1. Introduction
Composite materials have been widely used in a variety of fields, because of their specific properties, such as its light weight, high stiffness, high strength and corrosion resistance [
1,
2]. However, due to low velocity impact, manufacturing process and aging, delamination often occurs in the subsurface of material without any obvious indication on the surface. This invisible damage may cause catastrophic failure. Hence, it is required to develop an efficient and effective damage detection technique to ensure the safety of composite structures.
With the advantages of long propagation distance, high sensitivity to different kinds of defects, and low cost, Lamb wave-based damage detection methods have attracted a lot of attention [
3,
4,
5,
6,
7,
8]. However, due to the dispersion characteristic which results in amplitude decrease and wave deformation, Lamb wave signal is always difficult to interpret. Thus most of Lamb wave-based damage detection techniques rely on comparing the test signal with the baseline signal. Since the test signal varies with the environment and boundary conditions, subtle signal changes due to damage may be masked.
To address this issue, researchers have done numerous work regarding baseline-free damage detection in the past decade [
9,
10]. Specifically, the TRP has been widely used for Lamb wave-based damage detection, as it can not only achieve dispersion self-compensation but also realize baseline-free damage detection in composite laminates [
11,
12,
13,
14,
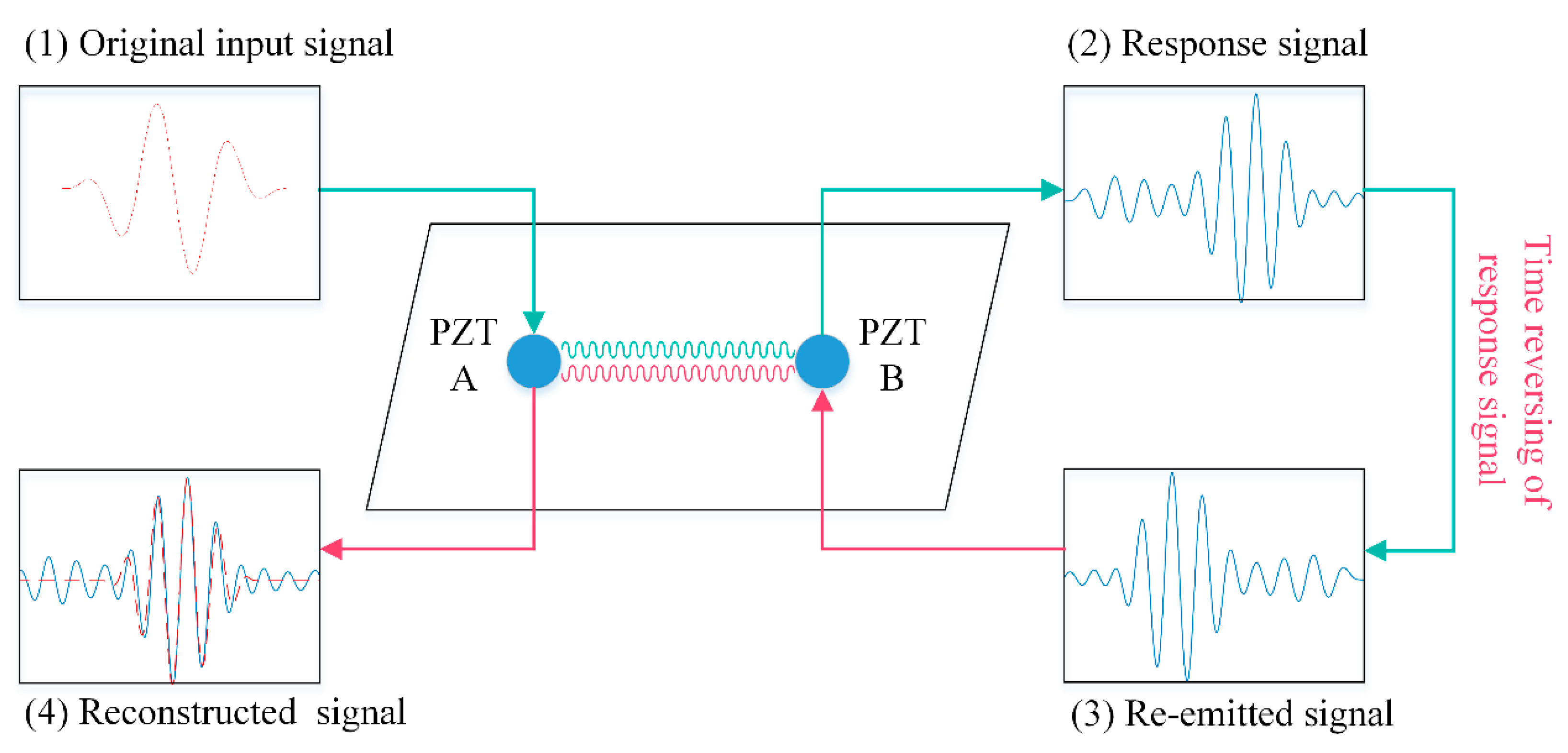
15]. In the TRP, an excitation signal is injected in one actuator, the response signal that captured by sensor is then time reversed and re-emitted at the sensor position. Therefore, the frequency components that arrive later will be re-emitted earlier, followed by the components with higher velocities. After the TRP, all the frequency components with different velocities will arrive at the original excitation position concurrently, and thus the dispersion could be compensated. For a healthy structure, the final signal will be the same as the original input signal. In contrast, the two signals will be different from each other if there is any damage present along the propagation path. Therefore, baseline-free damage detection could be realized by comparing the waveform of the reconstructed signal with that of the original input signal.
Researchers have done a lot of work to improve the performance of TRP. Park et al. [
13] combined a wavelet-based signal processing technique with TRM to enhance the time-reversibility of Lamb wave in composite laminates. Watkins et al. [
16] proposed a modified TRM, which uses a single actuator and multiple sensors. That is, the initial input signal and the secondary excitation signal are actuated by the same actuator. Liu et al. [
17] presented a virtual time reversal algorithm which only needs one actuating–receiving step to obtain the reconstructed signal. Agrahari et al. [
18] investigated the influences of adhesive layer between the transducer and the host plate, the excitation parameters, the transducer size and the plate thickness on the performance of the TRP to develop an effective damage detection strategy. Xu et al. [
19] investigated the effects of single-mode and two-mode Lamb waves on the effectiveness of time reversal damage detection process through theoretical and experimental analysis. And they concluded that, under narrow-band excitation, the time reversibility of single-mode Lamb waves could be greatly improved. Liang et al. [
20] and Huang et al. [
15] improved the performance of TRM in damage detection through alleviating the influence of the time reversal operator. Agrahari et al. [
21] and Mustapha et al. [
22] proposed some different damage indices to improve the sensitivity of the TRM to damage. These studies are all aimed at improving the performance of TRP. However, it is still unavoidable that a large number of experiments are required to optimize excitation parameters, and to determine the time intervals in which the waveform of the reconstructed signal is compared with that of the original input signal.
This study comprehensively discussed the effects of the two time intervals on the performance of Lamb wave TRP in composite laminates. Then, an efficient time reversal method (ETRM) is established, which could obtain multiple reconstructed signals related to different excitations through only one actuating-sensing step without determining time intervals. Firstly, a broadband excitation signal is used to acquire Lamb wave responses for a wide range of frequencies. Secondly, the short-time Fourier transform (STFT) combined with a time-varying filter is employed to extract the desired mode components in the time-frequency domain. Then the time-domain waveform of the extracted components is obtained through inverse STFT transform. After that, frequency domain deconvolution is applied to calculate multiple narrow-band reconstructed signals.
The rest of this paper is organized as follows. In
Section 2, the theory of the TRM for damage detection is introduced. Then the detailed steps of the proposed efficient time reversal method are given in
Section 3. In
Section 4, the effectiveness of the ETRM is demonstrated by experiments. The application of the ETRM for damage location in composite laminates is illustrated in
Section 5. Finally, conclusions are drawn in
Section 6.
2. Baseline-Free Damage Detection Using the Time Reversal Method of Lamb Wave
The time reversal method originated from time reversal acoustics [
23,
24]. Then the time reversal concept extended to Lamb wave propagation to reduce the effects of dispersion and to realize baseline-free damage detection [
12,
13]. In accordance with the time reversal concept, an original input signal,
s(
t), can be reconstructed at the initial excitation position A, if the response signal received at position B is reversed in the time domain, and re-emitted from position B to position A. This process is referred to as the time reversibility of Lamb waves. Therefore, damages (e.g., fiber breakage and delamination, crack opening-and-closing) could be detected by comparing the waveform of the reconstructed signal with that of the original input signal [
13]. The schematic diagram of the TRP is shown in
Figure 1.
The theoretical analysis of the TRP in the frequency domain is described as follows.
Use piezoelectric (PZT) as transducer. When a voltage signal
VA(
ω) is excited at actuator PZT A, it then converts to mechanical strain
εA(
ω) and activates a Lamb wave signal that propagates within the plate [
25].
where,
ω is the angular frequency, and
ka(
ω) is the electro-mechanical coupling coefficient at PZT A. The response signal,
VB(
ω,
r), that captured by sensor PZT B satisfies,
where,
kb(
ω) is the electro-mechanical coupling coefficient of PZT B,
r is the propagation distance of Lamb waves from actuator to sensor,
G(
ω,
r) is the transfer function of the sensing path. If the actuator and sensor are the same,
ka(
ω) =
kb(
ω) [
16]. Thus, Equation (2) can be rewritten as,
The response signal inversed in the time domain is equivalent to take complex conjugate in the frequency domain. Thus, the time reverse operation of the response signal
VB(
ω,
r) represented in the frequency domain is,
where, the superscript ‘*’ represents the complex conjugate operation.
The reversed signal is then re-emitted at PZT B which now acts as an actuator. The corresponding response signal captured by PZT A is the reconstructed signal
VR(
ω,
r). It is defined as,
Substituting Equation (4) into Equation (5), the reconstructed signal is rewritten as
Here, |
G(
ω,
r)|
2 is referred to as time reversal operator. It varies with frequency because the transfer function
G(
ω,
r) of Lamb waves propagating in composite laminates (including the effects of material damping) is frequency dependent. Therefore, the wave components at different frequencies will be non-uniformly attenuated and the initial input signal cannot be properly reconstructed. To alleviate this problem, narrowband signals are usually used as excitations [
13,
19].
The TRM-based damage detection is accomplished by comparing the waveform of the reconstructed signal with that of the original input signal. A damage index (DI) is used to measure the discrepancy between the waveform of the original input signal and that of the reconstructed signal. It is defined as follows [
14],
where,
t0 and
t1 define the time interval in which the two waveforms are compared,
VA(
t) is the original input signal,
Vr(
t) is the reconstructed signal. The
DI value falls within the range of (0, 1). If the two waveforms are fully coincident with each other,
DI = 0. If these two waveforms gradually deviate from each other, the
DI value increases and approaches 1.
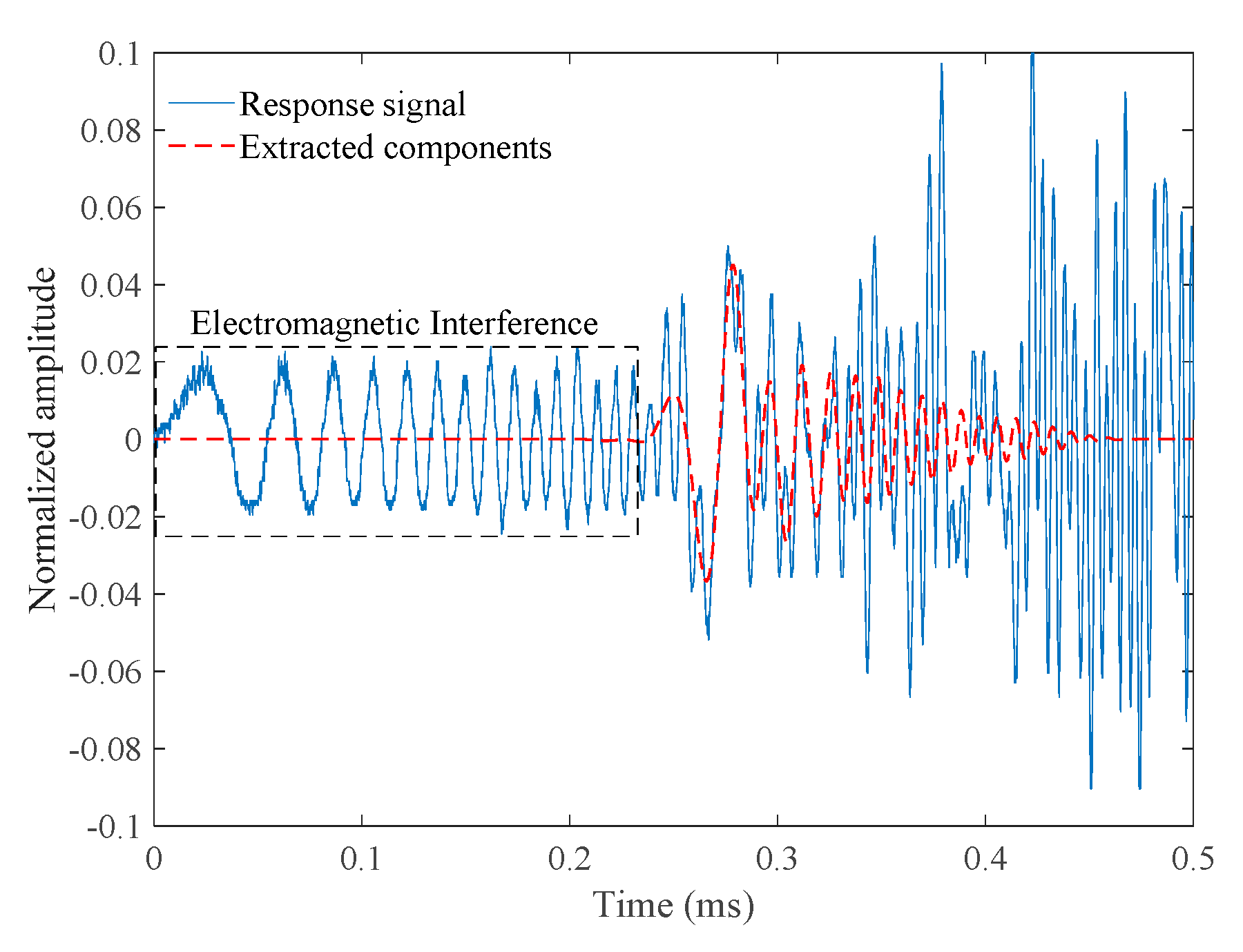
It is noted that when Lamb waves propagate in composite laminates, a response signal consists of many wave components. Such as, wave components propagate through the direct path (from actuator to sensor) and those reflected off from the edges of laminates. Because Lamb wave is easily affected by the boundary conditions, the extracted re-emitted and reconstructed components corresponding only to the direct path. Therefore, the determination of the two time intervals, in which the re-emitted and reconstructed components are extracted respectively, are very difficult. If the time intervals are too narrow, the direct wave components are incomplete. If they are too long, the extracted signal will contain other mode components and noises. Both will result in a large DI value, creating a false alarm of damage.
Moreover, the selection of the excitation parameters is also very important. In order to alleviate the influence of the time reversal operator and improve the SNR, narrowband signal is usually used as the original input signal. However, the time duration of narrowband signal is large. This will lead to the superposition of components in the response signal and reconstructed signal, and then produce a large DI value.
In a word, the traditional TRP requires a large number of experiments to optimize the two time intervals and the excitation parameters, and further each experiment includes two actuating–receiving steps, which can make the experiments time-consuming.
3. An Efficient Time Reversal Method
In this section, an ETRM is proposed to improve the practical applicability and efficiency of the time reversal concept. In the ETRM, multiple reconstructed signals related to different excitations can be acquired through only one actuating-sensing step, and further, the determining of the two time intervals could be avoided. That significantly reduces the hardware manipulation.
Figure 2 gives its schematic diagram. The steps of the ETRM are as follows:
(1) A broadband excitation signal is actuated from PZT A, and the response is captured by PZT B;
(2) Time-frequency analysis is performed on the broadband response signal. Then the ridge and the neighbor of the desired components are determined;
(3) Reconstructing the desired components in the time-frequency domain into waveforms in the time domain;
(4) The reconstructed signals related to narrowband excitations are obtained through deconvolution in frequency domain.
The analysis of the ETRM is also given in the frequency domain. As shown in
Figure 2, a broadband excitation signal
VA(
ω) is injected in actuator PZT A. The broadband response signal,
VB(
ω,
r), is captured by sensor PZT B.
Because of dispersion, attenuation and multi-modal propagation, broadband Lamb waves in composite laminates are difficult to interpret. Time-frequency representation (TFR) is an efficient method for the analysis of Lamb wave signal, because it provides a clear illustration for the temporal variation modal energy stream in the time-frequency domain. There are a variety of TFR algorithms that could map the Lamb wave signal from the time domain into time-frequency domain, e.g., short time Fourier transform [
26], wavelet transform [
27,
28], warped frequency transform [
29,
30], and fractional Fourier transform [
31]. Even though some of them cannot to extract and reconstruct the wave components, the time-varying filtering could be employed for breaking this limitation [
32,
33]. In this paper, for simplicity, the short-time Fourier transform (STFT) is used for illustration.
Mathematically, the STFT of a signal
s(
t) is formulated as
where,
t and
ω are the time and angular frequency, respectively,
h(
τ −
t) is a window function (commonly a Hanning or Gaussian window centered at
t).
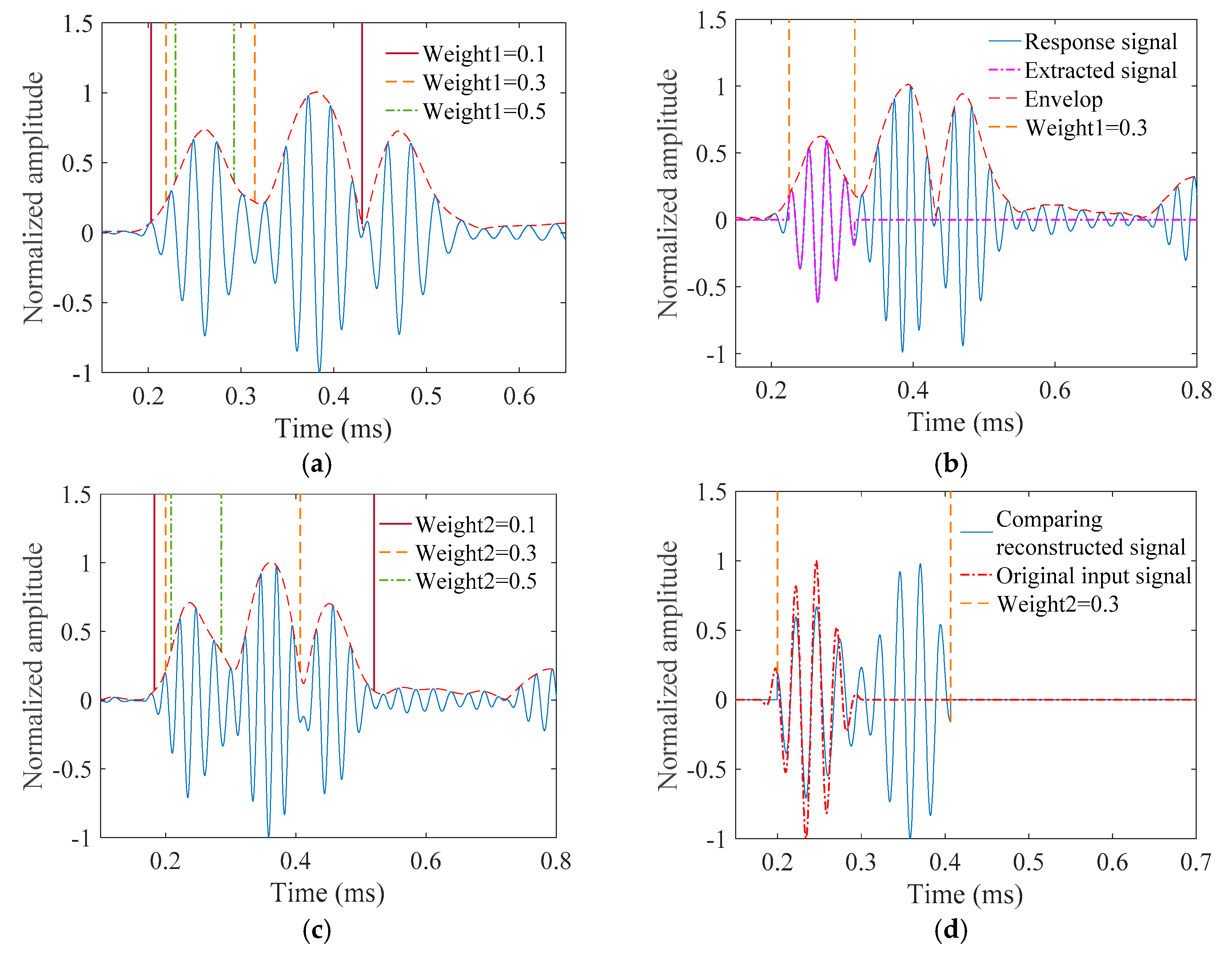
STFT is actually frequency transform of signal pieces in the window. Therefore, the energy of an instantaneous component will spread on the time-frequency plane due to the influence of window. To extract the desired components, not only the points on the ridge but also the adjacent area of the ridge need to be reconstructed. The adjacent area influences the accuracy of mode extraction obviously. A small neighbor area will result in loss of energy, while a large neighbor area may arise noises in the extracted signal.
In this paper, the left and right boundaries are determined by the decibels of the instantaneous frequency energy drop on the ridge. The percentage of energy drop is represented by
weight.
Figure 2 shows the schematic diagram of mode extraction, where the red solid line is the ridge of a Lamb wave mode.
AR is the amplitude of the ridge element corresponding to time
t and instantaneous frequency
f in the time-frequency matrix.
tl and
tr are the time range where the magnitude of elements at instantaneous frequency
f are larger than
weight times
AR, i.e.,
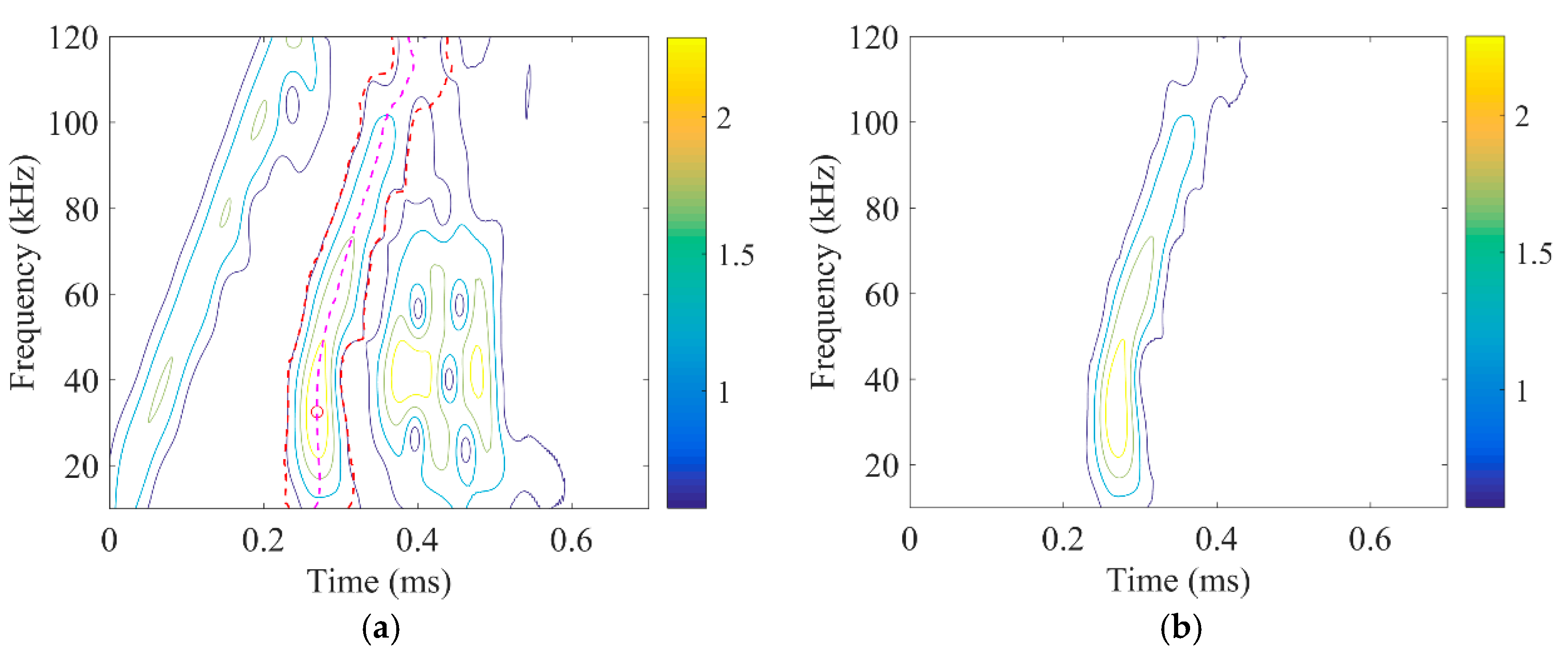
Once the left and right boundaries of the neighbor area (the blue area in
Figure 3) are determined, the desired components,
vd(
t,
r), could be extracted from the response signal by inverse STFT transform.
Subsequently, the transfer function of the desired Lamb wave mode propagating in the structure,
Gd(
ω,
r), is calculated as follows [
34]:
where
Vd(
ω,
r) is the Fourier transform of
vd(
t,
r).
For a narrowband excitation signal
Vn(
ω), whose bandwidth falls in that of
Gd(
ω,
r), the corresponding response signal
Rn(
ω,
r) can be expressed as follows [
34],
Substituting Equation (10) into Equation (11), the narrowband response
Rn(
ω,
r) is obtained as,
It means that the narrowband response could be directly calculated, without requiring hardware operation.
The response signal is then reversed in the time domain. Similar to Equation (4), that could be achieved by taking complex conjugate of the signal in the frequency domain. Next, the time-reversed signal,
R*n(
ω,
r), which acts as a secondary excitation signal, is virtually reemitted back to the structure through PZT B. By taking advantage of the properties of the Green’s functions, it can be easily shown that the elastic response of medium when launching the same excitation function from position A and recording in position B is the same as the one captured at A when launching at B, with no dependence on the geometry of the sample [
35]. Hence, the reconstructed signal
Rnr(
ω,
r) received by PZT A could be estimated as,
Substituting Equation (10) into Equation (13), the reconstructed signal could be rewritten as,
The ETRM has following advantages. Firstly, multiple narrow-band reconstructed signals can be obtained through only one broadband actuating-sensing step. Secondly, the response signal and the reconstructed signal only contain a direct wave of a Lamb wave mode. Therefore, there is no need to determine the two time intervals for extracting the re-emitted components and the reconstructed components. Thirdly, the narrow-band extraction process is also a filtering process, which will improve the SNR of the reconstructed signal. In a word, the proposed technique improves the efficiency and accuracy of the TRM.
5. The Application of ETRM for Damage Imaging of Composite Laminates
The specimen, PZT and the experiment setup are the same as in
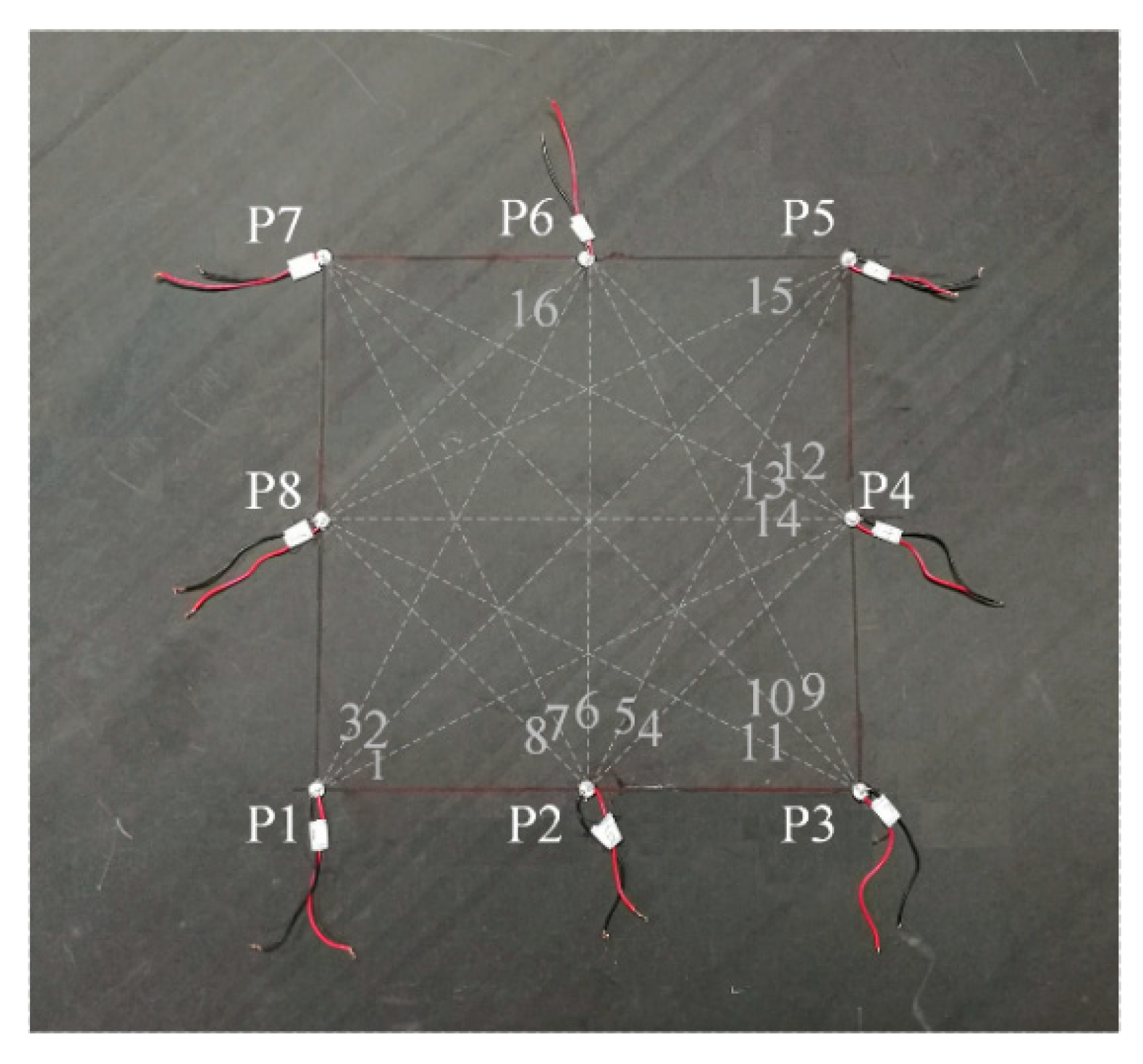
Section 4. Eight circular PZTs, with a distance of 140 mm between elements, are bounded on the specimen, and the layout is shown in
Figure 11. The dimension of the inspected area is 280 mm × 280 mm. An added mass, with dimension of 30 mm × 20 mm × 5 mm and centering at (46,−46) mm, is placed on the specimen to simulate delamination damage. A coordinate system is established with the origin set at the center of the sensor array. The coordinates of the eight PZTs are shown in
Table 2.
In the active sensor array, the eight PZTs take turns as actuator while the rest of them are listening. As shown in
Figure 11, there are 16 paths available for damage imaging. A typical chirp signal with frequency sweep from 10 kHz to 600 kHz over a 1-ms window is excited in turn.
The mode extraction method proposed in
Section 4 is used to extract the direct wave components of A0 mode. Then the ETRM is used to calculate the narrow-band reconstructed signal corresponding to a five-cycle 40-kHz tone burst excitation. For instance, the comparison between the reconstructed signals and the original input signal of Path 1 and Path 2 is shown in
Figure 12a. With damage on the Path 1, the associated reconstructed signal significantly deviate from the original input signal. While, they are almost the same for the healthy Path 2. The DI values of all the 16 paths are shown in
Figure 12b. It can be seen that the DI values of Path 1, Path 5 and Path 10 are significantly higher than those of other paths, indicating the presence of damage on these paths.
Subsequently, a probabilistic imaging algorithm is introduced to estimate the location of damage [
37,
38]. In this algorithm, DI value is used to represent the severity of damage along a sensing path. The inspection area that enclosed in the sensor array is meshed into uniform grids. The probability of damage present at a certain node
Ni (
i=1, …,
n ×
n) in the inspection area, is defined as,
where,
DIj is the
DI value of the
j-th sensing path, and
f(
zij) is the Gaussian distribution function defined as follows [
39,
40],
where, σ is the standard variance,
zij indicates the distance from node
Ni to the
j-th sensing path, it is defined as,
where, (
xjA,
yjA) and (
xjS,
yjS) are the coordinates of actuator and sensor of the
j-th sensing path, respectively, (
xNi,
yNi) is the coordinate of node
Ni.
Figure 13a–c show the imaging results (i.e., σ = 0.01) as the
weight takes 0.1, 0.2 and 0.3, respectively. Each individual image is normalized by its maximum values. The actual center of the simulated damage is indicated by a red ‘o’, and the estimated center is denoted by a blue ‘+’. As
Figure 13 shows, the damage location can be accurately located under different
weight values. These results demonstrate the effectiveness of the ETRM for damage detection in composite laminates.
For comparison,
Figure 14 a, b and c give the imaging results of the traditional TRM as
weight1 takes 0.1, 0.2, and 0.3, respectively. It can be seen that the grid with the highest probability value for the presence of damage sits at the sensor sites, rather than the actual damage site. Besides, there are a number of fake peaks at the intersections of different sensing paths, which contaminate the imaging results. It may be possible to obtain accurate results by continuously adjusting the excitation parameters, the
weight1 value and
weight2 value. But that requires a large number of experiments, i.e., 2 ×
n ×
m ×
p ×
k experiments, where
n indicates the number of propagation paths in the sensor array,
m,
p, and
k represent the number of changes of excitation parameters,
weight1 and
weight2, respectively. For example, we have conducted 2 × 16 × 1 × 3 × 1 = 96 experiments to obtain these results (
Figure 14), which is very time consuming.
6. Conclusions
In this study, the performance of the traditional TRM is discussed theoretically and experimentally. An efficient time reversal technique is further proposed and its effectiveness is verified by experiments.
The traditional TRM requires two actuating–receiving steps for each signal path. Furthermore, it requires determination of the two time intervals, in which the re-emitted components and reconstructed components are extracted. Experimental results showed that these two time intervals have great influence on the performance of TRM. However, the determination of these two time intervals requires a large number of experiments. Thus, it is quite time-consuming.
In contrast, the ETRM requires only one actuating–receiving step for any signal path, and multiple reconstructed signals related to different narrowband excitations could be obtained by one experiment. Thus, the hardware manipulation could be greatly reduced. In addition, the ETRM does not require determination of the two time intervals, which makes it effective and efficient.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}