Analysis of Blur Measure Operators for Single Image Blur Segmentation



Abstract
:1. Introduction
2. Related Work
3. Material and Method
3.1. Image Dataset
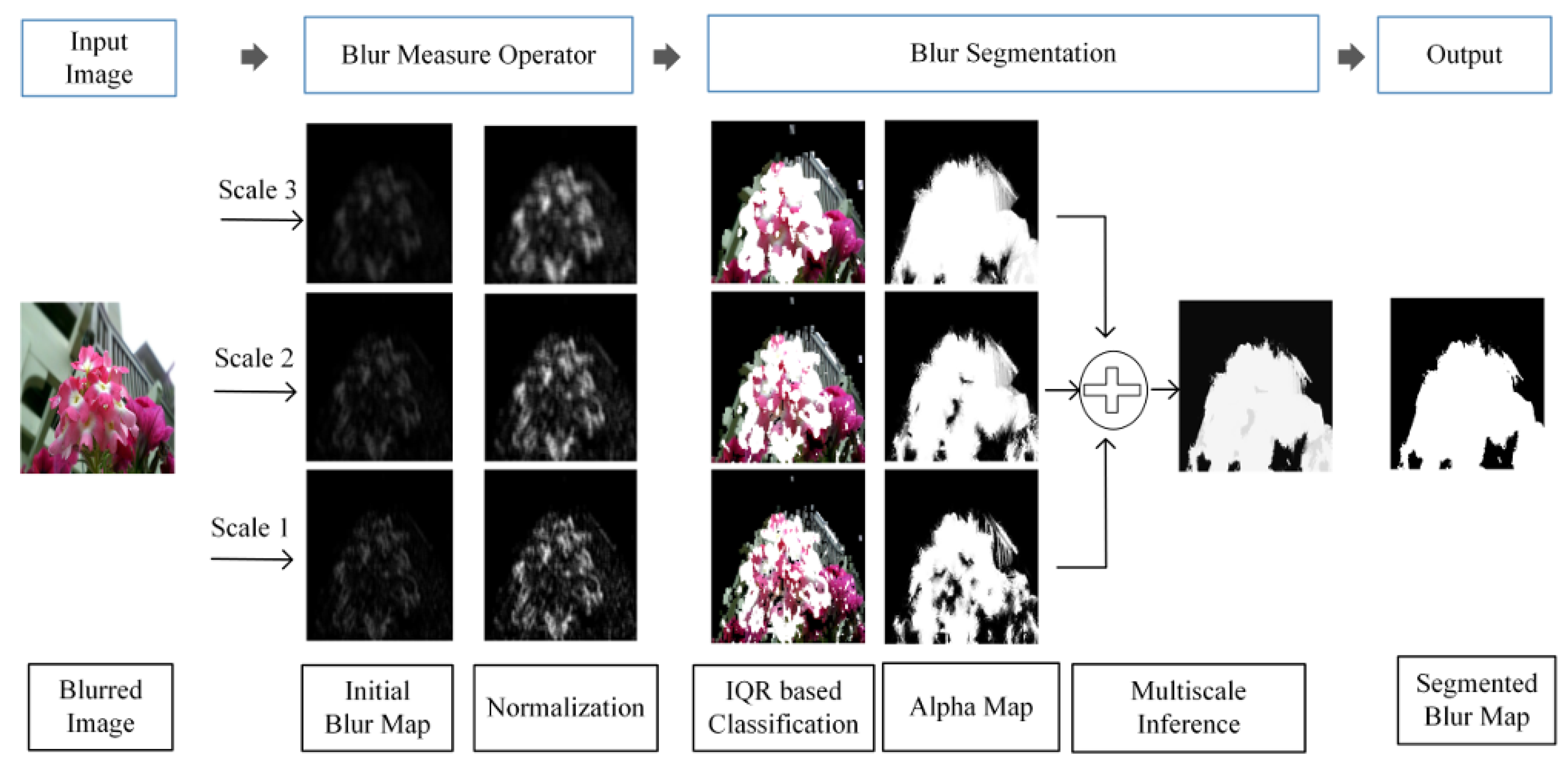
3.2. Methodology
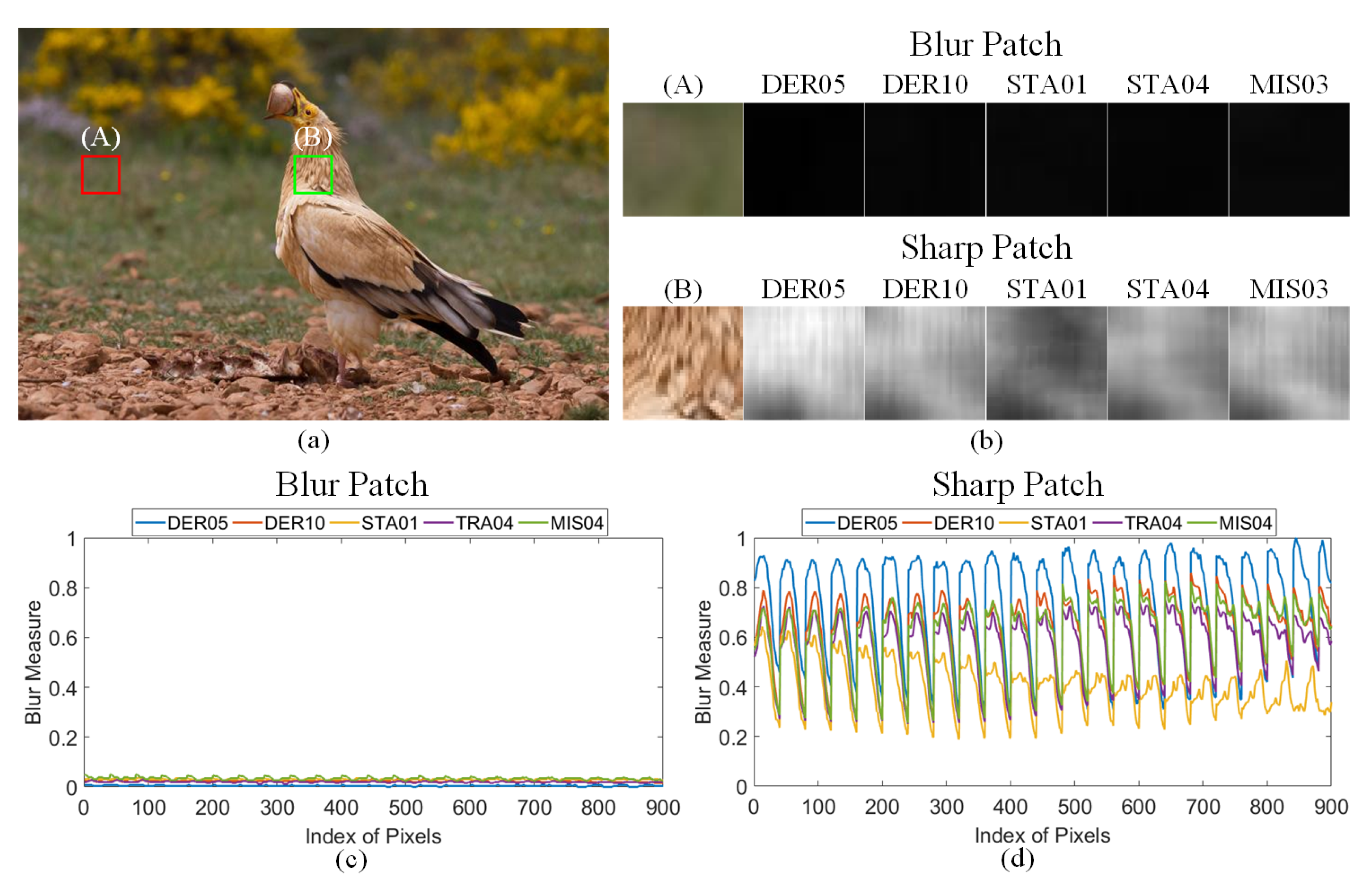
3.2.1. Blur Measures
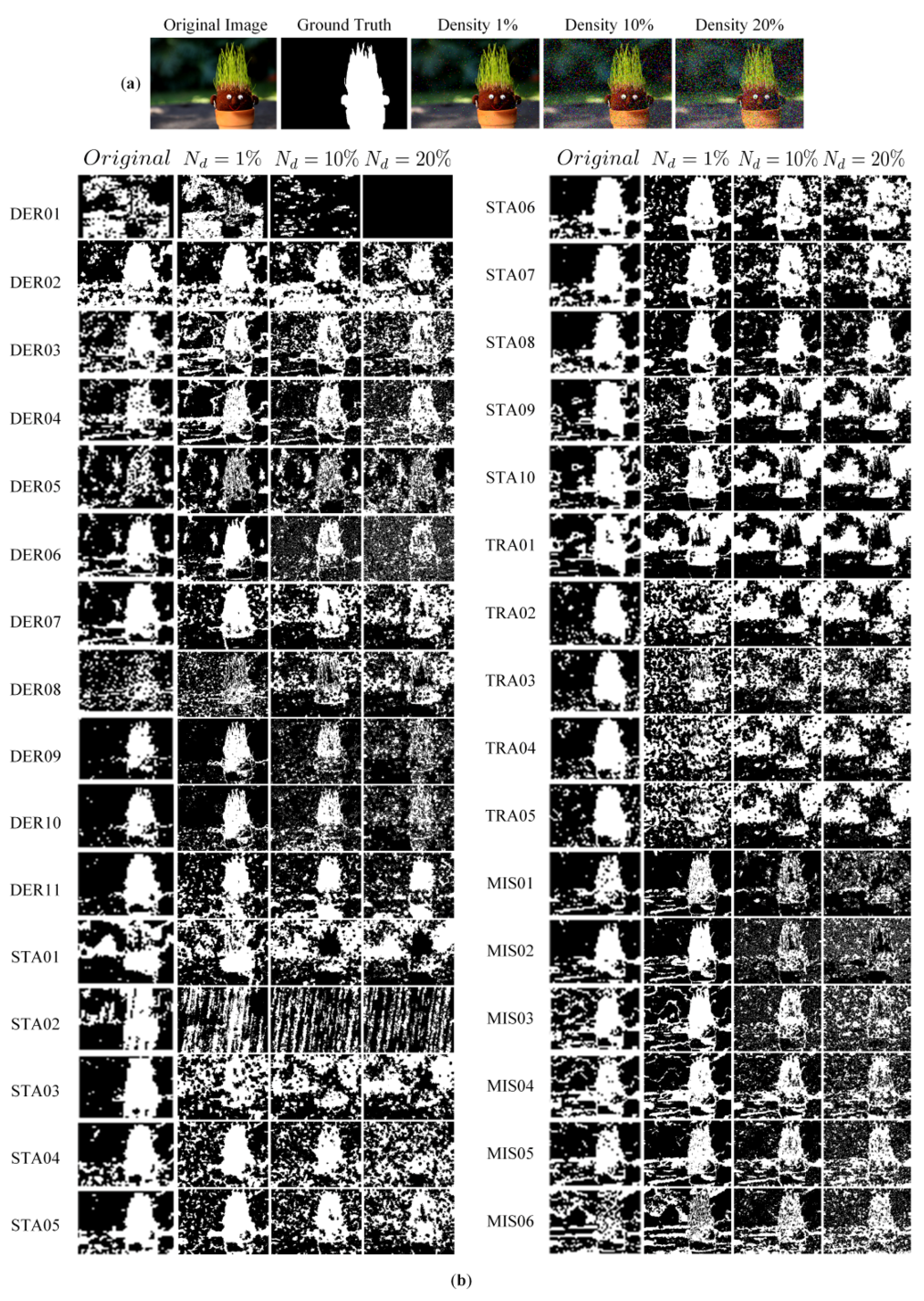
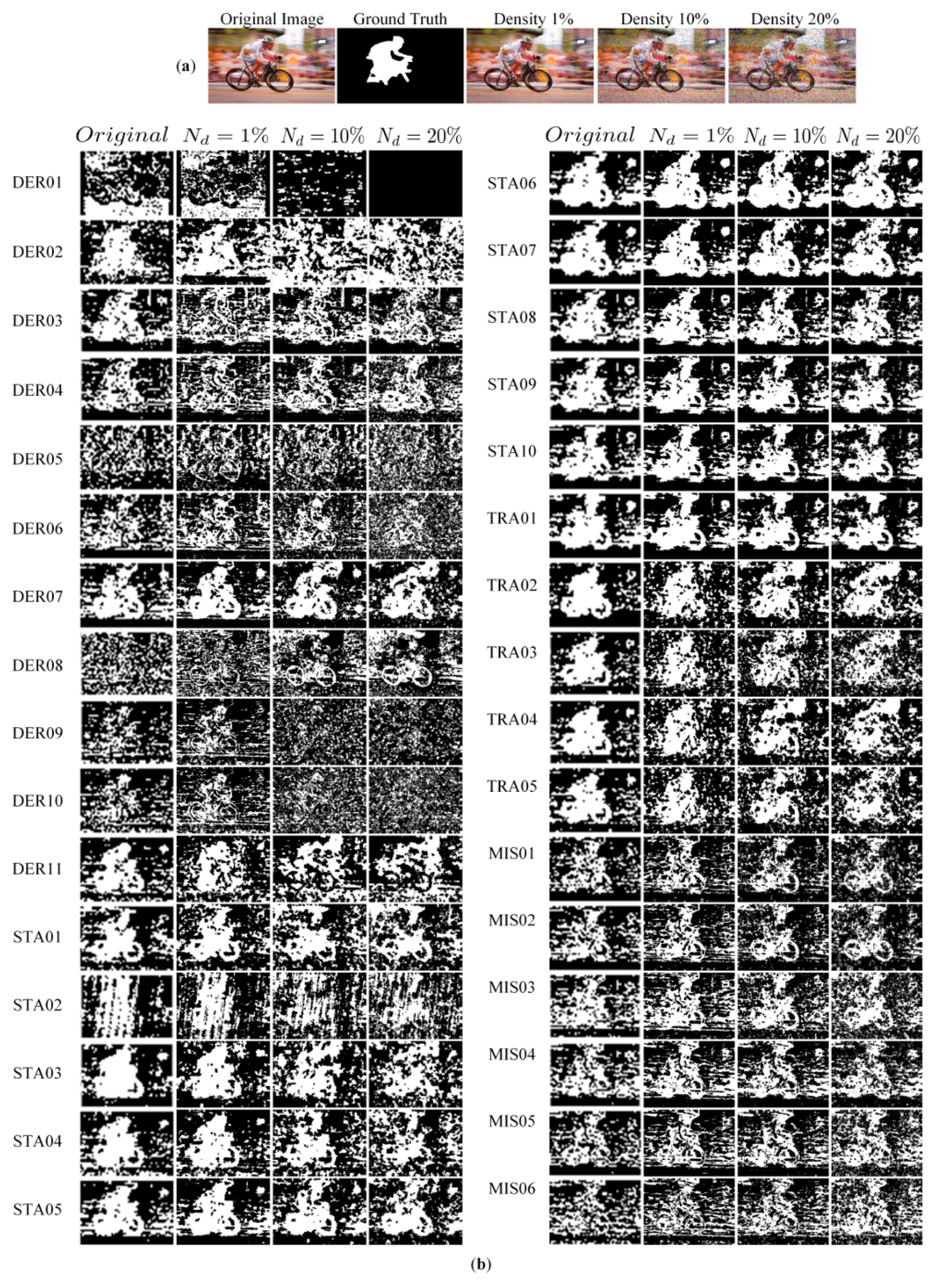
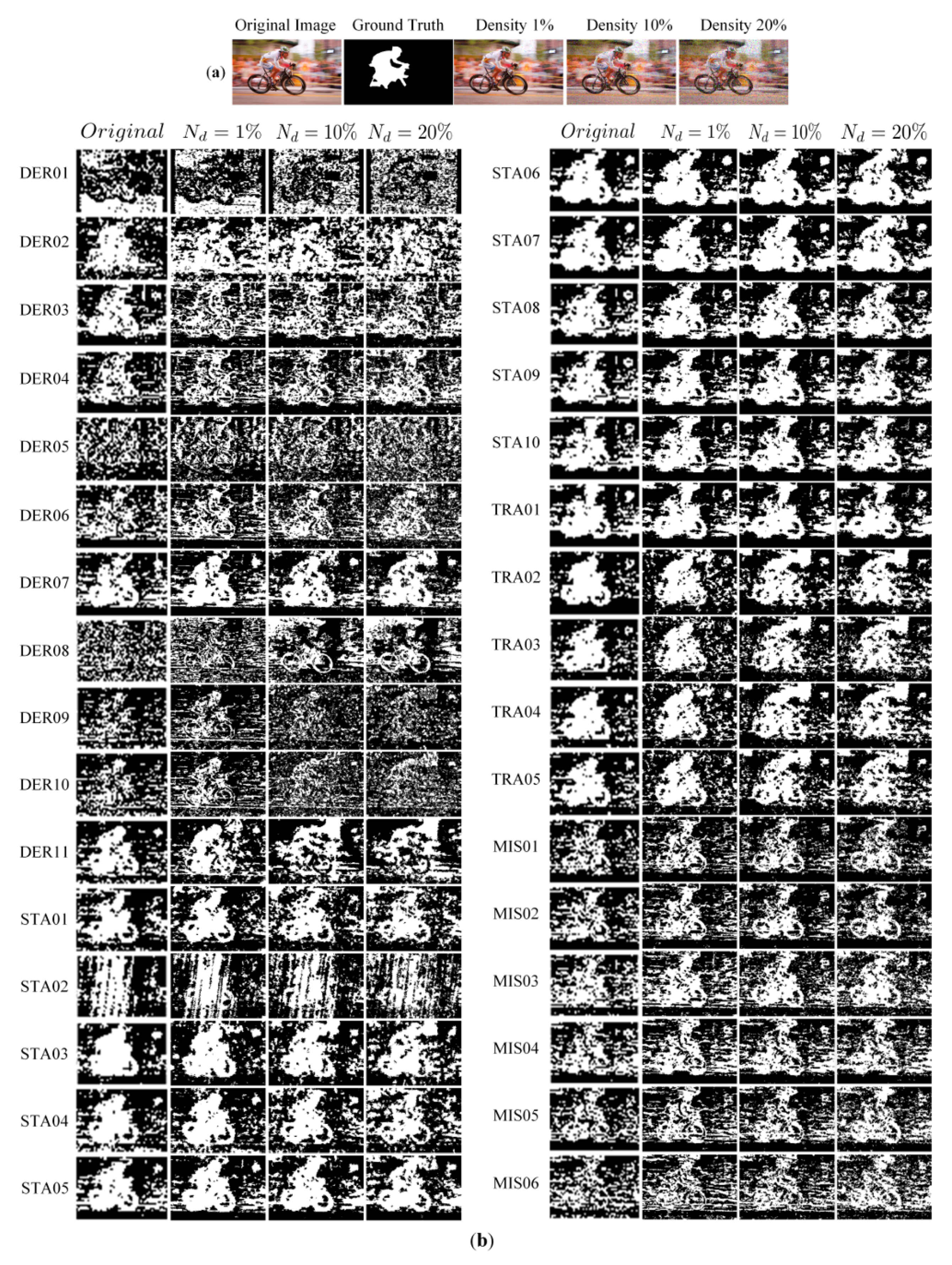
- Derivative-based operators [DER*]: The blur measure operators in this category are based on the derivative of the image. These operators are based on the assumption that non-blurred images present sharp edges as compared to blurred images. First and second order derivatives of the image neighborhood windows provide the base to distinguish between blurred and non-blurred regions of the image.
- Statistical-based operators [STA*]: The blur measure operators of this category utilize several statistical measures which are computed on image neighborhood windows to differentiate between blurred and non-blurred neighborhood windows in the image.
- Transform-based operators [TRA*]: The blur measure operators within this category are based on the transform domain representations of the image content. These frequency domain representations offer to be the true replica of the same information as in the spatial domain and thus this frequency content of the image can be utilized to differentiate between blurred and non-blurred regions of the image.
- Miscellaneous operators [MIS*]: These operators do not belong to any of the previously mentioned categories.
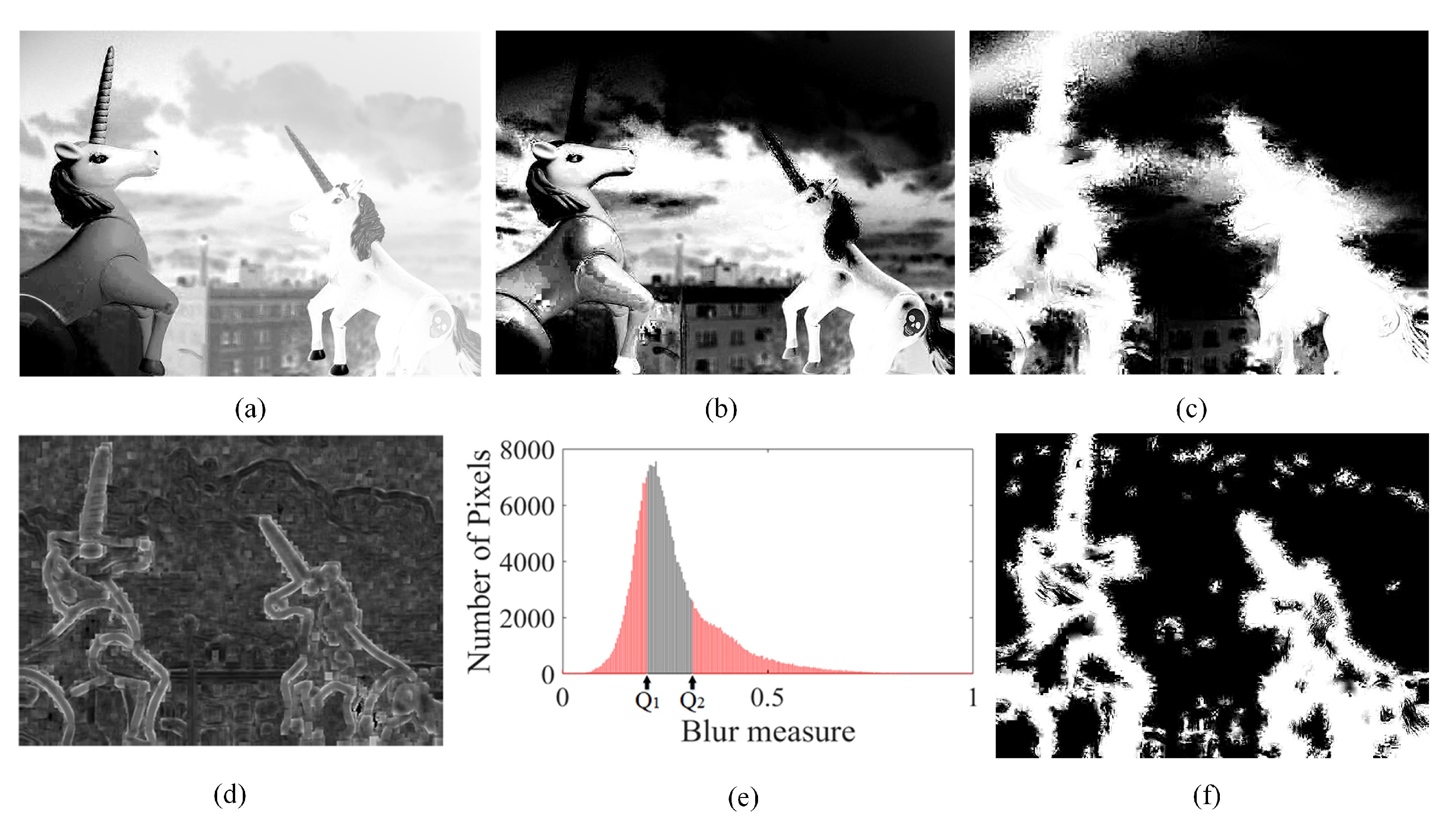
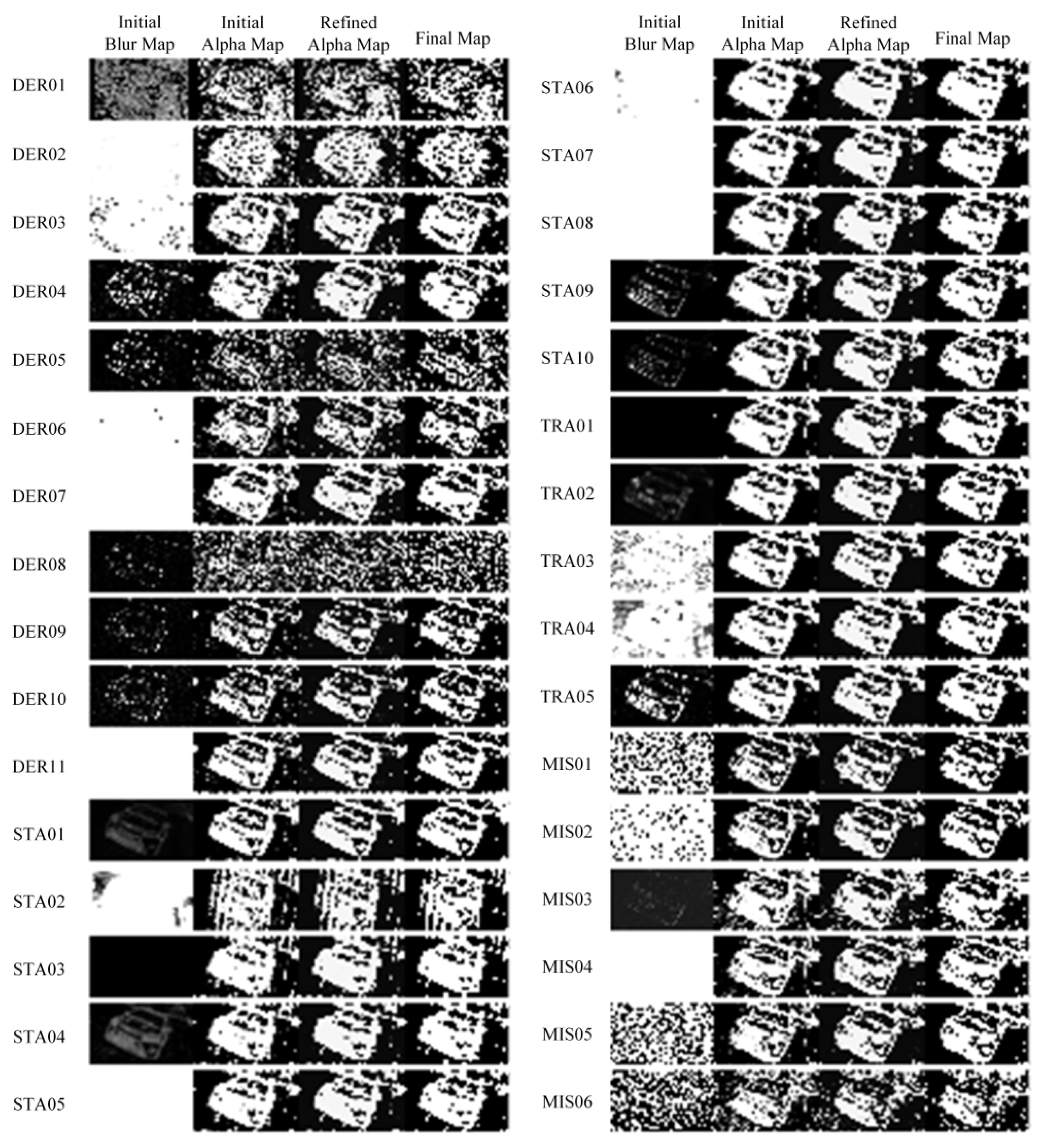
3.2.2. Blur Classification
3.2.3. Multiscale Inference
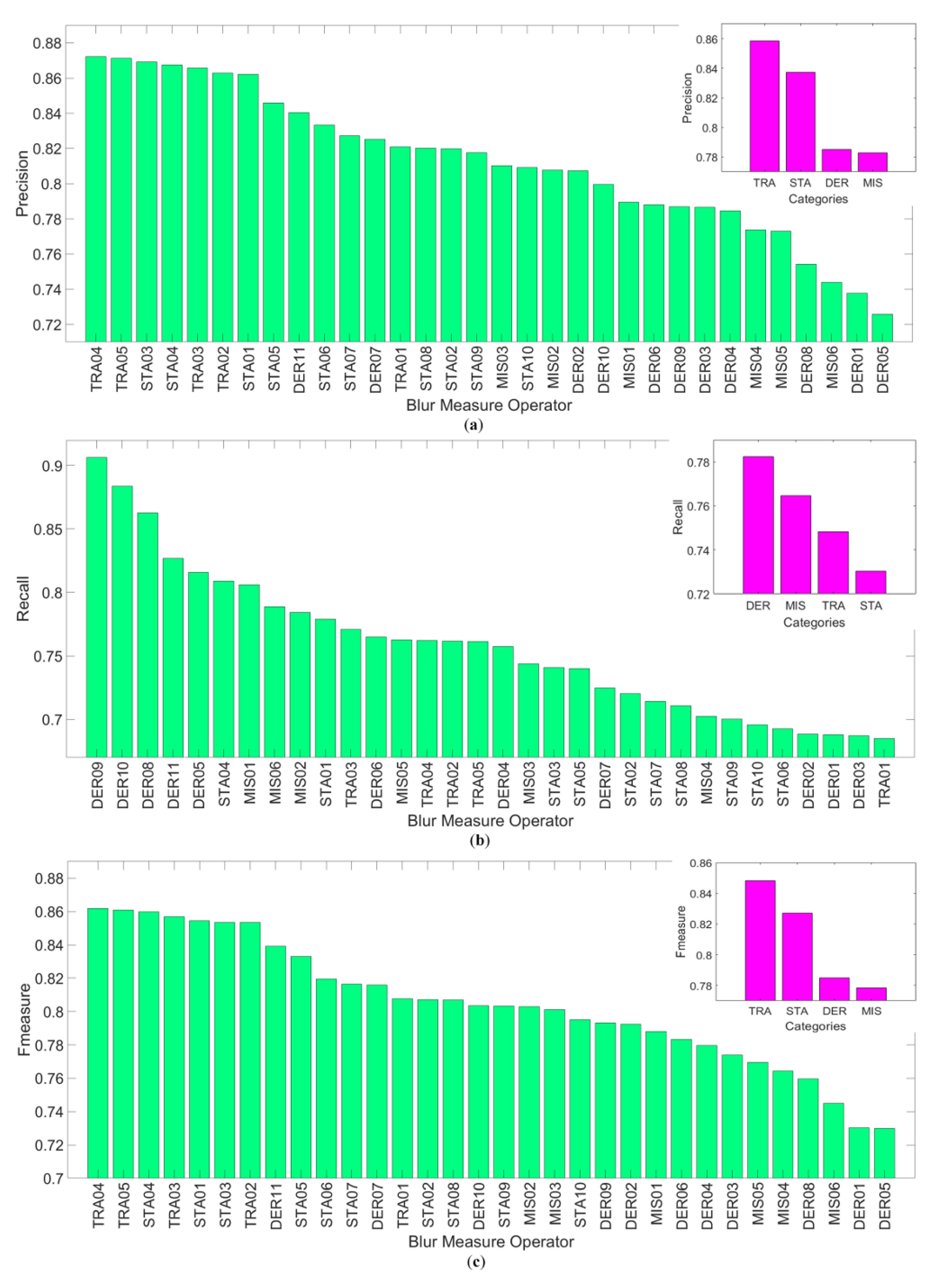
3.3. Evaluation Measures
4. Results and Discussion
4.1. Qualitative Analysis
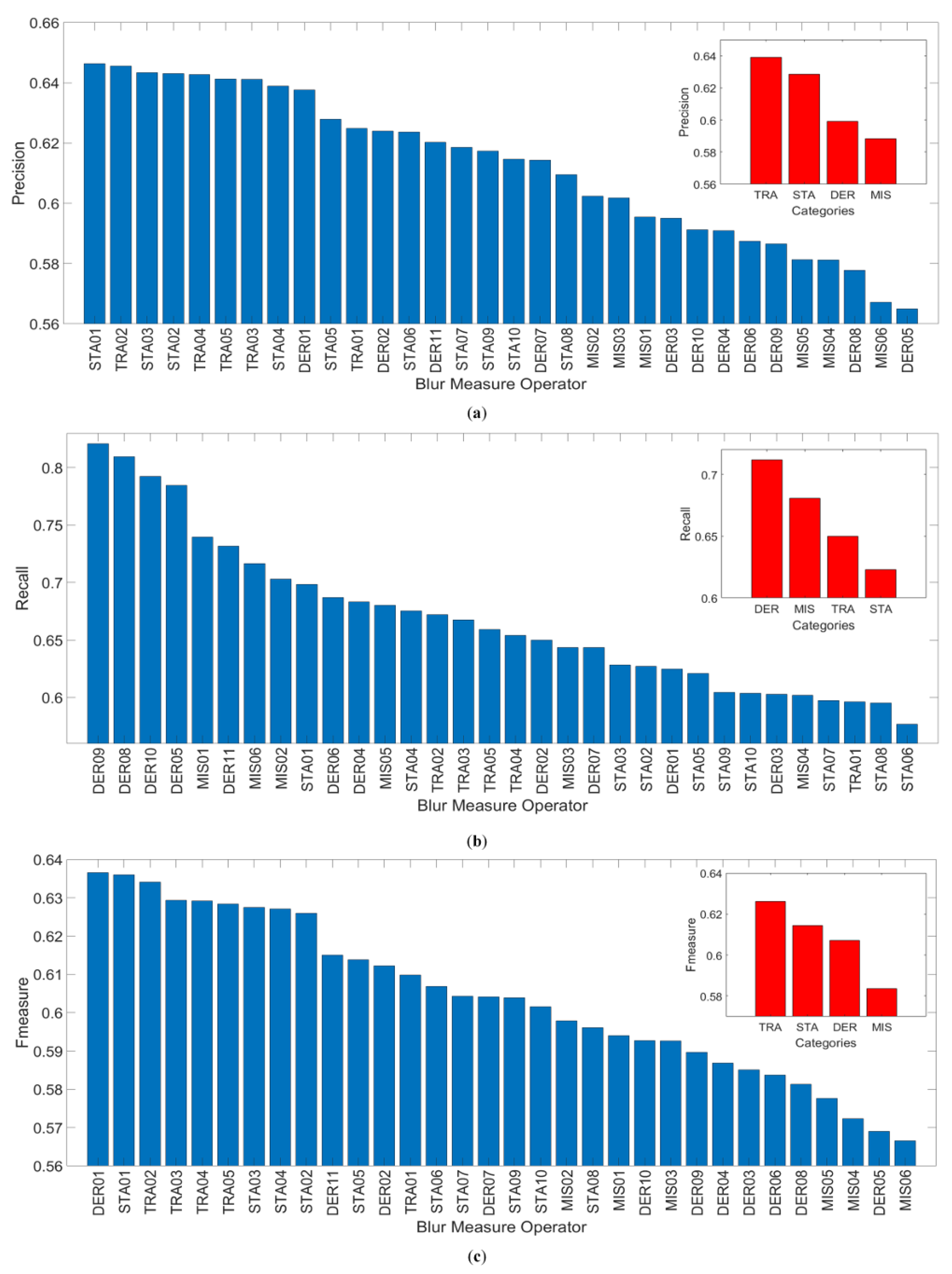
4.2. Quantitative Analysis
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A. Blur Measure Operators
Appendix A.1. Derivative-Based Operators
Appendix A.2. Statistical-Based Operators
Appendix A.3. Transform-Based Operators
Appendix A.4. Miscellaneous Operators
References
- Liu, R.; Li, Z.; Jia, J. Image partial blur detection and classification. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2008), Anchorage, AK, USA, 24–26 June 2008; pp. 1–8. [Google Scholar]
- Jiang, P.; Ling, H.; Yu, J.; Peng, J. Salient region detection by ufo: Uniqueness, focusness and objectness. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 1976–1983. [Google Scholar]
- Derpanis, K.G.; Lecce, M.; Daniilidis, K.; Wildes, R.P. Dynamic scene understanding: The role of orientation features in space and time in scene classification. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 16–21 June 2012; pp. 1306–1313. [Google Scholar]
- Bahrami, K.; Kot, A.C.; Fan, J. A novel approach for partial blur detection and segmentation. In Proceedings of the 2013 IEEE International Conference on Multimedia and Expo (ICME), San Jose, CA, USA, 15–19 July 2013; pp. 1–6. [Google Scholar]
- Bae, S.; Durand, F. Defocus magnification. In Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2007; Volume 26, pp. 571–579. [Google Scholar]
- Dandres, L.; Salvador, J.; Kochale, A.; Susstrunk, S. Non parametric blur map regression for depth of field extension. IEEE Trans. Image Process. 2016, 25, 1660–1673. [Google Scholar] [CrossRef] [PubMed]
- Lin, J.; Ji, X.; Xu, W.; Dai, Q. Absolute depth estimation froma single defocused image. IEEE Trans. Image Process. 2013, 22, 4545–4550. [Google Scholar] [PubMed]
- Tang, C.; Hou, C.; Song, Z. Defocus map estimation from a single image via spectrum contrast. Opt. Lett. 2013, 38, 1706–1708. [Google Scholar] [CrossRef] [PubMed]
- Chen, D.J.; Chen, H.T.; Chang, L.W. Fast defocus map estimation. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 3962–3966. [Google Scholar]
- Gast, J.; Sellent, A.; Roth, S. Parametric Object Motion from Blur. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1846–1854. [Google Scholar]
- Shi, J.; Xu, L.; Jia, J. Discriminative blur detection features. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2965–2972. [Google Scholar]
- Shi, J.; Xu, L.; Jia, J. Just noticeable defocus blur detection and estimation. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 657–665. [Google Scholar]
- Tang, C.; Wu, J.; Hou, Y.; Wang, P.; Li, W. A Spectral and Spatial Approach of Coarse-to-Fine Blurred Image Region Detection. IEEE Signal Process. Lett. 2016, 23, 1652–1656. [Google Scholar] [CrossRef]
- Yi, X.; Eramian, M. LBP-based segmentation of defocus blur. IEEE Trans. Image Process. 2016, 25, 1626–1638. [Google Scholar] [CrossRef] [PubMed]
- Zhu, T.; Karam, L.J. Efficient perceptual-based spatially varying out-of-focus blur detection. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 2673–2677. [Google Scholar]
- Su, B.; Lu, S.; Tan, C.L. Blurred image region detection and classification. In Proceedings of the 19th ACM International Conference on Multimedia, Scottsdale, AZ, USA, 28 November–1 December 2011; pp. 1397–1400. [Google Scholar]
- Zhao, J.; Feng, H.; Xu, Z.; Li, Q.; Tao, X. Automatic blur region segmentation approach using image matting. Signal Image Video Process. 2013, 7, 1173–1181. [Google Scholar] [CrossRef]
- Lai, W.S.; Huang, J.B.; Hu, Z.; Ahuja, N.; Yang, M.H. A comparative study for single image blind deblurring. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 1701–1709. [Google Scholar]
- Pertuz, S.; Puig, D.; Garcia, M.A. Analysis of focus measure operators for shape-from-focus. Pattern Recognit. 2013, 46, 1415–1432. [Google Scholar] [CrossRef]
- Wang, J.Z.; Li, J.; Gray, R.M.; Wiederhold, G. Unsupervised multiresolution segmentation for images with low depth of field. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 85–90. [Google Scholar] [CrossRef]
- Zhou, C.; Cossairt, O.; Nayar, S. Depth from diffusion. In Proceedings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 13–18 June 2010; pp. 1110–1117. [Google Scholar]
- Elder, J.H.; Zucker, S.W. Local scale control for edge detection and blur estimation. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 699–716. [Google Scholar] [CrossRef]
- Namboodiri, V.P.; Chaudhuri, S. Recovery of relative depth from a single observation using an uncalibrated (real-aperture) camera. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2008), Anchorage, AK, USA, 23–28 June 2008; pp. 1–6. [Google Scholar]
- Tai, Y.W.; Brown, M.S. Single image defocus map estimation using local contrast prior. In Proceedings of the 2009 16th IEEE International Conference on Image Processing (ICIP), Cairo, Egypt, 7–12 November 2009; pp. 1797–1800. [Google Scholar]
- Zhuo, S.; Sim, T. Defocus map estimation from a single image. Pattern Recognit. 2011, 44, 1852–1858. [Google Scholar] [CrossRef]
- Peng, Y.T.; Zhao, X.; Cosman, P.C. Single underwater image enhancement using depth estimation based on blurriness. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 4952–4956. [Google Scholar]
- Zhang, Y.; Hirakawa, K. Blur processing using double discrete wavelet transform. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1091–1098. [Google Scholar]
- Zhu, X.; Cohen, S.; Schiller, S.; Milanfar, P. Estimating spatially varying defocus blur from a single image. IEEE Trans. Image Process. 2013, 22, 4879–4891. [Google Scholar] [CrossRef] [PubMed]
- Lin, H.T.; Tai, Y.W.; Brown, M.S. Motion regularization for matting motion blurred objects. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2329–2336. [Google Scholar] [PubMed]
- Oliveira, J.P.; Figueiredo, M.A.; Bioucas-Dias, J.M. Parametric blur estimation for blind restoration of natural images: Linear motion and out-of-focus. IEEE Trans. Image Process. 2014, 23, 466–477. [Google Scholar] [CrossRef] [PubMed]
- Golestaneh, S.A.; Karam, L.J. Spatially-Varying Blur Detection Based on Multiscale Fused and Sorted Transform Coefficients of Gradient Magnitudes. arXiv, 2017; arXiv:1703.07478. [Google Scholar]
- Chakrabarti, A.; Zickler, T.; Freeman, W.T. Analyzing spatially-varying blur. In Proceedings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 13–18 June 2010; pp. 2512–2519. [Google Scholar]
- Pan, J.; Hu, Z.; Su, Z.; Lee, H.Y.; Yang, M.H. Soft-segmentation guided object motion deblurring. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 459–468. [Google Scholar]
- Hyun Kim, T.; Ahn, B.; Mu Lee, K. Dynamic scene deblurring. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 3160–3167. [Google Scholar]
- Whyte, O.; Sivic, J.; Zisserman, A.; Ponce, J. Non-uniform deblurring for shaken images. Int. J. Comput. Vis. 2012, 98, 168–186. [Google Scholar] [CrossRef]
- Gupta, A.; Joshi, N.; Zitnick, C.L.; Cohen, M.; Curless, B. Single image deblurring using motion density functions. In Proceedings of the European Conference on Computer Vision, Heraklion, Greece, 5–11 September 2010; pp. 171–184. [Google Scholar]
- Hirsch, M.; Schuler, C.J.; Harmeling, S.; Schölkopf, B. Fast removal of non-uniform camera shake. In Proceedings of the 2011 IEEE International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 463–470. [Google Scholar]
- Shan, Q.; Xiong, W.; Jia, J. Rotational motion deblurring of a rigid object from a single image. In Proceedings of the IEEE 11th International Conference on Computer Vision (ICCV 2007), Rio de Janeiro, Brazil, 14–20 October 2007; pp. 1–8. [Google Scholar]
- Tai, Y.W.; Tan, P.; Brown, M.S. Richardson-Lucy deblurring for scenes under a projective motion path. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 1603–1618. [Google Scholar] [PubMed]
- Raskar, R.; Agrawal, A.; Tumblin, J. Coded exposure photography: motion deblurring using fluttered shutter. ACM Trans. Graph. 2006, 25, 795–804. [Google Scholar] [CrossRef]
- Tai, Y.W.; Du, H.; Brown, M.S.; Lin, S. Correction of spatially varying image and video motion blur using a hybrid camera. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1012–1028. [Google Scholar] [PubMed]
- Levin, A.; Lischinski, D.; Weiss, Y. A closed-form solution to natural image matting. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 228–242. [Google Scholar] [CrossRef] [PubMed]
- Dai, S.; Wu, Y. Removing partial blur in a single image. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2009), Miami, FL, USA, 20–25 June 2009; pp. 2544–2551. [Google Scholar]
- Tai, Y.W.; Kong, N.; Lin, S.; Shin, S.Y. Coded exposure imaging for projective motion deblurring. In Proceedings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 13–18 June 2010; pp. 2408–2415. [Google Scholar]
- Pan, J.; Hu, Z.; Su, Z.; Yang, M.H. Deblurring text images via L0-regularized intensity and gradient prior. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2901–2908. [Google Scholar]
- Xu, L.; Jia, J. Two-phase kernel estimation for robust motion deblurring. In European Conference on Computer Vision; Springer: Berlin, Germeny, 2010; pp. 157–170. [Google Scholar]
- Fattal, R.; Goldstein, A. Blur-Kernel Estimation From Spectral Irregularities. U.S. Patent 9,008,453, 14 April 2015. [Google Scholar]
- Hu, Z.; Yang, M.H. Good regions to deblur. In Proceedings of the Computer Vision–ECCV 2012, Florence, Italy, 7–13 October 2012; pp. 59–72. [Google Scholar]
- Zhu, X.; Šroubek, F.; Milanfar, P. Deconvolving PSFs for a better motion deblurring using multiple images. In Proceedings of the Computer Vision–ECCV 2012, Florence, Italy, 7–13 October 2012; pp. 636–647. [Google Scholar]
- Levin, A.; Fergus, R.; Durand, F.; Freeman, W.T. Image and depth from a conventional camera with a coded aperture. ACM Trans. Graph. 2007, 26, 70. [Google Scholar] [CrossRef]
- Cheong, H.; Chae, E.; Lee, E.; Jo, G.; Paik, J. Fast image restoration for spatially varying defocus blur of imaging sensor. Sensors 2015, 15, 880–898. [Google Scholar] [CrossRef] [PubMed]
- Chan, S.H.; Nguyen, T.Q. Single image spatially variant out-of-focus blur removal. In Proceedings of the 18th IEEE International Conference on Image Processing (ICIP), Brussels, Belgium, 11–14 September 2011; pp. 677–680. [Google Scholar]
- Yan, Q.; Xu, L.; Shi, J.; Jia, J. Hierarchical saliency detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1155–1162. [Google Scholar]
- Murphy, K.P.; Weiss, Y.; Jordan, M.I. Loopy belief propagation for approximate inference: An empirical study. In Proceedings of the Fifteenth Conference on Uncertainty in Artificial Intelligence, Stockholm, Sweden, 30 July–1 August 1999; Morgan Kaufmann Publishers Inc.: Burlington, MA, USA, 1999; pp. 467–475. [Google Scholar]
- Van Rijsbergen, C. Information Retrieval. Dept. of Computer Science, University of Glasgow, 1979. Available online: citeseer.ist.psu.edu/vanrijsbergen79information.html (accessed on 17 May 2018).
- Li, X.; Wang, Y.Y.; Acero, A. Learning query intent from regularized click graphs. In Proceedings of the 31st Annual International ACM SIGIR Conference on Research and Development in Information Retrieval, Singapore, 20–24 July 2008; pp. 339–346. [Google Scholar]
- Takayama, N.; Takahashi, H. Blur map generation based on local natural image statistics for partial blur segmentation. IEICE Trans. Inf. Syst. 2017, 100, 2984–2992. [Google Scholar] [CrossRef]
- Geusebroek, J.M.; Cornelissen, F.; Smeulders, A.W.; Geerts, H. Robust autofocusing in microscopy. Cytom. Part A 2000, 39, 1–9. [Google Scholar] [CrossRef]
- Subbarao, M.; Choi, T.S.; Nikzad, A. Focusing techniques. Opt. Eng. 1993, 32, 2824–2836. [Google Scholar] [CrossRef]
- Eskicioglu, A.M.; Fisher, P.S. Image quality measures and their performance. IEEE Trans. Commun. 1995, 43, 2959–2965. [Google Scholar] [CrossRef]
- Pech-Pacheco, J.L.; Cristóbal, G.; Chamorro-Martinez, J.; Fernández-Valdivia, J. Diatom autofocusing in brightfield microscopy: A comparative study. In Proceedings of the 15th International Conference on Pattern Recognition, Barcelona, Spain, 3–7 September 2000; Volume 3, pp. 314–317. [Google Scholar]
- Nayar, S.K.; Nakagawa, Y. Shape from focus. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 16, 824–831. [Google Scholar] [CrossRef]
- Thelen, A.; Frey, S.; Hirsch, S.; Hering, P. Improvements in shape-from-focus for holographic reconstructions with regard to focus operators, neighborhood-size, and height value interpolation. IEEE Trans. Image Process. 2009, 18, 151–157. [Google Scholar] [CrossRef] [PubMed]
- Pan, J.; Sun, D.; Pfister, H.; Yang, M.H. Blind image deblurring using dark channel prior. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1628–1636. [Google Scholar]
- Vu, C.T.; Phan, T.D.; Chandler, D.M. A Spectral and Spatial Measure of Local Perceived Sharpness in Natural Images. IEEE Trans. Image Process. 2012, 21, 934–945. [Google Scholar] [CrossRef] [PubMed]
- Krotkov, E.; Martin, J.P. Range from focus. In Proceedings of the 1986 IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 7–10 April 1986; Volume 3, pp. 1093–1098. [Google Scholar]
- Santos, A.; Ortiz de Solórzano, C.; Vaquero, J.J.; Pena, J.; Malpica, N.; Del Pozo, F. Evaluation of autofocus functions in molecular cytogenetic analysis. J. Microsc. 1997, 188, 264–272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shen, C.H.; Chen, H.H. Robust focus measure for low-contrast images. In Proceedings of the International Conference on Consumer Electronics (ICCE’06), Las Vegas, NV, USA, 7–11 January 2006; pp. 69–70. [Google Scholar]
- Lee, S.Y.; Yoo, J.T.; Kumar, Y.; Kim, S.W. Reduced energy-ratio measure for robust autofocusing in digital camera. IEEE Signal Process. Lett. 2009, 16, 133–136. [Google Scholar] [CrossRef]
- Yang, G.; Nelson, B.J. Wavelet-based autofocusing and unsupervised segmentation of microscopic images. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), Las Vegas, NV, USA, 27–31 October 2003; Volume 3, pp. 2143–2148. [Google Scholar]
- Xie, H.; Rong, W.; Sun, L. Wavelet-based focus measure and 3-d surface reconstruction method for microscopy images. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 229–234. [Google Scholar]
- Nanda, H.; Cutler, R. Practical Calibrations for a Real-Time Digital Omnidirectional Camera. 2001. CVPR Technical Sketch. Available online: https://www.researchgate.net/publication/228952354_Practical_calibrations_for_a_real-time_digital_omnidirectional_camera (accessed on 17 May 2018).
- Helmli, F.S.; Scherer, S. Adaptive shape from focus with an error estimation in light microscopy. In Proceedings of the 2nd International Symposium on Image and Signal Processing and Analysis (ISPA 2001), Pula, Croatia, 19–21 June 2001; pp. 188–193. [Google Scholar]
- Minhas, R.; Mohammed, A.A.; Wu, Q.J.; Sid-Ahmed, M.A. 3D shape from focus and depth map computation using steerable filters. In Proceedings of the International Conference Image Analysis and Recognition, Halifax, NC, Canada, 6–8 July 2009; pp. 573–583. [Google Scholar]
- Huang, W.; Jing, Z. Evaluation of focus measures in multi-focus image fusion. Pattern Recognit. Lett. 2007, 28, 493–500. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sr. No. | Blur Operator | Abbr. | Sr. No. | Blur Operator | Abbr. |
|---|---|---|---|---|---|
| 1 | Gradient Histogram Span | DER01 | 17 | Gray-level local variance | STA06 |
| 2 | Kurtosis | DER02 | 18 | Normalized Gray-level variance | STA07 |
| 3 | Gaussian derivative | DER03 | 19 | Histogram entropy | STA08 |
| 4 | Gradient energy | DER04 | 20 | DCT energy ratio | STA09 |
| 5 | Squared gradient | DER05 | 21 | DCT reduced energy ratio | STA10 |
| 7 | Tenengrad variance | DER07 | 23 | Power spectrum | TRA02 |
| 7 | Tenengrad variance | DER07 | 23 | High-frequency multiscale Fusion and Sort Transform (HiFST) | TRA02 |
| 8 | Energy of Laplacian | DER08 | 24 | Sum of wavelet coefficients | TRA03 |
| 9 | Modified Laplacian | DER09 | 25 | Variance of wavelet coefficients | TRA04 |
| 10 | Diagonal modified Laplacian | DER10 | 26 | Ratio of wavelet coefficients | TRA05 |
| 11 | Variance of Laplacian | DER11 | 27 | Brenner’s measure | MIS01 |
| 12 | Singular value decomposition | STA01 | 28 | Image contrast | MIS02 |
| 13 | Sparsity of dark channel | STA02 | 29 | Image curvature measure | MIS03 |
| 14 | Total variation | STA03 | 30 | Steerable filters-based | MIS04 |
| 15 | Local binary pattern | STA04 | 31 | Spatial frequency | MIS05 |
| 16 | Gray-level variance | STA05 | 32 | Vollath’s autocorrelation | MIS06 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, U.; Mahmood, M.T. Analysis of Blur Measure Operators for Single Image Blur Segmentation. Appl. Sci. 2018, 8, 807. https://doi.org/10.3390/app8050807
Ali U, Mahmood MT. Analysis of Blur Measure Operators for Single Image Blur Segmentation. Applied Sciences. 2018; 8(5):807. https://doi.org/10.3390/app8050807
Chicago/Turabian StyleAli, Usman, and Muhammad Tariq Mahmood. 2018. "Analysis of Blur Measure Operators for Single Image Blur Segmentation" Applied Sciences 8, no. 5: 807. https://doi.org/10.3390/app8050807
APA StyleAli, U., & Mahmood, M. T. (2018). Analysis of Blur Measure Operators for Single Image Blur Segmentation. Applied Sciences, 8(5), 807. https://doi.org/10.3390/app8050807