Multiwavelength Absolute Phase Retrieval from Noisy Diffractive Patterns: Wavelength Multiplexing Algorithm




Abstract
:1. Introduction
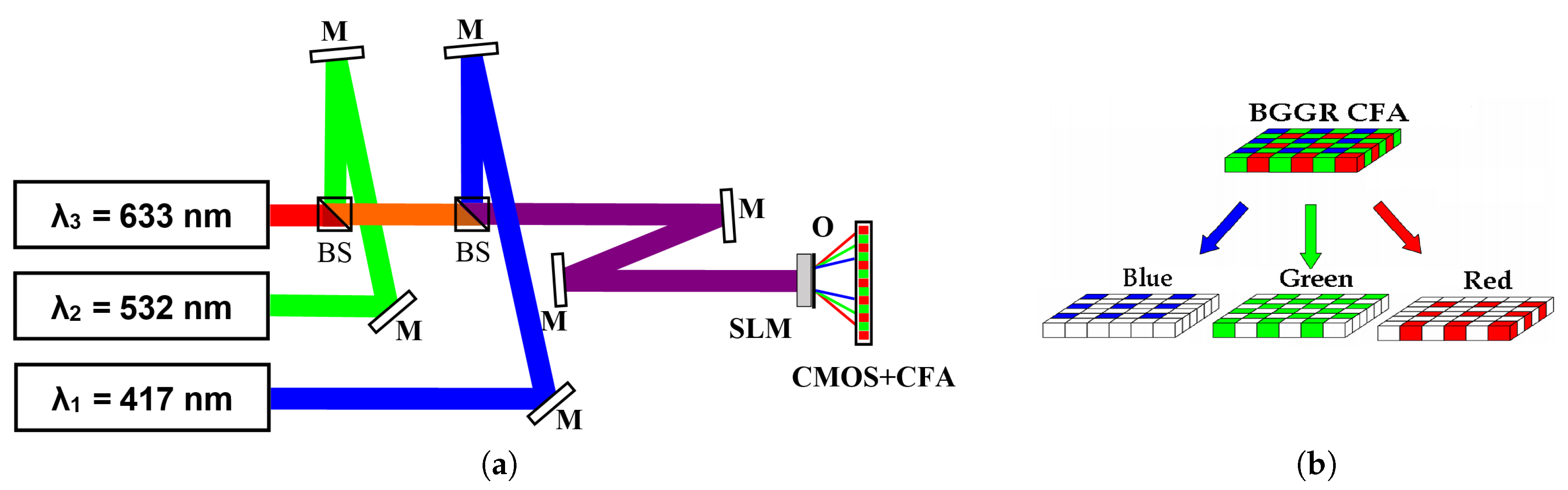
2. Optical Setup and Image Formation Model
2.1. Multiwavelength Object and Image Modeling
2.2. Noisy Observations
3. Algorithm Development
- Minimization of with respect to leads to the solutionHere the ratio means that the variables and have identical phases.The amplitudes are calculated asfor Poissonian noise and as the non-negative solution of the cubic Cardan equationfor the Gaussian noise [32].The input-ouput model of this filtering we denote as , , where the operator is defined by the Equations (15)–(18). Let us clarify meaning of the operations in Equation (15). Say , then for all sensor pixels with the red filter, , the amplitudes are updated using the corresponding R measurements, the first line in Equation (15). For all other pixels , i.e., the amplitude of the is not changed, the second line in Equation (15). In similar way, it works for all colors.This preserving the signal value if the sensor is not able to provide the relevant observation is proposed and used in [32] for subsampled or undersampled observations.This rule can be interpreted as a complex domain interpolation of the wavefront at the sensor plane as well as a demosaicing algorithm for diffraction pattern observations. It is important to note that this observation processing is derived as an optimal solution for noisy data.
- Minimization of with respect to . The last two summands in can be rewritten asThen, we obtain as an optimal estimate forIf are orthonormal such that is the identity operator, , the solution takes the form
- Minimization of on , and (the last summand in the criterion Equation (14)) is the non-linear least square fitting of by the parameters , and . We simplify this problem assuming that . Then, the criterion for this non-linear least square fitting takes the form:where , i.e., the wrapped phase of .In this representation, the phase shifts are addressed to the wrapped phases in order to stress that the complex exponent can be not in-phase with and the variables serve in order to compensation this phase difference and make the phase modeling of the object by corresponding to the complex exponent .The assumption is supported in our algorithm implementation by the initialization procedure enabling the high accuracy estimation of the amplitudes in processing of separate wavelength observations.The Absolute Phase Reconstruction (APR) algorithm is developed for minimization of on and . The derivation and details of this algorithm are presented in Appendix.
Algorithm’s Implementation
Sparsity and Block-Matching 3 Dimensions Filtering
4. Numerical Experiments
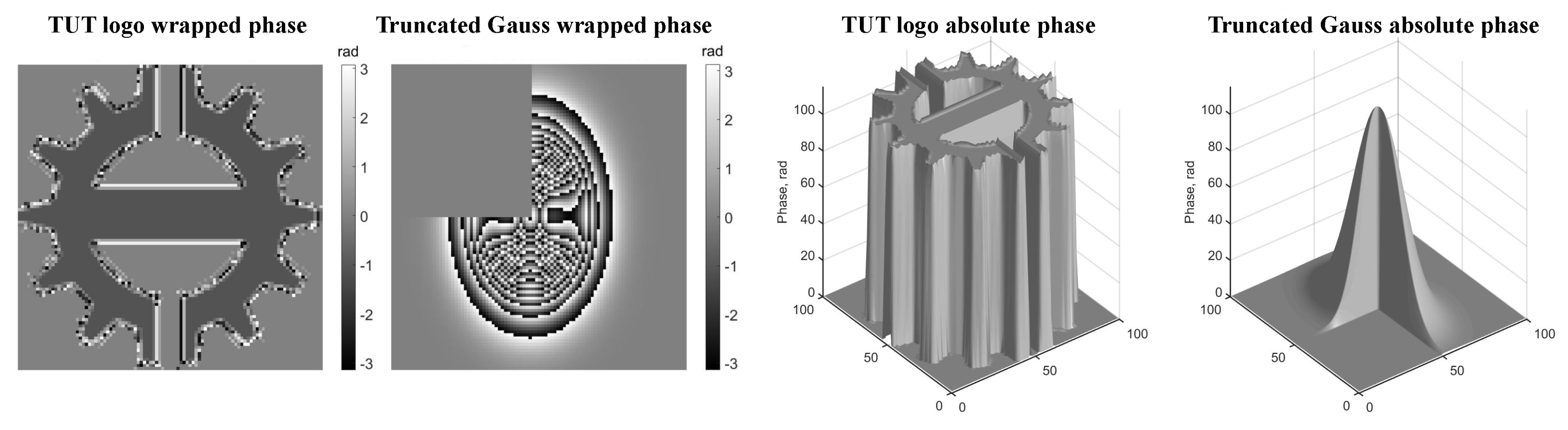
4.1. Setup of Experiments
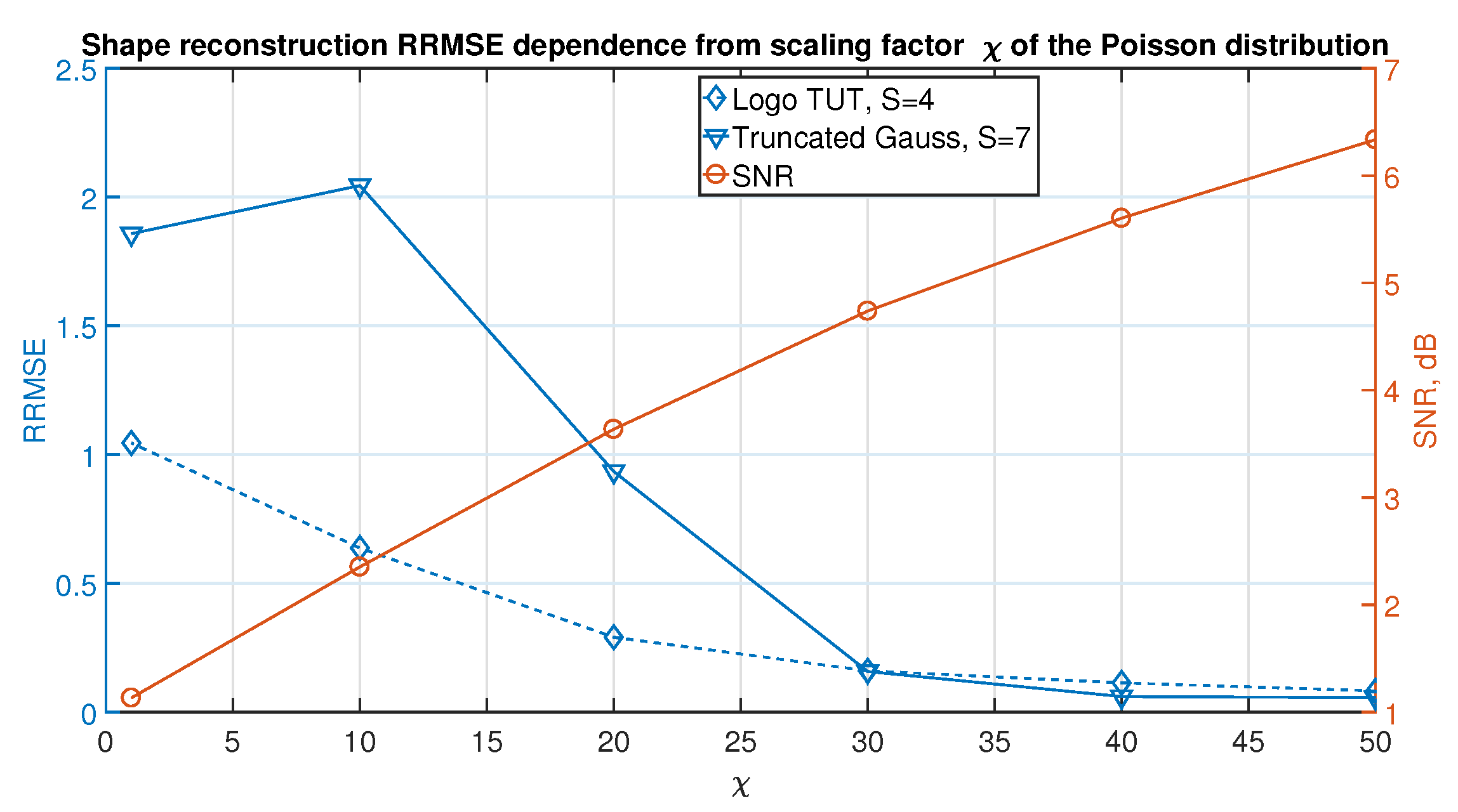
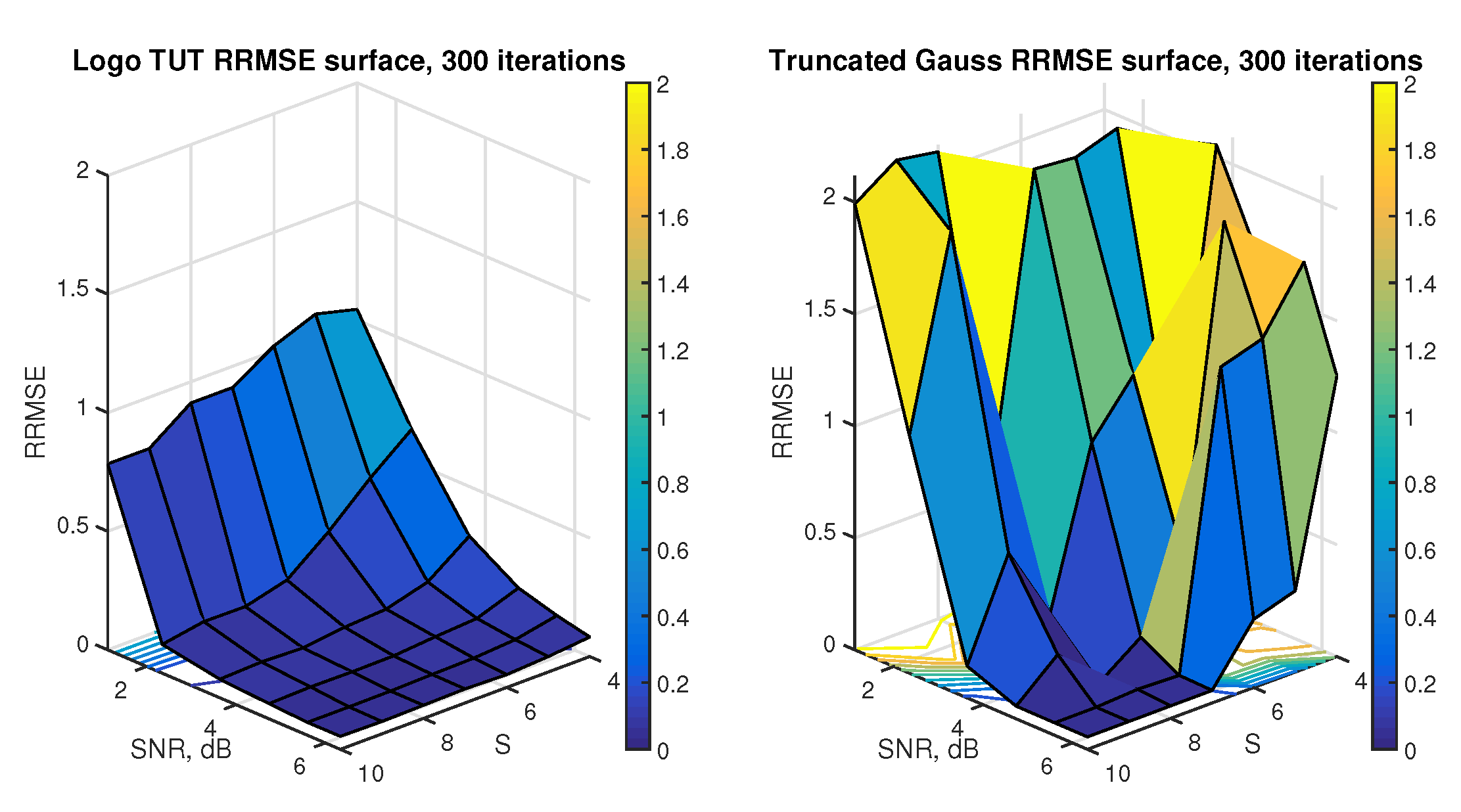
4.2. Reconstruction Results
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| CFA | Color Filter Array |
| CMOS | Complementary Metal Oxide Semiconductor |
| SPAR | Sparse Phase and Amplitude Reconstruction |
| Signal-to-Noise Ratio | |
| APR | Absolute Phase Reconstruction |
| BM3D | Block-Matching 3 Dimensions |
| SLM | Spatial Light Modulator |
| AS | Angular Spectrum |
| TUT | Tampere University of Technology |
| Relative Root Mean Square Error | |
| WM-APR | Wavelength Multiplex Absolute Phase Retrieval |
| GFLOPS | FLoating-point Operations Per Second |
| HOSVD | High-Order Singular Value Decompositions |
Appendix A. Absolute Phase Reconstruction (APR) Algorithm
- Phase synchronization. Let be a reference channel. Define the estimates for in (Equation 21) as followswhere are shifts between the phases of the reference and other channels:and is a hypothetical valued of unknown . One of the goals of this calculations is to reduce a number of unknown phase shifts to a single parameter , i.e., the phase-shift in the reference channel. Note that in the above formulas are known (measured) in the algorithm iterations. Thus, indeed, all are expressed through . The wrapping operator in Equations (A1)–(A2) is used for proper calculation of the wrapped phase and the median averaging in order to get the robust estimate of the invariant .Inserting in Equation (21) we obtain this criterion in the formwhere is given.The meaning of , can be revealed if we assume that all phase-shift estimates are accurate than we can see thatIt follows, thatIf we know that than the perfect phase equalization is produced and .In general case, when , the in-phase situation is not achieved.Going back to the criterion (Equation (A3)) we note that with this compensation it takes the formand using (Equation (A4)) it can be rewritten asThus, the accurate compensation of the phase shifts in the wrapped phases is achieved while the absolute phase can be estimated within an unknown but invariant phase shift . This is not essential error as in the phase retrieval setup, can be estimated only within an invariant shift.
- Minimization of Equation (A8) on gives the estimate of the absolute phase provided given .It has no an analytical solution and is obtained by numerical calculations.The calculations in Equation (A8) are produced pixel-wise for each pixel x independently.Note that as well as the solution both depend on the unknown invariant .
- Finalization of estimation. When is found the optimal values for are calculated asIn our algorithm implementation, the solutions for Equations (A6) and (A9) are obtained by the grid optimization.It has been noted in our experiments that an essential improvement in the accuracy of the absolute phase reconstruction is achieved due to optimization on .
References
- Picart, P.; Li, J. Digital Holography; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Schnars, U.; Falldorf, C.; Watson, J.; Jüptner, W. Digital Holography and Wavefront Sensing; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Belashov, A.; Petrov, N.; Semenova, I. Digital off-axis holographic interferometry with simulated wavefront. Opt. Express 2014, 22, 28363–28376. [Google Scholar] [CrossRef] [PubMed]
- Belashov, A.V.; Petrov, N.V.; Semenova, I.V. Accuracy of image-plane holographic tomography with filtered backprojection: random and systematic errors. Appl. Opt. 2016, 55, 81–88. [Google Scholar] [CrossRef] [PubMed]
- Kostencka, J.; Kozacki, T. Space-domain, filtered backpropagation algorithm for tomographic configuration with scanning of illumination. Int. Soc. Opt. Photonics 2016, 9890, 98900F. [Google Scholar]
- Wu, C.H.; Lai, X.J.; Cheng, C.J.; Yu, Y.C.; Chang, C.Y. Applications of digital holographic microscopy in therapeutic evaluation of Chinese herbal medicines. Appl. Opt. 2014, 53, G192–G197. [Google Scholar] [CrossRef] [PubMed]
- Belashov, A.V.; Zhikhoreva, A.A.; Belyaeva, T.N.; Kornilova, E.S.; Petrov, N.V.; Salova, A.V.; Semenova, I.V.; Vasyutinskii, O.S. Digital holographic microscopy in label-free analysis of cultured cells’ response to photodynamic treatment. Opt. Lett. 2016, 41, 5035. [Google Scholar] [CrossRef] [PubMed]
- Cheremkhin, P.A.; Evtikhiev, N.N.; Krasnov, V.V.; Kulakov, M.N.; Kurbatova, E.A.; Molodtsov, D.Y.; Rodin, V.G. Demonstration of digital hologram recording and 3D-scenes reconstruction in real-time. Int. Soc. Opt. Photonics 2016, 9889, 98891M. [Google Scholar]
- Coppola, G.; Ferraro, P.; Iodice, M.; Nicola, S.D.; Finizio, A.; Grilli, S. A digital holographic microscope for complete characterization of microelectromechanical systems. Meas. Sci. Technol. 2004, 15, 529–539. [Google Scholar] [CrossRef]
- Gerchberg, R.W.; Saxton, W.O. A Practical Algorithm for the Determination of Phase from Image and Diffraction Plane Pictures. Optik 1969, 35, 237–246. [Google Scholar]
- Fienup, J.R. Phase retrieval algorithms: a comparison. Appl. Opt. 1982, 21, 2758. [Google Scholar] [CrossRef] [PubMed]
- Almoro, P.F.; Pedrini, G.; Gundu, P.N.; Osten, W.; Hanson, S.G. Enhanced wavefront reconstruction by random phase modulation with a phase diffuser. Opt. Lasers Eng. 2011, 49, 252–257. [Google Scholar] [CrossRef]
- Candès, E.J.; Li, X.; Soltanollotabi, M. Phase Retrieval from Coded Difraction Patterns. arXiv 2013, arXiv:1310.32402013, 1–24. [Google Scholar]
- Almoro, P.F.; Pham, Q.D.; Serrano-Garcia, D.I.; Hasegawa, S.; Hayasaki, Y.; Takeda, M.; Yatagai, T. Enhanced intensity variation for multiple-plane phase retrieval using a spatial light modulator as a convenient tunable diffuser. Opt. Lett. 2016, 41, 2161. [Google Scholar] [CrossRef] [PubMed]
- Camacho, L.; Micó, V.; Zalevsky, Z.; García, J. Quantitative phase microscopy using defocusing by means of a spatial light modulator. Opt. Express 2010, 18, 6755–6766. [Google Scholar] [CrossRef] [PubMed]
- Kress, B.C.; Meyrueis, P. Applied Digital Optics—From Micro Optics to Nanophotonics; John Wiley & Sons: Hoboken, NJ, USA, 2009; p. 617. [Google Scholar]
- Guo, C.; Liu, S.; Sheridan, J.T. Iterative phase retrieval algorithms I: Optimization. Appl. Opt. 2015, 54, 4698. [Google Scholar] [CrossRef] [PubMed]
- Fienup, J.R. Phase-retrieval algorithms for a complicated optical system. Appl. Opt. 1993, 32, 1737. [Google Scholar] [CrossRef] [PubMed]
- Bauschke, H.H.; Combettes, P.L.; Luke, D.R. Phase retrieval, error reduction algorithm, and Fienup variants: a view from convex optimization. J. Opt. Soc. Am. A 2002, 19, 1334. [Google Scholar] [CrossRef]
- Pauwels, E.; Beck, A.; Eldar, Y.C.; Sabach, S. On Fienup Methods for Regularized Phase Retrieval. arXiv, 2017; arXiv:1702.08339. [Google Scholar]
- Shechtman, Y.; Eldar, Y.C.; Cohen, O.; Chapman, H.N.; Miao, J.; Segev, M. Phase Retrieval with Application to Optical Imaging: A contemporary overview. IEEE Signal Process. Mag. 2015, 32, 87–109. [Google Scholar] [CrossRef]
- Yurtsever, A.; Udell, M.; Tropp, J.A.; Cevher, V. Sketchy Decisions: Convex Low-Rank Matrix Optimization with Optimal Storage. arXiv, 2017; arXiv:1702.06838. [Google Scholar]
- Candès, E.J.; Li, X.; Soltanolkotabi, M. Phase Retrieval via Wirtinger Flow: Theory and Algorithms. IEEE Trans. Inf. Theory 2015, 61, 1985–2007. [Google Scholar] [CrossRef]
- Chen, Y.; Candès, E.J. Solving Random Quadratic Systems of Equations Is Nearly as Easy as Solving Linear Systems. Commun. Pure Appl. Math. 2017, 70, 822–883. [Google Scholar] [CrossRef]
- Weller, D.S.; Pnueli, A.; Divon, G.; Radzyner, O.; Eldar, Y.C.; Fessler, J.A. Undersampled Phase Retrieval With Outliers. IEEE Trans. Comput. Imaging 2015, 1, 247–258. [Google Scholar] [CrossRef] [PubMed]
- Soulez, F.; Thiébaut, É.; Schutz, A.; Ferrari, A.; Courbin, F.; Unser, M. Proximity operators for phase retrieval. Appl. Opt. 2016, 55, 7412. [Google Scholar] [CrossRef] [PubMed]
- Shechtman, Y.; Beck, A.; Eldar, Y.C. GESPAR: Efficient phase retrieval of sparse signals. IEEE Trans. Signal Process. 2014, 62, 928–938. [Google Scholar] [CrossRef]
- Tillmann, A.M.; Eldar, Y.C.; Mairal, J. DOLPHIn—Dictionary Learning for Phase Retrieval. IEEE Trans. Signal Process. 2016, 64, 6485–6500. [Google Scholar] [CrossRef] [Green Version]
- Katkovnik, V.; Astola, J. High-accuracy wave field reconstruction: Decoupled inverse imaging with sparse modeling of phase and amplitude. J. Opt. Soc. Am. A 2012, 29, 44–54. [Google Scholar] [CrossRef] [PubMed]
- Katkovnik, V.; Astola, J. Compressive sensing computational ghost imaging. J. Opt. Soc. Am. A 2012, 29, 1556. [Google Scholar] [CrossRef] [PubMed]
- Katkovnik, V.; Astola, J. Sparse ptychographical coherent diffractive imaging from noisy measurements. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2013, 30, 367–379. [Google Scholar] [CrossRef] [PubMed]
- Katkovnik, V. Phase retrieval from noisy data based on sparse approximation of object phase and amplitude. arXiv, 2017; arXiv:1709.01071. [Google Scholar]
- Katkovnik, V.; Egiazarian, K. Sparse superresolution phase retrieval from phase-coded noisy intensity patterns. Opt. Eng. 2017, 56, 094103. [Google Scholar] [CrossRef]
- Katkovnik, V.; Shevkunov, I.; Petrov, N.; Egiazarian, K. Computational super-resolution phase retrieval from multiple phase-coded diffraction patterns: Simulation study and experiments. Optica 2017, 4, 786–794. [Google Scholar] [CrossRef]
- Towers, C.E.; Towers, D.P.; Jones, J.D.C. Absolute fringe order calculation using optimised multi-frequency selection in full-field profilometry. Opt. Lasers Eng. 2005, 43, 52–64. [Google Scholar] [CrossRef]
- Pedrini, G.; Osten, W.; Zhang, Y. Wave-front reconstruction from a sequence of interferograms recorded at different planes. Opt. Lett. 2005, 30, 833–835. [Google Scholar] [CrossRef] [PubMed]
- Falldorf, C.; Huferath-von Luepke, S.; von Kopylow, C.; Bergmann, R.B. Reduction of speckle noise in multiwavelength contouring. Appl. Opt. 2012, 51, 8211. [Google Scholar] [CrossRef] [PubMed]
- Cheremkhin, P.; Shevkunov, I.; Petrov, N. Multiple-wavelength Color Digital Holography for Monochromatic Image Reconstruction. Phys. Procedia 2015, 73, 301–307. [Google Scholar] [CrossRef]
- Tahara, T.; Otani, R.; Arai, Y.; Takaki, Y. Multiwavelength Digital Holography and Phase-Shifting Interferometry Selectively Extracting Wavelength Information: Phase-Division Multiplexing (PDM) of Wavelengths. Hologr. Mater. Opt. Syst. 2017, 25, 11157–11172. [Google Scholar]
- Claus, D.; Pedrini, G.; Buchta, D.; Osten, W. Spectrally resolved digital holography using a white light LED. Proc. SPIE–Int. Soc. Opt. Eng. 2017, 10335, 103351H. [Google Scholar]
- Bioucas-Dias, J.; Katkovnik, V.; Astola, J.; Egiazarian, K. Multi-frequency Phase Unwrapping from Noisy Data: Adaptive Local Maximum Likelihood Approach RID C-5479-2009. Image Anal. Proc. 2009, 5575, 310–320. [Google Scholar]
- Bioucas-Dias, J.; Valadão, G. Multifrequency absolute phase estimation via graph cuts. In Proceedings of the 2009 17th European Signal Processing Conference, Glasgow, UK, 24–28 August 2009; pp. 1389–1393. [Google Scholar]
- Bao, P.; Zhang, F.; Pedrini, G.; Osten, W. Phase retrieval using multiple illumination wavelengths. Opt. Lett. 2008, 33, 309–311. [Google Scholar] [CrossRef] [PubMed]
- Petrov, N.V.; Bespalov, V.G.; Gorodetsky, A.A. Phase retrieval method for multiple wavelength speckle patterns. Proc. SPIE 2010, 7387, 73871T. [Google Scholar]
- Petrov, N.V.; Volkov, M.V.; Gorodetsky, A.A.; Bespalov, V.G. Image reconstruction using measurements in volume speckle fields formed by different wavelengths. Proc. SPIE 2011, 7907, 790718. [Google Scholar]
- Bao, P.; Situ, G.; Pedrini, G.; Osten, W. Lensless phase microscopy using phase retrieval with multiple illumination wavelengths. Appl. Opt. 2012, 51, 5486–5494. [Google Scholar] [CrossRef] [PubMed]
- Phillips, Z.F.; Chen, M.; Waller, L. Single-shot quantitative phase microscopy with color-multiplexed differential phase contrast (cDPC). PLoS ONE 2017, 12, e0171228. [Google Scholar] [CrossRef] [PubMed]
- Sanz, M.; Picazo-Bueno, J.A.; García, J.; Micó, V. Improved quantitative phase imaging in lensless microscopy by single-shot multi-wavelength illumination using a fast convergence algorithm. Opt. Express 2015, 23, 21352–21365. [Google Scholar] [CrossRef] [PubMed]
- Falaggis, K.; Towers, D.P.; Towers, C.E. Algebraic solution for phase unwrapping problems in multiwavelength interferometry. Appl. Opt. 2014, 53, 3737. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Li, X.; Wang, W.; Xia, X.G. Maximum likelihood estimation based Robust Chinese remainder theorem for real numbers and its fast algorithm. IEEE Trans. Signal Process. 2015, 63, 3317–3331. [Google Scholar] [CrossRef]
- Xiao, L.; Xia, X.G.; Huo, H. Towards Robustness in Residue Number Systems. IEEE Trans. Signal Process. 2016, 65, 1–32. [Google Scholar] [CrossRef]
- Katkovnik, V.; Shevkunov, I.; Petrov, N.V.; Egiazarian, K. Multiwavelength surface contouring from phase-coded diffraction patterns. Presented at SPIE Photonics Europe, Palais de la Musique et des Congrès, Strasbourg, France, 22–26 April 2018. Paper 10677-46. [Google Scholar]
- Kulya, M.S.; Balbekin, N.S.; Gredyuhina, I.V.; Uspenskaya, M.V.; Nechiporenko, A.P.; Petrov, N.V. Computational terahertz imaging with dispersive objects. J. Mod. Opt. 2017, 64, 1283–1288. [Google Scholar] [CrossRef]
- Dabov, K.; Foi, A.; Katkovnik, V. Image denoising by sparse 3D transformation-domain collaborative filtering. IEEE Trans. Image Process. 2007, 16, 2080–2095. [Google Scholar] [CrossRef] [PubMed]
- Lesnichii, V.V.; Petrov, N.V.; Cheremkhin, P.A. A technique of measuring spectral characteristics of detector arrays in amateur and professional photocameras and their application for problems of digital holography. Opt. Spectrosc. 2013, 115, 557–566. [Google Scholar] [CrossRef]
- Raginsky, M.; Willett, R.; Harmany, Z.; Marcia, R. Compressed sensing performance bounds under Poisson noise. Signal Process. IEEE Trans. 2010, 58, 3990–4002. [Google Scholar] [CrossRef]
- Harmany, Z.T.; Marcia, R.F.; Willett, R.M. Sparsity-regularized photon-limited imaging. In Proceedings of the 2010 IEEE International Symposium on Biomedical Imaging: From Nano to Macro, Rotterdam, The Netherlands, 14–17 April 2010; pp. 772–775. [Google Scholar]
- Mallat, S.G. A Theory for Multiresolution Signal Decomposition: The Wavelet Representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Rajwade, A.; Member, S.; Rangarajan, A. Image Denoising Using the Higher Order Singular Value Decomposition. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 849–862. [Google Scholar] [CrossRef] [PubMed]
- Metzler, C.A.; Maleki, A.; Baraniuk, R.G. BM3D-PRGAMP: Compressive phase retrieval based on BM3D denoising. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 2504–2508. [Google Scholar]
- Danielyan, A.; Katkovnik, V.; Egiazarian, K. BM3D Frames and Variational Image Deblurring. IEEE Trans. Image Process. 2012, 21, 1715–1728. [Google Scholar] [CrossRef] [PubMed]
- Katkovnik, V.; Shevkunov, I.A.; Petrov, N.V.; Egiazarian, K. Wavefront reconstruction in digital off-axis holography via sparse coding of amplitude and absolute phase. Opt. Lett. 2015, 40, 2417. [Google Scholar] [CrossRef] [PubMed]
- Katkovnik, V.; Ponomarenko, M.; Egiazarian, K. Sparse approximations in complex domain based on BM3D modeling. Signal Process. 2017, 141, 96–108. [Google Scholar] [CrossRef]
- Cheremkhin, P.A.; Lesnichii, V.V.; Petrov, N.V. Use of spectral characteristics of DSLR cameras with Bayer filter sensors. J. Phys. Conf. Ser. 2014, 536, 012021. [Google Scholar] [CrossRef]
- Goodman, J.W. Introduction to Fourier opt.; Roberts & Co.: Greenwood Village, CO, USA, 2005; p. 491. [Google Scholar]
- Petrov, N.V.; Bespalov, V.G.; Volkov, M.V. Phase retrieval of THz radiation using set of 2D spatial intensity measurements with different wavelengths. Proc. SPIE 2012, 8281, 82810J. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input:, , | |
| Initialization:, | |
| Main iterations: | |
| 1. | Forward propagation and mixing |
| , | |
| ; | |
| 2. | Noise suppression: |
| ; | |
| 3. | Backward propagation and filtering: |
| , | |
| 4. | Absolute phase retrieval and filtering: |
| {; | |
| 5. | Object wavefront update: |
| Output |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Katkovnik, V.; Shevkunov, I.; Petrov, N.V.; Eguiazarian, K. Multiwavelength Absolute Phase Retrieval from Noisy Diffractive Patterns: Wavelength Multiplexing Algorithm. Appl. Sci. 2018, 8, 719. https://doi.org/10.3390/app8050719
Katkovnik V, Shevkunov I, Petrov NV, Eguiazarian K. Multiwavelength Absolute Phase Retrieval from Noisy Diffractive Patterns: Wavelength Multiplexing Algorithm. Applied Sciences. 2018; 8(5):719. https://doi.org/10.3390/app8050719
Chicago/Turabian StyleKatkovnik, Vladimir, Igor Shevkunov, Nikolay V. Petrov, and Karen Eguiazarian. 2018. "Multiwavelength Absolute Phase Retrieval from Noisy Diffractive Patterns: Wavelength Multiplexing Algorithm" Applied Sciences 8, no. 5: 719. https://doi.org/10.3390/app8050719
APA StyleKatkovnik, V., Shevkunov, I., Petrov, N. V., & Eguiazarian, K. (2018). Multiwavelength Absolute Phase Retrieval from Noisy Diffractive Patterns: Wavelength Multiplexing Algorithm. Applied Sciences, 8(5), 719. https://doi.org/10.3390/app8050719