In many aerospace applications, the reliability of an inertial sensor is critically important [
1]. Two methods are used to enhance the navigation system’s reliability: one is increasing the precision of a single inertial device, whose convergence, however, is limited; another is integrating multiple inertial sensors (more than three) by using appropriate redundant configurations in order to greatly improve the commonly-used navigation system’s reliability and precision [
2]. The Delta 4 rocket of the USA uses two sets of laser strapdown inertial measurement unit (IMU) with the relative-rotation installation. The European Space Agency’s (ESA) Ariane 5 rocket uses two sets of laser gyroscope strapdown IMU with the coaxial installation. Japan’s H-2A rocket uses three orthogonal axes plus an inclined axis configuration of the strapdown IMU. To provide information on redundant measurement and improve the reliability and accuracy of their navigation systems, most of China’s new launch vehicles also use the redundant strapdown IMU; for example, its CZ-6 rocket uses double-eight strapdown inertial sensors, and its YZ-1 rocket uses ten redundant strapdown inertial sensors. However, if an inertial sensor fails during flight, the information on failure to be fused may pollute all of the information on navigation, which is a serious threat to flight safety and harms the navigation system’s performance. For example, the inertial navigation system of China’s CZ-3B rocket failed in 1996. The CZ-3B rocket and the satellite mounted on it were destroyed due to sensor failure and caused huge damage to personnel and property. Therefore, it is necessary to conduct timely and accurate fault detection and isolation (FDI) of the redundant IMU in a rocket.
Many scholars developed the parity space approach (generalized likelihood method [
3,
4], the optimal parity vector method [
5,
6,
7] and the singular value decomposition (SVD) method [
8]) for the fault detection and isolation of redundant IMU, whose difference mainly lies in the decoupling matrix construction method. At present, the scholars’ research mainly focuses on improving the parity space approach in order to enhance the navigation performance of the redundant IMU. For example, Kwang [
9] and Lee [
10] proposed a new FDI method which is suitable for two faulty sensors based on the extended parity space approach. In 2012, Lee [
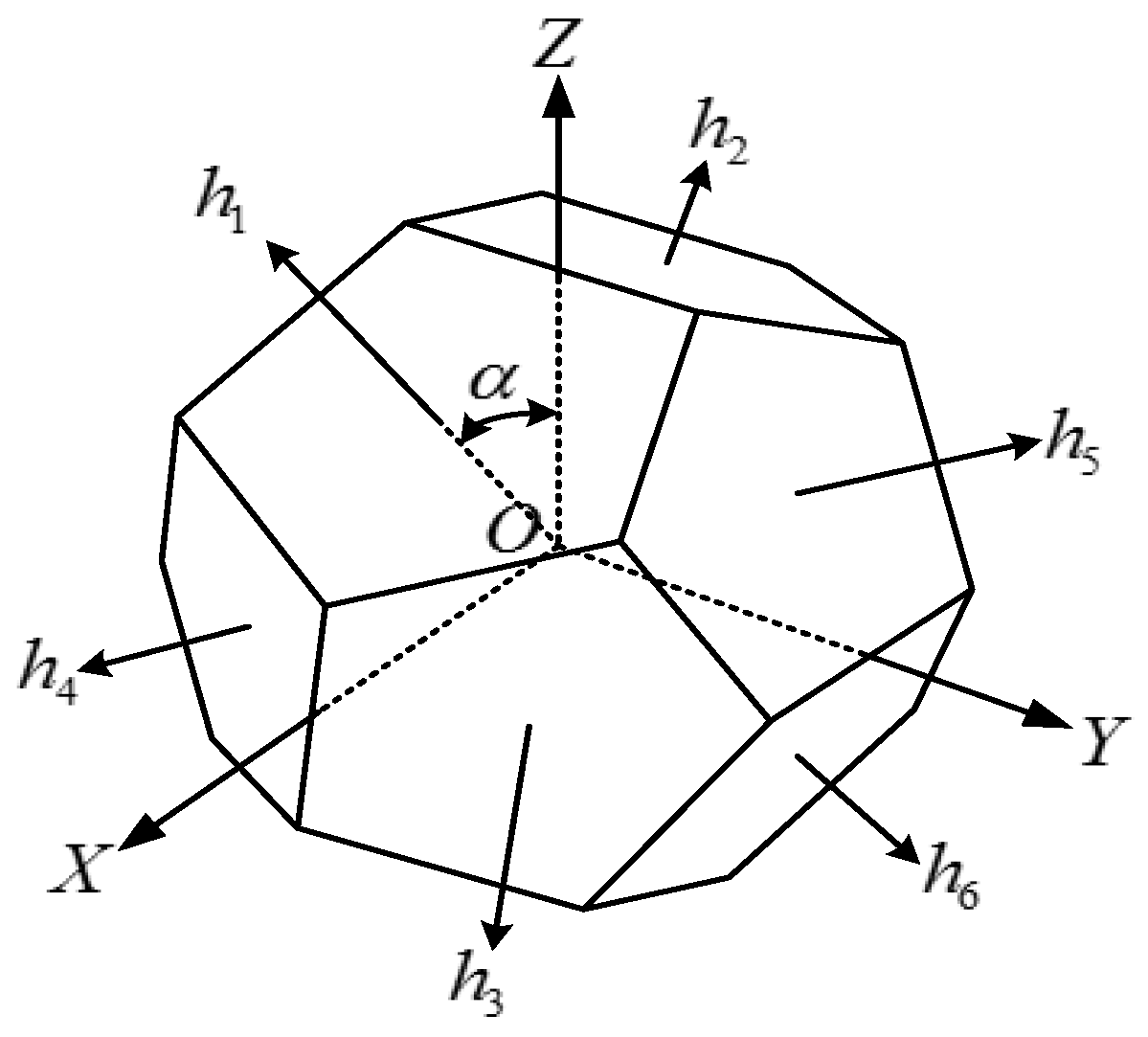
11] applied the parity space analysis method to principal component analysis (PCA): he used six single-axis gyroscopes along the conical surface of a strapdown inertial navigation system (SINS), but this method cannot detect soft fault (small magnitude, which affects navigation performance) successfully. Seung [
12] used the parity equation and the discrete wavelet transform of the hybrid fault detection method for an unmanned aerial vehicle’s (UAV) inertial navigation sensors, which achieved good detection results. Élcio [
13] proposed a fault detection method based on PCA and SVD mainly for minimal-redundancy systems, which divide FDI into two parts and achieves good results on the low-level and step-biased fault. Zhang [
14] found that the decoupling matrix vector of the optimal parity method is linearly relevant and leads to a high false alarm rate. To reduce the high false alarm rate and high isolation error rate of the SVD method presented in [
8], Wen [
15] improved the decoupling matrix construction method with the parity vector unit, obtaining a lower false alarm rate.
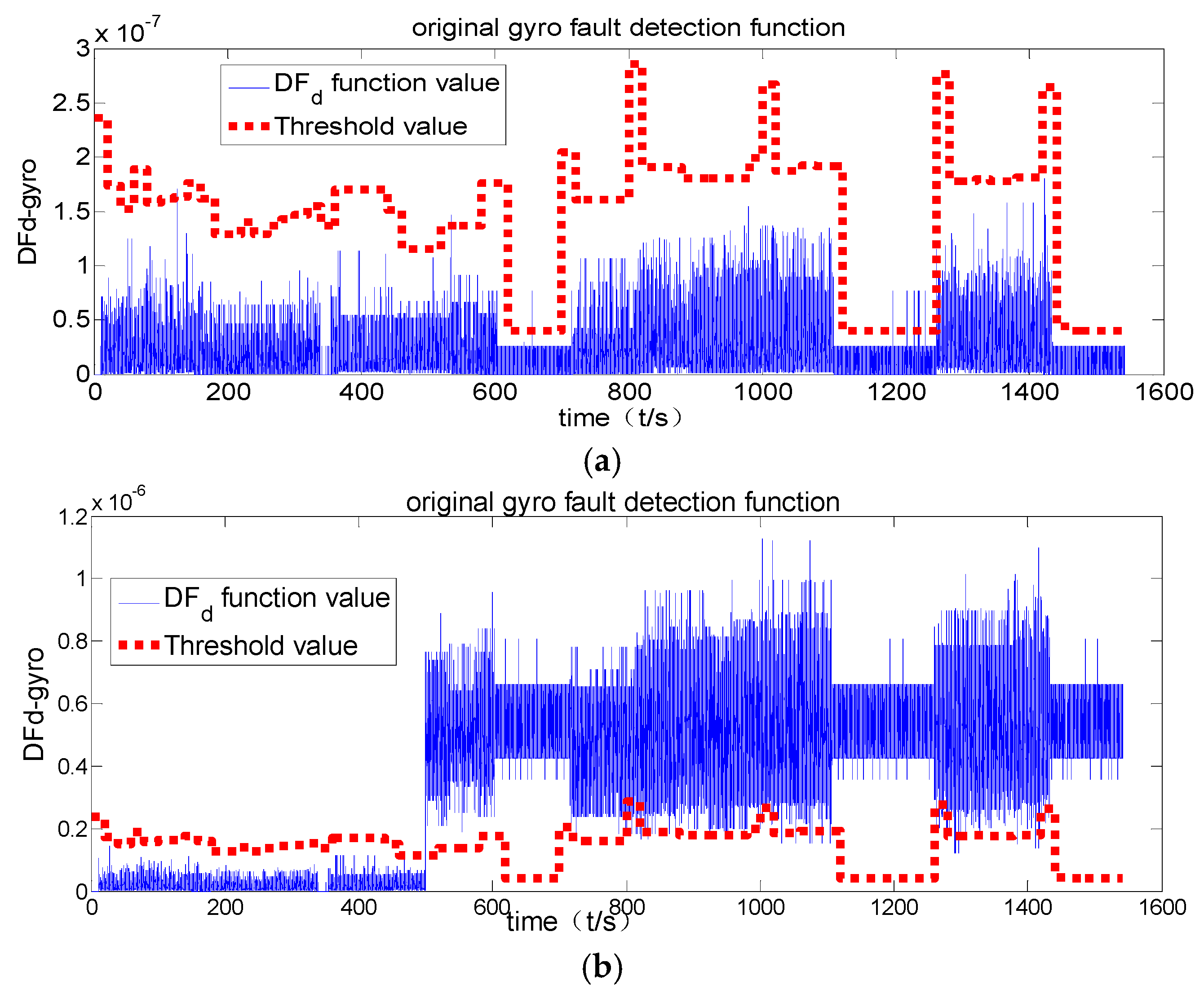
However, the existing approaches cannot detect soft fault correctly after quantization. The angle increment is converted into the number of pulses of the laser gyroscope which has a measurement output. This output is not a real angular velocity but rather the angular increment of the sampling period and the quantization value of the pulse. Similarly, the accelerometer’s output is not a real-time apparent acceleration but the sampling period of the speed increment and its quantization value. The quantization of the laser gyroscope and the accelerometer may disturb the error structure of the original information and bring many transient errors for low maneuvers, which may cause difficulty in fault detection. Yi [
16] only introduced the low-pass filter concept and combined the generalized likelihood test (GLT) method for fault diagnosis.
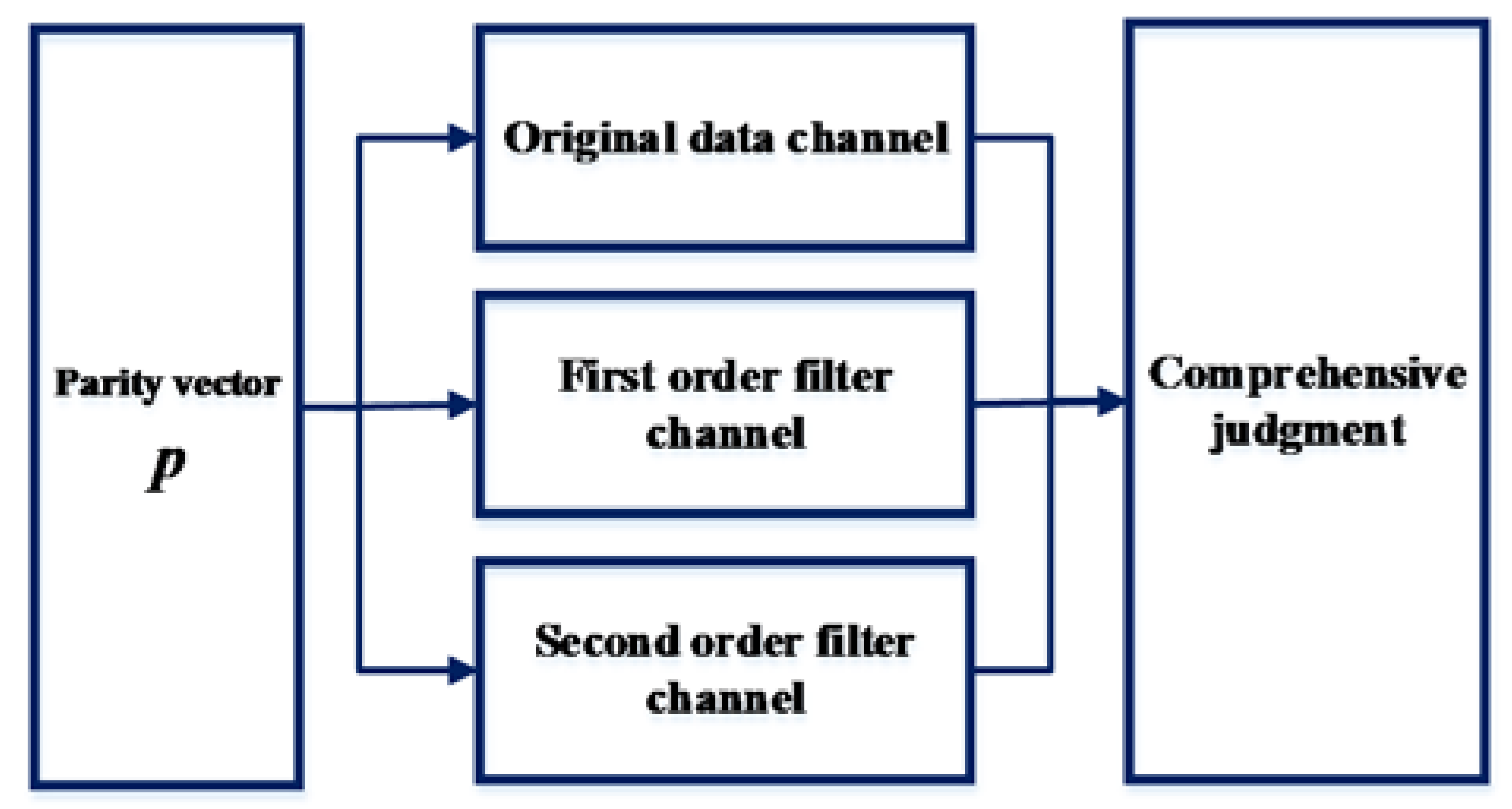
To date, no researchers have put forward a perfect filtering method and theoretically analyzed the FDI of redundant strapdown inertial measurement unit (RIMU). This paper developed the three-channel filters and conducted their theoretical implementation. The method can be utilized well in micro-grid applications such as faults in solar and wind systems [
17,
18,
19,
20,
21]. The paper proposed the constraint conditions of their parameters and analyzed the performance of the weight of different ratios. Thus, this paper is organized as follows:
Section 2 provides a theoretical background to the parity space approach, analyzes the existing problems and presents the constraint conditions of parameters of three-channel filters.
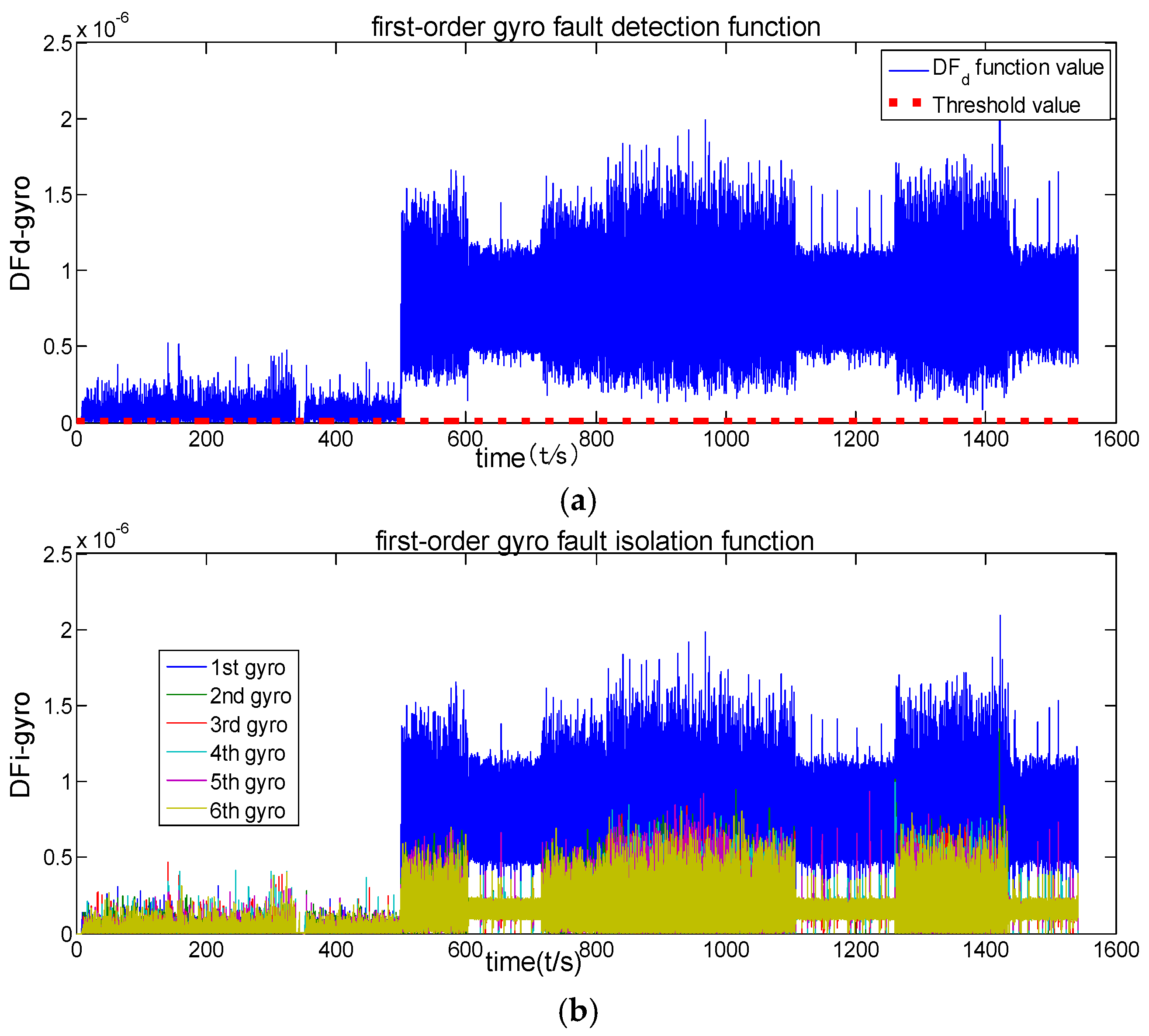
Section 3 gives simulation results and their analysis.
Section 4 presents the conclusions.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}