A Novel Impact Rotary–Linear Motor Based on Decomposed Screw-Type Motion of Piezoelectric Actuator


Abstract
:1. Introduction
2. Working Principle
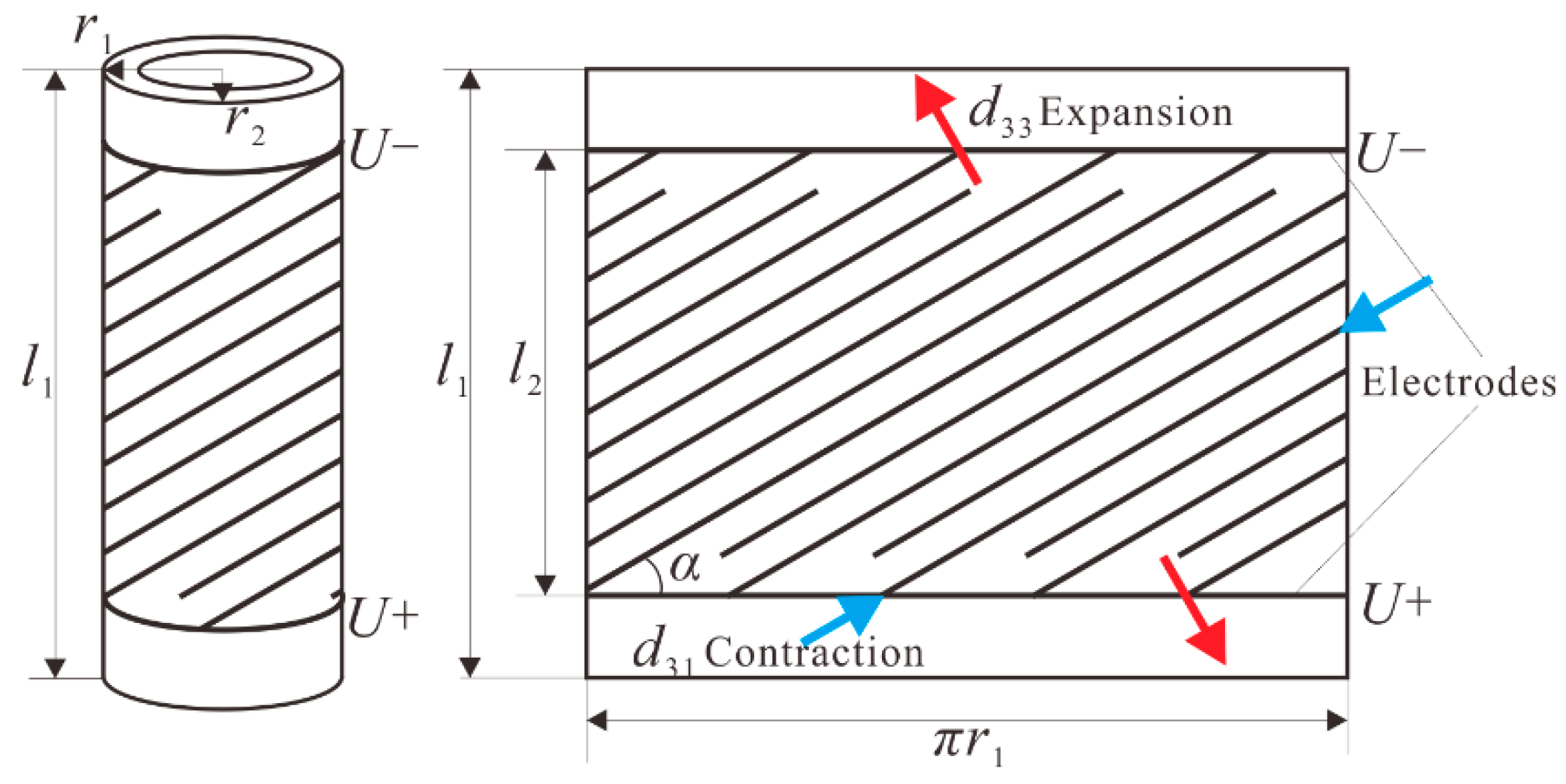
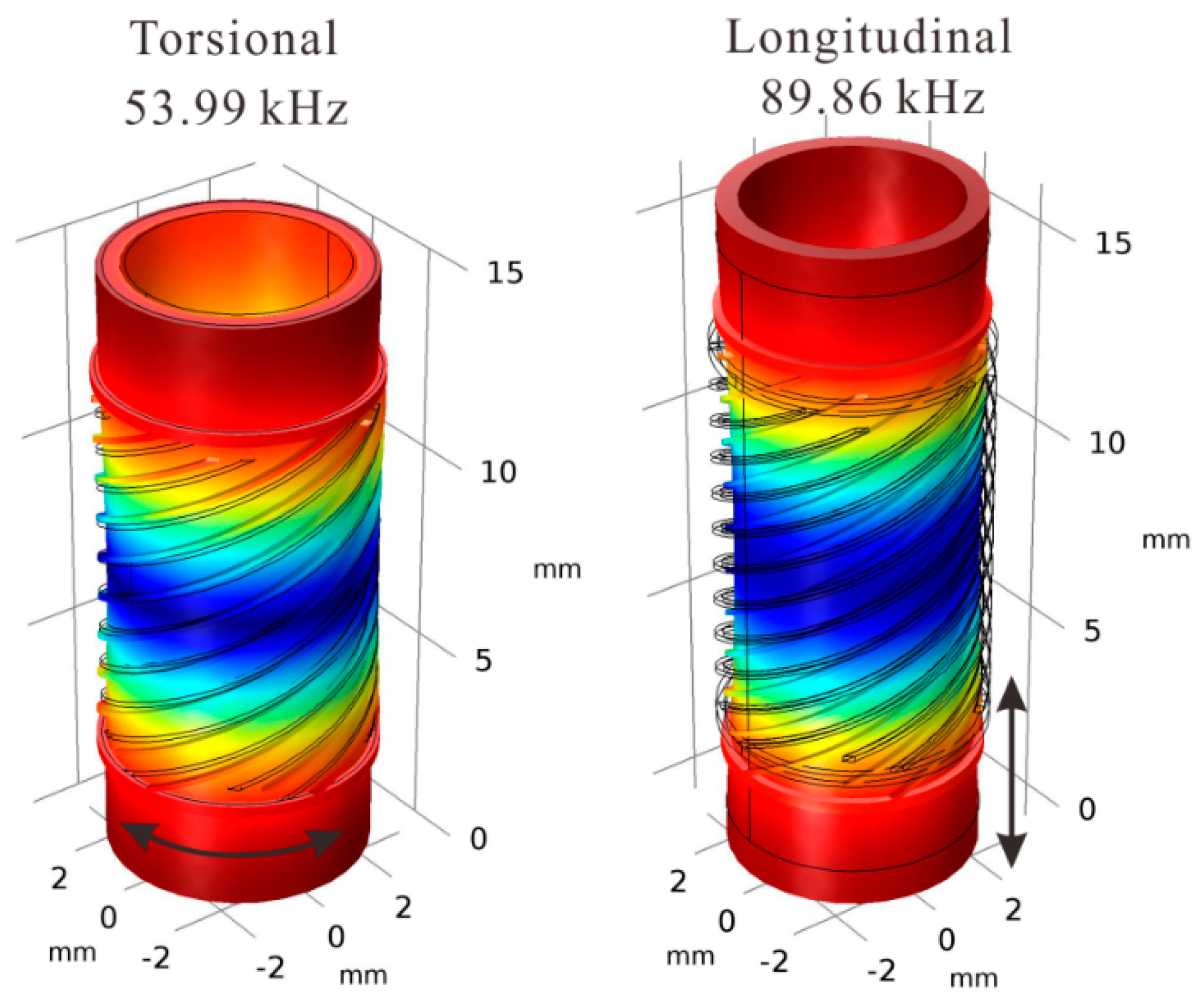
2.1. Piezoelectric Actuator
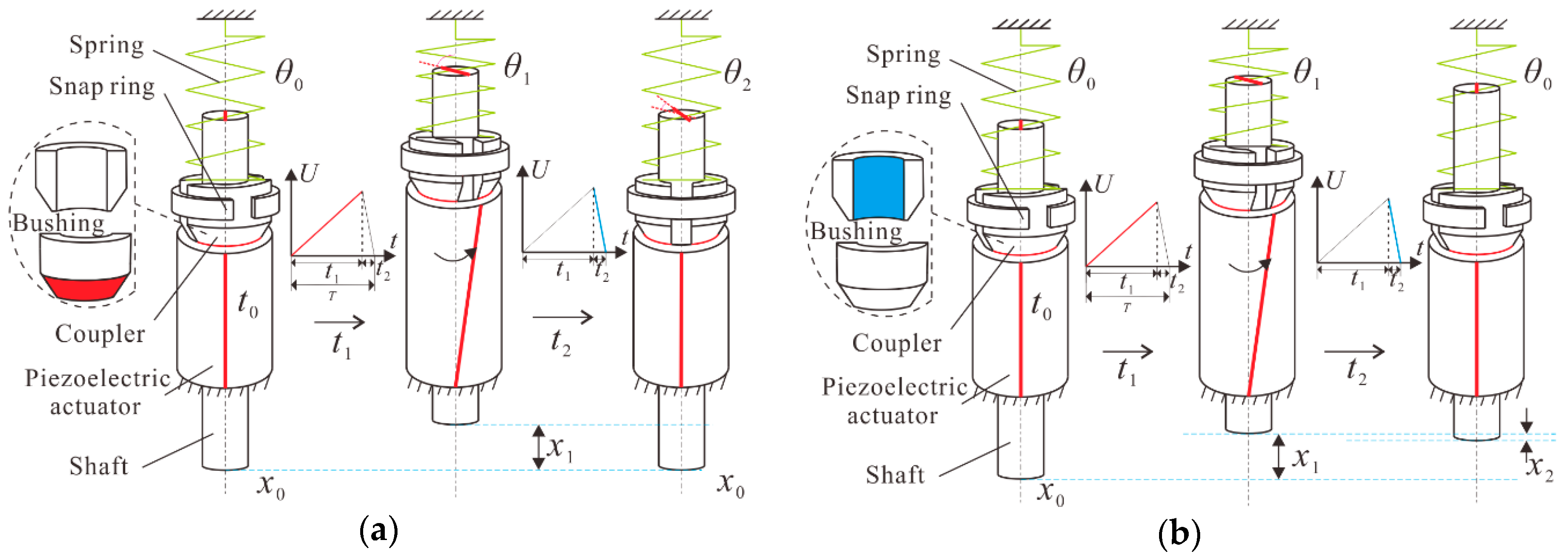
2.2. Working Principle of the Impact Rotary–Linear Motor
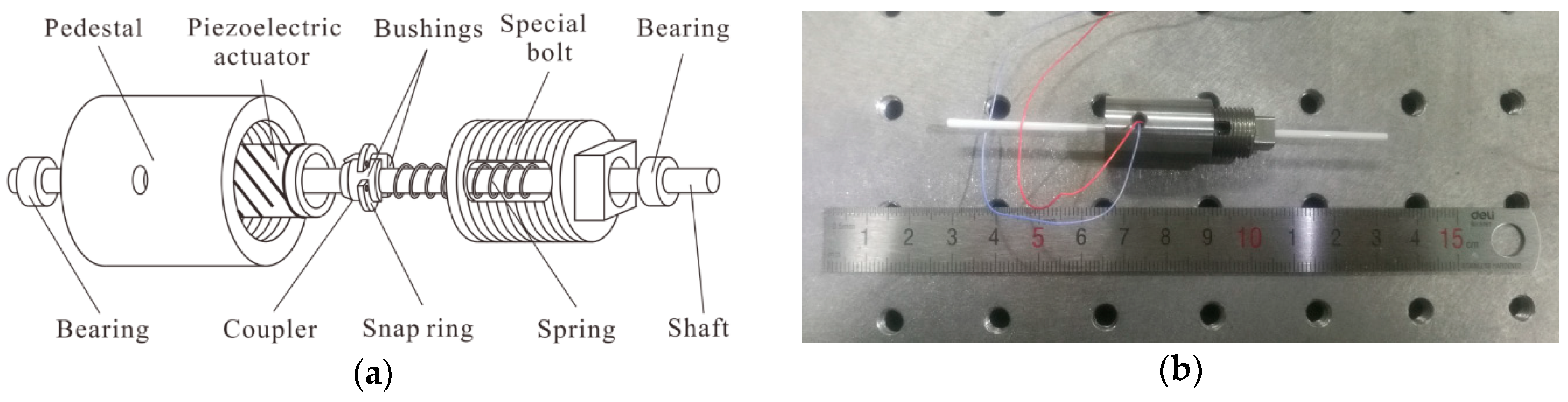
3. Fabrication of the Prototype Motor
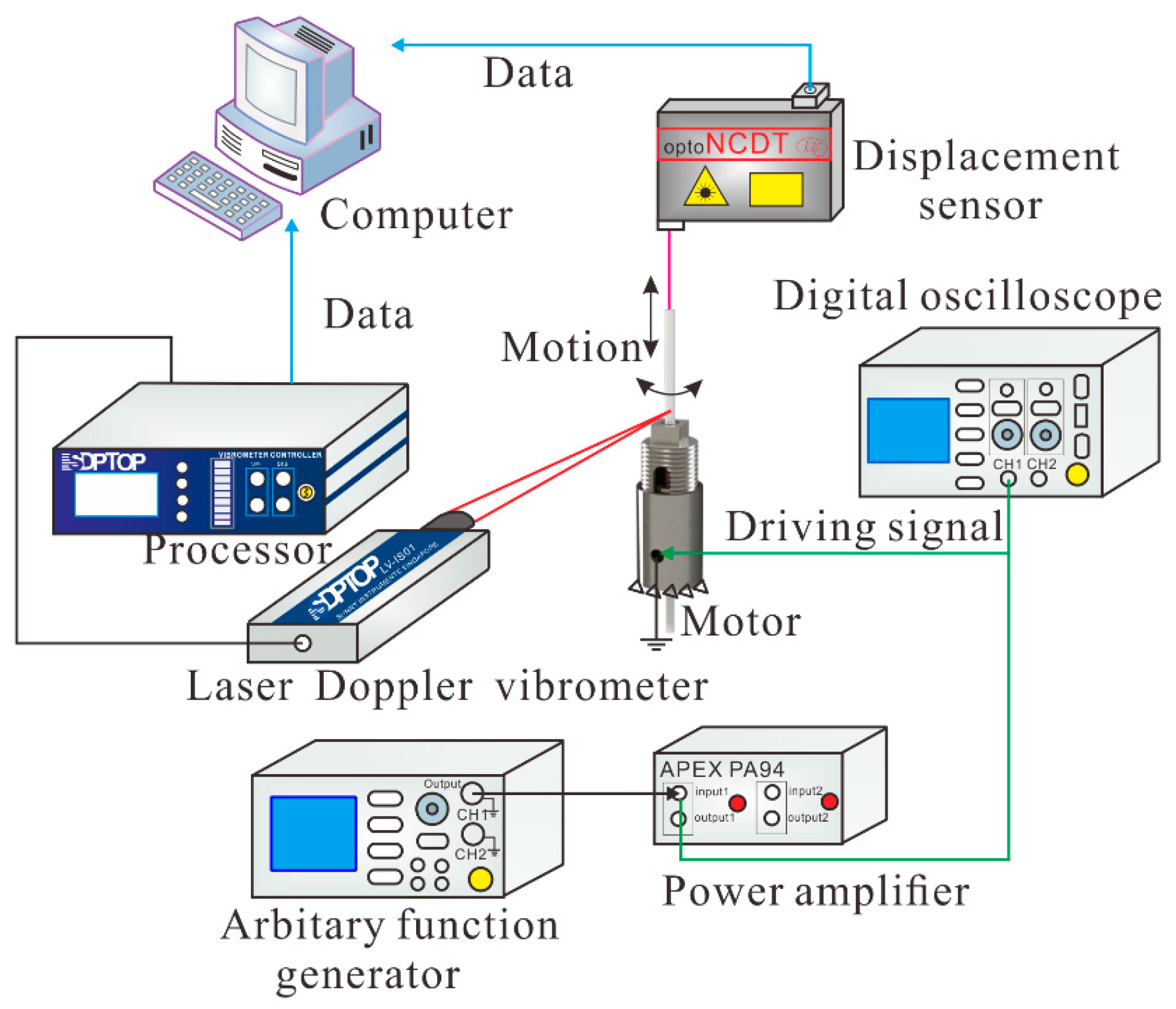
4. Experimental Tests and Discussions
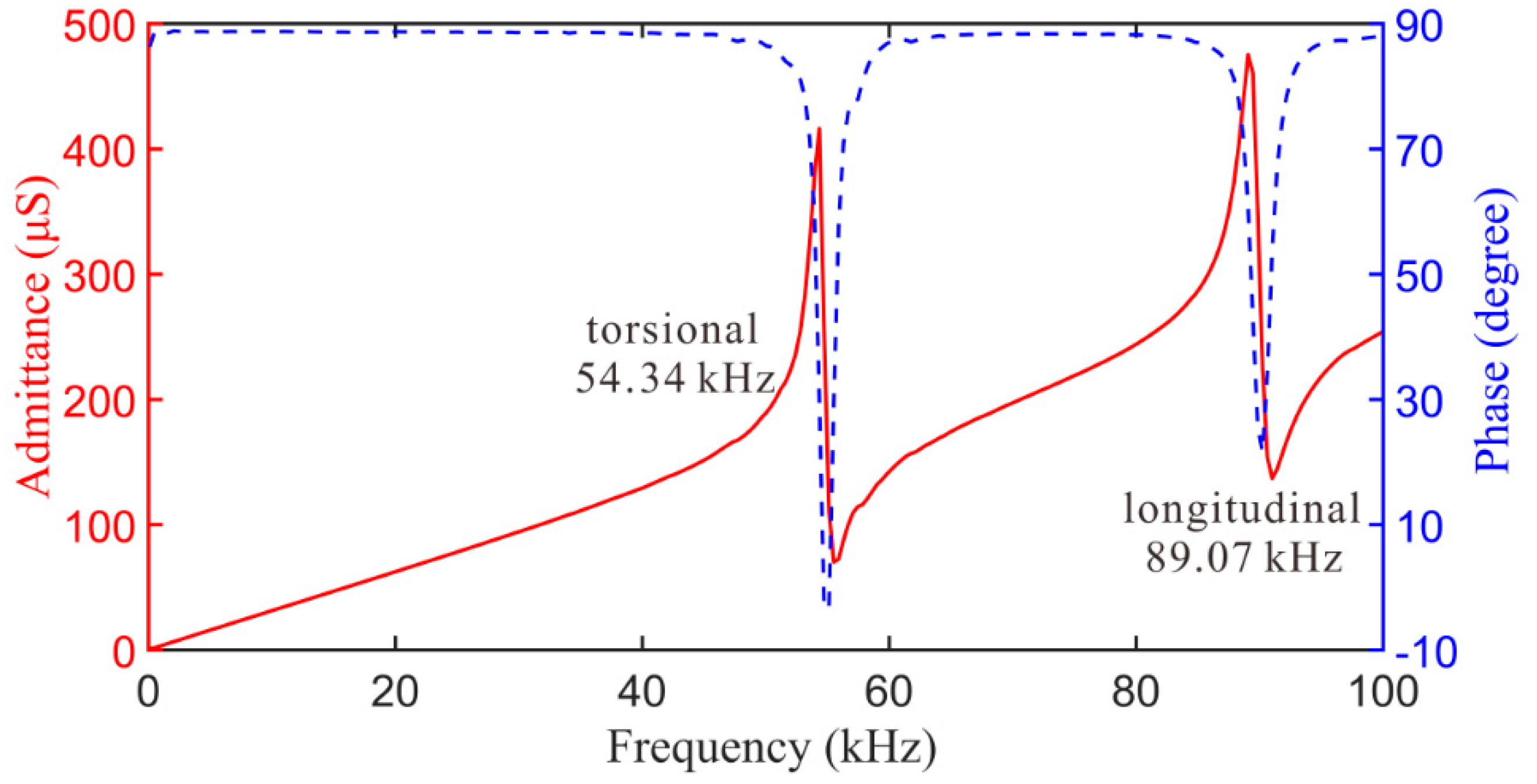
4.1. Dynamic Performance of the PA
4.2. Prototype Motor
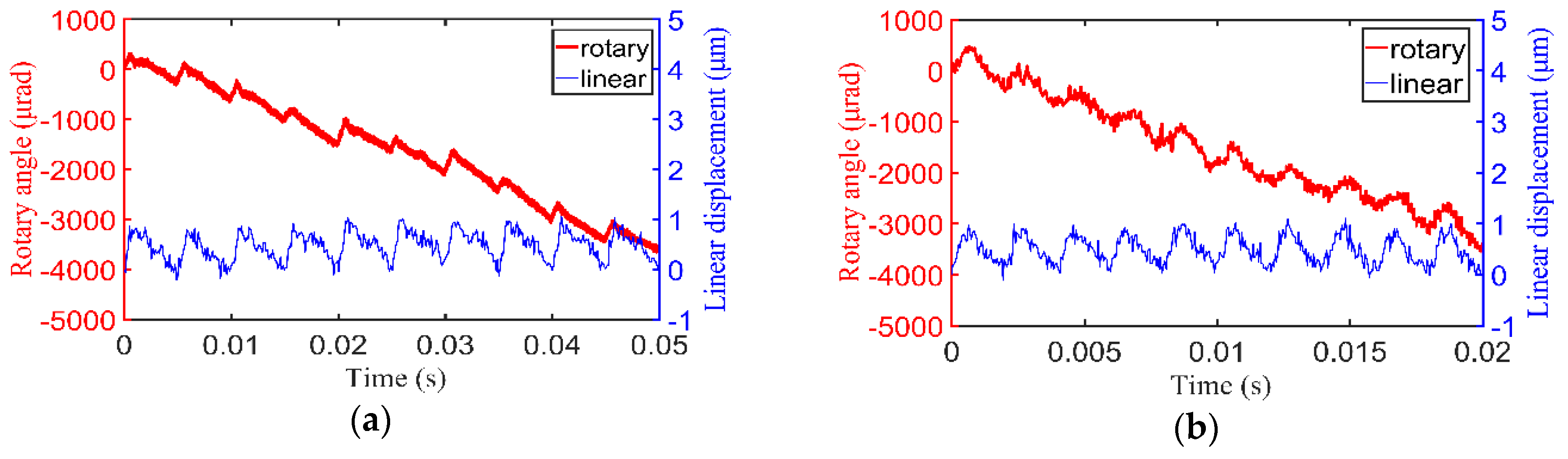
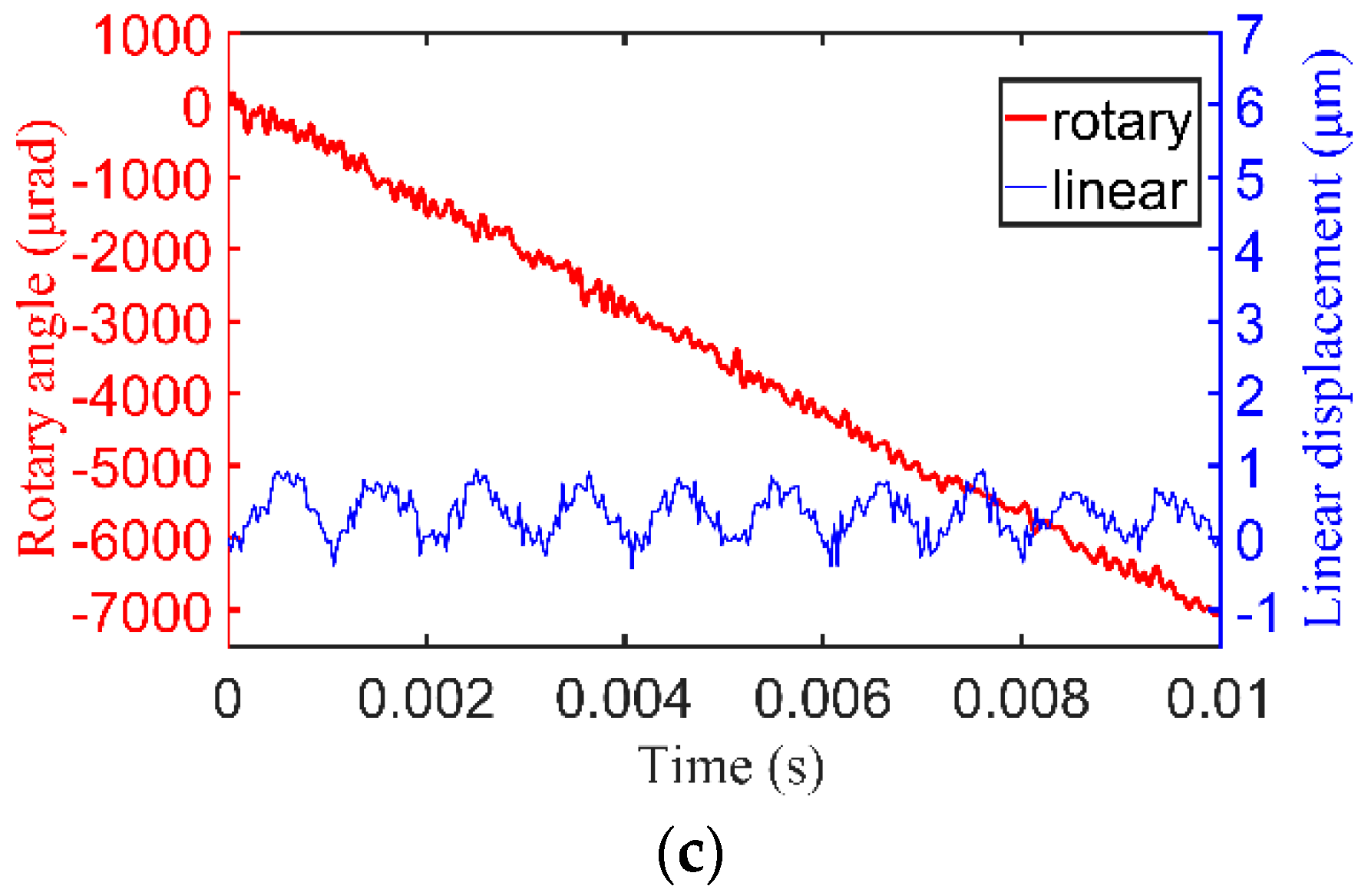
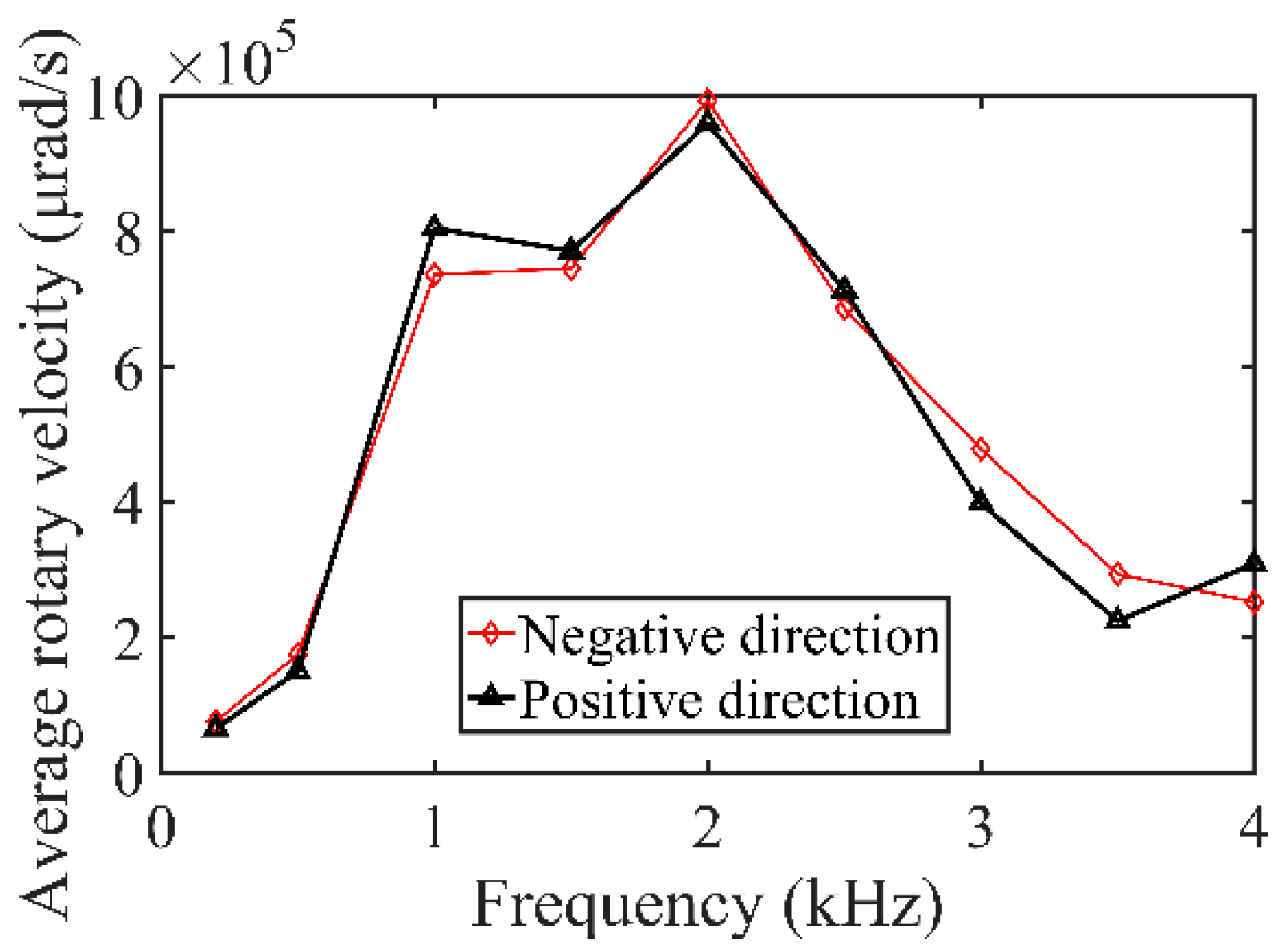
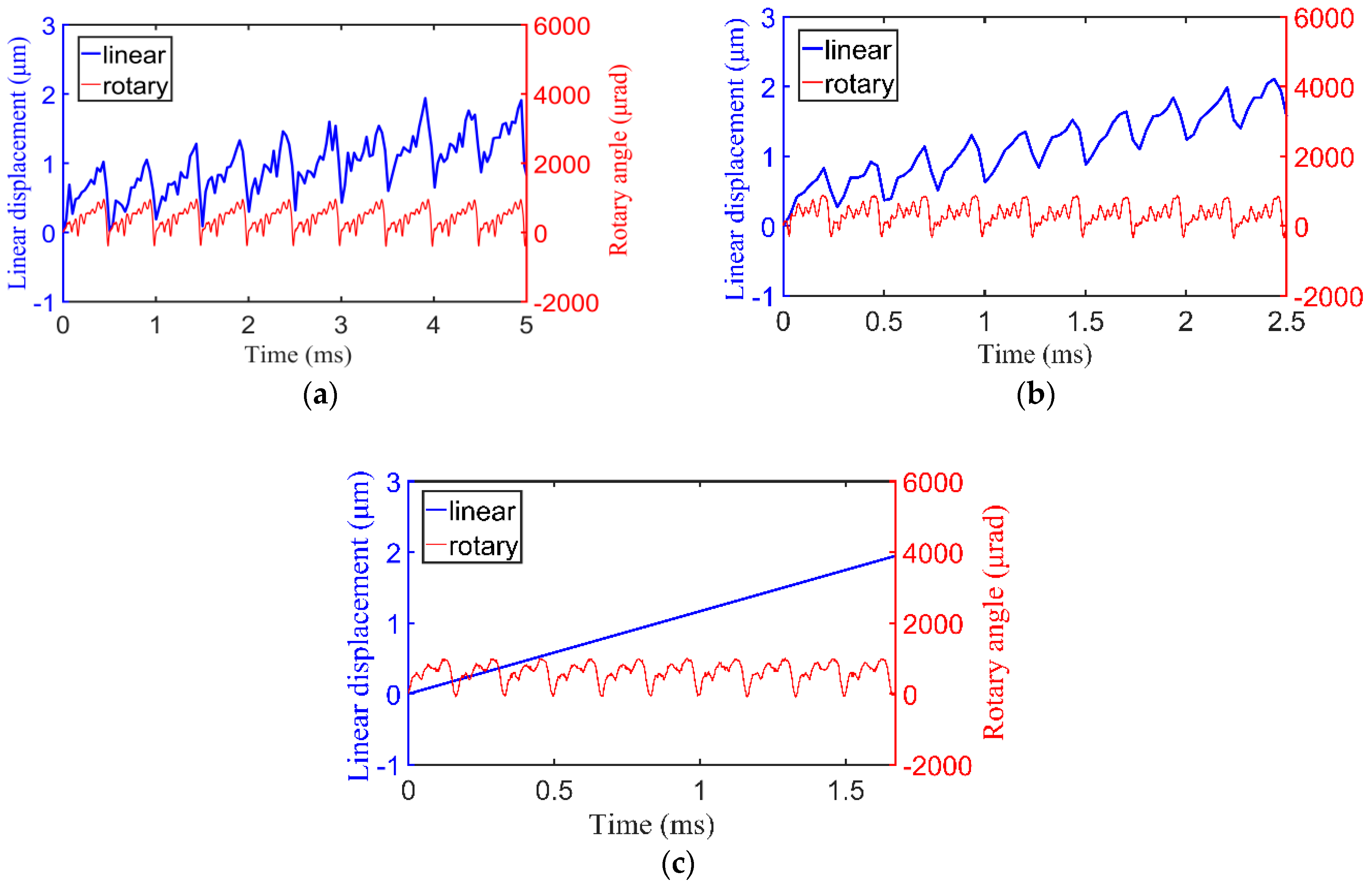
4.2.1. Rotary Motion of the Prototype Motor with No Load
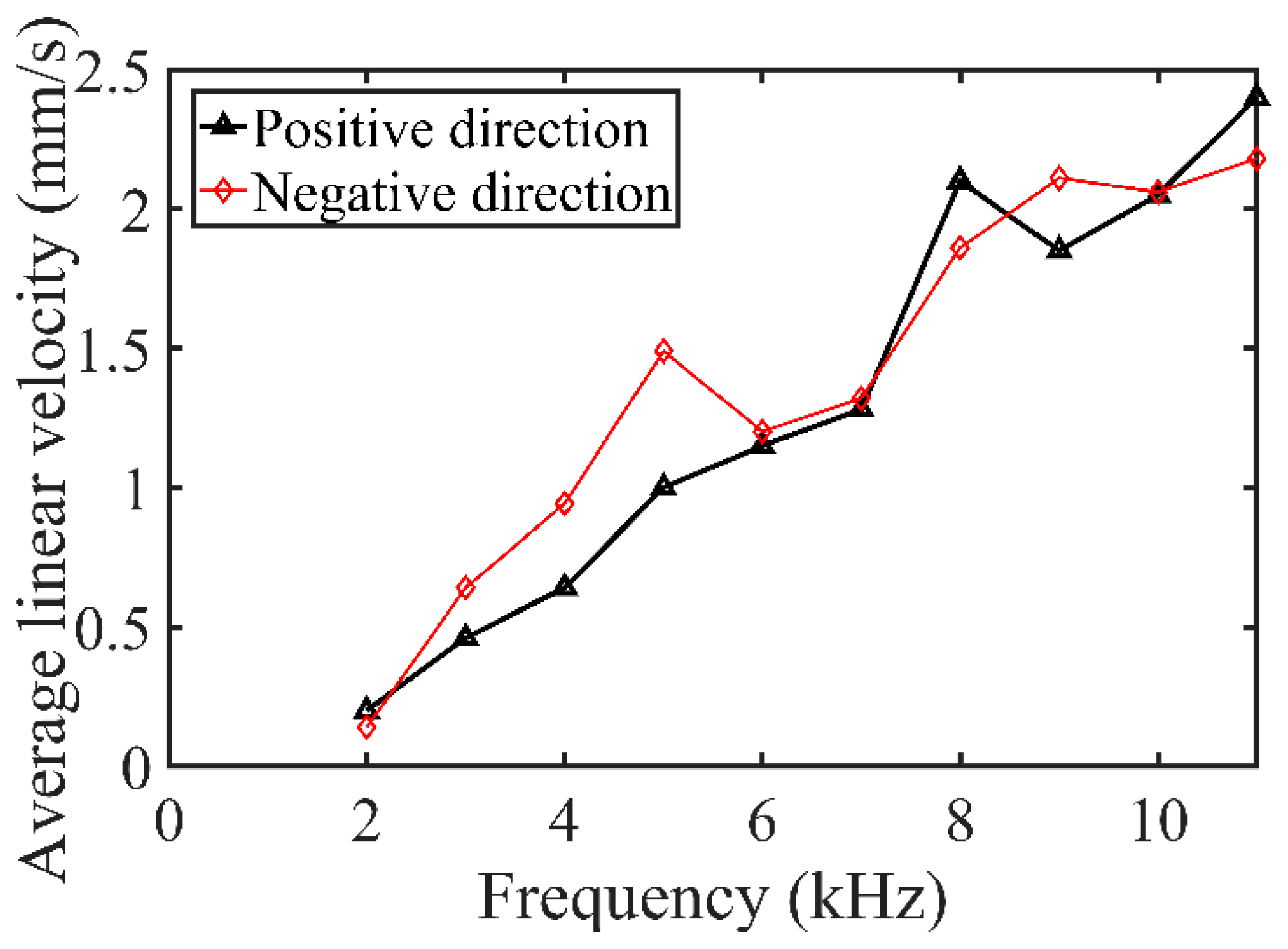
4.2.2. Linear Motion of the Prototype Motor with No Load
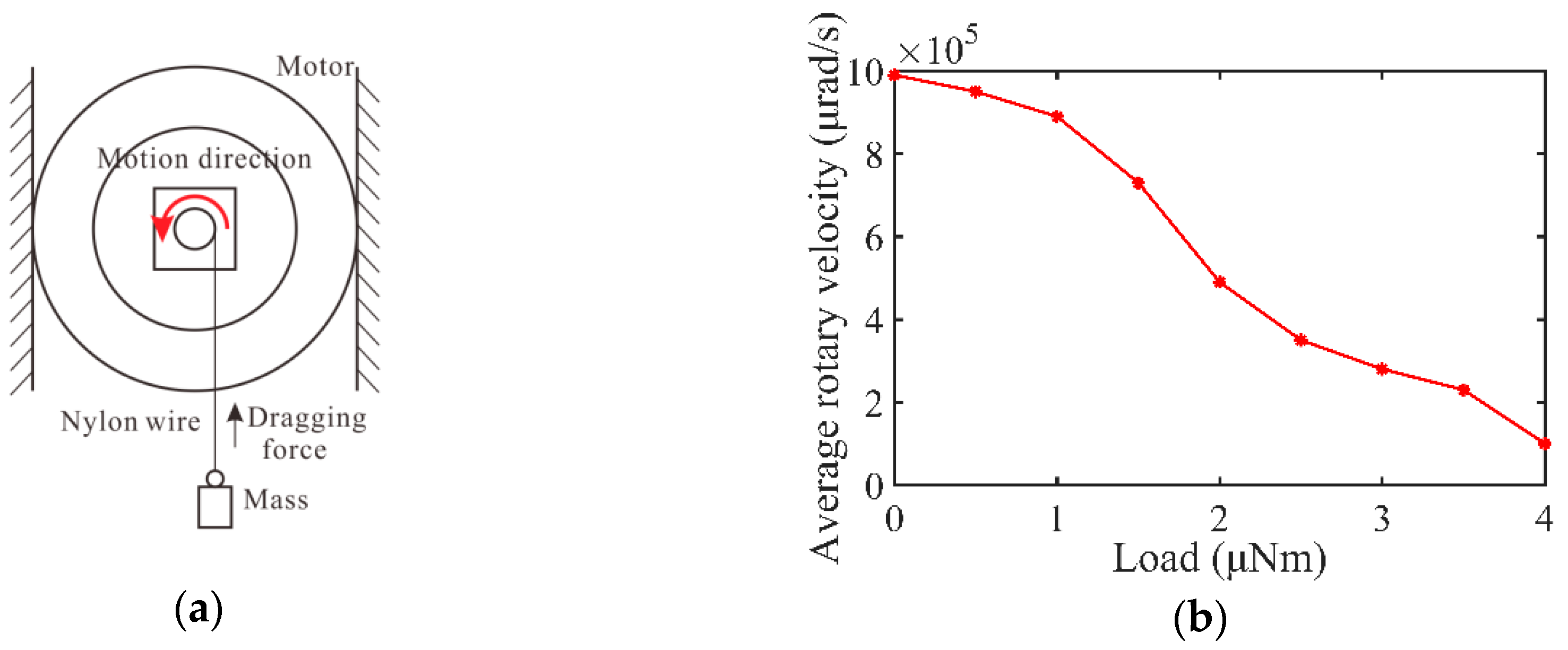
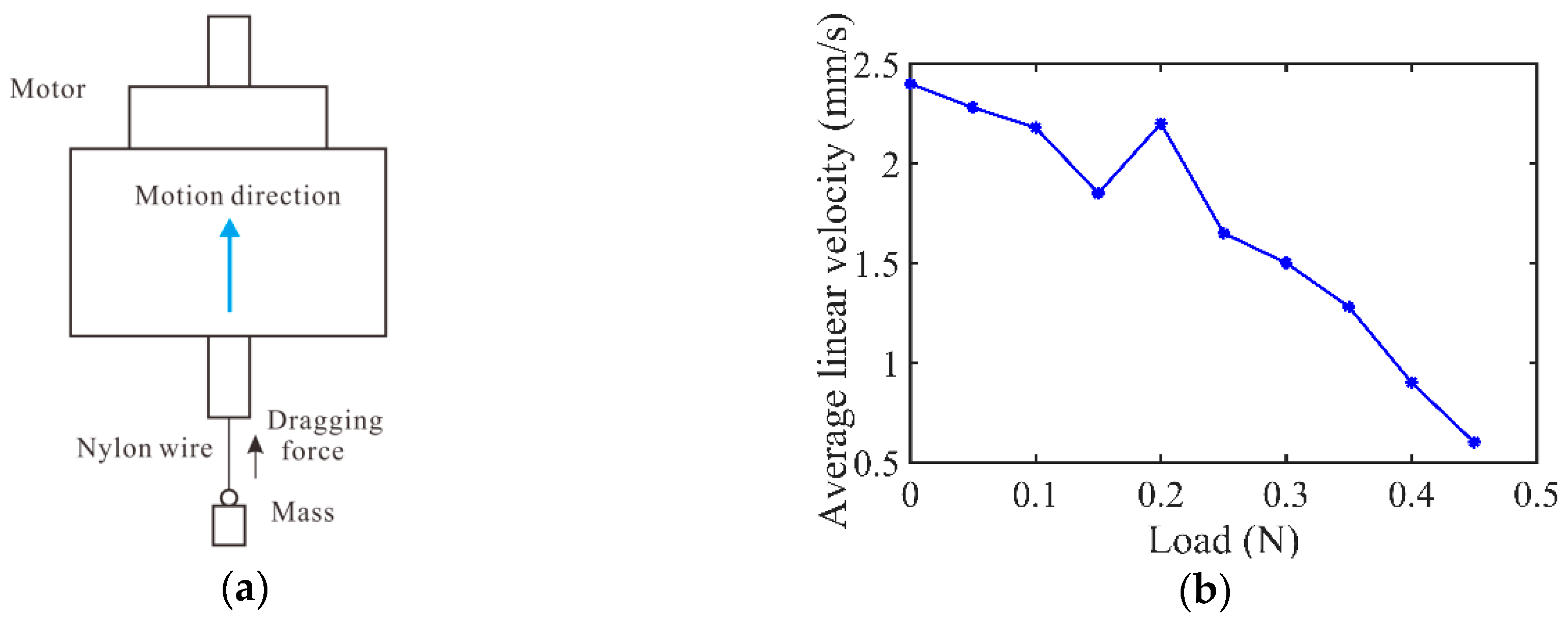
4.2.3. Load Capacity
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hunstig, M.; Hemsel, T.; Sextro, W. High-velocity operation of piezoelectric inertia motors: Experimental validation. Arch. Appl. Mech. 2016, 86, 1733–1741. [Google Scholar] [CrossRef]
- Wen, J.M.; Ma, J.J.; Zeng, P.; Cheng, G.M.; Zhang, Z.H. A new inertial piezoelectric rotary actuator based on changing the normal pressure. Microsyst. Technol. 2013, 19, 277–283. [Google Scholar] [CrossRef]
- Deng, J.; Liu, Y.X.; Chen, W.S.; Liu, J.K. Development and experiment evaluation of an inertial piezoelectric actuator using bending-bending hybrid modes. Sens. Actuators A Phys. 2018, 275, 11–18. [Google Scholar] [CrossRef]
- Han, W.X.; Zhang, Q.; Ma, Y.T.; Pan, C.L.; Feng, Z.H. An impact rotary motor based on a fiber torsional piezoelectric actuator. Rev. Sci. Instrum. 2009, 80, 273. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Liu, M.; Wang, Y.Z. A dual stage low power converter driving for piezoelectric actuator applied in micro mobile robot. Appl. Sci. 2018, 8, 1666. [Google Scholar] [CrossRef]
- Ru, C.; Pan, P.; Chen, R. The Development of Piezo-Driven Tools for Cellular Piercing. Appl. Sci. 2016, 6, 314. [Google Scholar] [CrossRef]
- Lee, S.W.; Ahn, K.G.; Ni, J. Development of a piezoelectric multi-axis stage based on stick-and-clamping actuation technology. Smart Mater. Struct. 2007, 16, 2354–2367. [Google Scholar] [CrossRef]
- Chen, W.M.; Liu, T.S. Modeling and experimental validation of new two degree-of-freedom piezoelectric actuators. Mechatronics 2013, 23, 1163–1170. [Google Scholar] [CrossRef]
- Guo, M.S.; Hu, J.H.; Zhu, H.; Zhao, C.S.; Dong, S.X. Three-degree-of-freedom ultrasonic motor using a 5-mm-diameter piezoelectric ceramic tube. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 1446–1452. [Google Scholar] [CrossRef]
- Peng, Y.X.; Ito, S.; Sakurai, Y.; YUki, S.M.; Gao, W. Construction and verification of a linear-rotary micro-stage with a millimeter-scale range. Int. J. Precis. Eng. Manuf. 2013, 14, 1623–1628. [Google Scholar] [CrossRef]
- Gao, W.; Sato, S.; Arai, Y. A linear-rotary stage for precision positioning. Precis. Eng. 2010, 34, 301–306. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, G.; Hesselbach, J. On development of a rotary–linear actuator using piezoelectric translators. IEEE/ASME Trans. Mechatron. 2006, 11, 647–650. [Google Scholar] [CrossRef]
- Sun, X.T.; Chen, W.H.; Zhang, J.B.; Zhou, R.; Chen, W.J. A novel piezo-driven linear-rotary inchworm actuator. Sens. Actuators A Phys. 2015, 224, 78–86. [Google Scholar] [CrossRef]
- Mashimo, T.; Toyama, S. Rotary-linear piezoelectric microactuator with a cubic stator of side length 3.5 mm. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 1825–1830. [Google Scholar] [CrossRef] [PubMed]
- Blackford, B.L.; Jericho, M.H. Simple two-dimensional piezoelectric micropositioner for a scanning tunneling microscope. Rev. Sci. Instrum. 1990, 61, 182–184. [Google Scholar] [CrossRef]
- Koc, B.; Cagatay, S.; Uchino, K. A piezoelectric motor using two orthogonal bending modes of a hollow cylinder. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2002, 49, 495–500. [Google Scholar] [CrossRef] [PubMed]
- Chu, X.C.; Wang, J.W.; Yuan, S.M.; Li, L.T.; Cui, H.C. A screw-thread-type ultrasonic actuator based on a Langevin piezoelectric vibrator. Rev. Sci. Instrum. 2014, 85, 065002. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Wang, L.; Cheng, T.; He, M.; Zhao, H.; Gao, H. A High-Thrust Screw-Type Piezoelectric Ultrasonic Motor with Three-Wavelength Exciting Mode. Appl. Sci. 2016, 6, 442. [Google Scholar] [CrossRef]
- Cheng, T.; Wang, L.; Yin, M.; Song, Z.; Zhu, D. Design and analysis of a cylindrical screw-type ultrasonic motor driven by six transducers. In Proceedings of the 2015 Symposium on Piezoelectricity, Acoustic Waves, and Device Applications (SPAWDA), Jinan, China, 30 October–2 November 2015. [Google Scholar] [CrossRef]
- Chang, L.K.; Tsai, M.C. Design of single-phase driven screw-thread-type ultrasonic motor. Rev. Sci. Instrum. 2016, 87, 055002. [Google Scholar] [CrossRef]
- Dong, L.; Zhang, L.; Kratochvil, B.E.; Shou, K.; Nelson, B.J. Dual-Chirality Helical Nanobelts: Linear-to-Rotary Motion Converters for Three-Dimensional Microscopy. J. Microelectromech. Syst. 2009, 18, 1047–1053. [Google Scholar] [CrossRef]
- Wen, B.H.; Liu, L.; Liu, S.Y.; Zheng, K.X.; Hua, L.; Wang, S. Analysis and Research of Force and Motion of Screw-Type Extrusion Molding Biomass. Adv. Mater. Res. 2013, 614–615, 452–459. [Google Scholar] [CrossRef]
- Jing, Q.S.; Zhu, G.; Wu, W.Z.; Bai, P.; Xie, Y.N.; Han, R.P.S.; Wang, Z.L. Self-powered triboelectric velocity sensor for dual-mode sensing of rectified linear and rotary motions. Nano Energy 2014, 10, 305–312. [Google Scholar] [CrossRef]
- Watson, B.; Friend, J.; Yeo, L. BRIEF COMMUNICATION: Piezoelectric ultrasonic resonant motor with stator diameter less than 250 µm: The Proteus motor. J. Micromech. Microeng. 2009, 19, 22001–22005. [Google Scholar] [CrossRef]
- Wajchman, D.; Liu, K.C.; Friend, J.; Yeo, L. An ultrasonic piezoelectric motor utilizing axial-torsional coupling in a pretwisted non-circular cross-sectioned prismatic beam. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 832–840. [Google Scholar] [CrossRef] [PubMed]
- Pan, C.L.; Feng, Z.H.; Ma, Y.T.; Shao, W.W.; Liu, Y.B. Coupled torsional and longitudinal vibrations of piezoelectric fiber actuator with helical electrodes. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 829–837. [Google Scholar] [CrossRef] [PubMed]
- Qi, Z.; Pan, C.L.; Ma, Y.T.; Kong, F.R.; Feng, Z.H. Piezoelectric rotary motor based on active bulk torsional element with grooved helical electrodes. IEEE/ASME Trans. Mechatron. 2012, 17, 260–268. [Google Scholar] [CrossRef]
- Pan, C.L.; Feng, Z.H.; Ma, Y.T.; Liu, Y.B. Small torsional piezoelectric fiber actuators with helical electrodes. Appl. Phys. Lett. 2008, 92, 012923. [Google Scholar] [CrossRef]
- Pan, C.L.; Ma, Y.T.; Liu, Y.B.; Zhang, Q.; Feng, Z.H. Torsional displacement of piezoelectric fiber actuators with helical electrodes. Sens. Actuators A Phys. 2008, 148, 250–258. [Google Scholar] [CrossRef]
- Han, L.L.; Zhao, H.N.; Xia, H.J.; Pan, C.L.; Jiang, Y.Z.; Li, W.S.; Yu, L.D. A compact impact rotary motor based on a piezoelectric tube actuator with helical interdigitated electrodes. Sensors 2018, 18, 2195. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Parameters | Value | Unit |
|---|---|---|---|
| Piezoelectric tube: PZT (YT-5L, Baoding Yitian Ultrasonic Technology co., LTD) | Piezoelectric coefficient (d31) | −195 | pC × N−1 |
| Piezoelectric coefficient (d33) | 450 | pC × N−1 | |
| Density | 7600 | kg × m−3 |
| Author | Zhang [12] | Sun [13] | Mashimo [14] | This Study |
|---|---|---|---|---|
| Principle | Impact | Inchworm | Ultrasonic | Impact |
| Main size (mm) | 40 × 55 (rotation part) 25 × 25 (translation part) | 88 × 88 × 72 | 3.5 × 3.5 × 3.5 | 15 × 15 × 40 |
| Driving voltage (V) | N/A | 140.0 | 118.8 | 720.0 |
| Maximum rotary velocity (μrad/s) | 2.0 × 105 | 34,270 | 2.4 × 107 | 9.9 × 105 |
| Output torque (μNm) | 1.22 × 104 | 7.35 × 104 | 2.5 | 4.0 |
| Maximum linear velocity (mm/s) | 7.32 | 1.45 | 80.0 | 2.4 |
| Output force (N) | 2.09 | 11.8 | 2.6 × 10−3 | 0.45 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, L.; Yu, L.; Pan, C.; Zhao, H.; Jiang, Y. A Novel Impact Rotary–Linear Motor Based on Decomposed Screw-Type Motion of Piezoelectric Actuator. Appl. Sci. 2018, 8, 2492. https://doi.org/10.3390/app8122492
Han L, Yu L, Pan C, Zhao H, Jiang Y. A Novel Impact Rotary–Linear Motor Based on Decomposed Screw-Type Motion of Piezoelectric Actuator. Applied Sciences. 2018; 8(12):2492. https://doi.org/10.3390/app8122492
Chicago/Turabian StyleHan, Liling, Liandong Yu, Chengliang Pan, Huining Zhao, and Yizhou Jiang. 2018. "A Novel Impact Rotary–Linear Motor Based on Decomposed Screw-Type Motion of Piezoelectric Actuator" Applied Sciences 8, no. 12: 2492. https://doi.org/10.3390/app8122492
APA StyleHan, L., Yu, L., Pan, C., Zhao, H., & Jiang, Y. (2018). A Novel Impact Rotary–Linear Motor Based on Decomposed Screw-Type Motion of Piezoelectric Actuator. Applied Sciences, 8(12), 2492. https://doi.org/10.3390/app8122492