1. Introduction
Over the past decades, vehicle suspension design has become an important research topic due to their attribution to improving ride comfort and handling stability of the vehicle body. Generally, the suspension system can be categorized into three types as passive suspension, semi-active suspension, and active suspension systems [
1,
2]. Passive suspensions comprise springs and dampers installed between the vehicle body and the wheel axle, which can achieve good ride comfort or good road holding since these two criteria conflict with each other. Semi-active suspensions can offer better improvement by adjusting their variable damping coefficients and just needs lower power consumption. It should be noted that electrorheological and magnetorheological fluid dampers are usually preferred in semi-active suspension systems. In the active suspension system, an additional actuator (linear motor, hydraulic cylinder, etc.) is installed to suppress its vibrations caused by the road irregularities. As compared with the passive suspension, the semi-active and active suspension are more easily combined with the advanced control algorithms such as
H∞ control [
3,
4], sliding-mode control [
5], adaptive backstepping control [
6,
7], T-S fuzzy control [
8,
9], and nonlinear control [
10,
11], wherein a good trade-off between the two conflicting suspension performances as ride quality and handling stability can be made. However, these control schemes are all based on the assumption that all of the components of vehicle suspension system work under the non-fault model, which is inconsistent with the actual application scenario [
12,
13] in some ways. With the growing demand for safety, reliability, and maintainability in the vehicle suspension system, it is necessary to develop a comprehensive fault-tolerant control (FTC) scheme to maintain a desirable system performance whether there occurs a fault in active suspension system or not.
It is well demonstrated in the previous studies [
14,
15] that FTC possesses the ability to accommodate failures automatically and then maintains a stability and sufficient level of system performance. In general, there are two types of fault-tolerant control approaches named as the passive and active ones. It should be noted that these two fault-tolerant control methods usually employ different design methodologies for the same control plants and will result in some unique properties. On the one side, for the development of the passive FTC scheme, a robust controller is often designed to deal with all the underlying faults. For instance, the authors in [
16] proposed a sliding mode fault-tolerant control scheme for a nonlinear system guaranteeing the asymptotic stability of the control system under faults, yet it still possessed disadvantages like large chattering, which imposes some restrictions in its practical applications. In addition to this, a robust
H∞ fault tolerant controller was developed to maintain the stability and constraint performance of an active suspension system with the bounded actuator faults [
17]. Moreover, some related research can also be found in [
18,
19]. Specifically, an adaptive fault tolerant controller is proposed in [
20] for an active suspension system with unknown actuator faults, which ensures the boundedness of the vertical and pitch angle displacements. It was noted that the aforementioned passive FTC approaches were only reliable for the specific system faults encountered in the system operation, wherein the designed FTC may not possess a better control performance under all kinds of faults.
On the other hand, when designing active FTC schemes, it is usually aimed at ensuring the system stability with an acceptable constraint performance by reconfiguring the on-line controller with the fault detection and diagnosis (FDD) system, which can estimate and compensate for the system fault and has been used in many areas [
21,
22,
23,
24,
25,
26,
27]. In [
25], a specific actuator failure for the three-tank system was first detected and confirmed by a fault diagnosis unit, the control law was then reconfigured based on the information of the detected fault. Both the stability and the acceptable
H∞ disturbance attenuation level were guaranteed for the closed-loop system using the remaining reliable actuators. Besides, a new FTC algorithm for an automotive air suspension control system has been developed in [
26], where the fault detection, diagnosis, and management of a closed-loop air suspension control system are included to enhance the robustness of the fault detection and isolation against uncertainties. However, only the height sensor faults are considered and it is of high cost in practical engineering applications. The authors in [
27] developed an FTC algorithm for vehicle active suspension systems in finite-frequency with a sine wave input fault and a new
H∞ FTC controller was developed based on a GIMC (Generalized Internal Mode Control) structure by ignoring the design of the fault diagnosing system. However, the fault model is less convincing and hard to be applied in reality. Thus, it is still a challenging issue to make the related FTC scheme in the active suspension system.
Motivated by the aforementioned research and discussion, this paper investigates the problem of observer-based active fault-tolerant control design for a half-vehicle active suspension system subjected to the actuator fault as the nonzero offset fault. The system augmentation technique and Lyapunov stability theory were introduced to design the fault tolerant controller. The key contributions of this work are summarized as follows.
First, a comprehensive control scheme of active fault tolerant controller was constructed for an active suspension system, which can not only deal with the desirable performance control for active suspension system without the actuator faults, but also achieve a way for ensuring the system performance when actuator faults occur.
Second, a robust observer was designed to make an accurate estimation of the fault information with the auxiliary diagnosis system and to further develop an H∞ fault compensation controller, such that the closed-loop control system can eliminate the negative effects of the actuator faults on vehicle suspension performances.
Finally, some illustrative examples were provided to demonstrate the validity of the control scheme proposed in this paper.
The rest of this paper is organized as follows:
Section 2 presents system modeling problem formulation for active suspension system with the general faults. The proposed robust observer-based active fault-tolerant controller design is presented in
Section 3. In
Section 4, the simulation investigation is provided to demonstrate the effectiveness of the designed controller. The conclusions are given in
Section 5.
2. System Modelling and Problem Statement
2.1. Generalized Fault Model of Active Suspension System
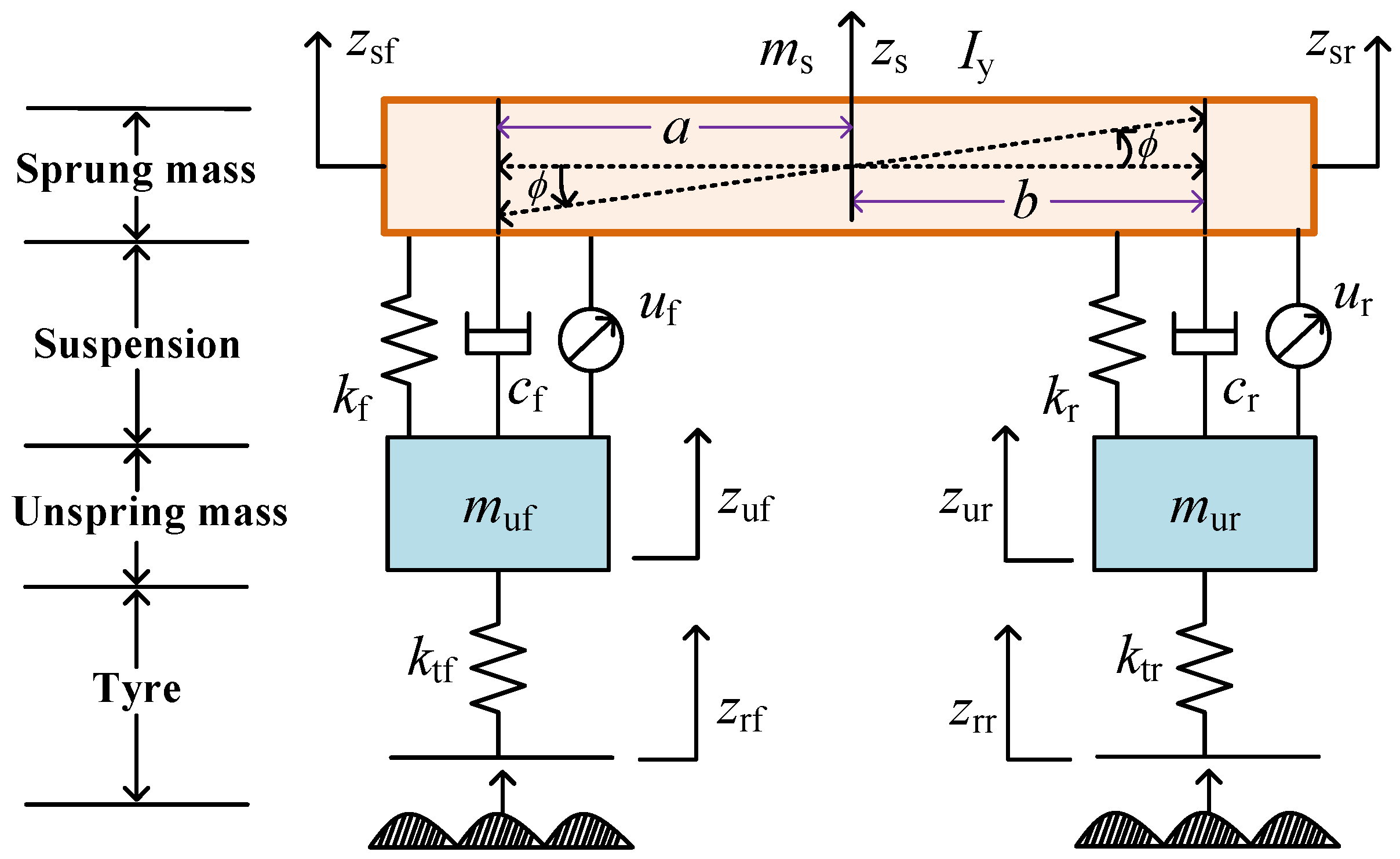
A half-vehicle suspension model with four DOFs (degree-of-freedoms) is shown in
Figure 1, in which,
ms an
Iy denote the sprung mass and its moment of inertia,
zs and
denote the vertical and pitch angular displacement at the center gravity (CG) of the vehicle body, respectively;
a and
b denote the horizontal distances from the CG of the vehicle body to the front and rear axles, respectively;
muf and
mur denote the unsprung mass of the front and rear suspension, respectively;
cf and
cr represent the damping coefficients of the front and rear suspension, respectively;
kf and
kr represent the stiffness coefficients of the front and rear suspension, respectively;
zsi,
zui, and
zri (
i = f, r, stands for the front and rear suspension) denote the suspension vertical displacements of the sprung and unsprung mass, and the road disturbance inputs to the front and rear wheels, respectively;
uf and
ur represent the control forces of the front and rear suspension, respectively. Ignoring the damping characteristics of tires,
ktf and
ktr denote the tire stiffness coefficients of the front and rear wheels, respectively.
It was assumed that the front and rear wheels had the same road excitation signals, thus the vertical displacements of the front and rear suspension sprung masses had the following relationship with a smaller pitch angular
as [
28]
Based on Newton’s second law, the dynamics equations of the half-vehicle suspension system was written as follows:
Define the state vector as
, the disturbance input as
, the control input as
, the control output as
, and the measured output as
, wherein
and
represent the vertical and pitch angular accelerations of the vehicle body, respectively;
and
represent the vertical and pitch angular velocities of the vehicle body, respectively;
and
represent the dynamic deflections of the front and rear suspension, respectively. Then, the system state-space equation of half-vehicle suspension was given by
where
A,
B,
Bd,
C1,
C2, and
D2 were the matrices with appropriate dimensions to be determined, which are expressed in
Appendix A.
It is widely accepted that the fault has the characteristic of randomness, fuzziness, and unpredictability. The common faults like actuator jam or offset in sensor outputs were firstly tested in the experiment bench and were then modeled in a finite parameter family as a constant gain fault or slow drift fault [
29]. Without loss of generality, the following exosystem was used to describe the actuator fault model as [
30,
31]
where
xf denotes the state vector of the fault model,
δ(
t) denotes the virtual input signal with the bounded
L2 norm. It should be noted that the auxiliary fault diagnosis system was needed to confirm the value of the coefficient matrix and
δ(
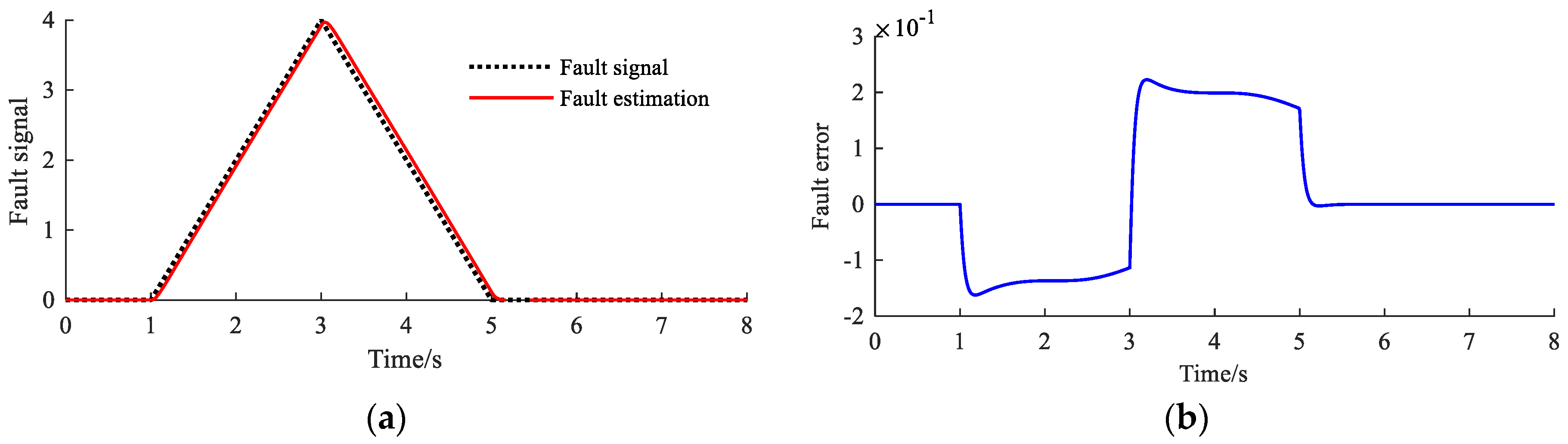
t). In brief, this paper adopted the random ramp signal to describe the actuator fault
f(
t). Let the coefficient matrix be
Awf = 0,
Bwf =
I,
Cwf =
I and
δ(
t) satisfying:
where
tf and
βf stand for the occurring time and the amplitude of the suspension fault. It is noted that an arbitrarily random ramp signal could be generated by tuning the value of
tf and
βf.
Combining (3) and (4) yields the state-space equations of the half-vehicle suspension system with the generalized actuator faults as:
where
Bf and
D2f are the known matrices with appropriate dimensions, and there exists a known gain matrix
M satisfying [
]
T = [
]
TM [
26]. It is noted that when
f(
t) = 0, the active suspension system works under normal operations, and when
f(
t) ≠ 0, it can be confirmed that there occurs some actuator faults in the active suspension system.
2.2. Problem Statement of Active Fault-Tolerant Control
For the active suspension system in (6), our main objective was to develop a fault-tolerant controller to improve the vehicle dynamics performance in the presence of the actuator faults and the external road disturbance. The proposed control scheme for this active suspension system is shown in
Figure 2.
As shown in
Figure 2, when the system (6) has no fault, that is,
f(
t) = 0, the
H∞ output feedback controller works as the proposed active FTC scheme, which can guarantee a better control performance of vehicle suspension system. When there are some systematic faults in (6), i.e.,
f(
t) ≠ 0, the proposed active FTC scheme is composed of the
H∞ output feedback controller and
H∞ observer-based fault compensation controller, in which the fault compensation controller is employed to observe and estimate the fault information and further, to design the fault compensative control law to eliminate the effects of the faults on vehicle suspension system performances. At the same time, the
H∞ output feedback controller starts to work so as to ensure that the closed-loop system is stable and robust to the external disturbance inputs. In this control scheme, both of the fault compensation controller and robust
H∞ output feedback controller work together to achieve the active fault-tolerant control for active suspension system (6).
To sum up, the designed active fault-tolerant controller is formed as:
where
uN(
t) is the control law of
H∞ output-feedback controller, and
uC(
t) is the control law of fault compensation controller.
Substituting (7) into (6) gives the closed-loop system as:
Therefore, the control objective in this article can be defined as: For the system (8), one can design uC(t) = to make BuC(t) + Bff(t) = 0, and D2uC(t) + D2ff(t) = 0, thus to compensate for the performance penalties caused by the actuator faults. Moreover, the control law uN(t) = K(s)y(t) is designed to ensure the asymptotic stability of the closed-loop system (8). It should be noted here that is the estimation of f(t).
To fulfill the fault estimation and compensation, substituting (4) into (6) yields the following augmented system as:
where
It is assumed that in the augmented system (9), (
Aef,
Bef) is controllable, and (
Cef,
Aef) is measurable, thus an augmented observer can be constructed to detect the system state and fault signal information after the system faults occur, and the full-order state observer of the system (9) is then expressed as:
where
and
L are the state vector and gain matrix for the augmented observer, respectively.
From (9) and (10), we have
Synthesizing (8) and (13) gives the active fault-tolerant control system of half-vehicle suspension as follows:
where
Bw = [
Bd 0].
Through establishing the augmented system (14), the design of active FTC control scheme can be transformed into solving the gain vector L of the fault observer and the control law uN(t) of H∞ output-feedback controller by satisfying the following performance conditions:
(a) The closed-loop system (14) is asymptotically stable.
(b) Under zero initial conditions, , supposing that the transfer function from the disturbance input to the fault error is (s), solving L makes the system (13) satisfying H∞ performance index ||(s)|| < β.
(c) Under zero initial conditions, , supposing that the transfer function from the disturbance input to the control output is Tzw(s), solving uN(t)=K(s)y(t) makes the system (13) satisfying ||Tzw(s)||∞< λ.
To facilitate the following descriptions and our fault-tolerant controller design, Lemma 1 was introduced.
Lemma 1 ([32]). Consider the following linear time-invariant system Given a positive constant γ, if there exists a positive definite matrix P > 0 satisfying Thus, the system (15) will reach the asymptotical stability and the inequality ||z(t)||2 < γ||w(t)||2 holds under zero initial condition.
3. Robust H∞ Fault-Tolerant Controller Design
From the aforementioned discussions, the proposed active fault-tolerant control scheme was composed of two sub-controllers, that is, the H∞ weighed output feedback controller and H∞ observer-based fault compensation controller, which are demonstrated in detail, in this section.
3.1. The Design of H∞ Fault Compensation Controller
Based on the above discussion in
Section 2.2, the proposed
H∞ observer-based fault compensation controller can be summarized as Theorem 1.
Theorem 1. Consider the full-order state observer of active suspension system in (13), given a positive constant β, if there exist positive matrices P1 and Y1 with appropriate dimensions, such that the following linear matrix inequalities (LMIs) hold: Thus, there exists a gain matrix L = P1−1Y1 for the designed observer satisfying the following performance conditions:
(a) The closed-loop system (13) is asymptotically stable
(b) Under zero initial conditions, the H∞ performance index ||(s)|| < β is satisfied.
From Equation (10), the fault compensation control law is designed as: Proof. By applying Lemma 1 to the closed-loop system (13), we have:
Based on Lemma 1, the closed-loop system (13) is asymptotically stable and the
H∞ performance index ||
(s)|| <
β is satisfied under a zero initial condition if and only if there exists
P1 > 0 such that inequality (19) holds, and (19) can be further written as:
Let Y1 = P1L, we can get that (20) is equivalent to (17), and the gain matrix L of the fault compensation observer is given by L = P1−1Y1. The proof is completed. □
3.2. The Design of H∞ Weighted Output Feedback Controller
Because it is easy to measure the output variable
y(
t) with an explicit physical property, the weighed
H∞ output feedback controller is developed in this paper to improve the vehicle dynamics performances, the control block of which is shown in
Figure 3, where
is the disturbance input,
Sw is the weighted coefficient matrix of
,
G(
s) is the transfer function of the closed-loop system (14),
K(
s) is the weighted
H∞ output feedback controller to be designed,
Wz and
Sz are the weighted transfer function matrix and coefficient matrix of control output
z(
t), respectively,
uN(
t) =
K(
s)
y(
t) is the weighted
H∞ output feedback control law satisfying [
33]:
In Equation (21), is the state vector of the desirable H∞ weighted output feedback controller, and Ac, Bc, Cc, and Dc are the parameter matrices of the designed controller.
Substituting (21) to (14), we can obtain the active fault-tolerant control system of the half-vehicle suspension system as [
33]:
where
is the state vector of the augmented system (22), and the corresponding coefficient matrices are as follows:
Now, the objective of the controller design is converted into solving the coefficient matrix Acl, Bcl, Ccl, and Dcl to guarantee the asymptotic stability of the closed-loop system (22), and the H∞ norm ||T(s)||∞ of the system (22) is bounded by λ. It was noted that the parameter matrices Ac, Bc, Cc and Dc could be obtained by using the MATLAB internal function hinflmi (2017a, The MathWorks, Inc., Natick, MA, USA) to obtain the control law uN(t). Subsequently, substituting Ac, Bc, Cc and Dc into Acl, Bcl, Ccl and Dcl could yield to the active fault-tolerant control system (18).
According to ISO2631-1:1997 (E) criteria, the human body is more sensitive to the vertical vibrations of 4–12.5 Hz and the horizontal vibrations of 1–2 Hz. In order to improve the ride comfort in these two specific frequency ranges, the weight functions shown in (23) and (24) were selected to achieve the corresponding frequency attenuation [
33].
Thus, the weighting transfer function matrix was defined as Wz = diag(W1, W2, 1, 1, 1, 1). Additionally, the weighting coefficient matrix of the interference input and the controlled output was obtained as Sw = diag(0.0014, 0.0014, 1, 1), Sz = diag(6, 3, 20, 20, 0.15, 0.15) after iterative trial calculations.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}