A Novel Tempogram Generating Algorithm Based on Matching Pursuit



Abstract
:Featured Application
Abstract
1. Introduction
2. Related Work
2.1. Autocorrelation Function
2.2. Fourier Transform
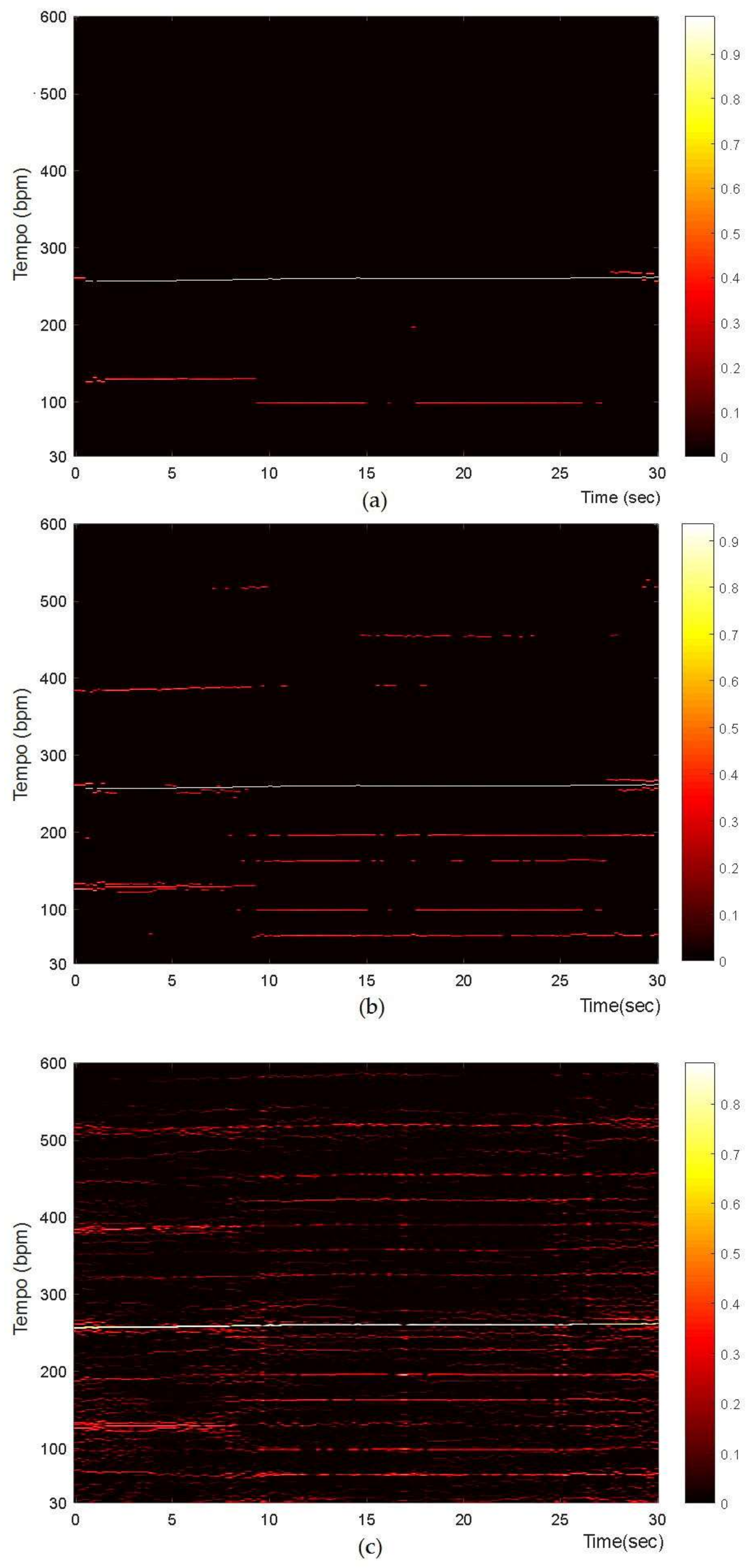
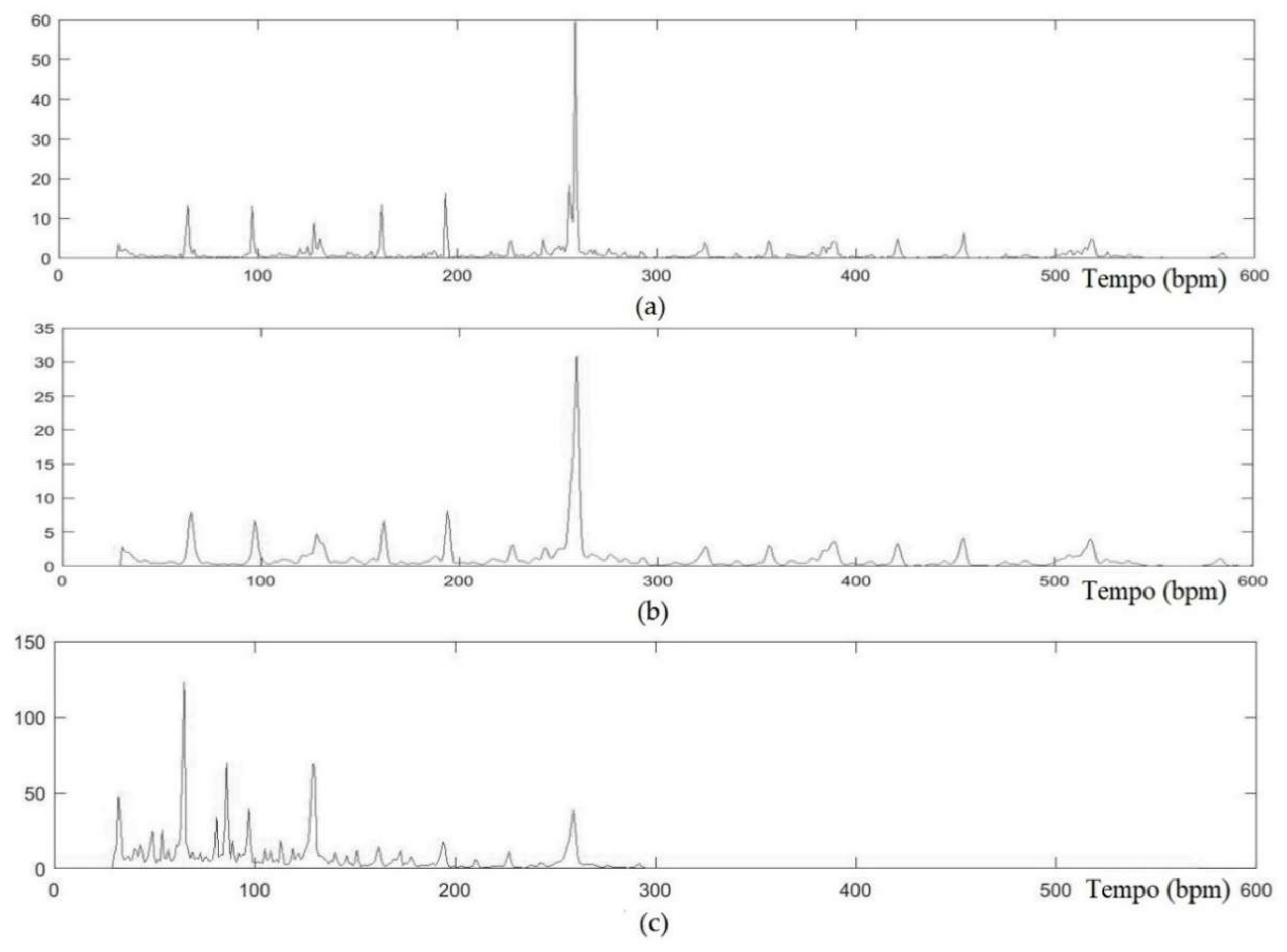
3. Tempogram Based on Matching Pursuit
3.1. Motivation
3.2. Tempo Dictionary
3.2.1. Choose Tempo Band and Transform Tempo Set to Frequency Set
3.2.2. Create the Mother Tempo Atom for Every Tempo
3.2.3. Shift the Mother Tempo Atom to Generate a Series of New Atoms
3.2.4. Set up the Set of Atoms for Every Tempo
3.2.5. Merge All the Sets of Atoms to Make up a Tempo Dictionary
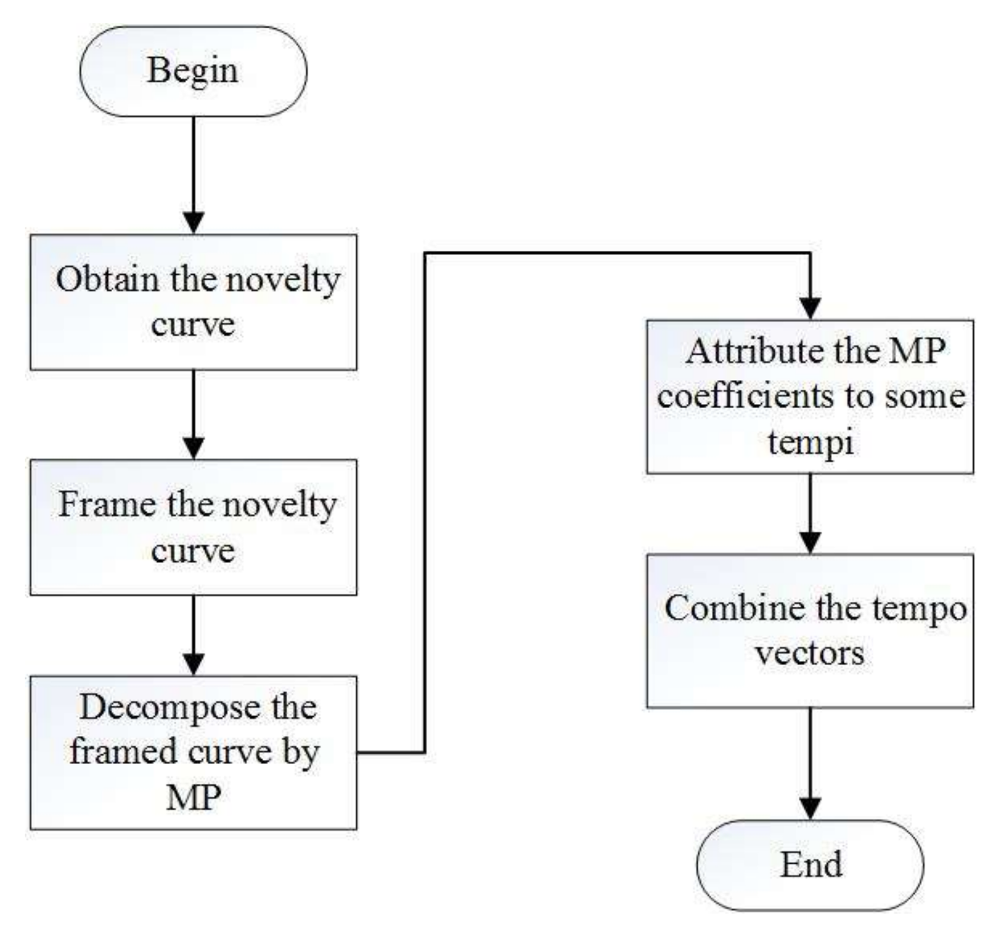
3.3. Algorithm Implementation
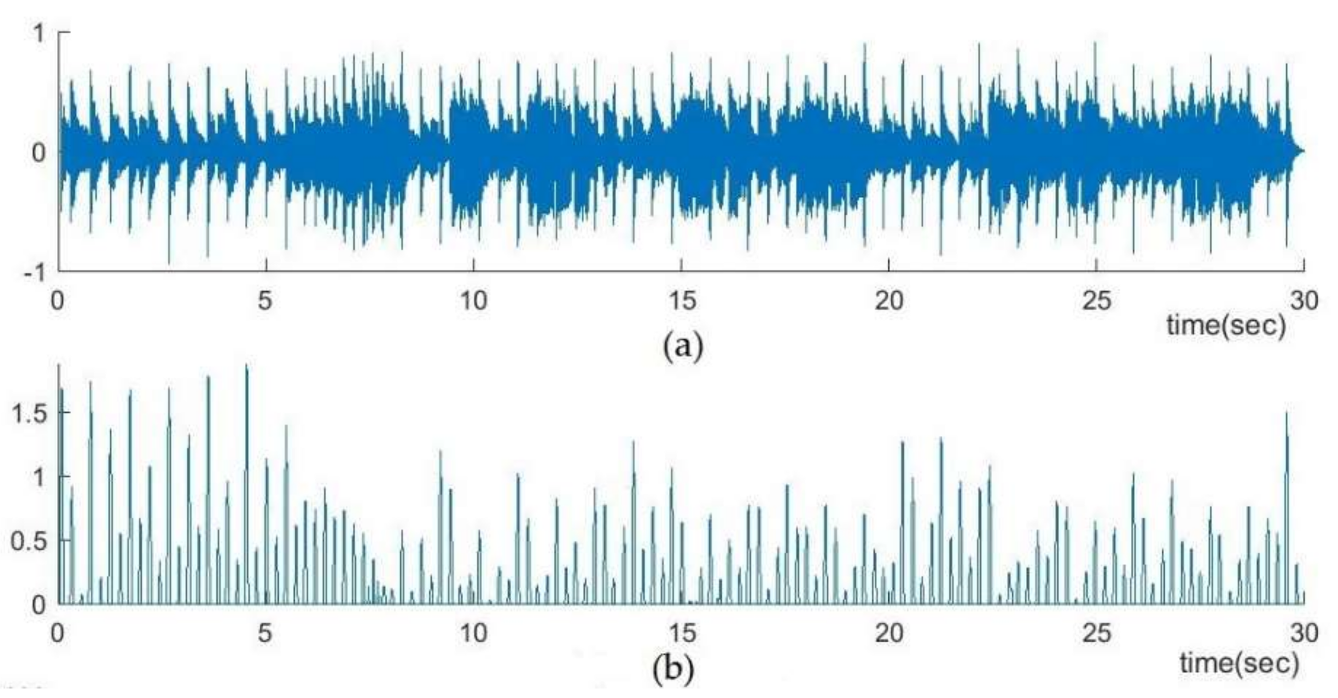
3.3.1. Obtain the Novelty Curve from the Musical Signal
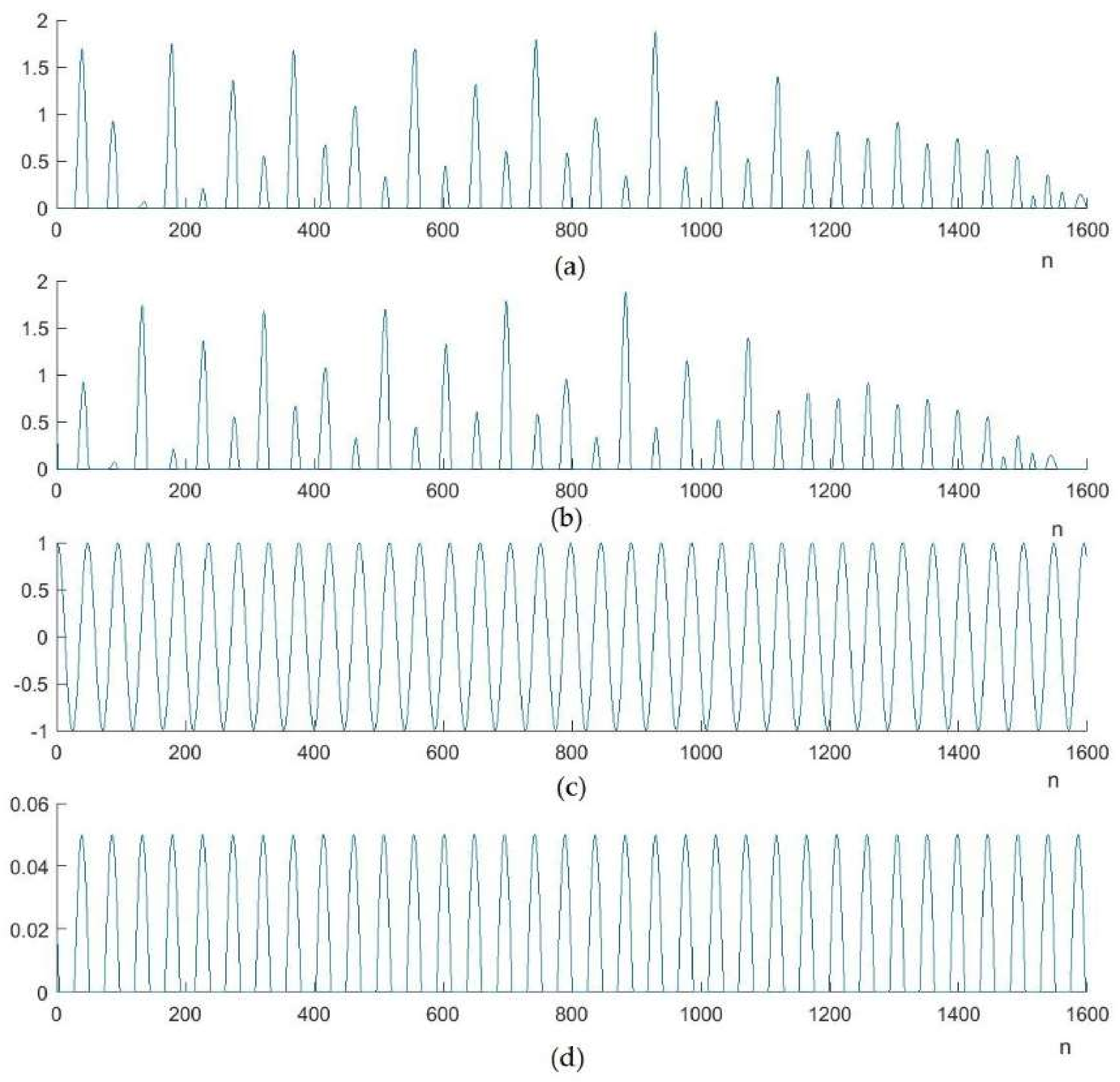
3.3.2. Frame the Novelty Curve
3.3.3. Decompose the Framed Novelty Curve by MP Using Tempo Dictionary
- Initialize the residual signal and the iteration count: ;
- Compute the inner product between the residual signal and each of the tempo atom : ;
- Choose the maximum absolute value of the inner products , where is the corresponding atom, and save and as the iteration result;
- Compute the residual signal ;
- If then and go back to step 2, else stop iteration.
3.3.4. Attribute the MP Coefficients to Some Tempi
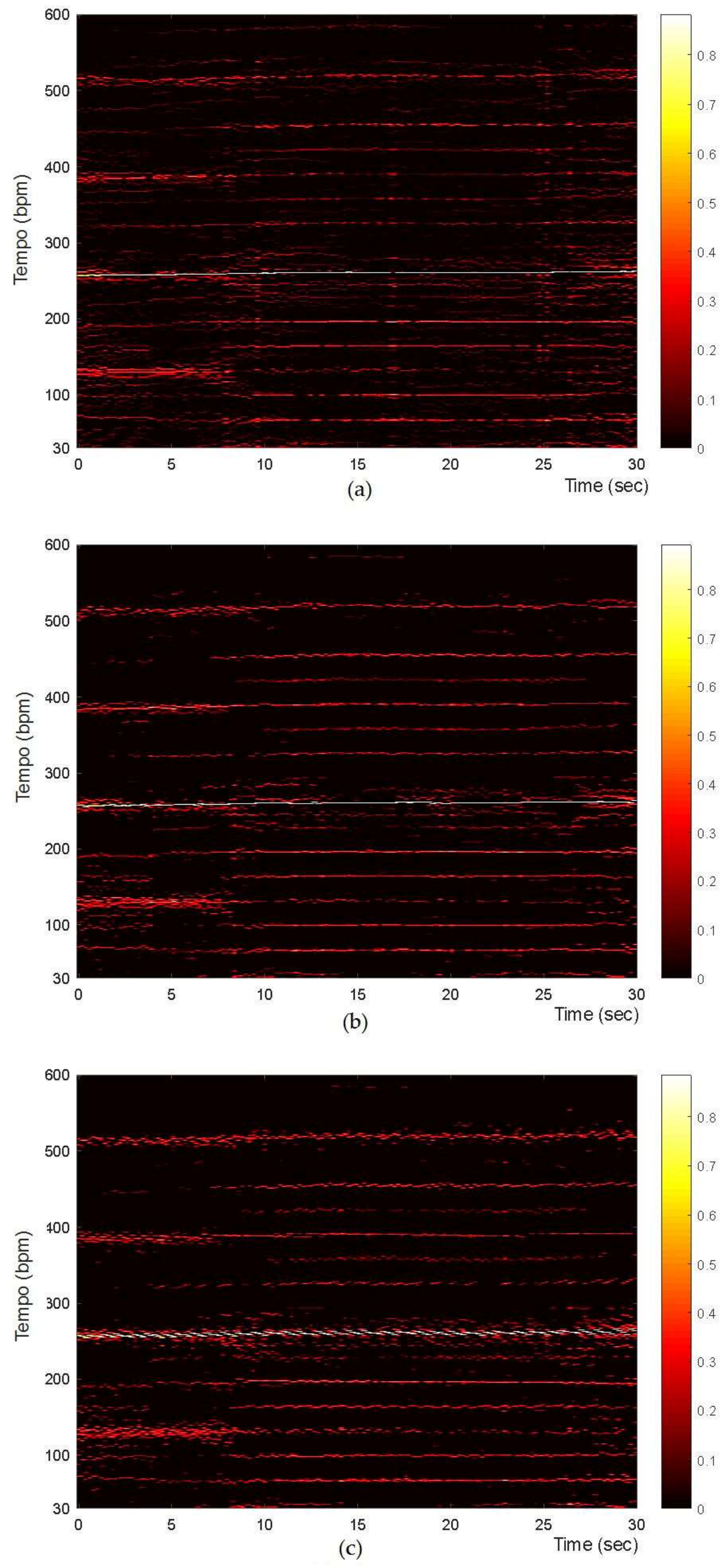
3.3.5. Generate Tempogram
4. Discussion
4.1. Tempo Resolution
4.2. Similarity
4.3. Sparsity
4.4. Flexibility
4.4.1. Flexibility of Tempo Resolution
4.4.2. Flexibility of Sparsity
4.4.3. Flexibility of FFMTC
5. Application Example
5.1. Compute the Tempo Curve
5.2. Smooth the Tempo Curve
5.3. Modify the Tempo Curve by the Comb Template
5.4. Choose Two Dominant Tempi as the Estimation Result
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wikipedia. Tempo. Available online: https://en.wikipedia.org/wiki/Tempo (accessed on 10 December 2017).
- Durand, S.; Bello, J.; David, B.; Richard, G. Robust downbeat tracking using an ensemble of convolutional networks. IEEE/ACM Trans. Audio Speech Lang. Process. 2017, 25, 76–89. [Google Scholar] [CrossRef]
- Elowsson, A. Beat tracking with a cepstroid invariant neural network. In Proceedings of the 17th ISMIR Conference, New York, NY, USA, 7–11 August 2016. [Google Scholar]
- Mottaghi, A.; Behdin, K.; Esmaeili, A.; Heydari, M.; Marvasti, F. Obtain: Real-time beat tracking in audio signals. arXiv, 2017; arXiv:1704.02216. [Google Scholar]
- Tian, M.; Fazekas, G.; Black, D.A.A.; Sandler, M. On the use of the tempogram to describe audio content and its application to music structural segmentation. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brisbane, QLD, Australia, 19–24 April 2015. [Google Scholar]
- Gkiokas, A.; Katsouros, V.; Carayannis, G. Towards multi-purpose spectral rhythm features: An application to dance style, meter and tempo estimation. IEEE/ACM Trans. Audio Speech Lang. Process. 2016, 24, 1885–1896. [Google Scholar] [CrossRef]
- Kartikay, A.; Ganesan, H.; Ladwani, V.M. Classification of music into moods using musical features. In Proceedings of the International Conference on Inventive Computation Technologies (ICICT), Coimbatore, India, 26–27 August 2016. [Google Scholar]
- Grosche, P.; Müller, M.; Kurth, F. Cyclic tempogram—A mid-level tempo representation for musicsignals. In Proceedings of the 2010 IEEE International Conference on Acoustics Speech and Signal Processing (ICASSP), Dallas, TX, USA, 14–19 March 2010; pp. 5522–5525. [Google Scholar]
- Wu, F.-H.F. Musical tempo octave error reducing based on the statistics of tempogram. In Proceedings of the 2015 23th Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain, 16–19 June 2015. [Google Scholar]
- Ellis, D.P.W. Beat tracking by dynamic programming. J. New Music Res. 2007, 36, 51–60. [Google Scholar] [CrossRef]
- Peeters, G. Time variable tempo detection and beat marking. In Proceedings of the 2015 International Computer Music Conference, Tucson, AZ, USA, 28 June–2 July 2015. [Google Scholar]
- Durand, S.; Bello, J.P.; David, B.; Richard, G.L.; Fillon, T.; Joder, C.; Durand, S.; Essid, S. Downbeat tracking with multiple features and deep neural networks a conditional random field system for beat tracking. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brisbane, QLD, Australia, 19–24 April 2015. [Google Scholar]
- Fillon, T.; Joder, C.; Durand, S.; Essid, S. A conditional random field system for beat tracking. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brisbane, QLD, Australia, 19–24 April 2015; pp. 424–428. [Google Scholar]
- Bello, J.P.; Daudet, L.; Abdallah, S.; Duxbury, C.; Davies, M.; Sandler, M.B. A tutorial on onset detection in music signals. IEEE Trans. Speech Audio Process. 2005, 13, 1035–1047. [Google Scholar] [CrossRef]
- Holzapfel, A.; Stylianou, Y.; Gedik, A.C.; Bozkurt, B. Three dimensions of pitched instrument onset detection. IEEE Trans. Audio Speech Lang. Process. 2010, 18, 1517–1527. [Google Scholar] [CrossRef]
- Shao, X.; Gui, W.; Xu, C. Note onset detection based on sparse decomposition. Multimed. Tools Appl. 2016, 75, 2613–2631. [Google Scholar] [CrossRef]
- Tan, H.L.; Zhu, Y.; Chaisorn, L.; Rahardja, S. Audio onset detection using energy-based and pitch-based processing. In Proceedings of the 2010 IEEE International Symposium on Circuits and Systems (ISCAS), Paris, France, 30 May–2 June 2010. [Google Scholar]
- Abdallah, S.A.; Plumbley, M.D. Probability as metadata: Event detection in music using ICA as a conditional density model. In Proceedings of the 4th International Symposium on Independent Component Analysis and Blind Signal Separation (ICA2003), Nara, Japan, 1–4 April 2003. [Google Scholar]
- Schlüter, J.; Böck, S. Musical onset detection with convolutional neural networks. In Proceedings of the 6th International Workshop on Machine Learning and Music, Prague, Czech Republic, 23 September 2013. [Google Scholar]
- Stasiak, B.; Mońko, J.; Niewiadomski, A. Note onset detection in musical signals via neural–network–based multi–odf fusion. Int. J. Appl. Math. Comput. Sci. 2016, 26, 203–213. [Google Scholar] [CrossRef]
- Cemgil, A.T.; Kappen, B.; Desain, P.; Honing, H. On tempo tracking: Tempogram representation and kalman filtering. J. New Music Res. 2000, 29, 259–273. [Google Scholar] [CrossRef] [Green Version]
- Scheirer, E.D. Tempo and beat analysis of acoustic musical signals. J. Acoust. Soc. Am. 1998, 103, 588–601. [Google Scholar] [CrossRef] [PubMed]
- Klapuri, A.P.; Eronen, A.J.; Astola, J.T. Analysis of the meter of acoustic musical signals. IEEE Trans. Audio Speech Lang. Process. 2006, 14, 342–355. [Google Scholar] [CrossRef]
- Tzanetakis, G.; Cook, P. Musical genre classification of audio signals. IEEE Trans. Speech Audio Process. 2002, 10, 293–302. [Google Scholar] [CrossRef]
- Tzanetakis, G. Tempo extraction using beat histograms. In Proceedings of the 1st Music Information Retrieval Evaluation eXchange (MIREX 2005), London, UK, 11–15 September 2005. [Google Scholar]
- Eck, D. Identifying metrical and temporal structure with an autocorrelation phase matrix. Music Percept. Interdiscip. J. 2006, 24, 167–176. [Google Scholar] [CrossRef]
- Foote, J.; Uchihashi, S. The beat spectrum: A new approach to rhythm analysis. In Proceedings of the 2001 IEEE International Conference on Multimedia and Expo (ICME 2001), Tokyo, Japan, 22–25 August 2001. [Google Scholar]
- Rudrich, D.; Sontacchi, A. Beat-aligning guitar looper. In Proceedings of the 20th International Conference on Digital Audio Effects (DAFx-17), Edinburgh, UK, 5–9 September 2017; pp. 451–458. [Google Scholar]
- Laroche, J. Efficient tempo and beat tracking in audio recordings. J. Audio Eng. Soc. 2003, 51, 226–233. [Google Scholar]
- Oliveira, J.L.; Davies, M.E.P.; Gouyon, F.; Reis, L.P. Beat tracking for multiple applications: A multi-agent system architecture with state recovery. IEEE Trans. Audio Speech Lang. Process. 2012, 20, 2696–2706. [Google Scholar] [CrossRef]
- Peeters, G.; Papadopoulos, H. Simultaneous beat and downbeat-tracking using a probabilistic framework: Theory and large-scale evaluation. IEEE Trans. Audio Speech Lang. Process. 2011, 19, 1754–1769. [Google Scholar] [CrossRef]
- Eronen, A.J.; Klapuri, A.P. Music tempo estimation with k-NN regression. IEEE Trans. Audio Speech Lang. Process. 2010, 18, 50–57. [Google Scholar] [CrossRef]
- Grosche, P.; Müller, M. Tempogram toolbox: Matlab implementations for tempo and pulse analysis of music recordings. In Proceedings of the 12th International Conference on Music Information Retrieval (ISMIR), Miami, FL, USA, 24–28 October 2011. [Google Scholar]
- MIREX. Mirex Tempo Estimation. Available online: http://www.music-ir.org/mirex/wiki/2016:Audio_Tempo_Estimation (accessed on 9 July 2017).
- Gui, W.; Shao, X.; Ren, C.; Bai, G. Note onset detection based on Gaussian kernel smoothing. J. Inf. Comput. Sci. 2011, 8, 3401–3409. [Google Scholar]
- Davies, M.E.; Plumbley, M.D. Context-dependent beat tracking of musical audio. IEEE Trans. Audio Speech Lang. Process. 2007, 15, 1009–1020. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | ACF | FT | MP |
|---|---|---|---|
| mean | 0.55 | −0.002 | 0.80 |
| variance | 0.11 | 0.54 | 0.08 |
| Algorithm | ACF | FT | MP |
|---|---|---|---|
| The number of the none-zero coefficient | 27,894 | 40,746 | 1914 |
| The percent of the none-zero coefficient | 33.23% | 48.54% | 2.28% |
| Algorithm | Hop Size = 2 | Hop Size = 5 | Hop Size = 20 |
|---|---|---|---|
| The number of the none-zero coefficient | 2003 | 2245 | 2409 |
| The percent of the none-zero coefficient | 2.39% | 2.67% | 2.87% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gui, W.; Sun, Y.; Tao, Y.; Li, Y.; Meng, L.; Zhang, J. A Novel Tempogram Generating Algorithm Based on Matching Pursuit. Appl. Sci. 2018, 8, 561. https://doi.org/10.3390/app8040561
Gui W, Sun Y, Tao Y, Li Y, Meng L, Zhang J. A Novel Tempogram Generating Algorithm Based on Matching Pursuit. Applied Sciences. 2018; 8(4):561. https://doi.org/10.3390/app8040561
Chicago/Turabian StyleGui, Wenming, Yao Sun, Yuting Tao, Yanping Li, Lun Meng, and Jinglan Zhang. 2018. "A Novel Tempogram Generating Algorithm Based on Matching Pursuit" Applied Sciences 8, no. 4: 561. https://doi.org/10.3390/app8040561
APA StyleGui, W., Sun, Y., Tao, Y., Li, Y., Meng, L., & Zhang, J. (2018). A Novel Tempogram Generating Algorithm Based on Matching Pursuit. Applied Sciences, 8(4), 561. https://doi.org/10.3390/app8040561