Multibody Simulation for the Vibration Analysis of a Turbocharged Diesel Engine

 ,
, 
 ,
,  and
and 
Abstract
:
1. Introduction
2. Problem Description and Modeling Approach
2.1. System Dynamic Reduction
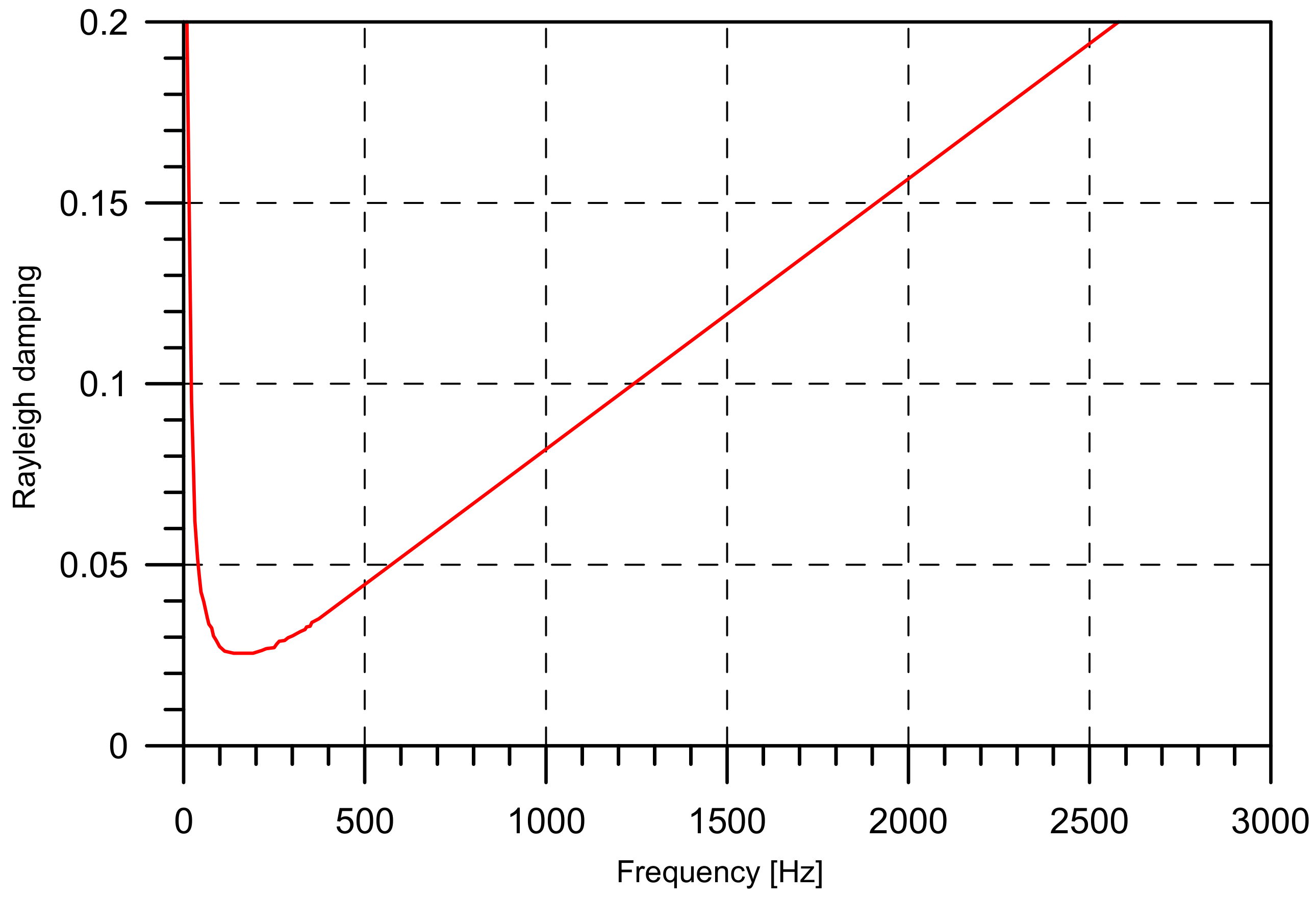
- a and b are the calculated multiplication factors for the mass and stiffness matrix
- the recommended value for f1 is the first crankshaft eigenfrequency
- the recommended value for f2 is 1000 Hz
- the recommended value for d1 at frequency f1 is 0.03
- the recommended value for d2 at frequency f2 is 0.05
2.2. Models of Increasing Complexity
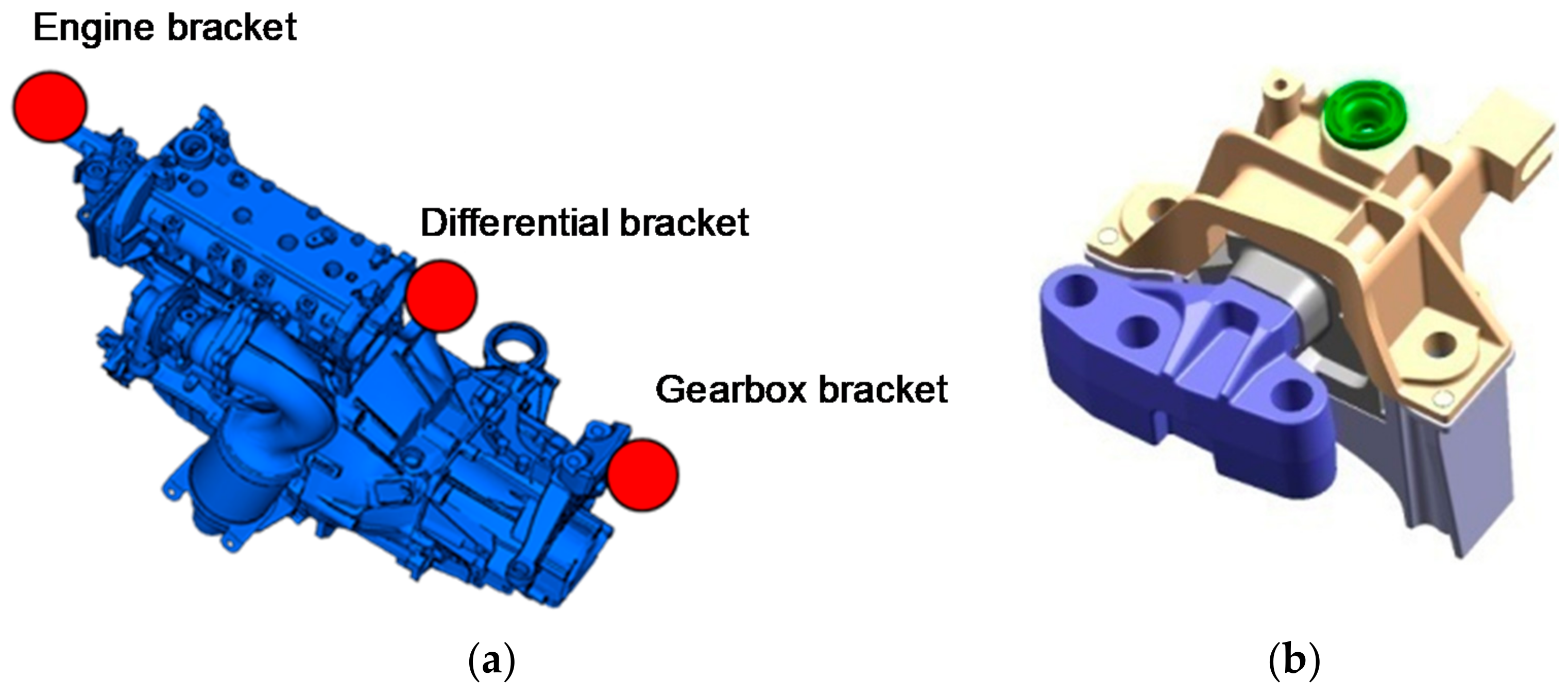
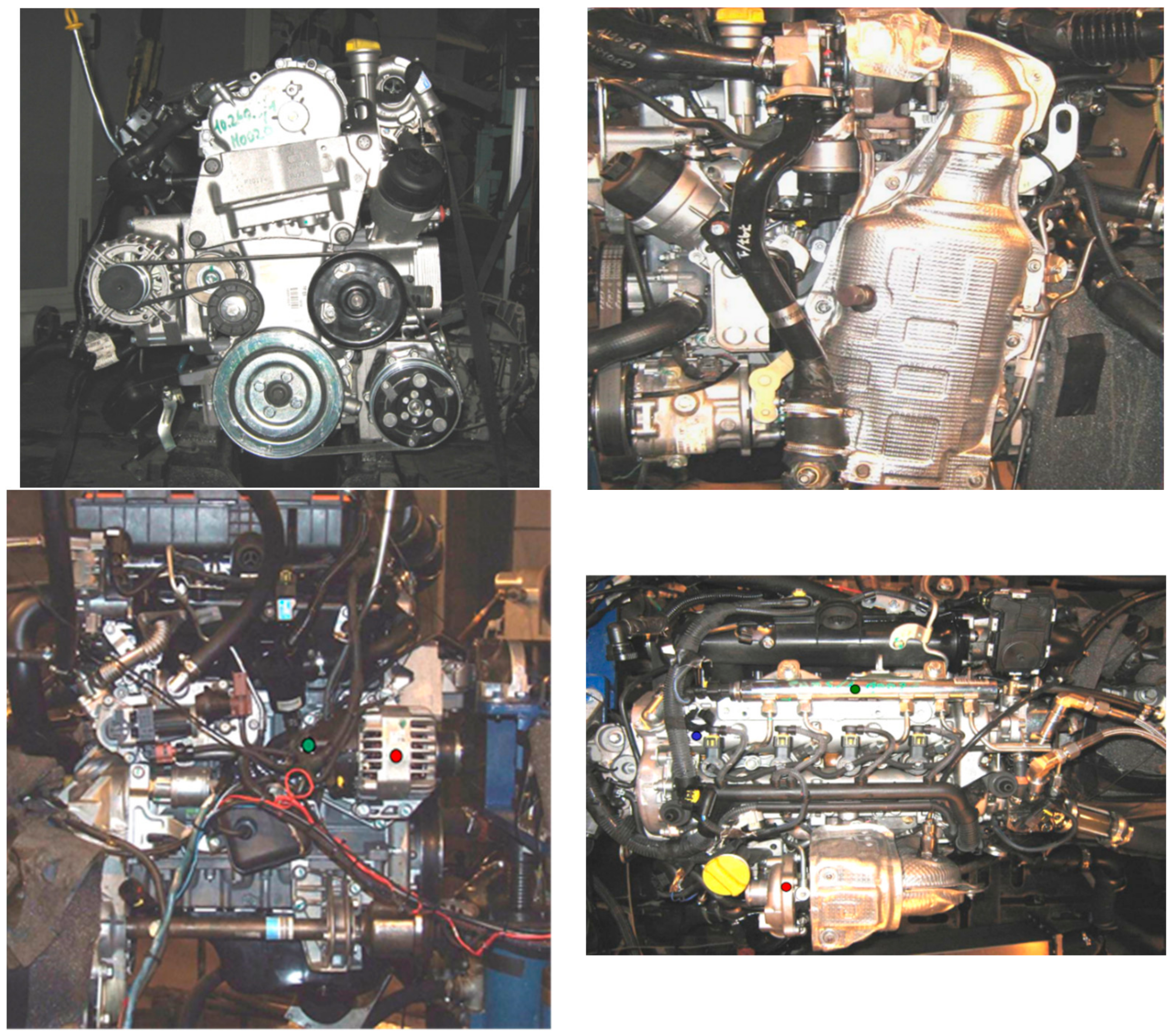
- The first approach, termed SOL1, realizes the simulation of the engine behavior using a rigid body model (Figure 4) and provides for the trend of the motion irregularities at low frequencies, with a first evaluation of the vibrations of the power train support brackets. The powertrain suspension brackets in the engine compartment are three: engine bracket, differential bracket, gearbox bracket (Figure 5a–d). These components are usually simulated in AVL/Excite as joints and treated as massless material points. The joints simulating the brackets were of Table Force/Moment type. This constraint allowed introducing the nonlinear behavior of the dowels stiffness’s; stiffness and damping values were assigned (retrieved from the car company database) in the three directions x, y, z for each bracket and for different relative displacement values. The stiffness and damping values for the power train mounts were provided by the supplier and consist in a nonlinear relation between stiffness/damping and mount deformation.
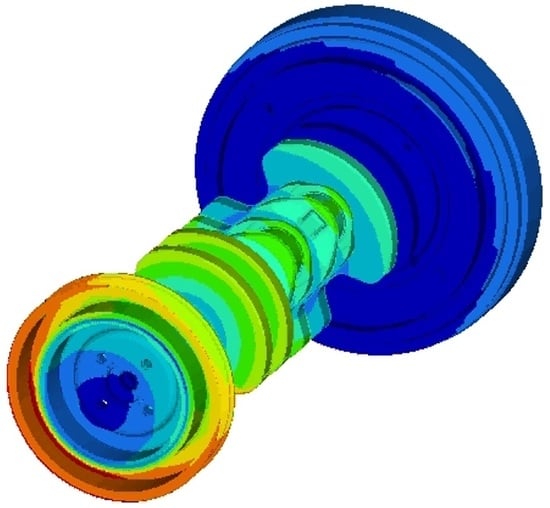
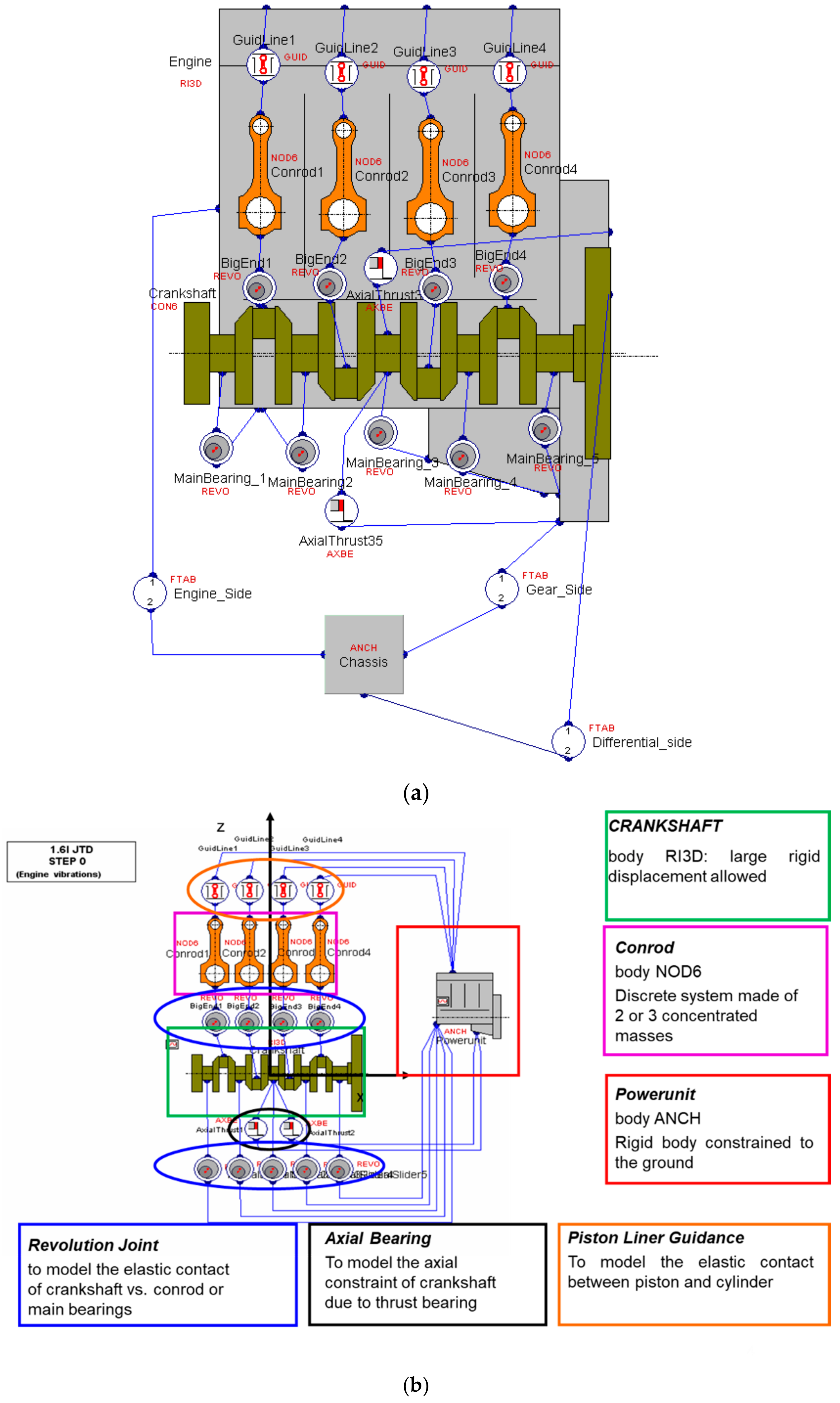
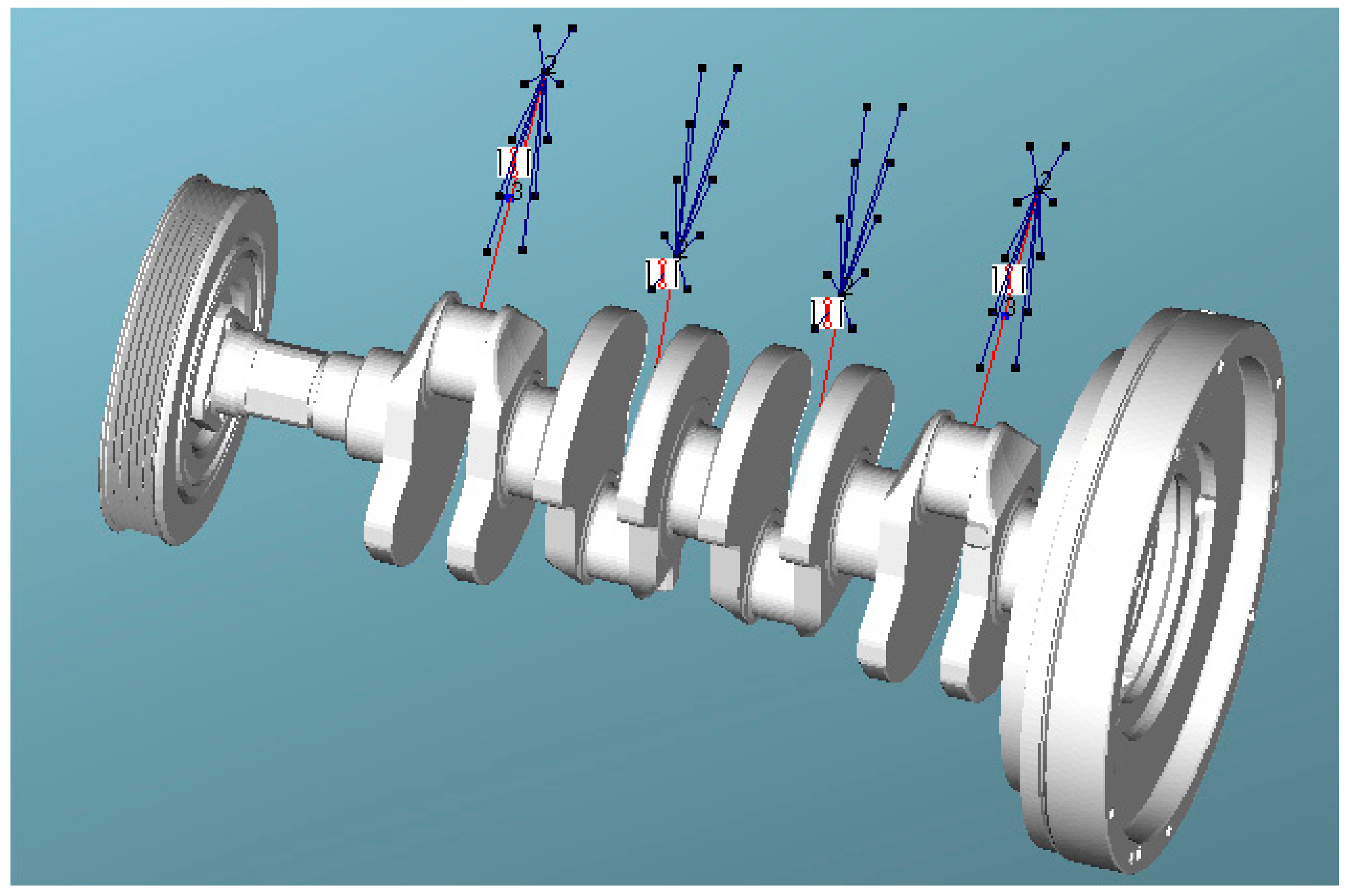
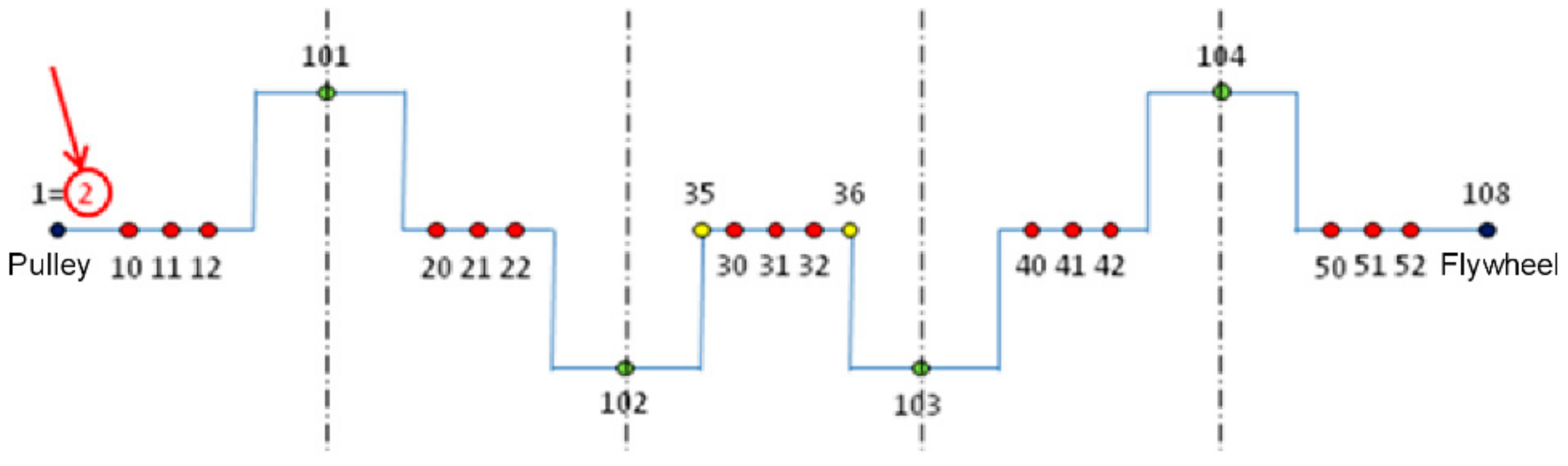
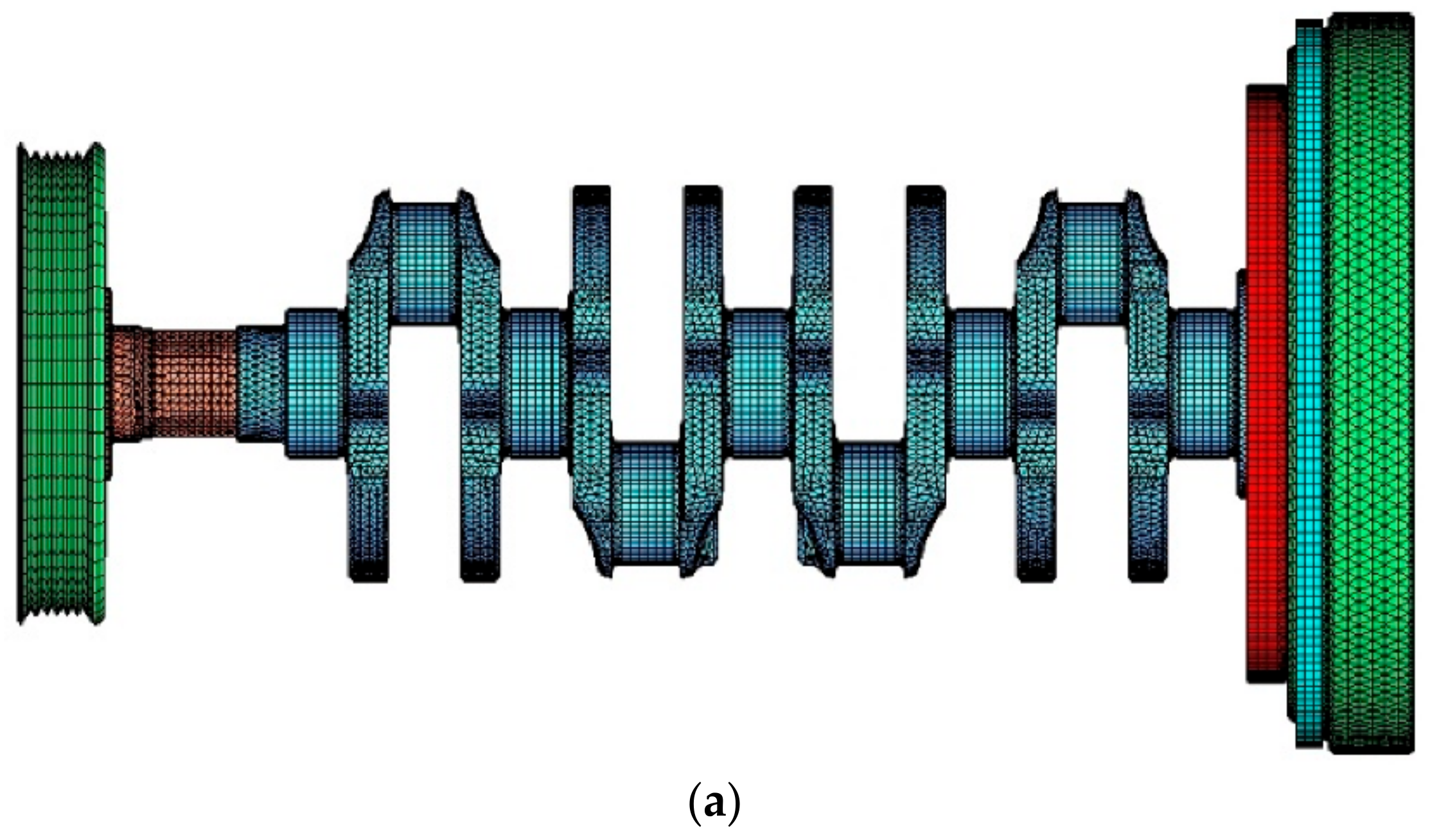
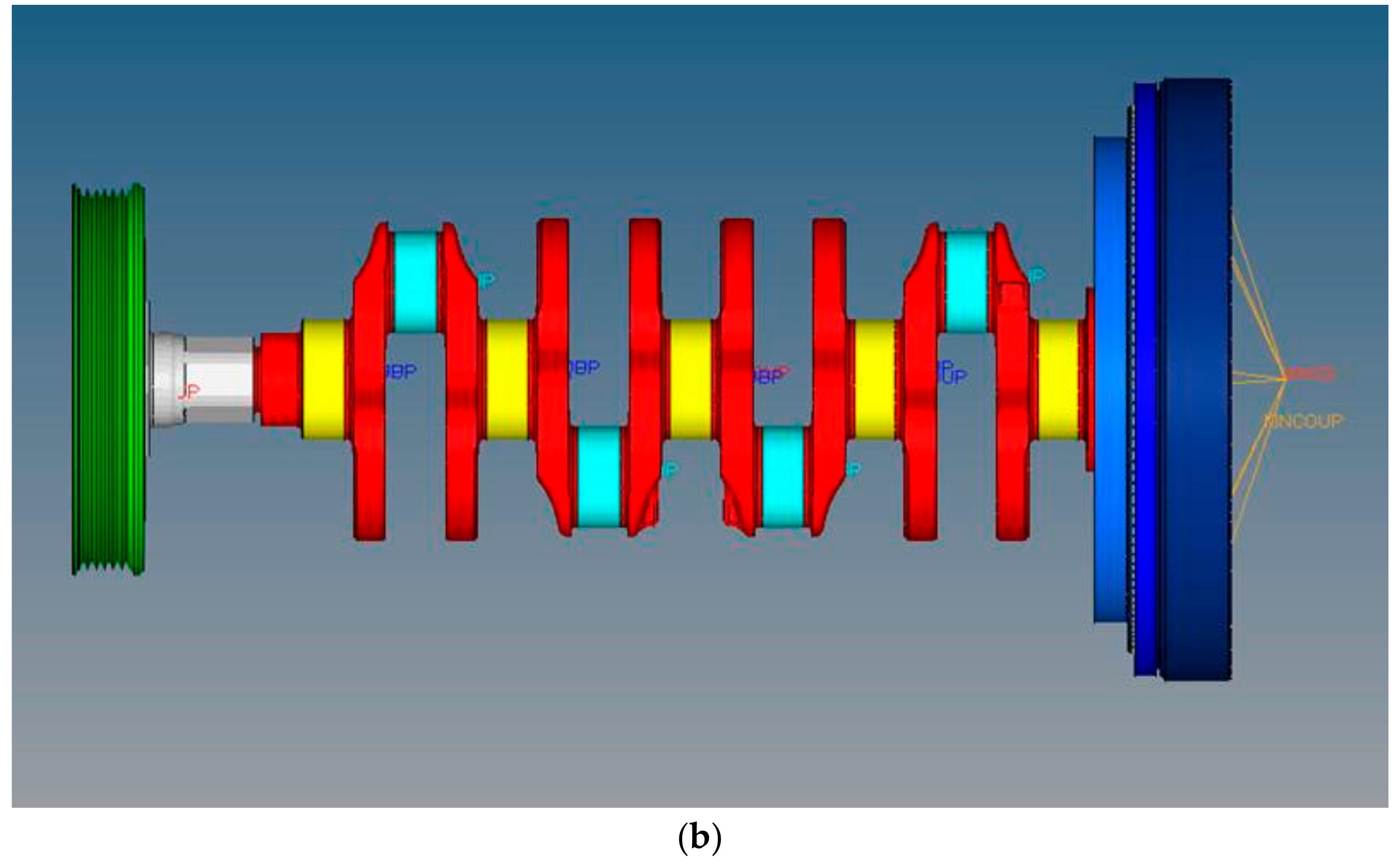
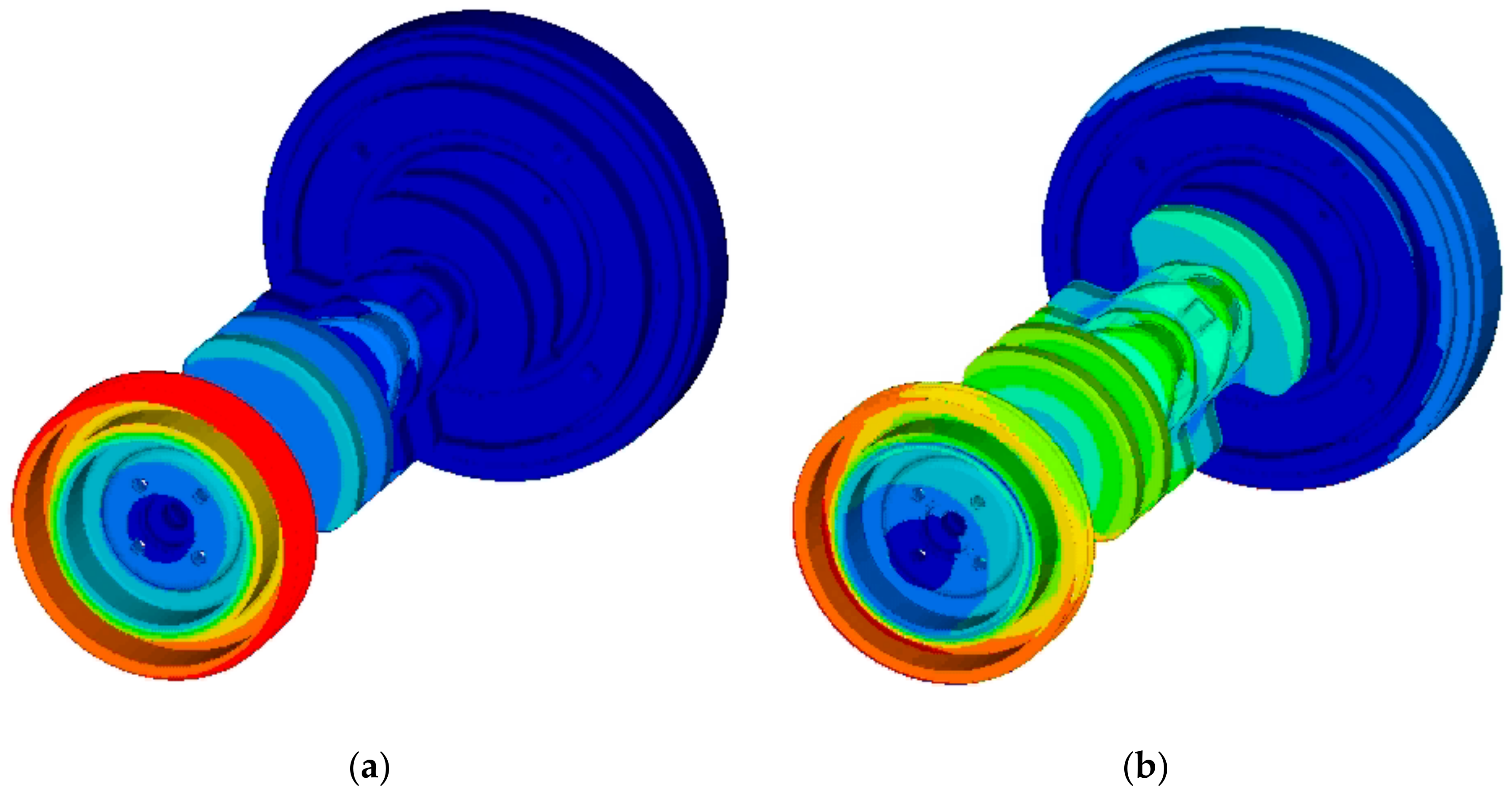
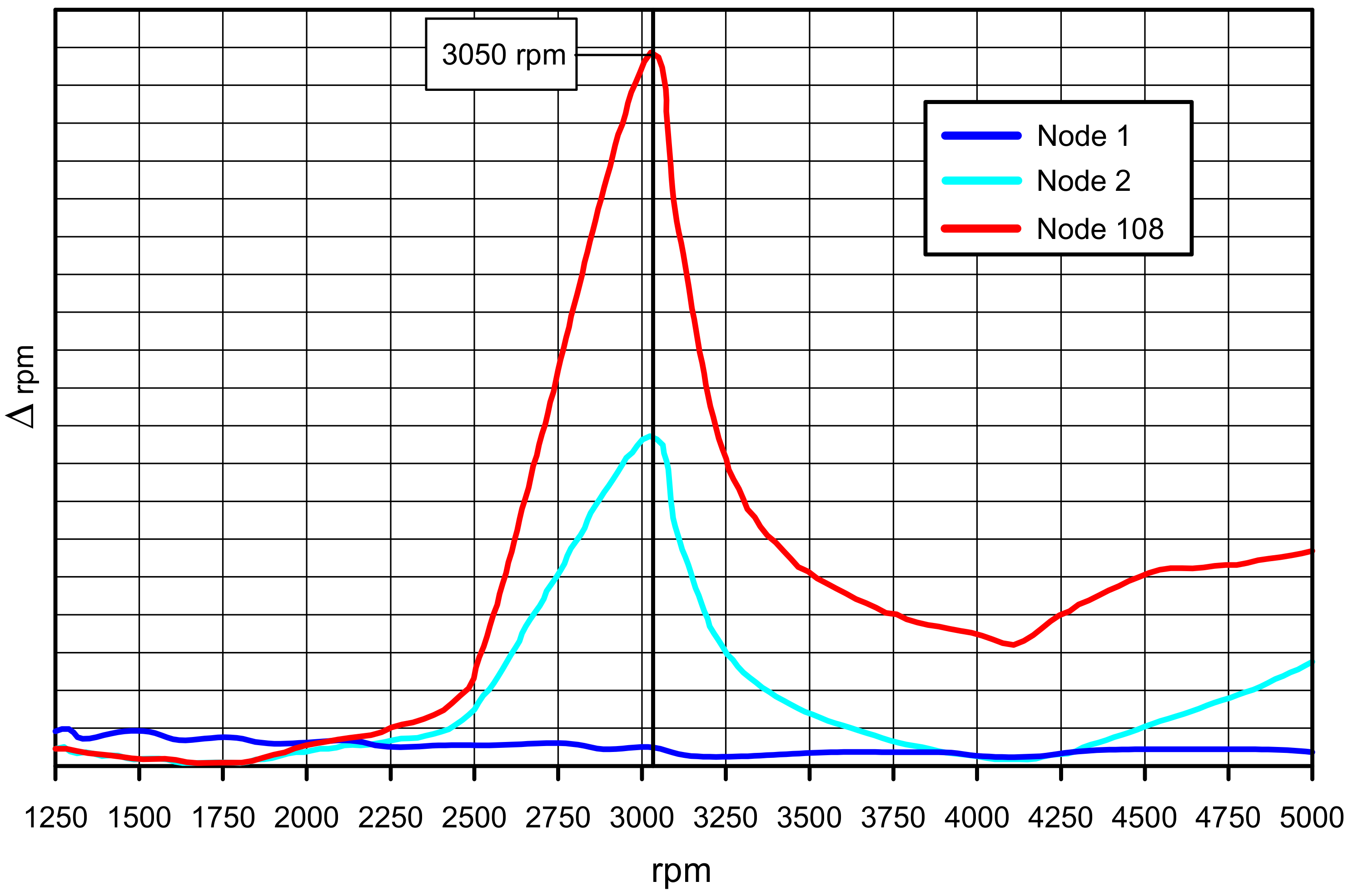
- The second model, termed SOL2, is based on FE modeling of the crankshaft, with pulley and flywheel, in order to consider the flexibility of the crankshaft that, once appropriately condensed, is introduced into the MB calculation code. The aim is to obtain the values of the motion irregularities in addition to the support brackets vibrations. Comparing Figure 6 and Figure 2b, it is possible to see an added condensation node (number 2) as requested by the splitting of pulley in two independent parts (capable of relative motion), the first (node number 1) referring to the shaft end and the second (node number 2) referring to the seismic mass. Now it is possible to point out the impact of torsional modes (in case they are excited) on the motion irregularities and support bracket vibrations. This will be analyzed in the next paragraph.
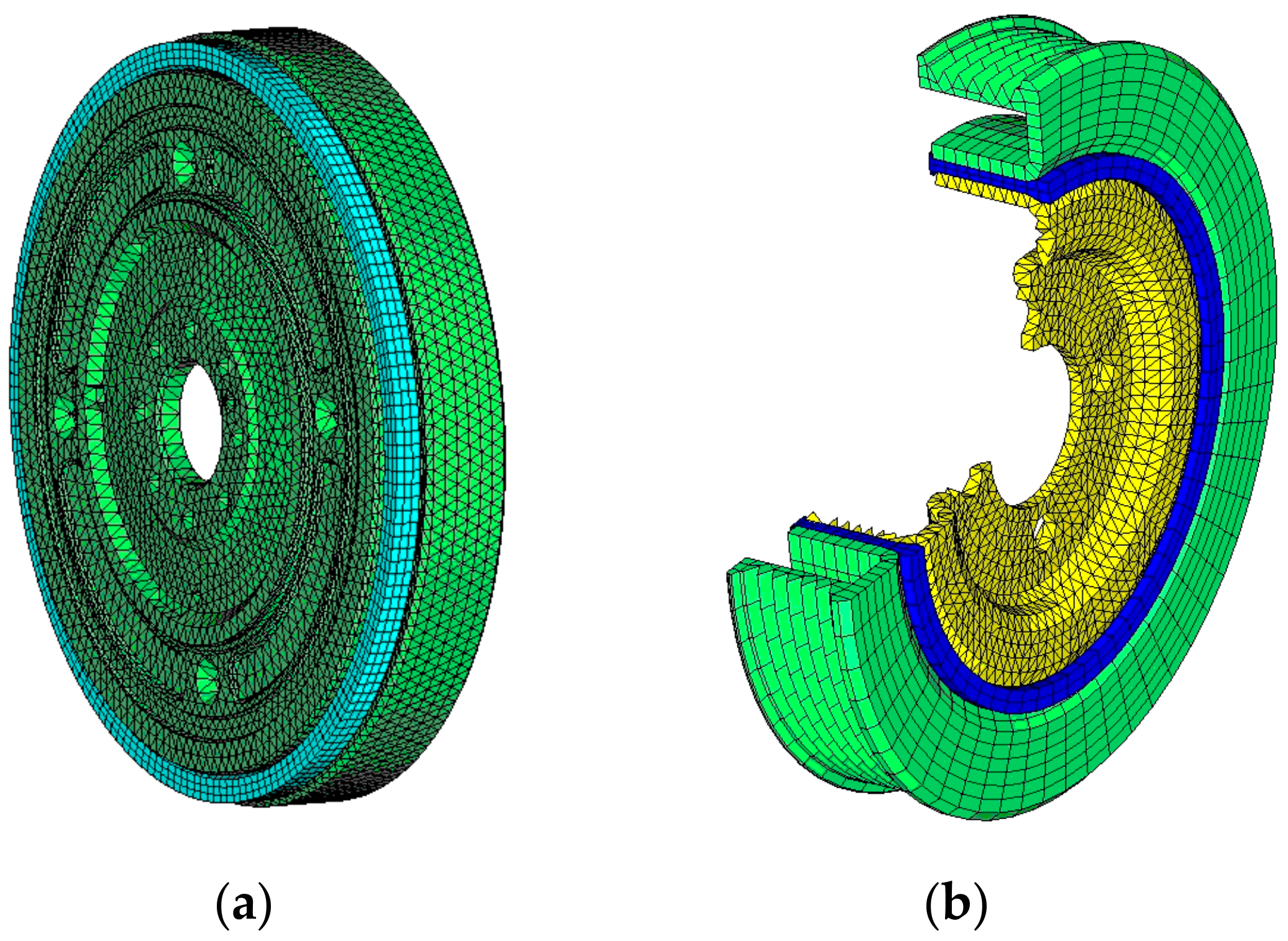
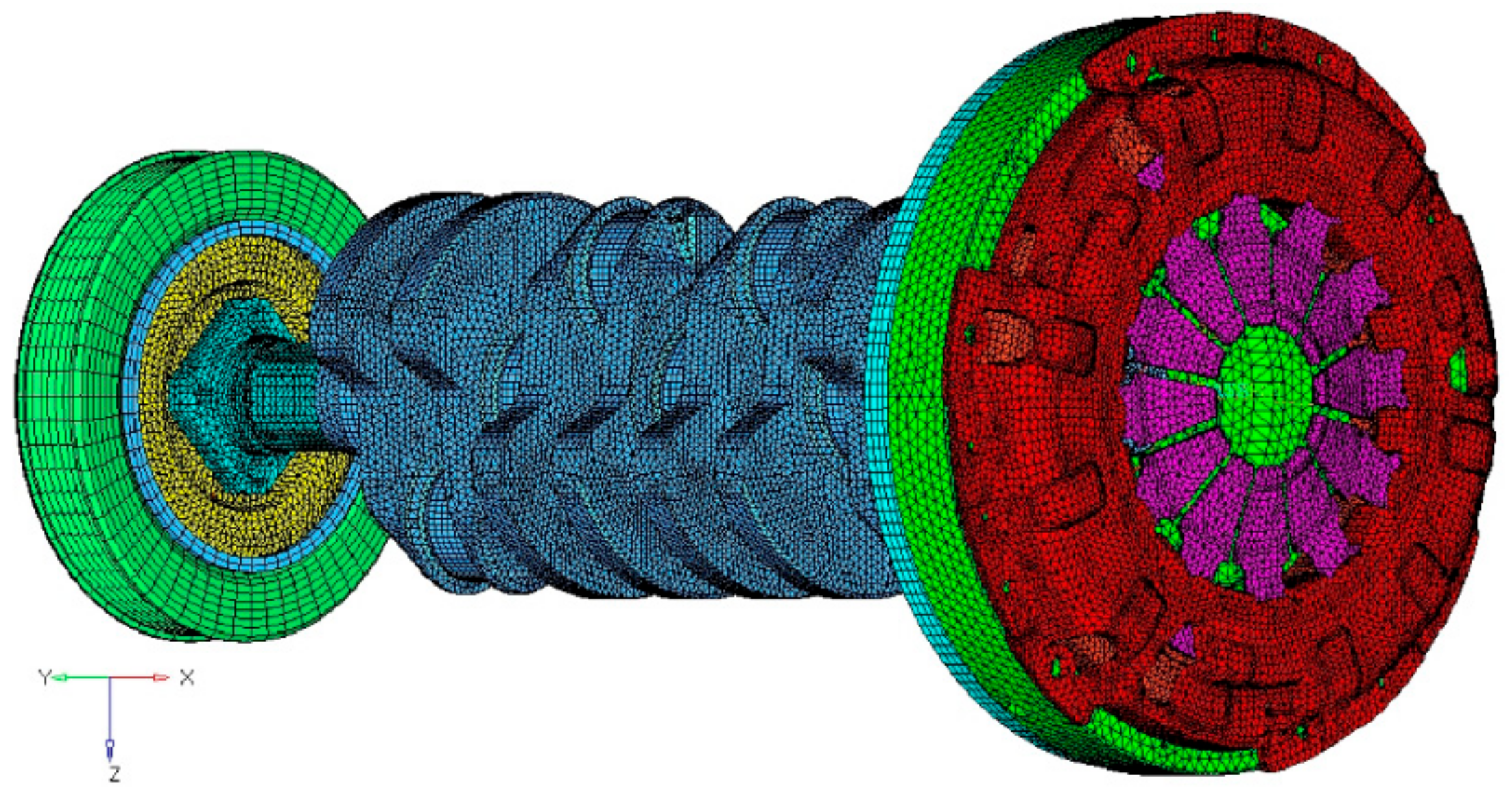
- The third model, termed SOL3, shows the FE modeling for both the previously considered crankshaft and the clutch unit.
2.2.1. Model SOL1
- Stiffness at zero displacement 1e + 008 N/m
- Damping at zero displacement 10,000 Ns/m
- Stiffness at radial clearance 1e + 008 N/m
- Damping at radial clearance 20,000 Ns/m
- Radial clearance 0.0001 m.
2.2.2. Model SOL2
2.2.3. Model SOL3
2.3. Experimental Setup
3. Results
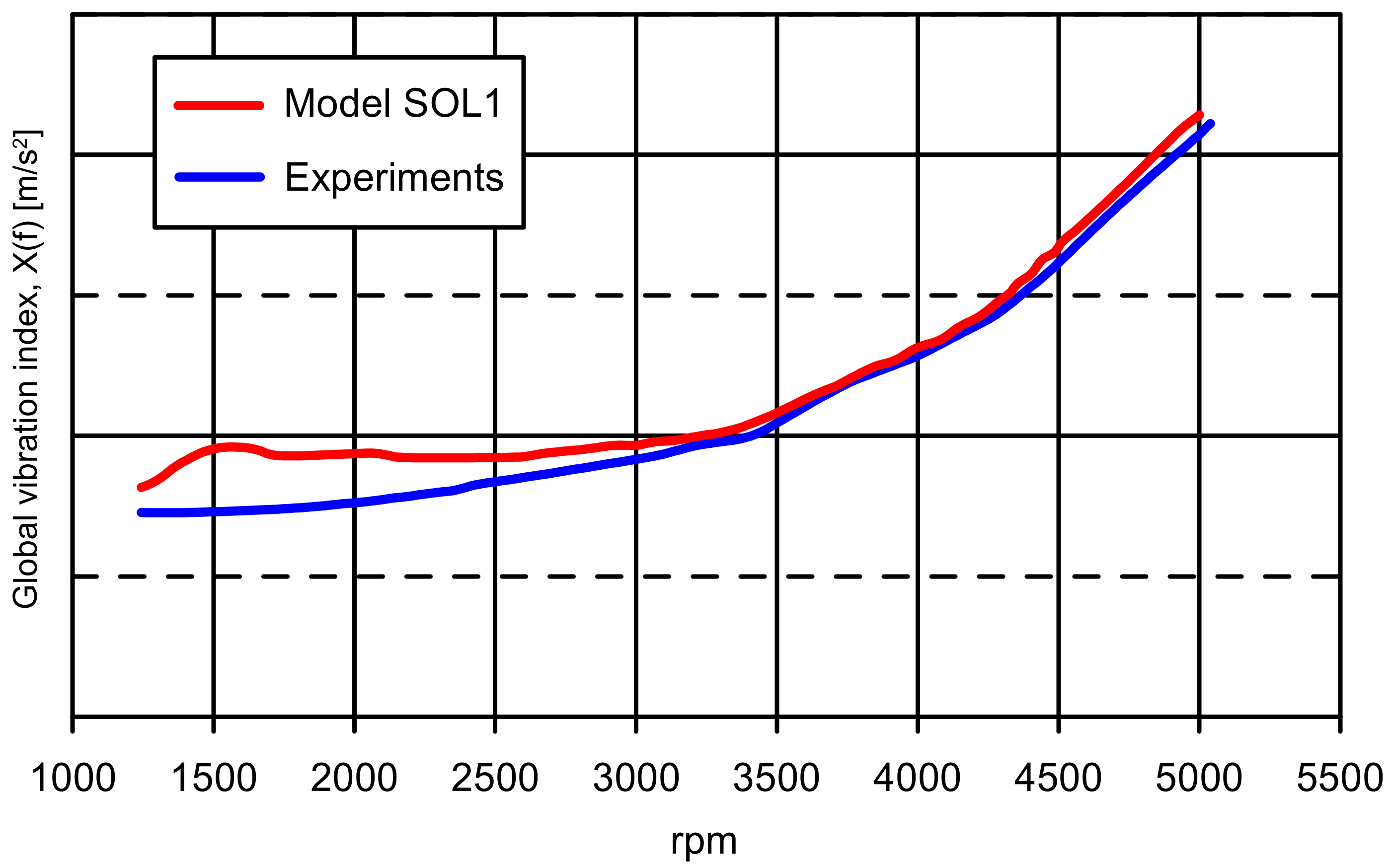
3.1. Model SOL1
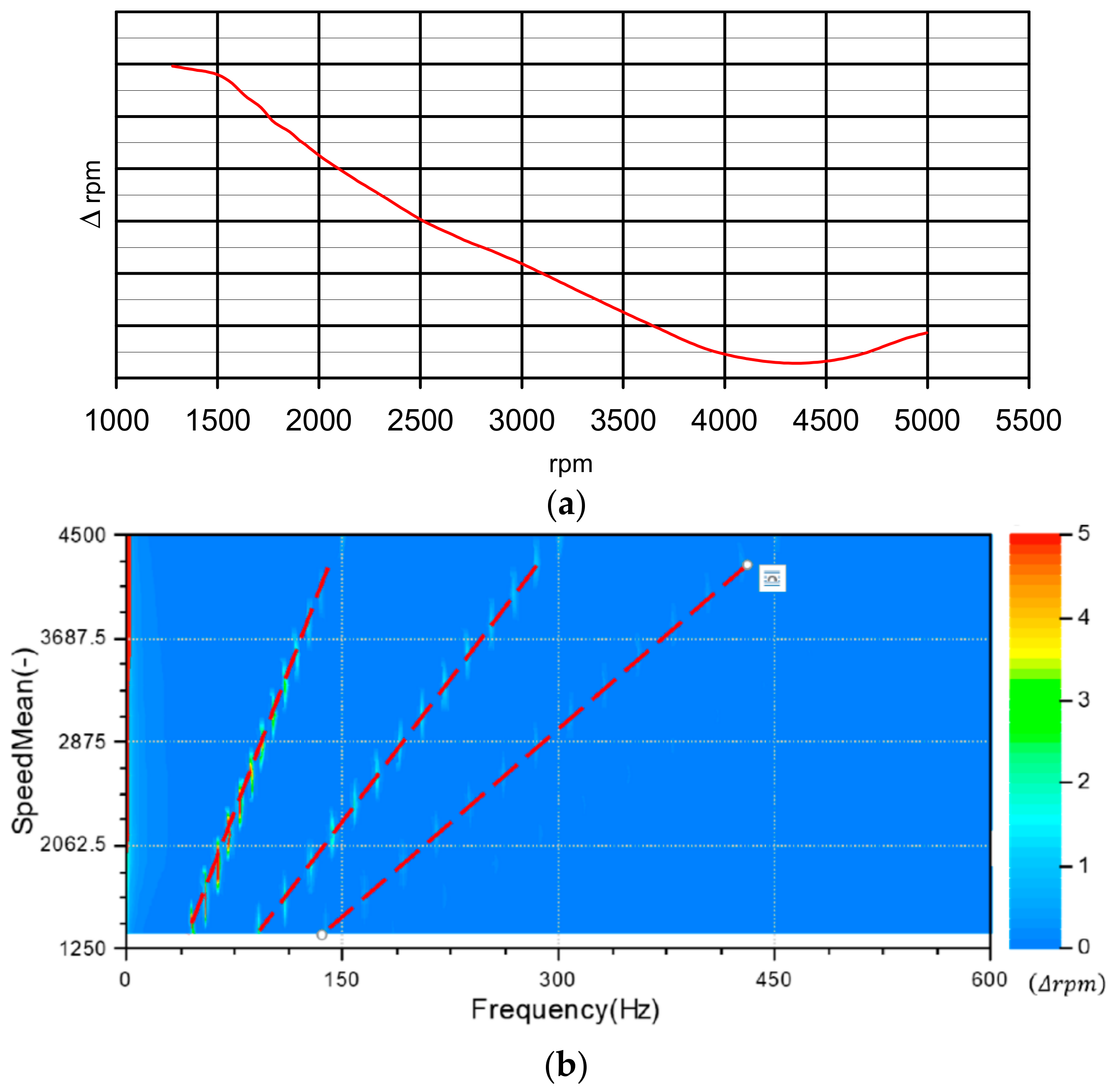
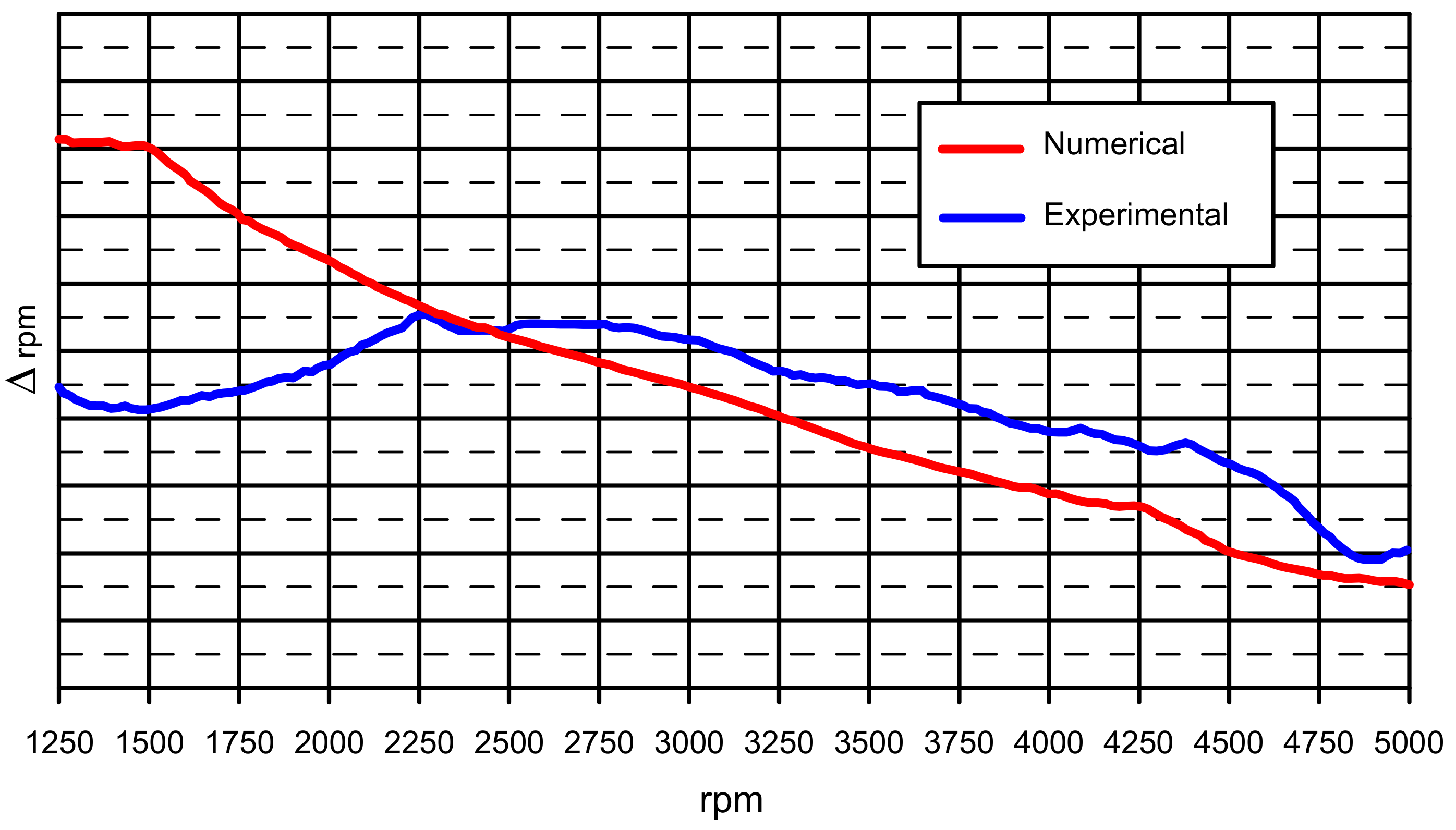
3.1.1. Motion Irregularities
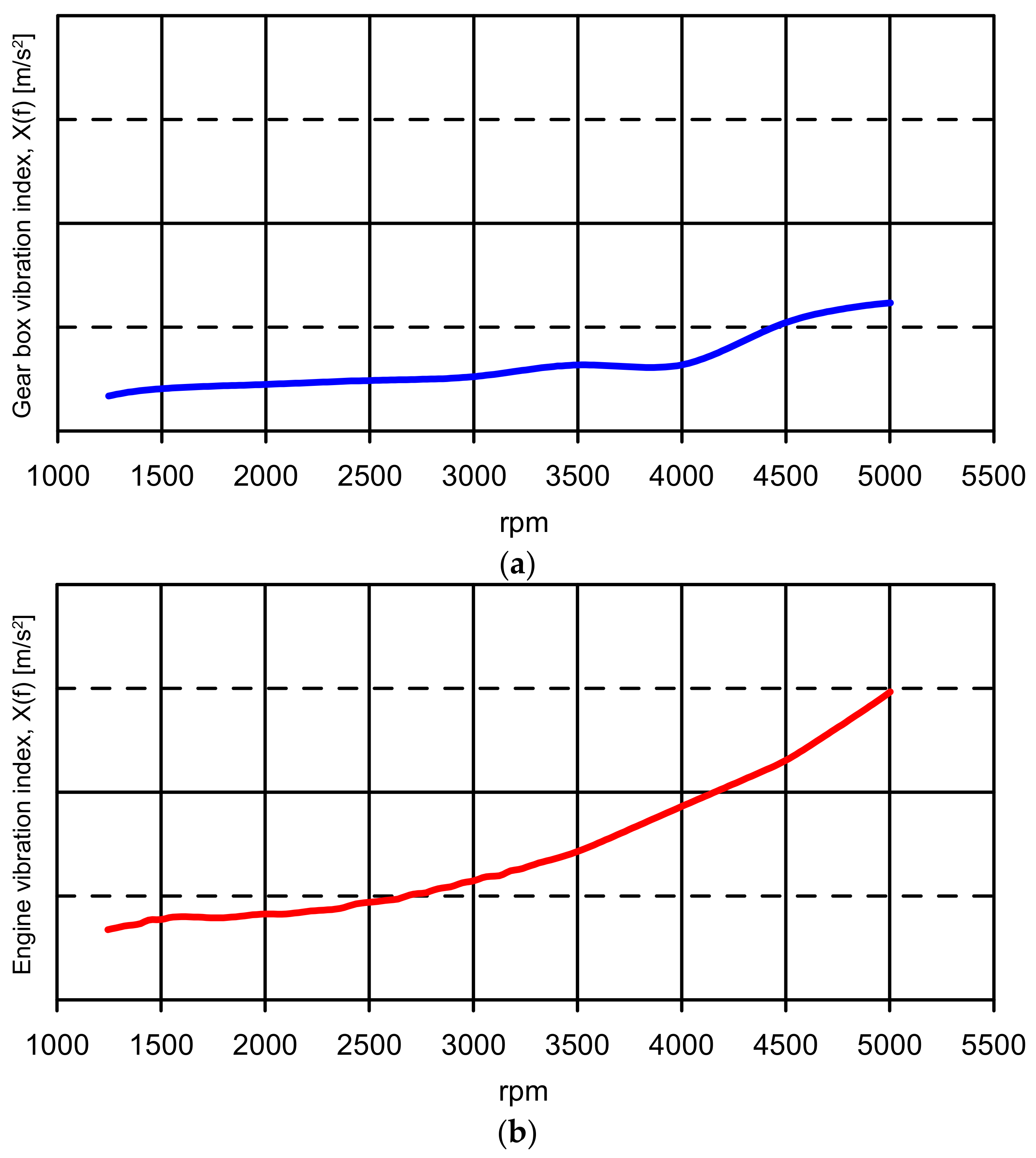
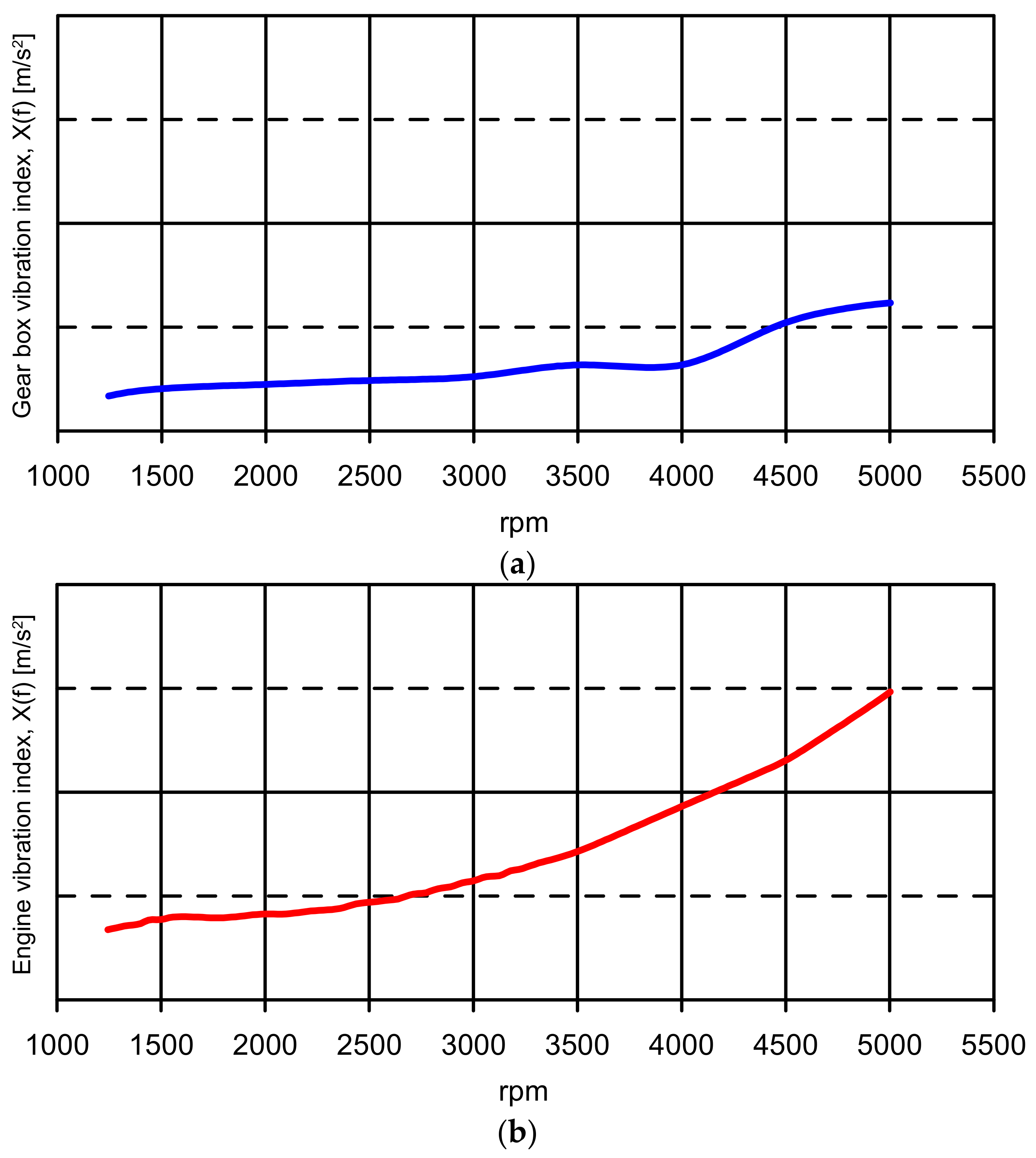
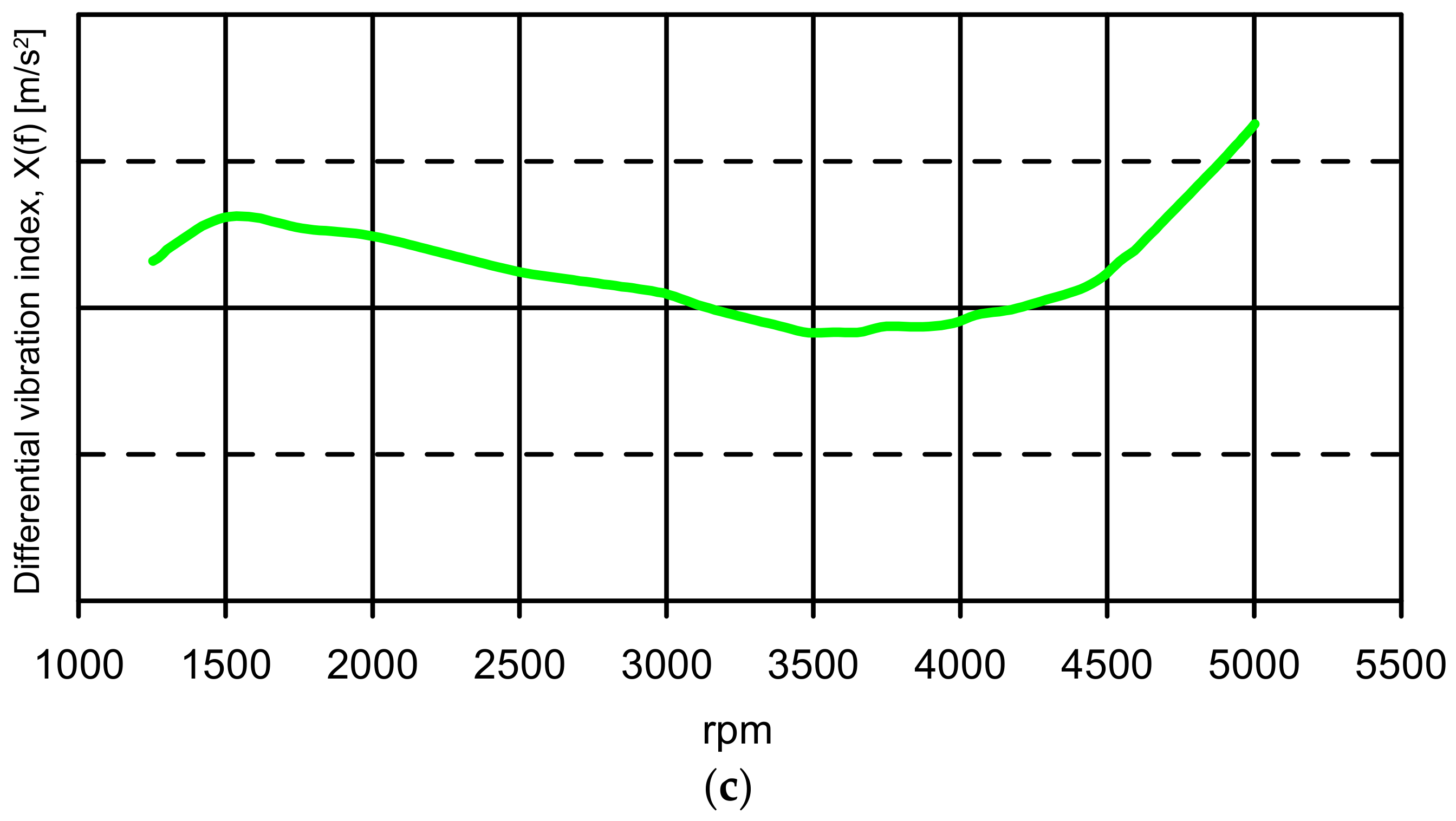
3.1.2. Global Vibration Index
- wi(f) is the weighting factor for a given direction and position,
- xi(f) is the rms acceleration for a given direction and position,
- n is the total number of positions and directions (x, y and z) = number of brackets × 3.
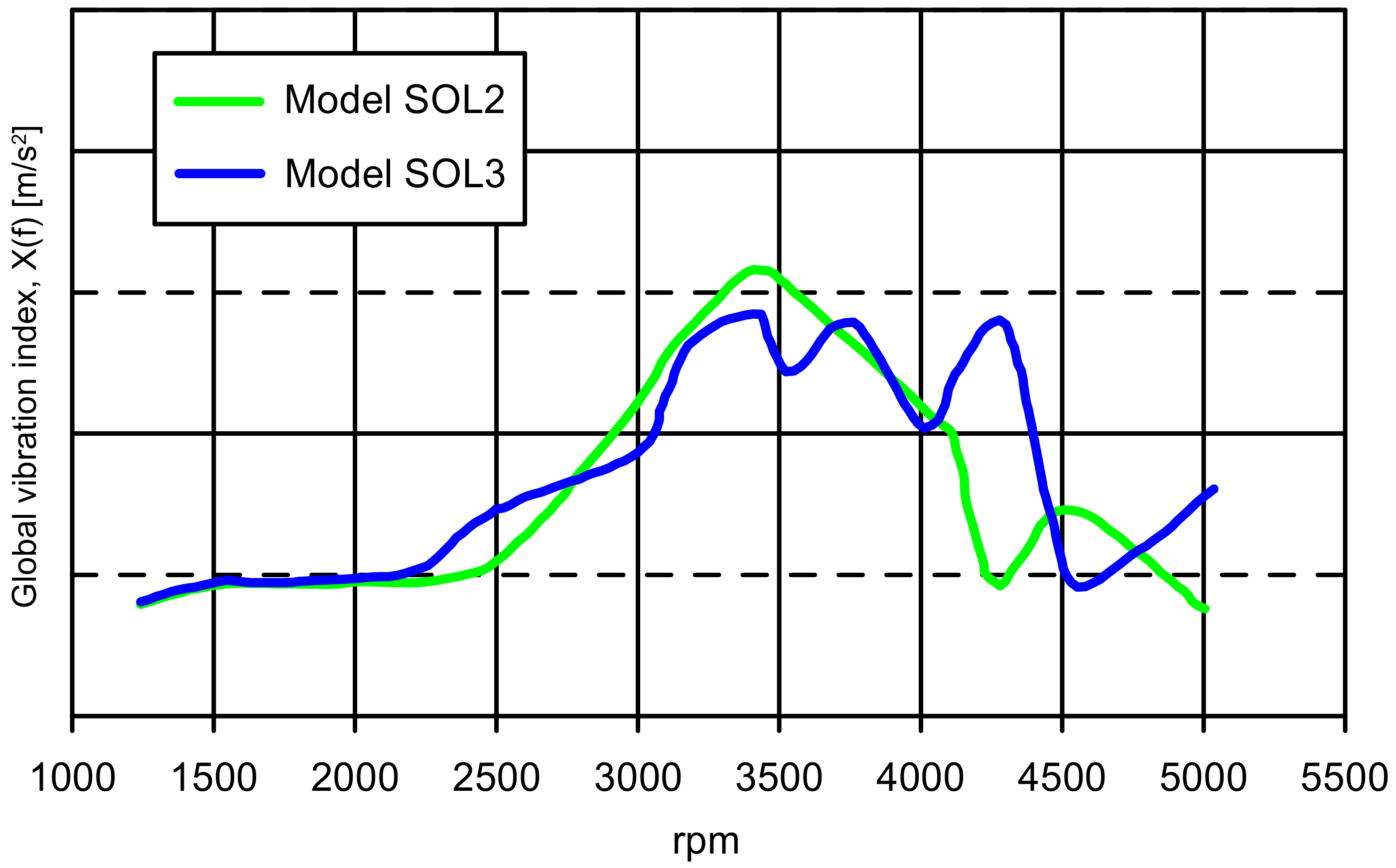
3.2. Model SOL2
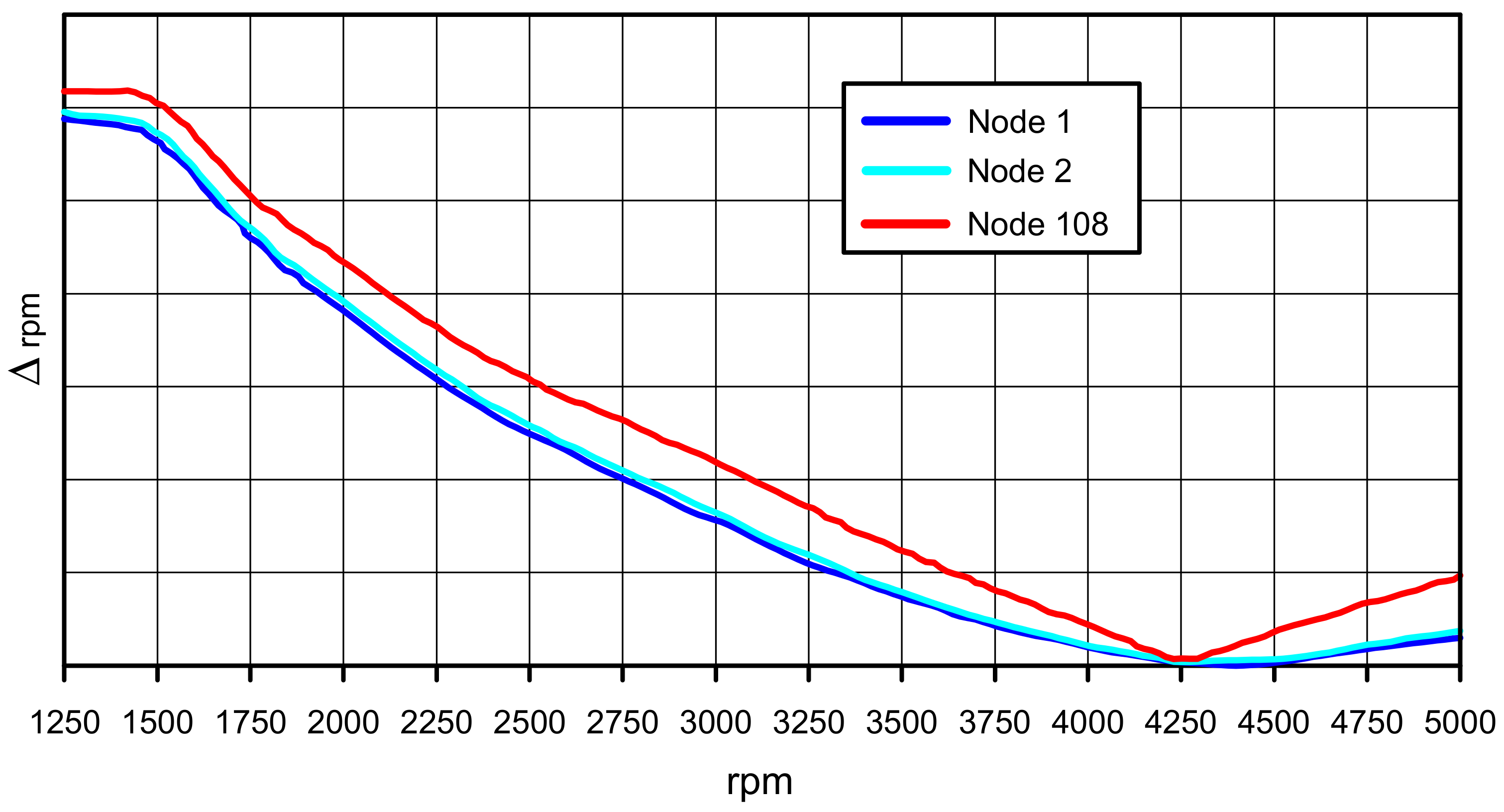
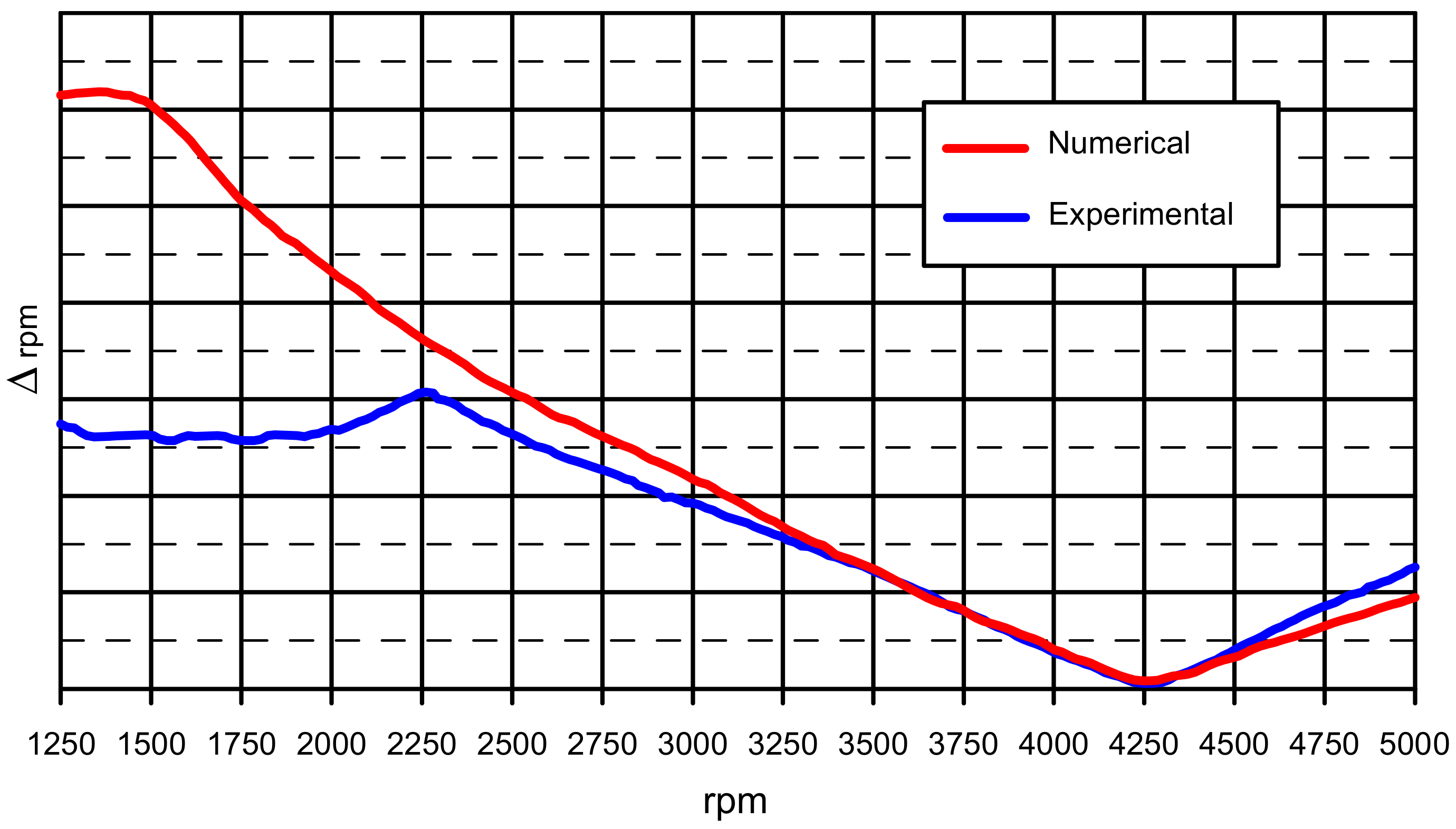
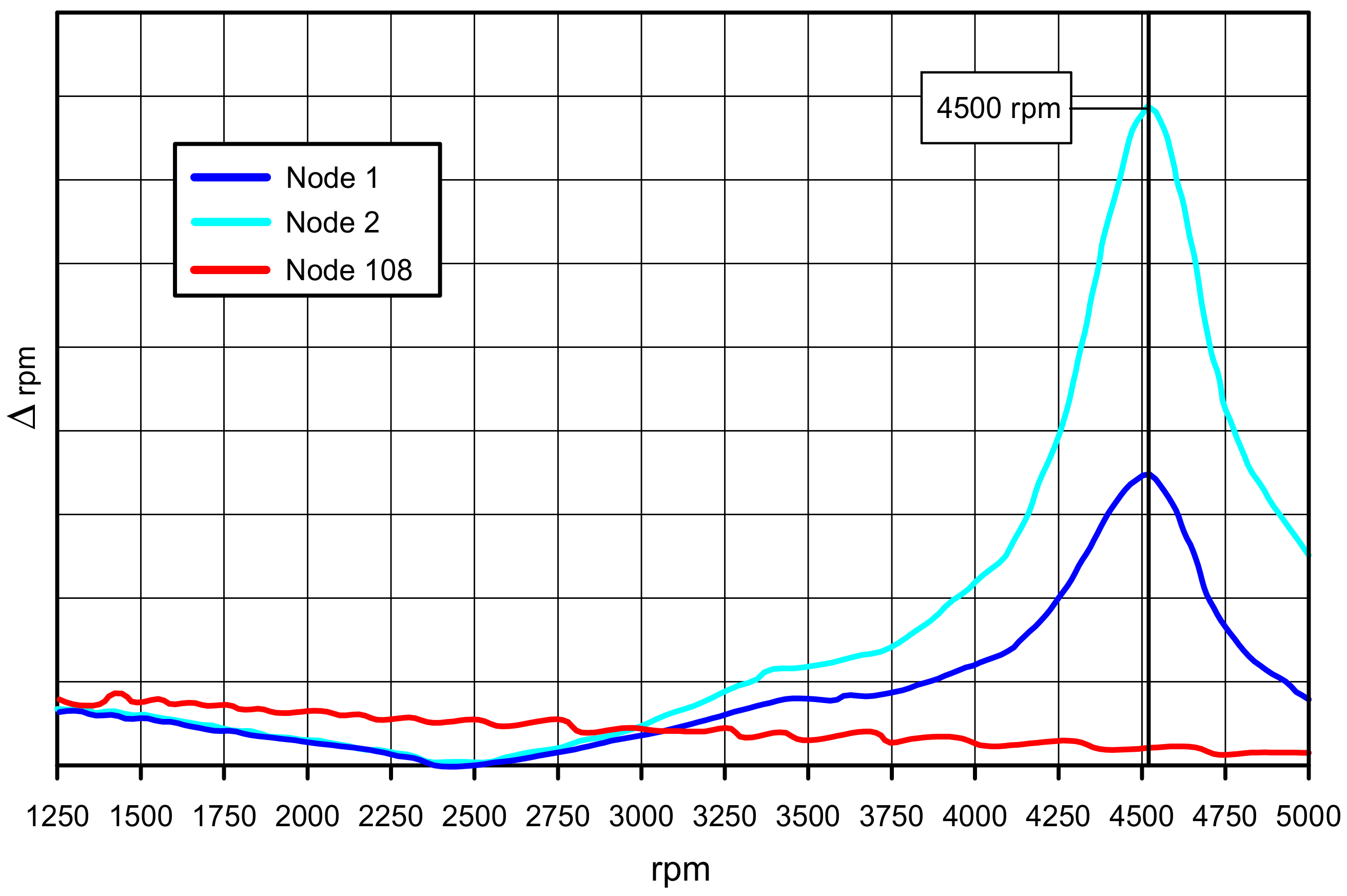
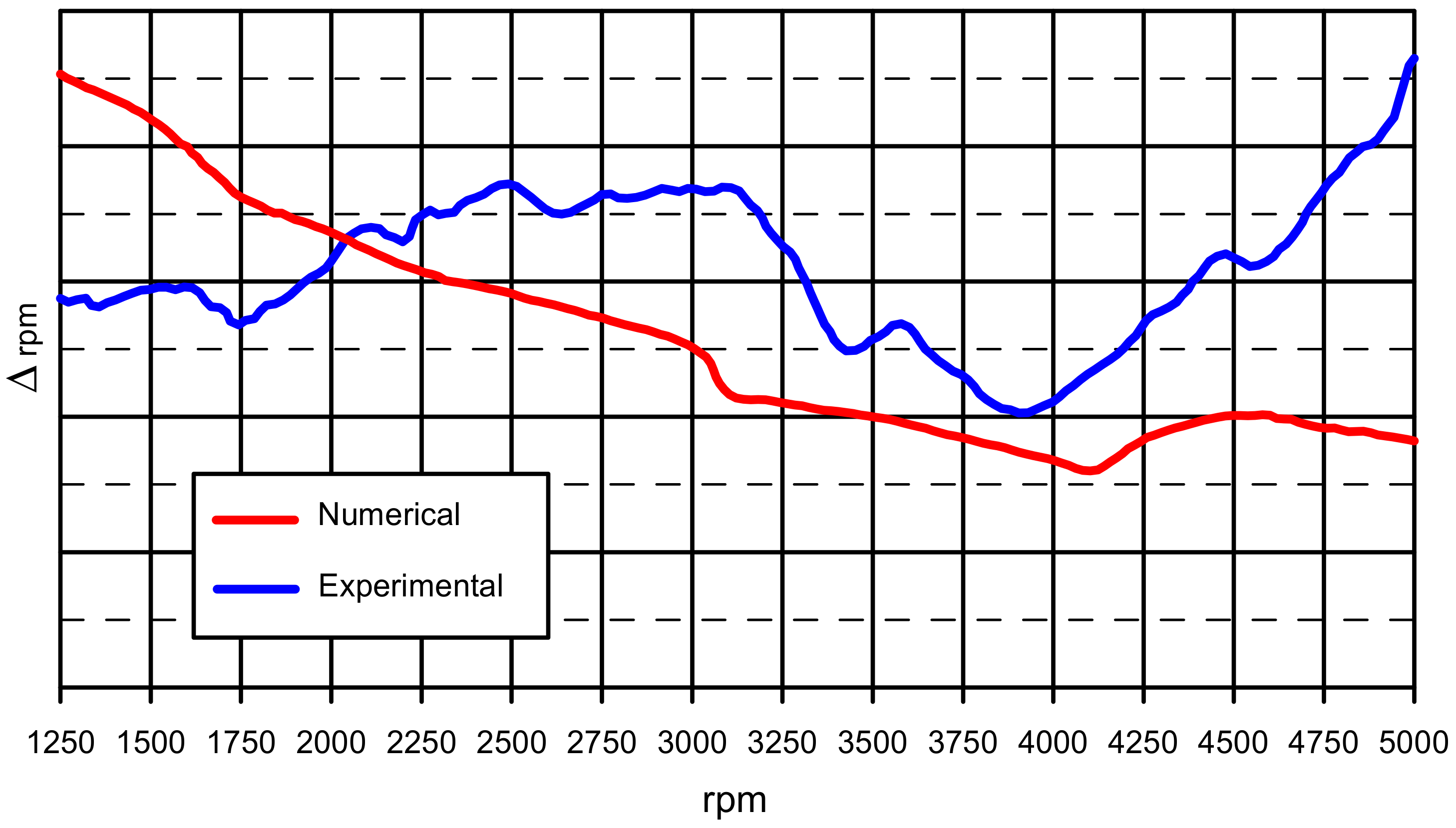
3.2.1. Motion Irregularities
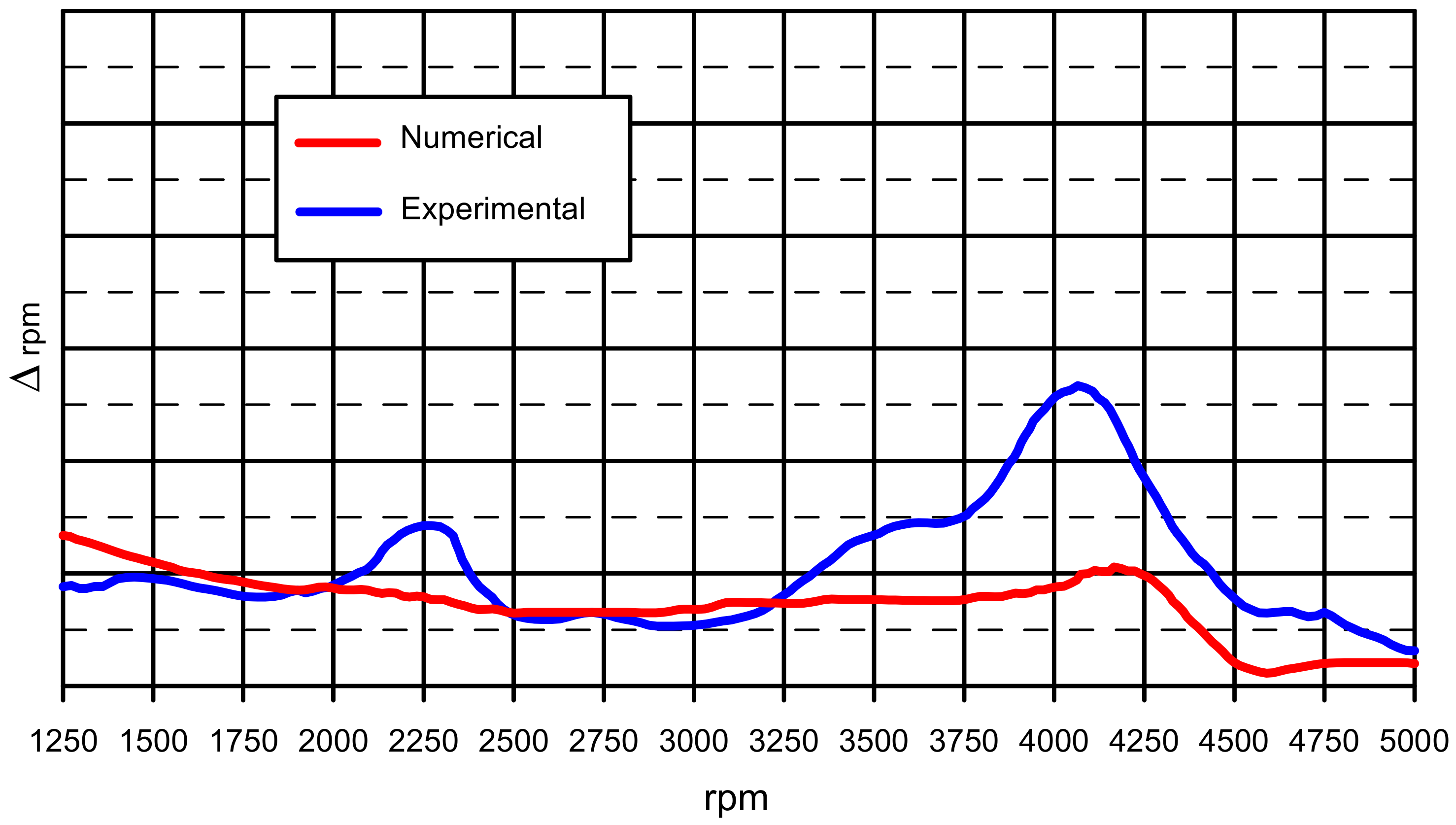
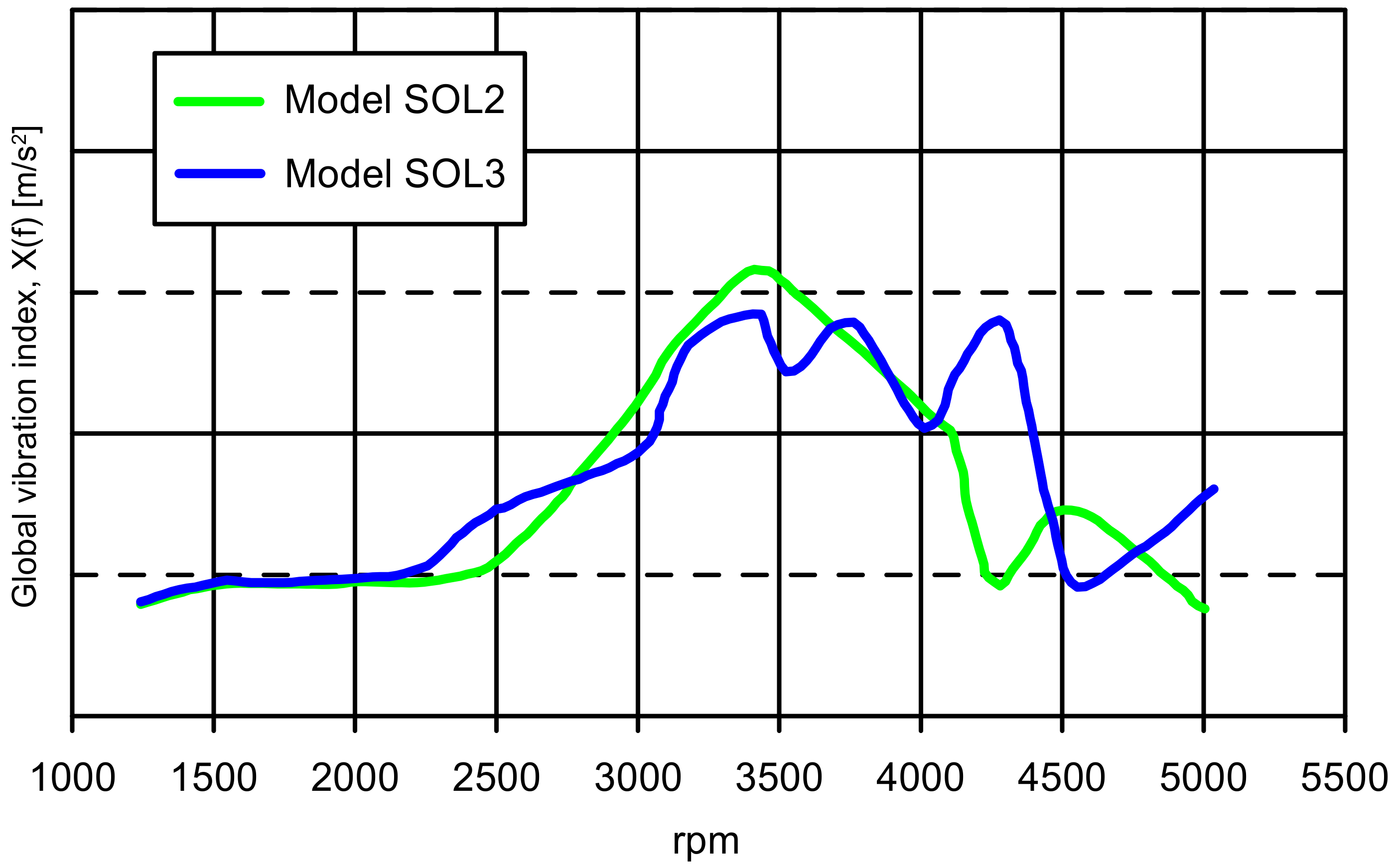
3.3. Model SOL3
4. Conclusions
- for what concerns the 2nd engine order motion irregularities and global vibration index, the rigid body model showed a good correlation with the experimental outcomes;
- the model with just the flexible shaft showed an adequate degree of correlation for the 2nd and 4th engine order motion irregularities; such a model represented the best compromise between the required computational effort and expected accuracy, also providing results that can be used for analyses requiring more in-depth study;
- the addition of explicit FE modeling for the clutch mechanism allowed us to improve the accuracy for the 4th engine order support brackets’ vibrations.
Author Contributions
Funding
Conflicts of Interest
References
- Citarella, R.; Federico, L. Advances in Vibroacoustics and Aeroacustics of Aerospace and Automotive Systems. Appl. Sci. 2018, 8, 366. [Google Scholar] [CrossRef]
- Bianco, D.; Adamo, F.P.; Barbarino, M.; Vitiello, P.; Bartoccini, D.; Federico, L.; Citarella, R. Integrated Aero–Vibroacoustics: The Design Verification Process of Vega-C Launcher. Appl. Sci. 2018, 8, 88. [Google Scholar] [CrossRef]
- Armentani, E.; Sbarbati, F.; Perrella, M.; Citarella, R. Dynamic analysis of a car engine valve train system. Int. J. Veh. Noise Vib. 2016, 12, 229–240. [Google Scholar] [CrossRef]
- Yakoub, R.Y.; Corrado, M.; Forcelli, A.; Pappalardo, T.; Dutre, S. Prediction of System-Level Gear Rattle Using Multibody and Vibro-Acoustic Techniques. SAE Tech. Pap. 2004. [Google Scholar] [CrossRef]
- Gérard, F.; Tournour, M.; El Masri, N.; Cremers, L.; Felice, M.; Selmane, A. Acoustic Transfer Vectors for Numerical Modeling of Engine Noise. Sound Vib. Mag. 2002, 36, 20–25. [Google Scholar]
- Citarella, R.; Federico, L.; Cicatiello, A. Modal acoustic transfer vector approach in a FEM–BEM vibro-acoustic analysis. Eng. Anal. Bound. Elem. 2007, 31, 248–258. [Google Scholar] [CrossRef]
- Gustafsson, M.; Jacqmot, J.; Caro, S. Experimental Validation of an Efficient Procedure for Large Acoustic Radiation Problems. In Proceedings of the ISMA2010 Including USD2010, Leuven, Belgium, 20–22 September 2010; pp. 4557–4566, ISBN 978-907380287-2. [Google Scholar]
- Armentani, E.; Sepe, R.; Parente, A.; Pirelli, M. Vibro-Acoustic Numerical Analysis for the Chain Cover of a Car Engine. Appl. Sci. 2017, 7, 610. [Google Scholar] [CrossRef]
- Hua, X.; Lim, T.C.; Peng, T.; Wali, W.E. Dynamic Analysis of Spiral Bevel Geared Rotor Systems Applying Finite Elements and Enhanced Lumped Parameters. Int. J. Automot. Technol. 2012, 13, 97–107. [Google Scholar] [CrossRef]
- Hua, X.; Lim, T.; Peng, T. Effect of Shaft-bearing Configurations on Spiral Bevel Gear Mesh and Dynamics. SAE Tech. Pap. 2011. [Google Scholar] [CrossRef]
- Xu, X.; Luo, T.; Luo, J.; Hua, X.; Langari, R. Dynamical load sharing behaviors of heavy load planetary gear system with multi-floating components. Int. J. Model. Simul. Sci. Comput. 2018, 9, 1850005. [Google Scholar] [CrossRef]
- Hanim, S.; Zouani, A.; Felice, M. Integrated dynamic engine simulation for automotive noise & vibration predictions. In Proceedings of the NAFEMS Americas Conference, Seattle, WA, USA, 7–9 June 2016. [Google Scholar]
- Östman, F.; Toivonen, H.T. Adaptive Cylinder Balancing of Internal Combustion Engines. IEEE Trans. Control Syst. Technol. 2011, 19, 782–791. [Google Scholar] [CrossRef]
- Giakoumis, E.G.; Rakopoulos, C.D.; Dimaratos, A.M. Study of crankshaft torsional deformation under steady-state and transient operation of turbocharged diesel engines. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2008, 222, 17–30. [Google Scholar] [CrossRef]
- Offner, G.; Priebsch, H. Elastic body contact simulation for predicting piston slap induced noise in an IC engine. In Multi-Body Dynamics: Monitoring and Simulation Techniques-II; Rahnejat, H., Ebrahimi, M., Whalley, R., Eds.; Professional Engineering Publishing: London, UK, 2000; pp. 191–206. ISBN 978-1-860-58258-5. [Google Scholar]
- Offner, G.; Krasser, J.; Laback, O.; Priebsch, H. Simulation of multi-body dynamics and elasto-hydrodynamic excitation in engines especially considering piston-liner contact. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2001, 215, 93–102. [Google Scholar] [CrossRef]
- Duvigneau, F.; Nitzschke, S.; Woschke, E.; Gabbert, U. A holistic approach for the vibration and acoustic analysis of combustion engines including hydrodynamic interactions. Arch. Appl. Mech. 2016, 86, 1887–1900. [Google Scholar] [CrossRef]
- Perera, M.S.; Theodossiades, S.; Rahnejat, H. Elasto-multi-body dynamics of internal combustion engines with tribological conjunctions. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2010, 224, 261–277. [Google Scholar] [CrossRef] [Green Version]
- Junhong, Z.; Jun, H. CAE process to simulate and optimise engine noise and vibration. Mech. Syst. Signal Process. 2006, 20, 1400–1409. [Google Scholar] [CrossRef]
- Gawande, S.H.; Navale, L.G.; Nandgaonkar, M.R.; Butala, D.S.; Kunamalla, S. Fault Detection of Inline Reciprocating Diesel Engine: A Mass and Gas-Torque Approach. Adv. Acoust. Vib. 2012, 1–6. [Google Scholar] [CrossRef]
- Siano, D.; Citarella, R. Elastic Multi Body Simulation of a Multi-Cylinder Engine. Open Mech. Eng. J. 2014, 8, 157–169. [Google Scholar] [CrossRef]
- Siano, D.; Citarella, R.; Armentani, E. Simulation of a multi-cylinder engine vibrational behavior. Int. J. Veh. Noise Vib. 2018, in press. [Google Scholar]
- Dassault Systems Simulia Corp. Abaqus Analysis User’s Manual; Version 6.12.1; Dassault Systems Simulia Corp.: Providence, RI, USA, 2011. [Google Scholar]
- AVL EXCITE Base Module Reference Manual.
- Kim, S.J.; Kim, S.G.; Oh, K.S.; Lee, S.K. Excitation Force Analysis of a Powertrain Based on CAE Technology. Int. J. Automot. Technol. 2008, 9, 703–711. [Google Scholar] [CrossRef]
- Shabana, A.A.; Ahmed, A. Theory of Vibration—An Introduction; Mechanical Engineering Series; Springer: New York, NY, USA, 1996; ISBN 978-1-4612-3976-5. [Google Scholar]
- Shabana, A.A.; Ahmed, A. Vibration of Discrete and Continuous Systems; Mechanical Engineering Series; Springer: New York, NY, USA, 1997; ISBN 978-1-4612-4036-5. [Google Scholar]
- Craig, R.; Bampton, M. Coupling of Substructures for Dynamic Analyses. AIAA J. 1968, 6, 1313–1319. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | AVL/Excite Elements Used for the Schematization | Modeled FE Elements | Purpose |
|---|---|---|---|
| SOL1 | crankshaft, connecting rod, power unit, generic body, revolute joint, axial thrust bearing, piston-liner guidance, table force/moment | - | Procedural—for the verification of the next steps |
| SOL2 | connecting rod, power unit, generic body, revolute joint, axial thrust bearing, piston-liner guidance, table force/moment | crankshaft, pulley, flywheel | analysis and comparison |
| SOL3 | connecting rod, power unit, generic body, revolute joint, axial thrust bearing, piston-liner guidance, table force/moment | crankshaft, pulley, flywheel, clutch mechanism | analysis and comparison |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Armentani, E.; Caputo, F.; Esposito, L.; Giannella, V.; Citarella, R. Multibody Simulation for the Vibration Analysis of a Turbocharged Diesel Engine. Appl. Sci. 2018, 8, 1192. https://doi.org/10.3390/app8071192
Armentani E, Caputo F, Esposito L, Giannella V, Citarella R. Multibody Simulation for the Vibration Analysis of a Turbocharged Diesel Engine. Applied Sciences. 2018; 8(7):1192. https://doi.org/10.3390/app8071192
Chicago/Turabian StyleArmentani, Enrico, Francesco Caputo, Luca Esposito, Venanzio Giannella, and Roberto Citarella. 2018. "Multibody Simulation for the Vibration Analysis of a Turbocharged Diesel Engine" Applied Sciences 8, no. 7: 1192. https://doi.org/10.3390/app8071192
APA StyleArmentani, E., Caputo, F., Esposito, L., Giannella, V., & Citarella, R. (2018). Multibody Simulation for the Vibration Analysis of a Turbocharged Diesel Engine. Applied Sciences, 8(7), 1192. https://doi.org/10.3390/app8071192