Event-Driven Sensor Deployment in an Underwater Environment Using a Distributed Hybrid Fish Swarm Optimization Algorithm


Abstract
:1. Introduction
2. Related Works
3. Preliminaries
3.1. Description of the Problem
3.2. Coverage Perception Model
3.3. Evaluation Standards
4. Node Deployment Scheme for UASNs Based on the DHFSOA
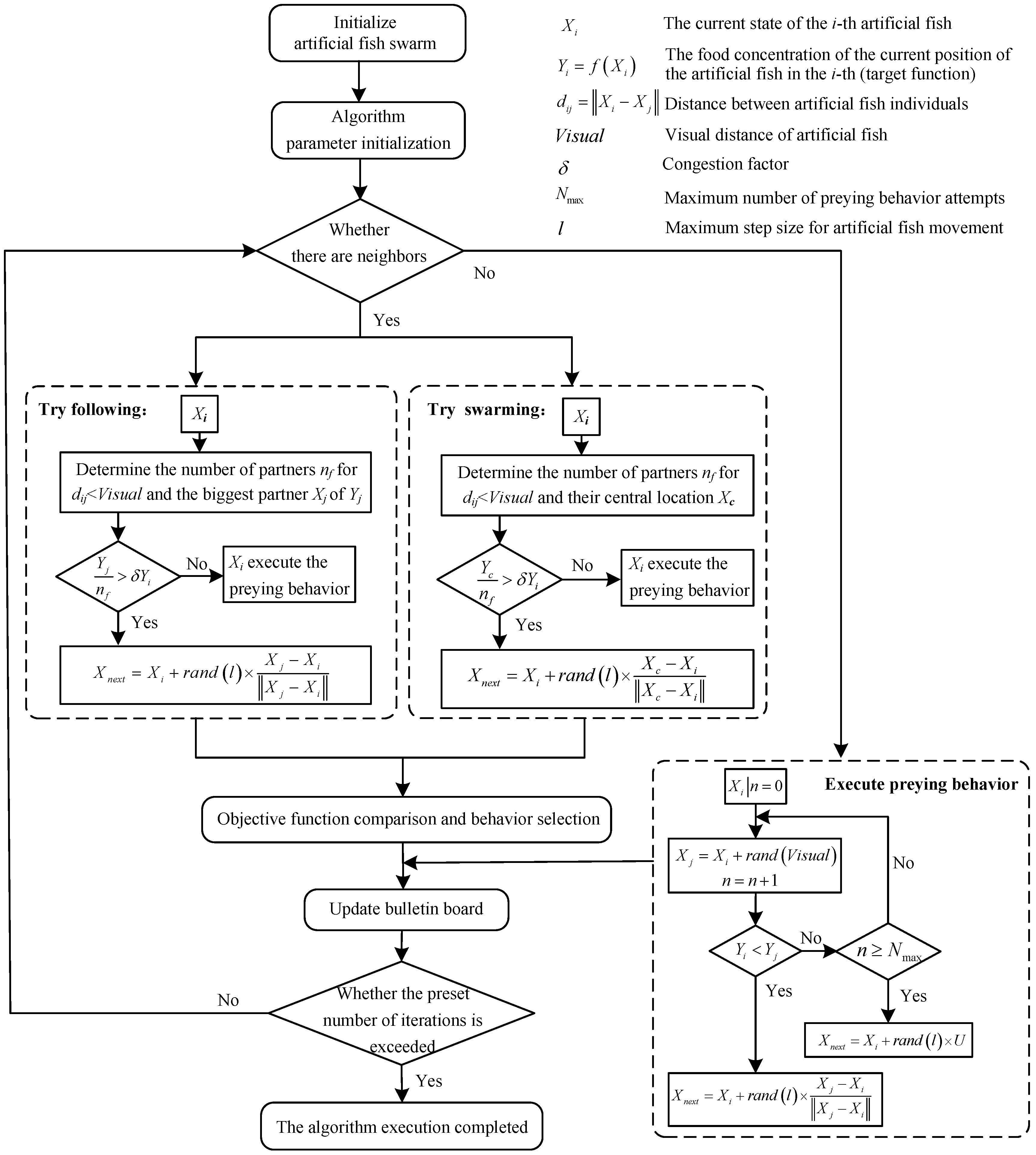
- (1)
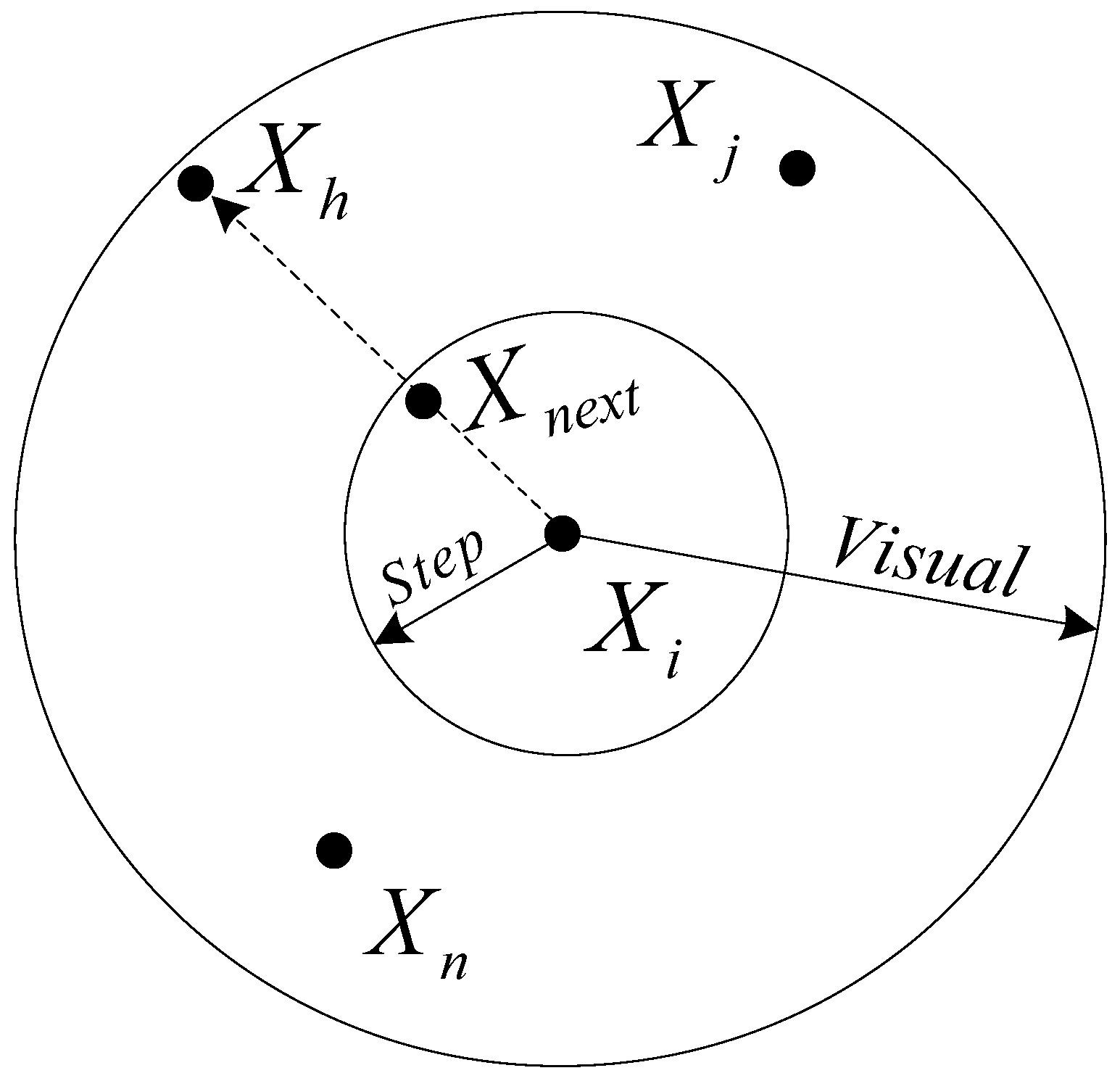
- Preying behavior: preying behavior consists of fish randomly swimming in search of food; let the current state of the artificial fish be , randomly select a state within its visual range. When the maximal value problem is obtained, if < , then go further in the direction, that is ; otherwise, re-randomly select the state , judging whether the forward condition is satisfied; after repeatedly trying times, if the forward condition is still not satisfied, the step is randomly moved.
- (2)
- Following behavior: following behavior occurs when a fish finds a location with abundant food and other fish quickly follow; suppose the current state of the artificial fish is , the number of partners in the current neighborhood () is , and the partner with the highest food concentration among the () partners is (food concentration is ), if , indicating that the state of partner has a higher food concentration and it is not too crowded around, then goes further in the direction of ; otherwise, the preying behavior is performed.
- (3)
- Swarming behavior: swarming behavior is the tendency for fish to naturally gather in groups while swimming. Set the number of partners in the current neighborhood () to be , and the central position status to be . if , indicating that the partner center has more food and the surrounding area is less crowded, moving further toward the partner center position ; otherwise, the preying behavior is performed.
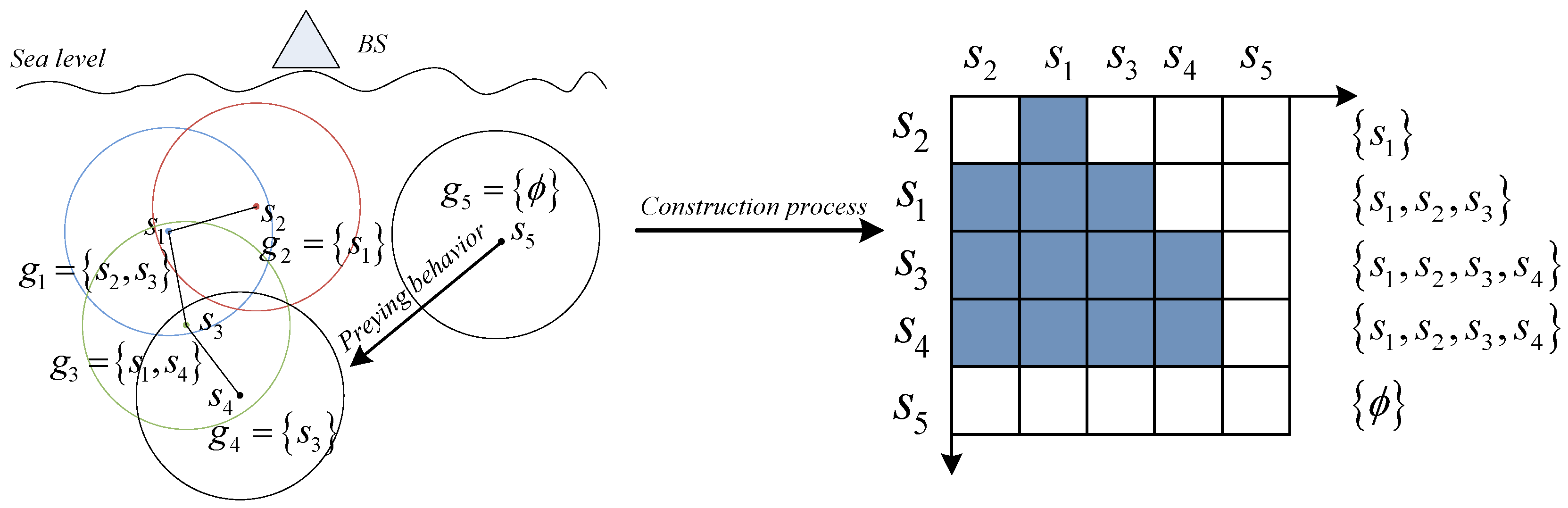
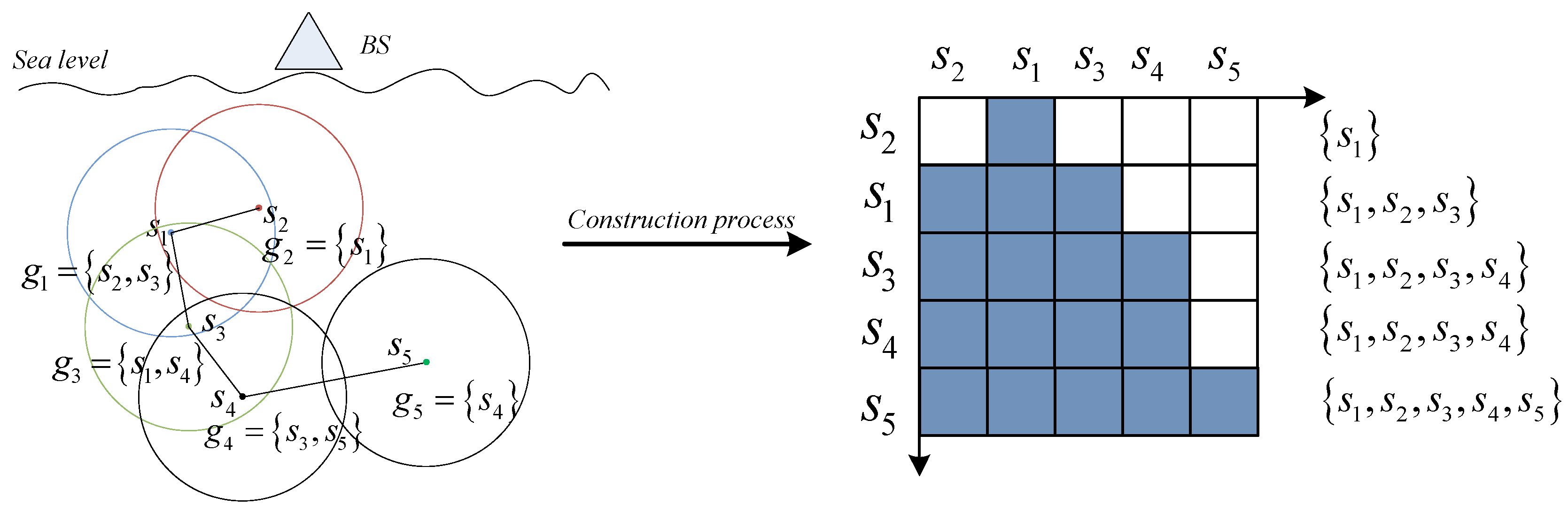
4.1. Construction of the Information Pool
| Algorithm 1: Construction of the Information Pool (Output Set ). |
|
4.2. Description of Artificial Fish Behaviors
- (1)
- Following behavior: Set the number of partners in the visible domain (radius of communication being ) of node as , and information pool built with the partners as , and determine the optimal node in ,If node finds more events covered at and is less crowded, i.e., and , then move one step toward the position of partner :where and represent position vectors of and respectively, and l is the value of the moving step.
- (2)
- Preying behavior: Set the number of partners in the visible domain (radius of communication being ) of node as , , which indicates that node is in an isolated state. l is the maximum value of the moving step. Set the current position of node as , and randomly move to the new position within its maximum moving step l:where represents the random value between 0 to l. If increases, the preying behavior is successful; if the preying fails, then it randomly reselects a new position. After repeating this process times (In general, the value of is small, mainly based on our practical experience and repeated experiments [23].), if still cannot be increased, then randomly move forward one step:where U is an arbitrary unit vector, and represents a random number between and l.
4.3. Description of the DHFSOA
| Algorithm 2: DHFSOA Description |
|
5. Performance Analysis
5.1. Static Environment Sensor Deployment
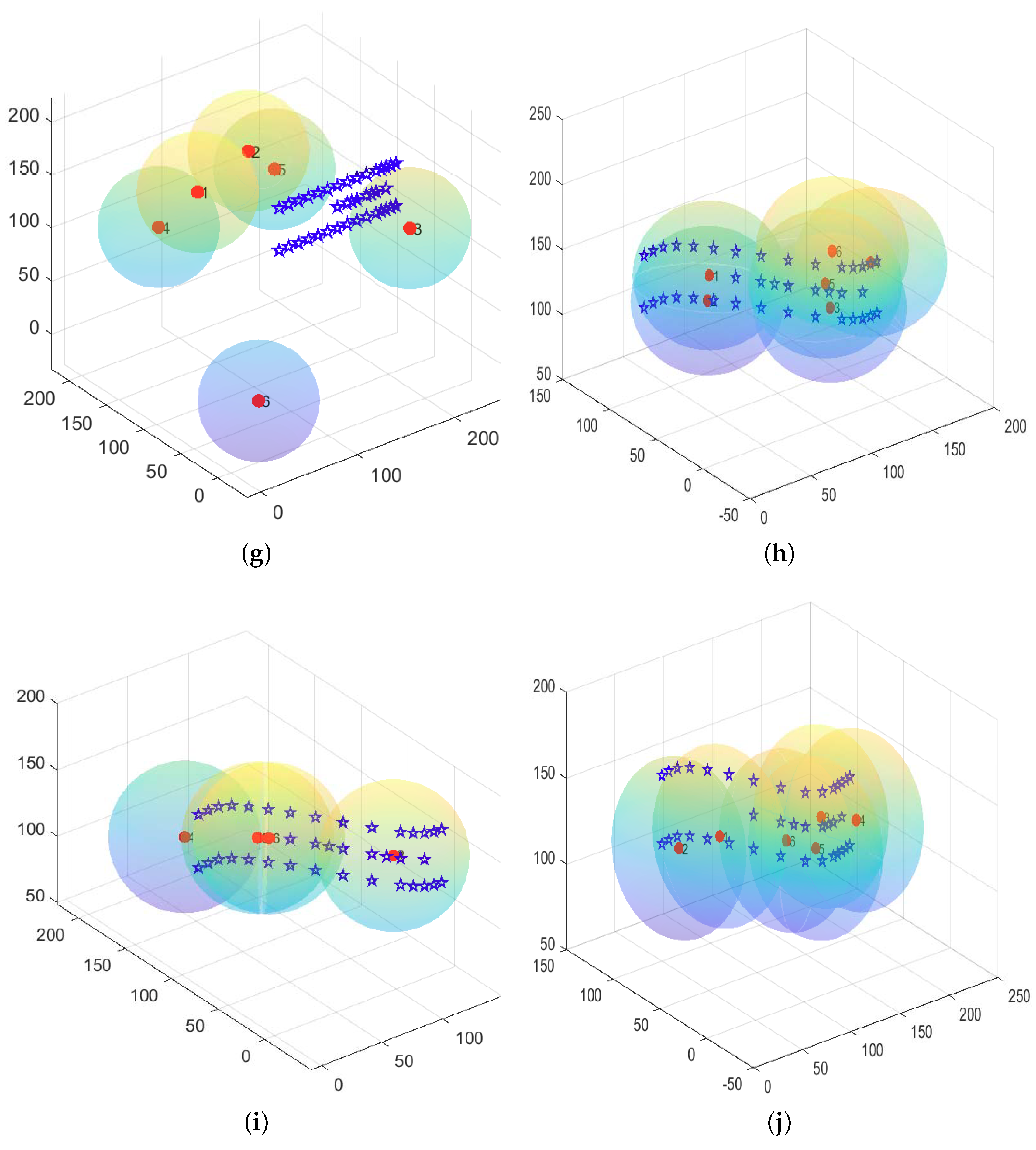
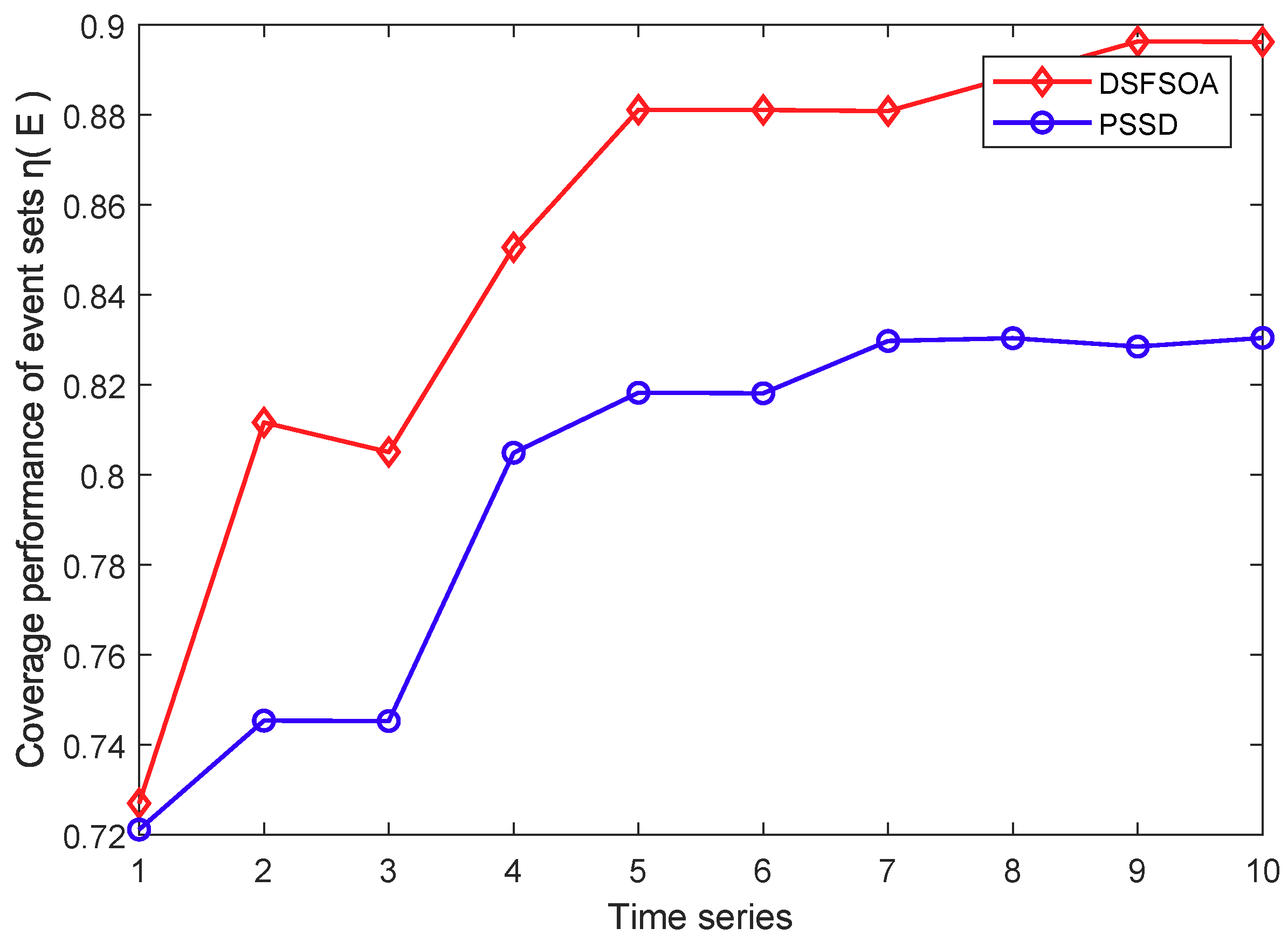
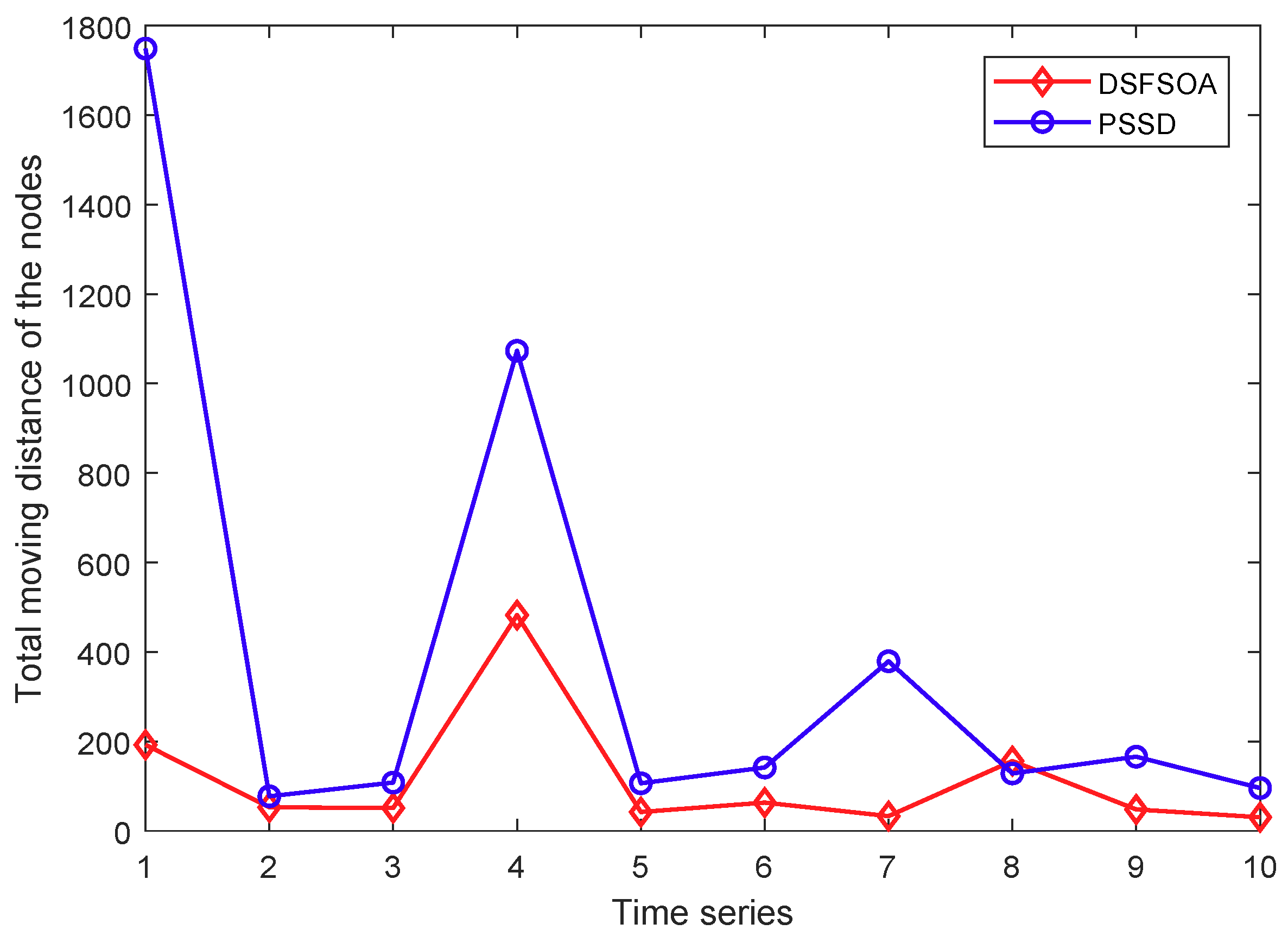
5.2. Sensor Deployment in a Dynamic Environment
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Chen, K.; Ma, M.; Cheng, E.; Yuan, F.; Su, W. A survey on MAC protocols for underwater wireless sensor networks. IEEE Commun. Surv. Tutor. 2014, 16, 1433–1447. [Google Scholar] [CrossRef]
- Davis, A.; Chang, H. Underwater wireless sensor networks. In Proceedings of the IEEE Oceans 2012, Hampton Road, VA, USA, 14–19 October 2012; pp. 1–5. [Google Scholar]
- Berger, C.R.; Zhou, S.L.; Willett, P.; Liu, L.B. Stratification Effect Compensation for Improved Underwater Acoustic Ranging. IEEE Trans. Signal Process. 2008, 56, 3779–3783. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Lin, H.; Jiang, H. CANS: A Congestion-Adaptive WSN-Assisted Emergency Navigation Algorithm with Small Stretch. IEEE Trans. Mob. Comput. 2016, 15, 1077–1089. [Google Scholar] [CrossRef]
- Wang, H.; Li, Y.; Chang, T.; Chang, S. An Effective Scheduling Algorithm for Coverage Control in Underwater Acoustic Sensor Network. Sensors 2018, 18, 2512. [Google Scholar] [CrossRef] [PubMed]
- Ian, F. Wireless sensor networks in challenged environments such as underwater and underground. In Proceedings of the 17th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, New York, NY, USA, 21–26 September 2014; pp. 1–2. [Google Scholar]
- Yang, X.; Miao, P.; Gibson, J.; Xie, G.G.; Du, D.Z.; Vasilakos, A.V. Tight performance bounds of multihop fair access for MAC protocols in wireless sensor networks and underwater sensor networks. IEEE Mob. Comput. 2011, 11, 1538–1554. [Google Scholar]
- Luo, X.; Feng, L.; Yan, J.; Guan, X. Dynamic Coverage with Wireless Sensor and Actor Networks in Underwater Environment. IEEE/CAA J. Autom. Sin. 2015, 2, 274–281. [Google Scholar]
- Liu, L.F. A deployment algorithm for underwater sensor networks in ocean environment. J. Circuits Syst. Comput. 2011, 20, 1051–1066. [Google Scholar] [CrossRef]
- Abo-Zahhad, M.; Ahmed, S.M.; Sabor, N.; Sasaki, S. Rearrangement of mobile wireless sensor nodes for coverage maximization based on immune node deployment algorithm. Comput. Electr. Eng. 2015, 43, 76–89. [Google Scholar] [CrossRef]
- Hua, C.B.; Wei, Z.; Nan, C.Z. Underwater Acoustic Sensor Networks Deployment Using Improved Self-Organize Map Algorithm. Cybern. Inf. Technol. 2014, 14, 63–77. [Google Scholar] [CrossRef] [Green Version]
- Bonabeau, E.; Dorigo, M.; Theraulaz, G. Swarm Intelligence: From Natural to Artificial Systems; Oxford University Press, Inc.: New York, NY, USA, 1999. [Google Scholar]
- Liu, X. Sensor deployment of wireless sensor networks based on ant colony optimization with three classes of ant transitions. IEEE Trans. Commun. Lett. 2012, 16, 1604–1607. [Google Scholar] [CrossRef]
- Wang, H.B.; Fan, C.C.; Tu, X.Y. AFSAOCP: A novel artificial fish swarm optimization algorithm aided by ocean current power. Appl. Intell. 2016, 45, 1–16. [Google Scholar] [CrossRef]
- Iyer, S.; Rao, D.V. Genetic algorithm based optimization technique for underwater sensor network positioning and deployment. In Proceedings of the 2015 IEEE Underwater Technology (UT), Chennai, India, 23–25 February 2015; pp. 1–6. [Google Scholar]
- Wang, Y.; Liao, H.; Hu, H. Wireless Sensor Network Deployment Using an Optimized Artificial Fish Swarm Algorithm. In Proceedings of the International Conference on Computer Science and Electronics Engineering, Hangzhou, China, 23–25 March 2012; pp. 90–94. [Google Scholar]
- Dhillon, S.S.; Chakrabarty, K. Sensor placement for effective coverage and surveillance in distributed sensor networks. In Proceedings of the Wireless Communications and Networking, New Orleans, LA, USA, 16–20 March 2003; pp. 1609–1614. [Google Scholar]
- Du, H.; Na, X.; Rong, Z. Particle Swarm Inspired Underwater Sensor Self-Deployment. Sensors 2014, 14, 15262–15281. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Das, S.; Liu, H.; Nayak, A. A localized algorithm for bi-connectivity of connected mobile robots. Telecommun. Syst. 2009, 40, 129–140. [Google Scholar] [CrossRef]
- Zhang, H.H.; Hou, J.C. Maintaining Sensing Coverage and Connectivity in Large Sensor Networks. Ad Hoc Sens. Wirel. Netw. 2005, 1, 89–124. [Google Scholar]
- Ghosh, A.; Das, S.K. Coverage and connectivity issues in wireless sensor networks: A survey. Pervasive Mob. Comput. 2008, 4, 303–334. [Google Scholar] [CrossRef]
- Neshat, M.; Sepidnam, G.; Sargolzaei, M.; Toosi, A.N. Artificial fish swarm algorithm: A survey of the state-of-the-art, hybridization, combinatorial and indicative applications. Artif. Intell. Rev. 2014, 42, 965–997. [Google Scholar] [CrossRef]
- Caruso, A.; Paparella, F.; Vieira, L.F.M.; Erol, M.; Gerla, M. The Meandering Current Mobility Model and its Impact on Underwater Mobile Sensor Networks. In Proceedings of the IEEE INFOCOM 2008, Phoenix, AZ, USA, 13–18 April 2008; pp. 771–775. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Node’s radius of perception | 50 m | Maximum number of iterations | 50 |
| Node’s radius of communication | 100 m | Constant | 5 |
| Length of moving step l | 15 m | Constant | 0.1 |
| Parameter | The Water Flow Field | Target Number | |||||
|---|---|---|---|---|---|---|---|
| k | c | Sensors | Events | ||||
| Value | 0.12 | 1.2 | 0.3 | 0.4 | 6 | 40 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Li, Y.; Chang, T.; Chang, S.; Fan, Y. Event-Driven Sensor Deployment in an Underwater Environment Using a Distributed Hybrid Fish Swarm Optimization Algorithm. Appl. Sci. 2018, 8, 1638. https://doi.org/10.3390/app8091638
Wang H, Li Y, Chang T, Chang S, Fan Y. Event-Driven Sensor Deployment in an Underwater Environment Using a Distributed Hybrid Fish Swarm Optimization Algorithm. Applied Sciences. 2018; 8(9):1638. https://doi.org/10.3390/app8091638
Chicago/Turabian StyleWang, Hui, Youming Li, Tingcheng Chang, Shengming Chang, and Yexian Fan. 2018. "Event-Driven Sensor Deployment in an Underwater Environment Using a Distributed Hybrid Fish Swarm Optimization Algorithm" Applied Sciences 8, no. 9: 1638. https://doi.org/10.3390/app8091638
APA StyleWang, H., Li, Y., Chang, T., Chang, S., & Fan, Y. (2018). Event-Driven Sensor Deployment in an Underwater Environment Using a Distributed Hybrid Fish Swarm Optimization Algorithm. Applied Sciences, 8(9), 1638. https://doi.org/10.3390/app8091638