Service-Oriented Cooperation Policies for Intelligent Ground Vehicles Approaching Intersections

 , ,
, ,
Abstract
1. Introduction
- How to guarantee the traveling efficiency of emergent vehicles, as well as the traditional traffic safety and throughput?
- How to manage vehicular behaviors synergistically in the complicated spatial-temporal serviced domain?
- What novel cooperative policies will satisfy vehicular service properties?
- How to verify new service-oriented features and designs in large-scale C-ITS environments?
2. Related Work and Literature
2.1. Autonomous Driving Study
2.2. Communication Based Cooperation at Intersections
2.3. Simulation and Verification
3. Fundamental Traffic Models and Cooperation Procedure
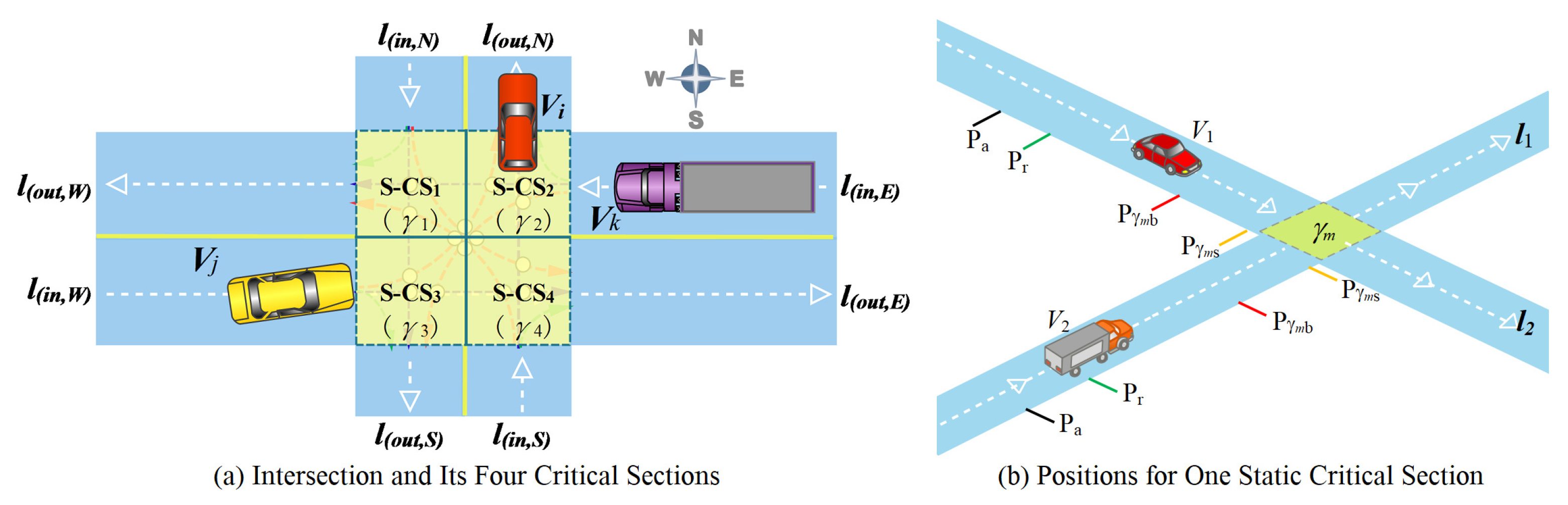
3.1. Fundamental Traffic Environment Objects
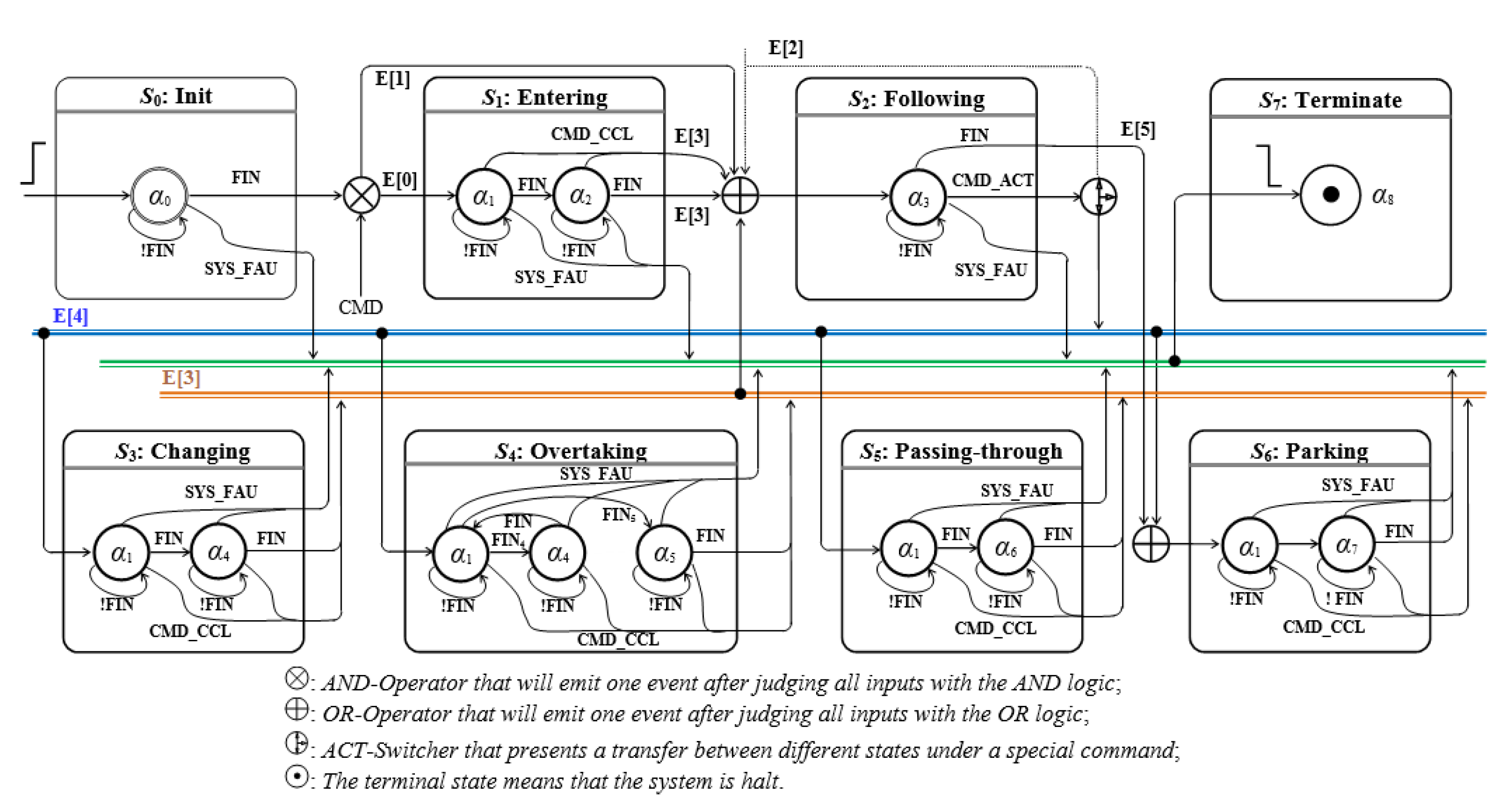
3.2. Modeling Heterogeneous Intelligent Vehicles and Their Behaviors
3.3. Centralized Scheduler: -Agent
3.4. The Unified Reservation-Based Passing-Through Procedure: RAAL
4. Design of Cooperation Policies and Algorithms
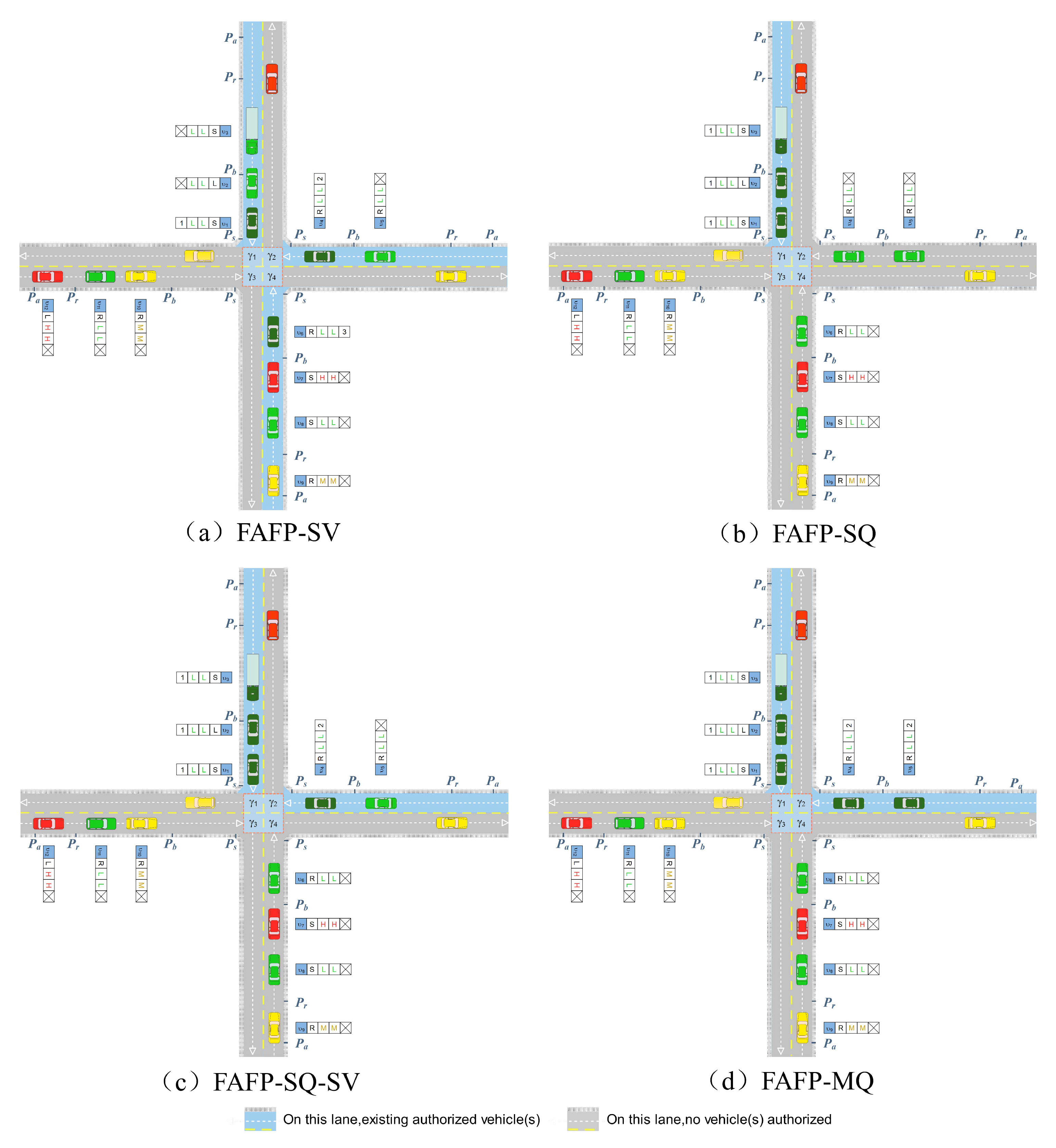
4.1. Typical Priority-Related Single-Vehicle Policies
| ALGORITHM 1: Arrival Time-based Authorization Mechanism with FAFP policy |
| Input: ; . Output: Vehicles to be authorized. Set all to be 0; ; = 1; while do if (There exists at least one that is not empty) then points to the wait-authorization element of which is the minimum in all ; if (); then //authorization logic; ; while () and () do Authorize to vehicle whose is ; ++; ++; end if (); then Delete authorized tuples from ; end end end end |
| ALGORITHM 2: GPI-based Authorization Mechanism with HQEP policy |
| Input: ; . Output: Vehicles to be authorized. Set all to be 0; ; = 1; while do if (There exists at least one that is not empty); then points to the first wait-authorization element of which is the highest in all ; if (); then Manage priorities of vehicles, on , at the front of with GPI mechanism; Authorize headmost vehicles that will not block vehicle with FAFP policy; Authorize the first vehicle with highest priority in all via authorization logic in Algorithm 1; else Authorize headmost vehicles that will not block vehicle with FAFP policy; end end end |
4.2. Enhanced Policies with Parallel Characteristics
| ALGORITHM 3: Authorization Mechanism with PAP |
| Input: ; ; N (The length of Platoon). Output: Vehicles to be authorized. Set all to be 0; while do if (There exists at least one that is not empty); then Choose one lane queue with to one previous policy, such as FAFP, HQEP, and HWFP; if (There exists at least one vehicle(H) in ); then if (The last vehicle(H) in is covered in the first N vehicles of this queue); then Choose at most N vehicles in to form a platoon; else Choose vehicles from the first to the last vehicle(H) in to form a platoon; //The real authorization amount will be greater than N; end else Choose at most N vehicles in to form a platoon; end if (The first several are available) and (No deadlock); then Authorize these tokens to this platoon; The value of every equals to the amount of vehicles it was authorized to; end end end |
| ALGORITHM 4: Authorization Mechanism with MLAP |
| Input: ; ; N (The length of Platoon). Output: Vehicles to be authorized. Set all to be 0; while do if ((There exists at least one that is not empty) and (All tokens are available)); then Choose one lane queue with to one previous policy, such as FAFP, HQEP, and HWFP; if (); then Authorize tokens to the first vehicle on ; else Authorize tokens to a platoon on , according to PAP; end while (Left available tokens cover all those are reserved by first several vehicles on some other lanes) do Choose vehicles to authorize with these available tokens; end end end |
4.3. Composite Policies: Taking Advantages of Different Ones Above
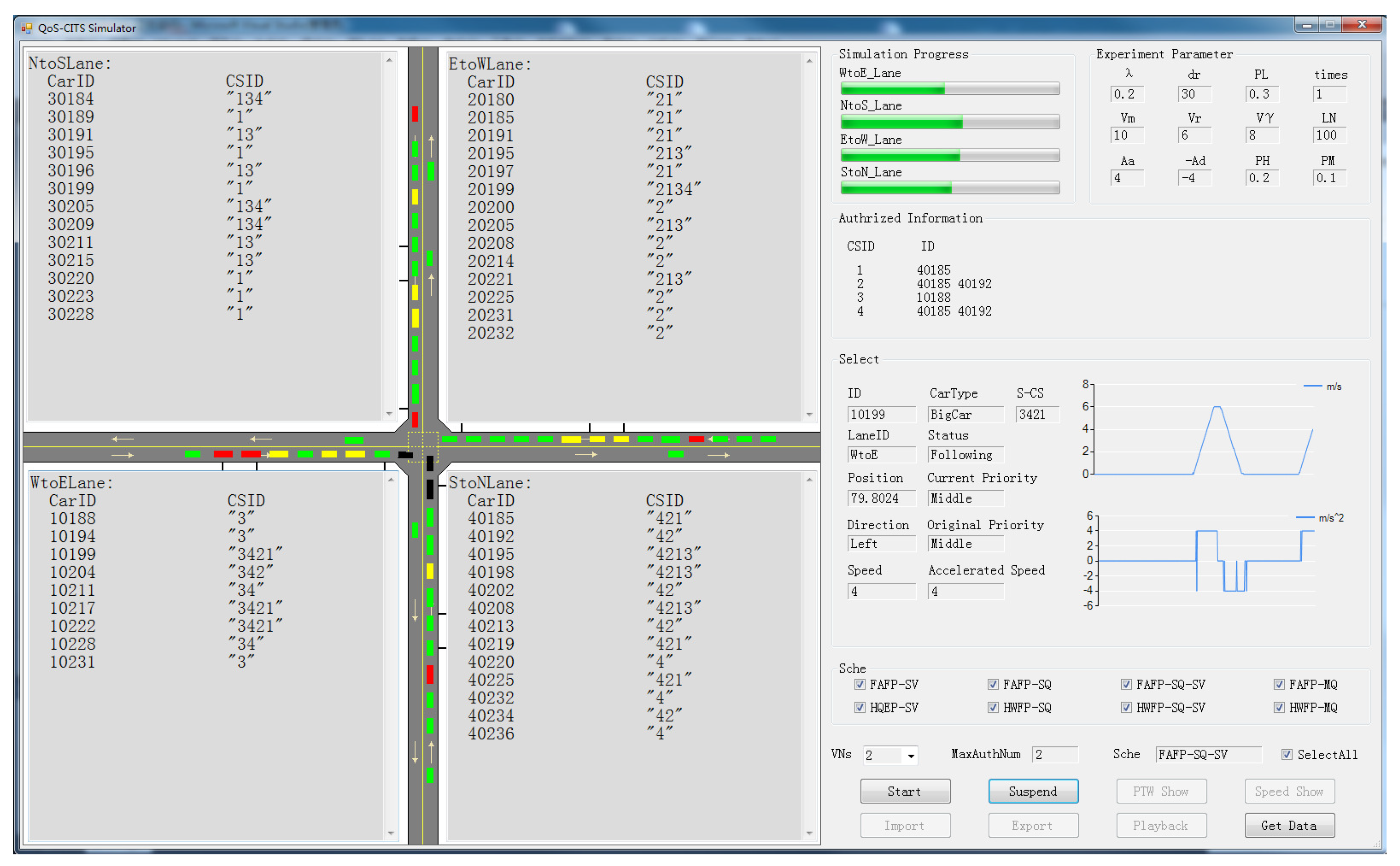
5. Verification Experiments and Analysis
5.1. Parameter Settings
5.2. Experiments and Analysis
- Reservation Distance:
- Density of Traffic Flow:
- Proportion of Large Vehicles:
- Proportion of Vehicles (H):
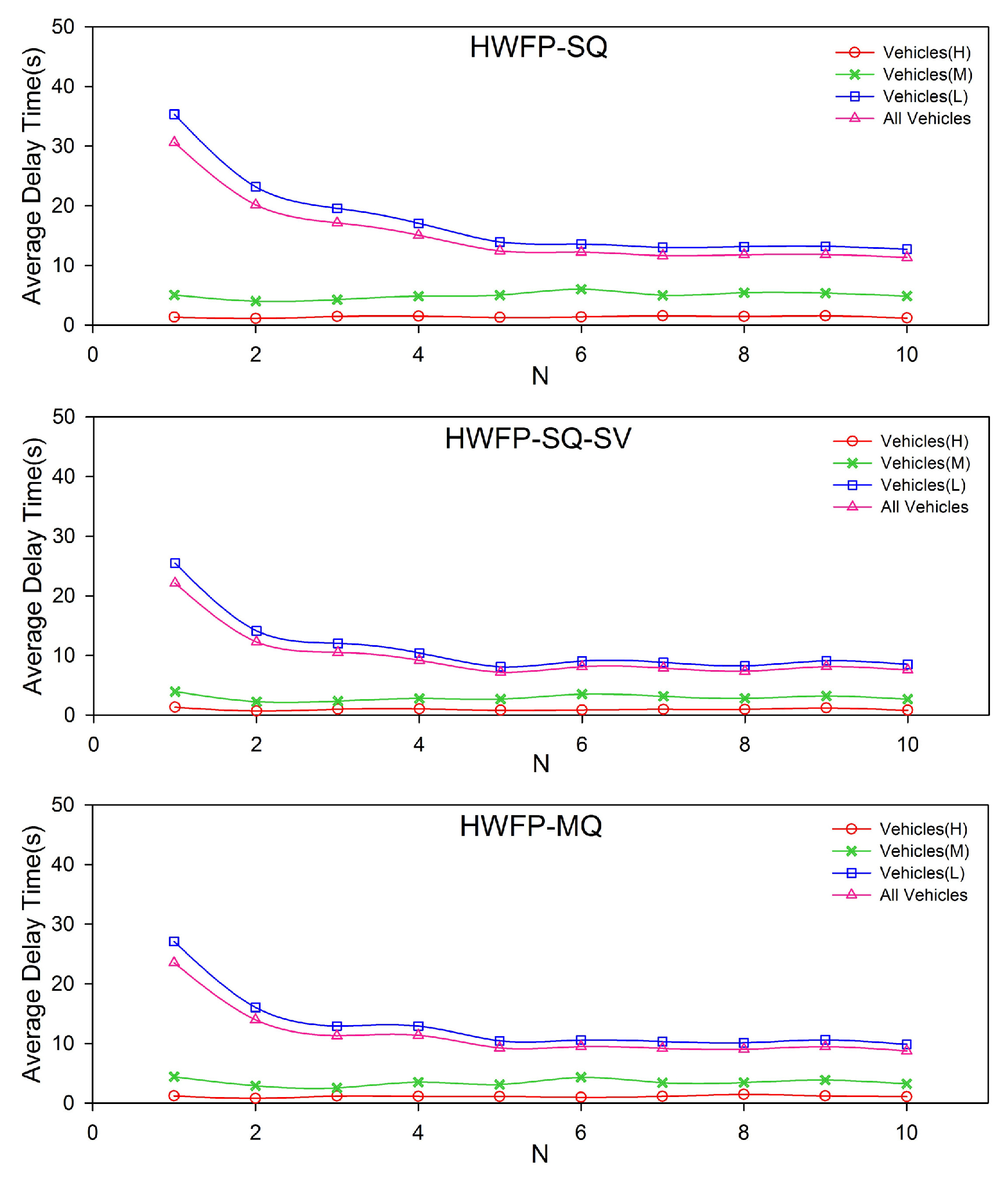
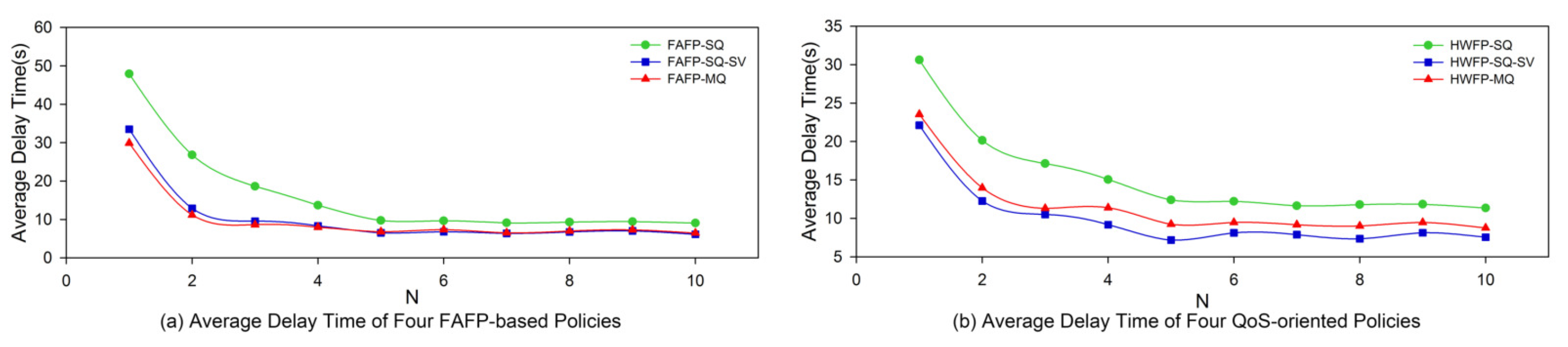
- Platoon Length: N
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- De La Fortelle, A.; Qian, X.; Diemer, S.; Grégoire, J.; Moutarde, F.; Bonnabel, S. Network of Automated Vehicles: The Autonet2030 Vision. In Proceedings of the 21st World Congress on the ITS World Congress (ITSWC), Detroit, MI, USA, 7–11 September 2014; Curran Associates, Inc.: Red Hook, NY, USA, 2014; pp. 2618–2626. [Google Scholar]
- Ido, K.; Nadav, L.; Eran, B. An agent-based model of the emergence of cooperation and a fair and stable system optimum using ATIS on a simple road network. Transp. Res. Part C Emerg. Technol. 2017, 86, 183–201. [Google Scholar]
- Yang, L.Q.; Wang, F.Y. Driving into Intelligent Spaces with Pervasive Communications. IEEE Intell. Syst. 2007, 22, 12–15. [Google Scholar] [CrossRef]
- Huang, S.; Sadek, A.W.; Zhao, Y.J. Assessing the Mobility and Environmental Benefits of Reservation-Based Intelligent Intersections Using an Integrated Simulator. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1201–1214. [Google Scholar] [CrossRef]
- Zhang, K.; Yang, A.; Su, H.; de La Fortelle, A.; Wu, X. Unified Modeling and Design of Reservation-based Cooperation Mechanisms for Intelligent Vehicles. In Proceedings of the 19th IEEE International Conference on Intelligent Transportation Systems(ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1192–1199. [Google Scholar]
- Bujari, A.; Palazzi, C.E. Wireless Vehicular Networks for Car Collision Avoidance, 1st ed.; Springer: New York, NY, USA, 2013. [Google Scholar]
- Zhang, K.; Zhang, D.; de La Fortelle, A.; Wu, X.; Grégoire, J. State-Driven Priority Scheduling Mechanisms for Driverless Vehicles Approaching Intersections. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2487–2500. [Google Scholar] [CrossRef]
- Li, L.; Wang, F.Y. Cooperative Driving at Blind Crossings using Intervehicle Communication. IEEE Trans. Veh. Technol. 2006, 55, 1712–1724. [Google Scholar] [CrossRef]
- Levin, M.; Boyles, S.; Patel, R. Paradoxes of reservation-based intersection controls in traffic networks. Transp. Res. Part A Policy Pract. 2016, 90, 14–25. [Google Scholar] [CrossRef]
- De La Fortelle, A. Analysis of Reservation Algorithms for Cooperative Planning at Intersections. In Proceedings of the 13th IEEE Conference on Intelligent Transportation Systems (ITSC), Funchal, Portugal, 19–22 September 2010; pp. 445–449. [Google Scholar]
- Dresner, K.; Stone, P. A Multiagent Approach to Autonomous Intersection Management. Int. J. Artif. Intell. Res. 2008, 31, 591–656. [Google Scholar] [CrossRef]
- Hausknecht, M.; Au, T.; Stone, P. Autonomous Intersection Management: Multi-intersection optimization. In Proceedings of the IEEE/RSJ 13th International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 4581–4586. [Google Scholar]
- Wuthishuwong, C.; Traechtler, A. Vehicle to Infrastructure Based Safe Trajectory Planning for Autonomous Intersection Management. In Proceedings of the IEEE 13th International Conference on ITS Telecommunications (ITST), Tampere, Finland, 5–7 November 2013; pp. 175–180. [Google Scholar]
- Qian, X.; Altché, F.; Grégoire, J.; de La Fortelle, A. Autonomous Intersection Management Systems: Criteria, Implementation and Evaluation. IEEE Trans. Intell. Transp. Syst. 2017, 11, 182–189. [Google Scholar] [CrossRef]
- Zhang, K.; Yang, A.; Su, H.; de La Fortelle, A.; Miao, K.; Yao, Y. Service-Oriented Cooperation Models and Mechanisms for Heterogeneous Driverless Vehicles at Continuous Static Critical Sections. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1867–1881. [Google Scholar] [CrossRef]
- Zhang, K.; Wang, M.; Su, H.; Yang, A.; de La Fortelle, A.; Miao, K.J. QoS-CITS: A Simulator for Service-oriented Cooperative ITS of Intelligent Vehicles. In Proceedings of the 16th IEEE International Conference on Computer and Information Science (ICIS), Wuhan, China, 24–26 May 2017; pp. 1–6. [Google Scholar]
- Varga, R.; Costea, A.; Florea, H.; Giosan, I.; Nedevschi, S. Super-sensor for 360-degree environment perception: Point cloud segmentation using image features. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–8. [Google Scholar]
- Tang, X.; Gao, F.; Xu, G.; Ding, N.; Cai, Y.; Ma, M.; Liu, J. Sensor Systems for Vehicle Environment Perception in a Highway Intelligent Space System. Sensors 2014, 14, 8513–8527. [Google Scholar] [CrossRef] [PubMed]
- Rakotovao, T.; Puschini, D.; Mottin, J.; Rummelhard, L.; Negre, A.; Laugier, C. Intelligent Vehicle Perception: Toward the Integration on Embedded Many-core. In Proceedings of the 6th Workshop on Parallel Programming and Run-Time Management Techniques for Many-Core Architectures (PARMA-DITAM), Amsterdam, The Netherlands, 19–21 January 2015; pp. 7–12. [Google Scholar]
- Lee, H.; Song, S.; Jo, S. 3D Reconstruction using a Sparse Laser Scanner and A Single Camera for Outdoor Autonomous Vehicle. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 629–634. [Google Scholar]
- Vivacqua, R.; Vassallo, R.; Martins, F. A Low Cost Sensors Approach for Accurate Vehicle Localization and Autonomous Driving Application. Sensors 2017, 17, 2359. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Seff, A.; Kornhauser, A.; Xiao, J. DeepDriving: Learning Affordance for Direct Perception in Autonomous Driving. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 2722–2730. [Google Scholar]
- Qiu, H.; Ahmad, F.; Govindan, R.; Gruteser, M.; Bai, F.; Kar, G. Augmented Vehicular Reality: Enabling Extended Vision for Future Vehicles. In Proceedings of the 18th International Workshop on Mobile Computing Systems and Application, Sonoma, CA, USA, 21–22 February 2017; pp. 67–72. [Google Scholar]
- Abualhoul, M.; Merdrignac, P.; Shagdar, O.; Nashashibi, F. Study and Evaluation of Laser-based Perception and Light Communication for A Platoon of Autonomous Vehicles. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1798–1804. [Google Scholar]
- Tian, Z.; Cai, Y.; Huang, S.; Hu, F.; Li, Y.; Cen, M. Vehicle tracking system for intelligent and connected vehicle based on radar and V2V fusion. In Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 6598–6603. [Google Scholar]
- Noh, S.; An, K. Decision-Making Framework for Automated Driving in Highway Environments. IEEE Trans. Intell. Transp. Syst. 2017, PP, 1–14. [Google Scholar] [CrossRef]
- Meng, F.; Su, J.; Liu, C.; Chen, W.H. Dynamic decision making in lane change: Game theory with receding horizon. In Proceedings of the 2016 UKACC 11th International Conference on Control (CONTROL), Belfast, UK, 31 August–2 September 2016. [Google Scholar]
- Kala, R.; Warwick, K. Motion Planning of Autonomous Vehicles in A Non-autonomous Vehicle Environment without Speed Lanes. Int. J. Eng. Appl. Artif. Intell. 2013, 26, 1588–1601. [Google Scholar] [CrossRef]
- Gonzalez, D.; Perez, J. Control Architecture for Cybernetic Transportation Systems in Urban Environments. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, Australia, 23–26 June 2013; pp. 1119–1124. [Google Scholar]
- Kurt, A. Discrete-State Encoding in Hybrid-State Systems for Intelligent Vehicle Control and Estimation. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1595–1600. [Google Scholar] [CrossRef]
- Zambrano-Martinez, J.L.; Calafate, C.T.; Soler, D.; Cano, J.C.; Manzoni, P. Modeling and Characterization of Traffic Flows in Urban Environments. Sensors 2018, 18, 2020. [Google Scholar] [CrossRef] [PubMed]
- Furda, A.; Vlacic, L. Enabling Safe Autonomous Driving in Real-World City Traffic using Multiple Criteria Decision Making. IEEE Trans. Intell. Transp. Syst. 2011, 3, 4–17. [Google Scholar] [CrossRef]
- Hubmann, C.; Becker, M.; Althoff, D.; Lenz, D.; Stiller, C. Decision making for autonomous driving considering interaction and uncertain prediction of surrounding vehicles. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1671–1678. [Google Scholar]
- Kim, K. Collision Free Autonomous Ground Traffic: A Model Predictive Control Approach. In Proceedings of the 2013 ACM/IEEE International Conference on Cyber-Physical Systems (ICCPS), Philadelphia, PA, USA, 8–11 April 2013; pp. 51–60. [Google Scholar]
- Weiskircher, T.; Wang, Q.; Ayalew, B. Predictive Guidance and Control Framework for (Semi-)Autonomous Vehicles in Public Traffic. IEEE Trans. Control Syst. Technol. 2015, 25, 2034–2046. [Google Scholar] [CrossRef]
- Rafaila, R.; Caruntu, C.; Livint, G. Centralized Model Predictive Control of Autonomous Driving Vehicles with Lyapunov Stability. In Proceedings of the 2016 IEEE 20th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 13–15 October 2016; pp. 663–668. [Google Scholar]
- Koga, A.; Okuda, H.; Tazaki, Y.; Suzuki, T.; Haraguchi, K.; Kang, Z. Realization of Different Driving Characteristics for Autonomous Vehicle by using Model Predictive Control. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 722–728. [Google Scholar]
- Rosolia, U.; Bruyne, S.; Alleyne, A. Autonomous Vehicle Control: A Nonconvex Approach for Obstacle Avoidance. IEEE Trans. Control Syst. Technol. 2017, 25, 469–484. [Google Scholar] [CrossRef]
- Beaucorps, P.D.; Streubel, T.; Verroust-Blondet, A.; Nashashibi, F.; Bradai, B.; Resende, P. Decision-making for automated vehicles at intersections adapting human-like behavior. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar]
- Aoki, S.; Rajkumar, R.R. A configurable synchronous intersection protocol for self-driving vehicles. In Proceedings of the 2017 IEEE 23rd International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA), Hsinchu, Taiwan, 16–18 August 2017; pp. 1–11. [Google Scholar]
- Santa, J.; Pereniguez, F.; Moragon, A.; Skarmeta, A.F. Vehicle-to-infrastructure Messaging Proposal Based on CAM/DENM Specifications. In Proceedings of the 2013 IEEE IFIP Wireless Days (WD), Valencia, Spain, 13–15 November 2013; pp. 1–7. [Google Scholar]
- Zohdy, I.H.; Kamalanathsharma, R.K.; Rakha, H. Intersection Management for Autonomous Vehicles using iCACC. In Proceedings of the 2012 IEEE 15th Conference on Intelligent Transportation Systems (ITSC), Anchorage, AK, USA, 16–19 September 2012; pp. 1109–1114. [Google Scholar]
- Tiganasu, A.; Lazar, C.; Caruntu, C.F. Design and simulation evaluation of cooperative adaptive cruise control for a platoon of vehicles. In Proceedings of the 2016 20th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 13–15 October 2016; pp. 669–674. [Google Scholar]
- Hafner, M.R.; Cunningham, D.; Caminiti, L.; Vecchio, D.D. Cooperative Collision Avoidance at Intersections: Algorithms and Experiments. IEEE Trans. Veh. Technol. 2013, 14, 1162–1175. [Google Scholar] [CrossRef]
- Mladenovic, M.N.; Abbas, M.M. Self-organizing Control Framework for Driverless Vehicles. In Proceedings of the IEEE 16th International Conference on Intelligent Transportation Systems (ITSC), The Hague, The Netherlands, 6–9 October 2013; pp. 2076–2081. [Google Scholar]
- Liu, B.; Kamel, A.E. V2X-Based Decentralized Cooperative Adaptive Cruise Control in the Vicinity of Intersections. IEEE Trans. Intell. Transp. Syst. 2016, 17, 644–658. [Google Scholar] [CrossRef]
- Campos, G.R.D.; Falcone, P.; Hult, R.; Wymeersch, H.; Sjöberg, J. Traffic coordination at road intersections: Autonomous decision-making algorithms using model-based heuristics. IEEE Intell. Transp. Syst. Mag. 2017, 9, 8–21. [Google Scholar] [CrossRef]
- Xu, B.; Li, S.E.; Bian, Y.; Li, S.; Ban, X.J.; Wang, J.; Li, K. Distributed conflict-free cooperation for multiple connected vehicles at unsignalized intersections. Transp. Res. Part C Emerg. Technol. 2018, 93, 322–334. [Google Scholar] [CrossRef]
- Elleuch, I.; Makni, A.; Bouaziz, R. Cooperative Intersection Collision Avoidance Persistent System Based on V2V Communication and Real-Time Databases. In Proceedings of the 2017 IEEE/ACS 14th International Conference on Computer Systems and Applications (AICCSA), Hammamet, Tunisia, 30 October–3 November 2017; pp. 1082–1089. [Google Scholar]
- Li, J.; Dridi, M.; El-Moudni, A. A cooperative traffic control for the vehicles in the intersection based on the Genetic Algorithm. In Proceedings of the 2016 IEEE 4th International Colloquium on Information Science and Technology (CiSt), Tangier, Morocco, 24–26 October 2017; pp. 627–632. [Google Scholar]
- Ran, B.; Boyce, D. Dynamic Urban Transportation Network Models: Theory and Implications for Intelligent Vehicle-Highway Systems, 1st ed.; Springer: Berlin, Germany, 2012. [Google Scholar]
- Ren, X.P.; Cai, Z.X. Using the Ackerman Principle for Kinematic Modeling of Wheeled Mobile Robots. CAA Trans. Intell. Syst. 2009, 4, 534–537. [Google Scholar]
- Simionescu, P.A.; Beale, D. Optimum Synthesis of the Fourbar Function Generator in its Symmetric Embodiment: the Ackermann Steering Linkage. Int. J. Mech. Mach. Theory 2002, 37, 1487–1504. [Google Scholar] [CrossRef]
- Kanagaraj, V.; Asaithambi, G.; Kumar, C.; Srinivasan, K.; Sivanandan, R. Evaluation of Different Vehicle Following Models under Mixed Traffic Conditions. Int. J. Procedia-Soc. Behav. Sci. 2013, 104, 390–401. [Google Scholar] [CrossRef]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO—Simulation of Urban Mobility: An Overview. In Proceedings of the Third International Conference on Advances in System Simulation, ThinkMind (SIMUL2011), Barcelona, Spain, 23–29 October 2011; pp. 55–60. [Google Scholar]
- Varga, A.; Hornig, R. An Overview of the OMNeT++ Simulation Environment. In Proceedings of the 1st International Conference on Simulation Tools and Techniques for Communications, Networks and Systems & Workshops, Marseille, France, 3–7 March 2008; p. 60. [Google Scholar]
- Debada, E.; Makarem, L.; Gillet, D. A virtual vehicle based coordination framework for Autonomous Vehicles in heterogeneous scenarios. In Proceedings of the 2017 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Vienna, Austria, 27–28 June 2017. [Google Scholar]
- Dos Santos, T.C.; Gómez, A.E.; Filho, C.M.; Gomes, D.; Perafan, J.C.; Wolf, D.F.; Osório, F.; Rosero, L.A. A Simulation Framework for Multi-Vehicle Communication. In Proceedings of the 2015 12th Latin American Robotics Symposium and 2015 3rd Brazilian Symposium on Robotics (LARS-SBR), Uberlandia, Brazil, 29–31 October 2015; pp. 301–308. [Google Scholar]
- Tang, W.; Yang, M.; Lyu, Z.; Qian, Q.; Su, T.; Wang, B.; Wang, C. MicroIV: A Cooperative Driving Hardware Simulation Platform for Cooperative-ITS. IEEE Trans. Veh. Technol. 2018, 1. [Google Scholar] [CrossRef]
- Chen, X.; Miao, Y. Driving Decision-Making Analysis of Car-Following for Autonomous Vehicle under Complex Urban Environment. In Proceedings of the 2016 9th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 10–11 December 2016; Volume 1, pp. 315–319. [Google Scholar]
- Artuñedo, A.; Godoy, J.; Haber, R.; Villagrá, J.; Toro, R.M.D. Advanced Co-simulation Framework for Cooperative Maneuvers Among Vehicles. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems (ITSC), Gran Canaria, Spain, 15–18 September 2015; pp. 1436–1441. [Google Scholar]
- Kim, H.; Park, J.; Kim, D.; Youn, C.H.; Han, J.; Kim, S.H.; Choi, J.; Yoon, D.; Jeon, M.; Yang, E. IsV2C: An Integrated Road Traffic-Network-Cloud Simulator for V2C Connected Car Services. In Proceedings of the 2017 IEEE International Conference on Services Computing (SCC), Honolulu, HI, USA, 25–30 June 2017; pp. 434–441. [Google Scholar]
- Fok, C.; Hanna, M.; Gee, S.; Au, T.; Stone, P.; Julien, C.; Vishwanath, S. A Platform for Evaluating Autonomous Intersection Management Policies. In Proceedings of the 2012 IEEE/ACM 3rd International Conference on Cyber-Physical Systems (ICCPS), Beijing, China, 17–19 April 2012; pp. 87–96. [Google Scholar]
- Gupta, N.; Vijay, R.; Korupolu, P.; Bansal, J.; Kapuria, A. Architecture of Autonomous Vehicle Simulation and Control Framework. In Proceedings of the 2015 ACM Conference on Advances In Robotics (AIR), Goa, India, 2–4 July 2015; pp. 1–6. [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Para | Definition | Para | Definition |
|---|---|---|---|
| Intersection, Critical Section, and Special Positions for one Intersection | |||
| identification number. | set of connected lanes. | ||
| direction of ; I: entering, O: leaving. | coordinates of two connecting points between and . | ||
| identification number. | coordinate vector of all vertices. | ||
| set of connected lanes. | status of section: available or forbidden. | ||
| length of . | width of . | ||
| token of . | vehicular current position. | ||
| position where vehicles beginning to adjust the velocity. | position where vehicles submit reservation messages. | ||
| position where vehicles start to decelerate if it can’t obtain . | position vehicles can’t travel across when is not authorized. | ||
| Model of Heterogenous Vehicles | |||
| identification number. | purpose of vehicle or vehicular mission. | ||
| vehicular priority, corresponding to its QoS. | classic vehicle-specific physical and kinematic parameters. | ||
| current lane. | current occupied section or null. | ||
| current state. | current action. | ||
| vector of required S-CSs. | vector of required tokens. | ||
| Vehicular Action Model | |||
| identification number. | , is status of this action. | ||
| action transition matrix: | condition matrix for action transiting: | ||
| Parameter | Value (Scope) | Parameter | Value (Scope) | Parameter | Value (Scope) |
|---|---|---|---|---|---|
| 4 | 4 | 3.5 m | |||
| 3.5 m | 3.5 m, 4.5 m | 1.5 m, 1.8 m | |||
| 4 m/s | −4 m/s | 2 m | |||
| 0.5m | 8 m∼10.5 m | 10 m∼70 m | |||
| 6 m | 1.42 m∼20 m | 10 m/s | |||
| 4 m/s∼10 m/s | 6 m/s∼10 m/s | 1%∼100% | |||
| 1%∼30% | 1%∼40% | 40%∼90% | |||
| 0.01∼1.0 | 0∼1.0 | 0∼1.0 | |||
| 0∼1.0 | 100 | 10 | |||
| 1 | N | 1∼10 | 10 ms |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, K.; Xie, C.; Wang, Y.; Wang, M.; De La Fortelle, A.; Zhang, W.; Duan, Z. Service-Oriented Cooperation Policies for Intelligent Ground Vehicles Approaching Intersections. Appl. Sci. 2018, 8, 1647. https://doi.org/10.3390/app8091647
Zhang K, Xie C, Wang Y, Wang M, De La Fortelle A, Zhang W, Duan Z. Service-Oriented Cooperation Policies for Intelligent Ground Vehicles Approaching Intersections. Applied Sciences. 2018; 8(9):1647. https://doi.org/10.3390/app8091647
Chicago/Turabian StyleZhang, Kailong, Ce Xie, Yujia Wang, Min Wang, Arnaud De La Fortelle, Weibin Zhang, and Zongtao Duan. 2018. "Service-Oriented Cooperation Policies for Intelligent Ground Vehicles Approaching Intersections" Applied Sciences 8, no. 9: 1647. https://doi.org/10.3390/app8091647
APA StyleZhang, K., Xie, C., Wang, Y., Wang, M., De La Fortelle, A., Zhang, W., & Duan, Z. (2018). Service-Oriented Cooperation Policies for Intelligent Ground Vehicles Approaching Intersections. Applied Sciences, 8(9), 1647. https://doi.org/10.3390/app8091647