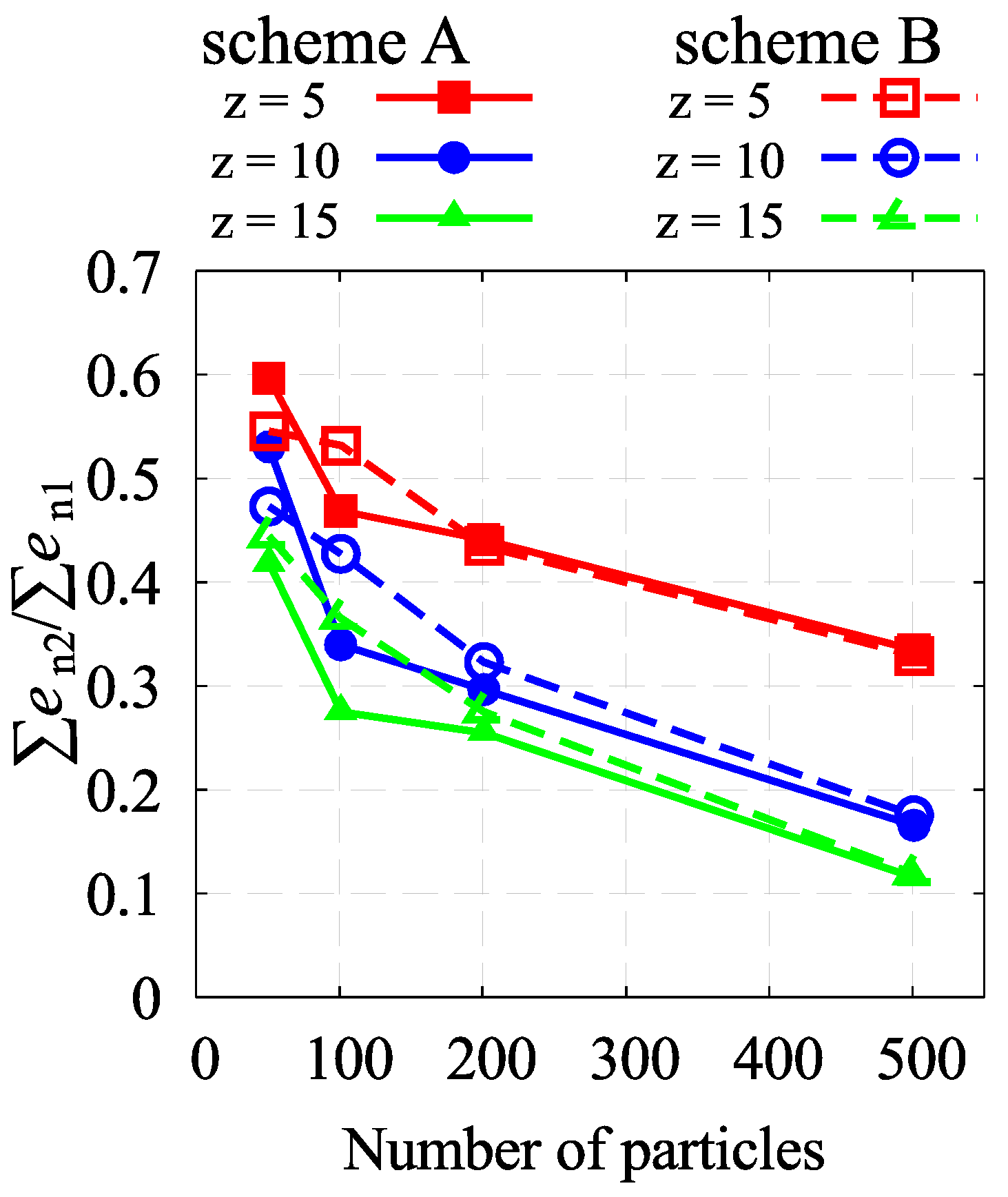
- When the number of particles is large, the flow structure becomes complex because particle–particle collisions caused frequent lateral movements of the particles.
- (4)
- For many particles, the one-way scheme could not accurately predict the flows, because it overestimated the number of collisions and ignored the influence of the particles on the fluid, which altered the flow phenomena.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | CPU Time (s) |
|---|---|
| A050 | 24,966.707 |
| A100 | 24,538.322 |
| A200 | 26,742.404 |
| A500 | 26,214.485 |
| B050 | 21,369.633 |
| B100 | 23,787.872 |
| B200 | 25,996.342 |
| B500 | 26,384.007 |
References
- Eames, I.; Dalziel, S.B. Dust resuspension by the flow around an impacting sphere. J. Fluid Mech. 2000, 403, 305–328. [Google Scholar] [CrossRef] [Green Version]
- Vanella, M.; Balaras, E. A moving–least–squares reconstruction for embedded–boundary formulations. J. Comput. 2009, 228, 6617–6628. [Google Scholar] [CrossRef]
- Griffith, D.M.; Schouveiler, L.; Thompson, C.M.; Hourigan, K. Dynamics of the flow around colliding spheres. J. Fluids Struct. 2011, 27, 1349–1356. [Google Scholar] [CrossRef]
- Kajishima, T. Influence of particle rotation on the interaction between particle clusters and particle-induced turbulence. Int. J. Heat Fluid Flow 2004, 25, 721–728. [Google Scholar] [CrossRef]
- Deen, N.G.; Peters, E.A.J.F.; Padding, J.T.; Kuipers, J.A.M. Review of direct numerical simulation of fluid–particle mass, momentum and heat transfer in dense gas–solid flows. Chem. Eng. Sci. 2014, 116, 710–724. [Google Scholar] [CrossRef]
- Di Sarli, V.; Russo, P.; Sanchirico, R.; Di Benedetto, A. CFD simulations of the effect of dust diameter on the dispersion in the 20 L bomb. Chem. Eng. Trans. 2013, 31, 727–732. [Google Scholar] [CrossRef]
- Nguyen, B.V.; Poh, J.H.; Zhang, W.Y. Predicting shot peening coverage using multiphase computational fluid dynamics simulations. Powder Technol. 2004, 256, 100–112. [Google Scholar] [CrossRef]
- Kirk, D.; Abyaneh, M.Y. Theoretical basis of shot peening coverage control. Shot Peener 1995, 9, 28–30. [Google Scholar]
- Kopp, R.; Wustefeld, F. Modern Simulation and Optimization of Peen Forming Processes. In Proceedings of the International Conferences on Shot Peening, Tokyo, Japan, 1990; pp. 561–572. [Google Scholar]
- Garipy, A.; Larose, S.; Perron, C.; Bocher, P.; Levesque, M. On the effect of the peening trajectory in shot peen forming. Finite Elem. Anal. Des. 2013, 69, 48–61. [Google Scholar] [CrossRef]
- Kato, Y.; Omiya, M.; Hoshino, H. Modeling of Particle Behavior in Shot Peening Process. J. Mech. Eng. Autom. 2014, 4, 83–91. [Google Scholar]
- Mittal, R.; Iaccarino, G. IMMERSED BOUNDARY METHODS. Fluid Mech. 2005, 37, 239–261. [Google Scholar] [CrossRef]
- Mizuno, Y.; Takahashi, S.; Nonomura, T.; Nagata, T.; Fukuda, K. A Simple Immersed Boundary Method for Compressible Flow Simulation around a Stationary and Moving Sphere. Math. Probl. Eng. 2015, 2015, 1–17. [Google Scholar] [CrossRef]
- Takahashi, S.; Nonomura, T.; Fukuda, K. A Numerical Scheme Based on an Immersed Boundary Method for Compressible Turbulent Flows with Shocks: Application to Two–Dimensional Flows around Cylinders. J. Appl. Math. 2014, 2014, 1–21. [Google Scholar] [CrossRef]
- Mizuno, Y.; Inoue, T.; Takahashi, S.; Fukuda, K. Investigation of A Gas–particle Flow with Particle–particle And Particle–wall Collisions by Immersed Boundary Method. Int. J. Comput. Meth. Exp. Meas. 2018, 6, 132–138. [Google Scholar] [CrossRef]
- Morinishi, Y. Skew–symmetric form of convective terms and fully conservative finite difference schemes for variable density low–Mach number flows. J. Comput. Phys. 2010, 229, 276–300. [Google Scholar] [CrossRef]
- Takahashi, S.; Monjugawa, I.; Nakahashi, K. Unsteady Flow Computations around Moving Airfoils by Overset Unstructured Grid Method. Trans. Jpn. Soc. Aeronaut. Space Sci. 2008, 51, 78–85. [Google Scholar] [CrossRef] [Green Version]
- Nonomura, T.; Onishi, J. A comparative Study on Evaluation Methods of Fluid Forces on Cartesian Grids. Math. Probl. Eng. 2017, 2017, 1–15. [Google Scholar] [CrossRef]
- Kosinski, P.; Hoffmann, A.C. Extension of the hard-sphere particle-wall collision model to account for particle deposition. Phys. Rev. 2009, 79, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Kosinski, P.; Hoffmann, A.C. An extension of the hard–sphere particle–particle collision model to study agglomeration. Chem. Eng. Sci. 2010, 65, 3231–3239. [Google Scholar] [CrossRef]
- Clift, R.; Ganvio, H.W. Motion of entrained particles in gas streams. Can. J. Chem. Eng. 1971, 49, 439–448. [Google Scholar] [CrossRef]
- Wen, C.Y.; Yu, Y.H. A generalized method for predicting the minimum fluidization velocity. Chem. Eng. Prog. Symp. Ser. 1699, 6, 100. [Google Scholar] [CrossRef]
- Mittal, R.; Dong, H.; Bozkurttas, M.; Najjar, F.M.; Vargas, A.; von Loebbecke, A. A versatile sharp interface immersed boundary method for incompressible flows with complex boundaries. J. Comput. Phys. 2008, 227, 4825–4852. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luo, K.; Wang, Z.; Fan, J. A modified immersed boundary method for simulations of fluid–particle interactions. Comput. Methods Appl. Mech. Eng. 2007, 197, 36–46. [Google Scholar] [CrossRef]
- Zhang, W.; Noda, R.; Horio, M. Evaluation of lubrication force on colliding particles for DEM simulation of fluidized beds. Powder Technol. 2005, 158, 92–101. [Google Scholar] [CrossRef]



























| Reynolds Number | Mesh Size | Scheme | Case |
|---|---|---|---|
| 300 | 0.10D 0.05D 0.10D | upwind. | Re300D010U Re300D005U Re300D010S |
| 400 | 0.05D 0.10D 0.05D | skew-sym. | Re300D005S Re400D010S Re400D005S |
| Scheme | Number of Particles | Case |
|---|---|---|
| one–way | 50 | A050 |
| 100 | A100 | |
| 200 | A200 | |
| 500 | A500 | |
| two–way | 50 | B050 |
| 100 | B100 | |
| 200 | B200 | |
| 500 | B500 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mizuno, Y.; Takahashi, S.; Fukuda, K.; Obayashi, S. Direct Numerical Simulation of Gas–Particle Flows with Particle–Wall Collisions Using the Immersed Boundary Method. Appl. Sci. 2018, 8, 2387. https://doi.org/10.3390/app8122387
Mizuno Y, Takahashi S, Fukuda K, Obayashi S. Direct Numerical Simulation of Gas–Particle Flows with Particle–Wall Collisions Using the Immersed Boundary Method. Applied Sciences. 2018; 8(12):2387. https://doi.org/10.3390/app8122387
Chicago/Turabian StyleMizuno, Yusuke, Shun Takahashi, Kota Fukuda, and Shigeru Obayashi. 2018. "Direct Numerical Simulation of Gas–Particle Flows with Particle–Wall Collisions Using the Immersed Boundary Method" Applied Sciences 8, no. 12: 2387. https://doi.org/10.3390/app8122387