A Hierarchical Mission Planning Method for Simultaneous Arrival of Multi-UAV Coalition


Abstract
Featured Application
Abstract
1. Introduction
2. Description of the Multi-UAV Cooperative Attack Problem
- For simplicity, the take-off and landing process of UAVs were not taken into account, the collision avoidance among UAVs were achieved by altitude layering.
- In the task allocation process, the communication topology remained unchanged.
- The aerodynamic and attitude of UAVs were not considered.
- The obstacles and targets considered in this paper were static.
2.1. Targets and UAVs
2.2. Objective Function and Constraints
3. Task Allocation
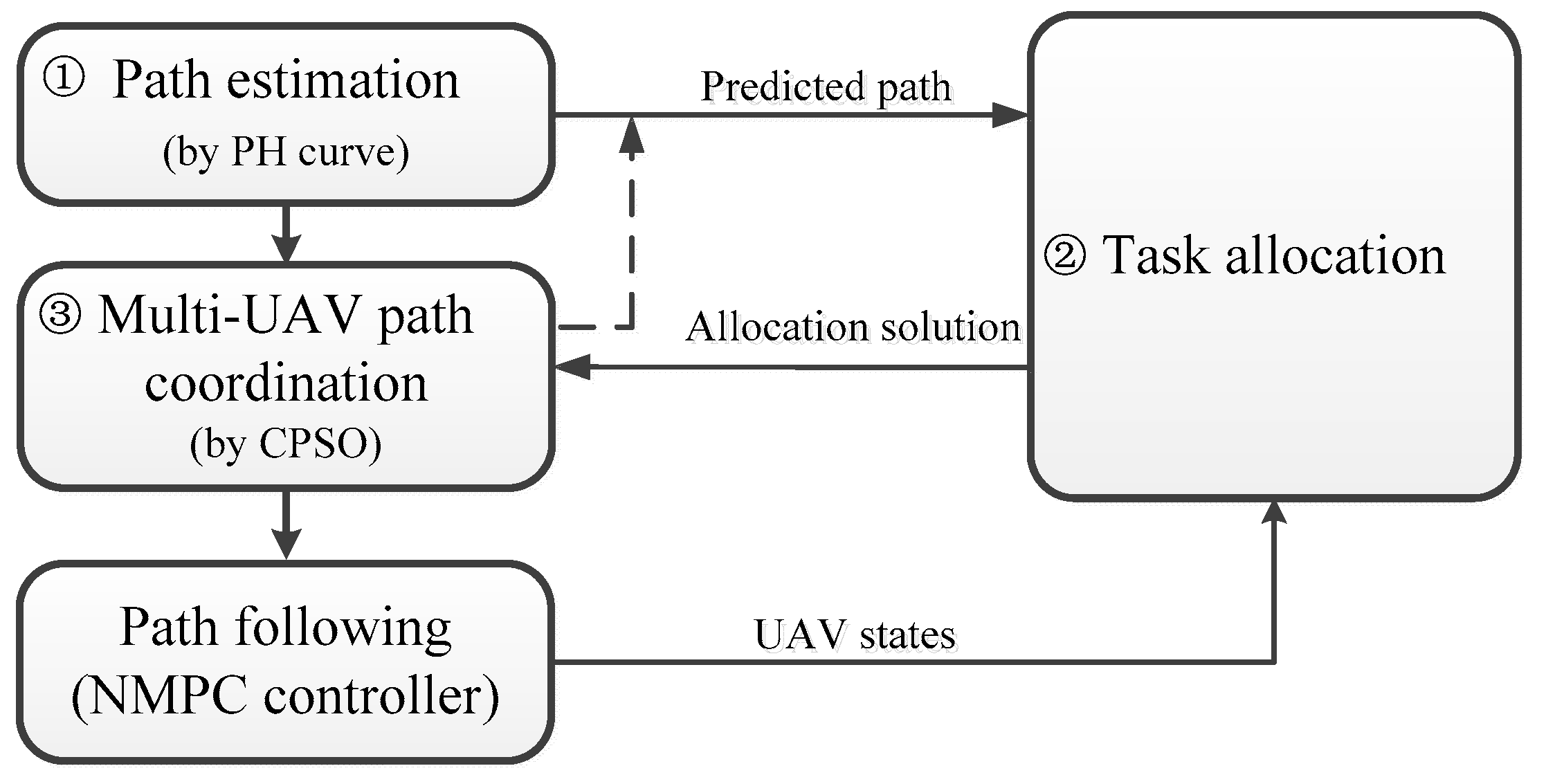
3.1. Framework of the Mission Planning Method
3.2. Task Allocation Algorithm
| Algorithm 1. Task allocation algorithm |
| Input:: The set of targets and initial states; : Resource requirement of targets; : The set of UAVs and initial states; : Resources of UAVs; Output:: The allocation matrix of the UAV team 1: fordo 2: for do 3: for to the number of unallocated targets 4: calculate estimated reward for performing target 5: end for 6: select the pre-allocated target for 7: end for 8: consensus on pre-allocated target in this allocation round and select the manger UAV 9: coalition_formation ---Algorithm 2 10: the UAVs in the coalition add the target into their task sequence 11: calculate resource consumption for UAVs in the coalition 12: cooperative path planning for simultaneous arrival to target ---Section 4 13: end for |
| Algorithm 2. Select the coalition to perform target |
| Input: Potential coalition members , number of potential coalition member , resource requirement of the target , initial value of target . Output: The coalition to perform the target 1: for do 2: calculate all the potential coalitions of size 3: for to the number of potential coalitions do 4: total resources of the potential coalition 5: if 6: append the potential coalition 7: end if 8: end for 9: if isempty 10: continue 11: else 12: select the coalition which have the highest utility to perform target 13: end if 14: end for |
3.3. Complexity Analysis of the Task Allocation Algorithm
4. Path Estimation and Simultaneous Arrival Path Planning
4.1. Pythagorean Hodograph Curve
4.2. Path Estimation
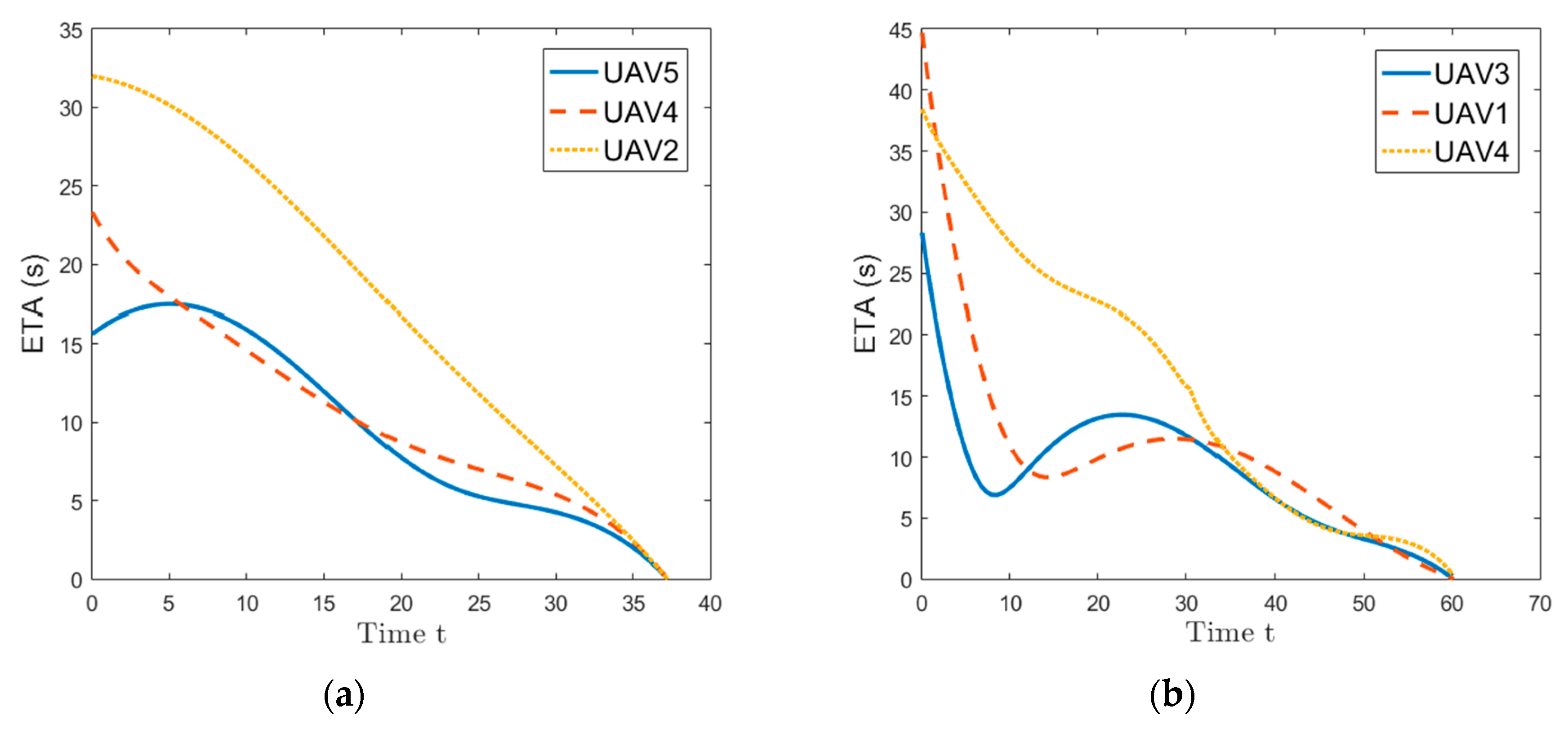
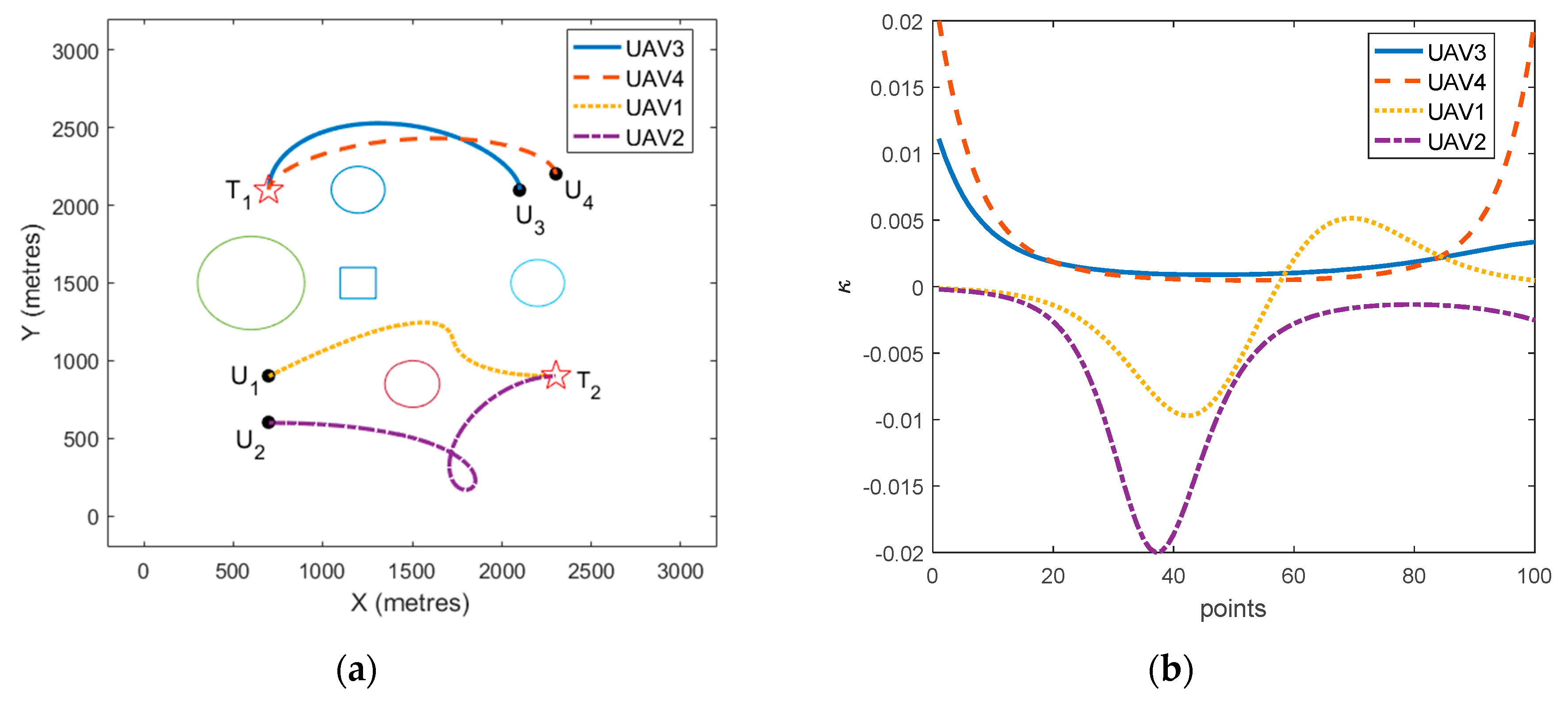
4.3. Path Planning for Simultaneous Arrival
5. Simulation Results
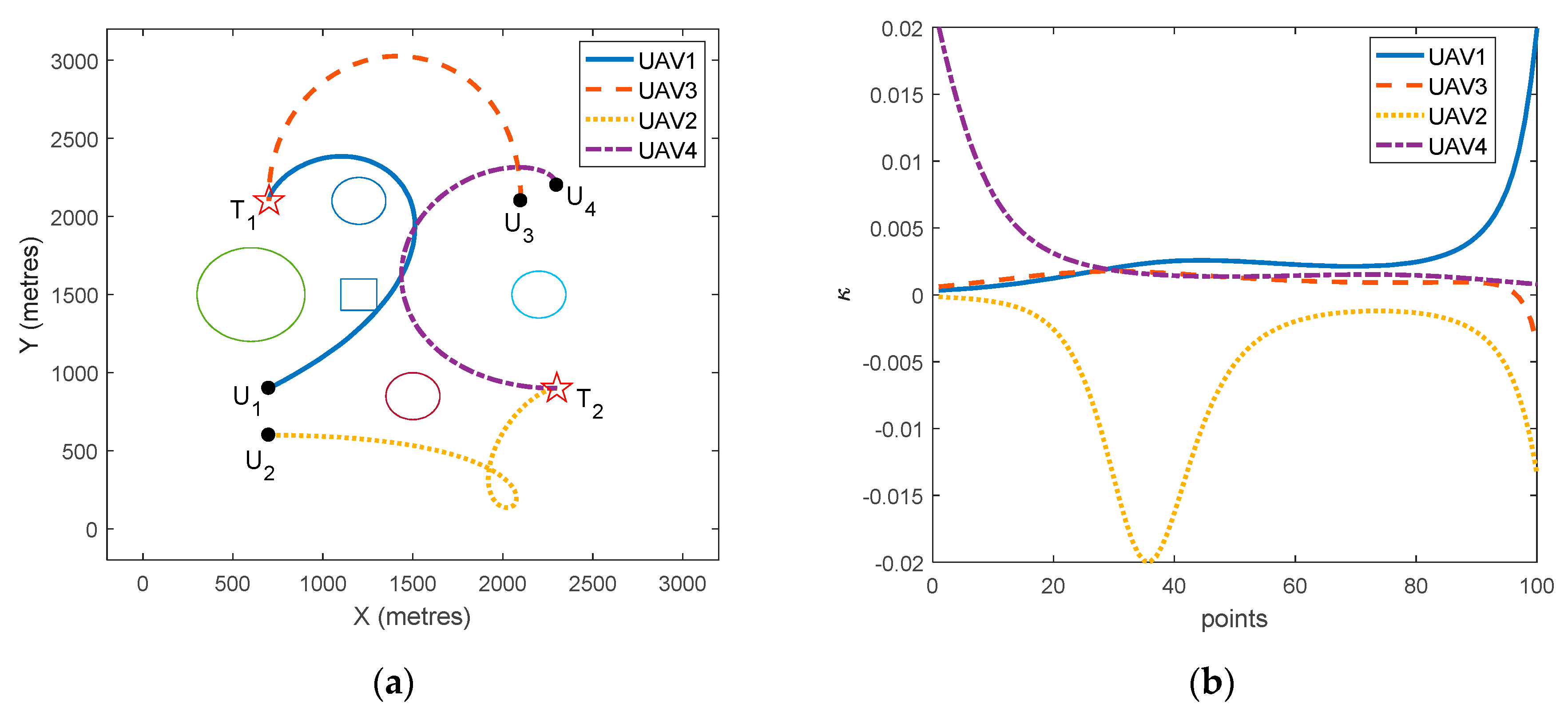
5.1. General Scenario
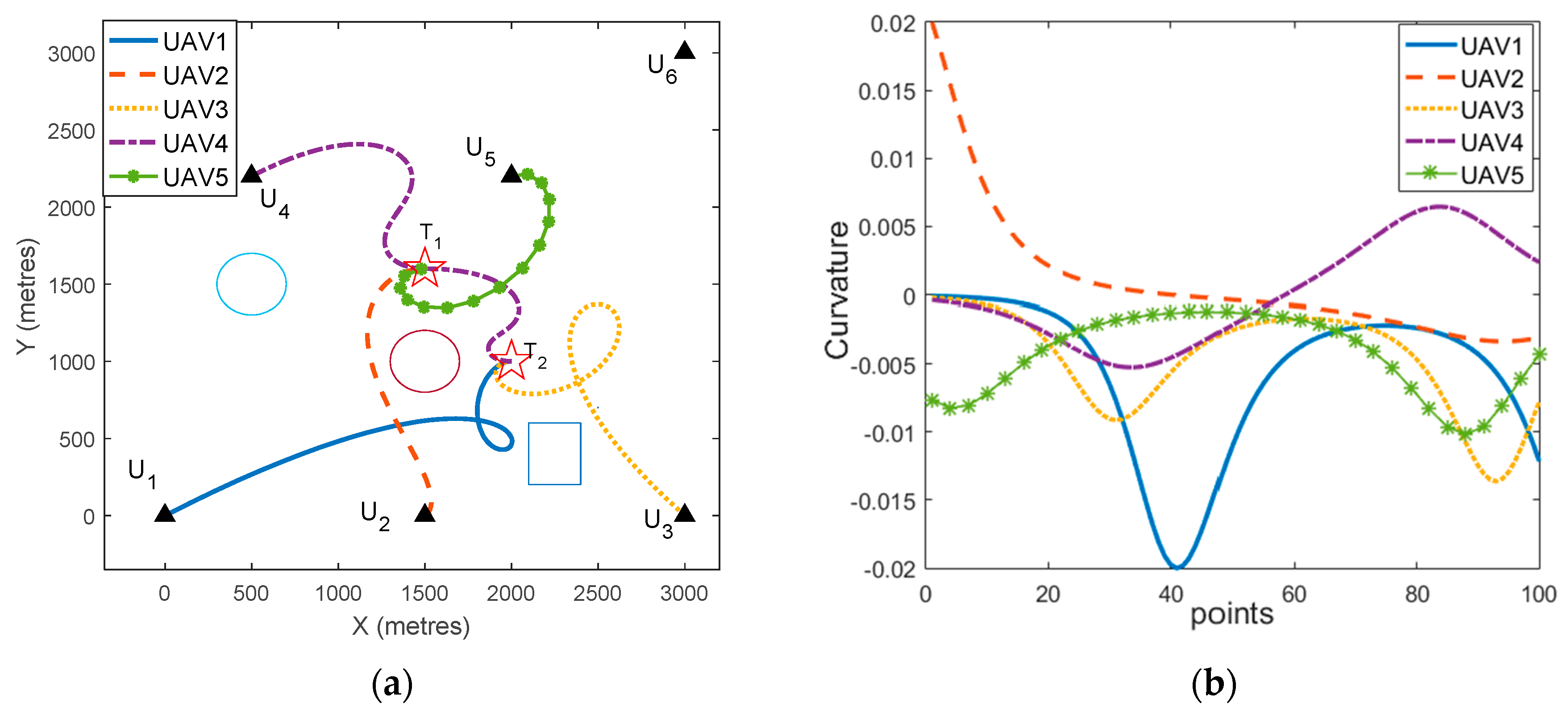
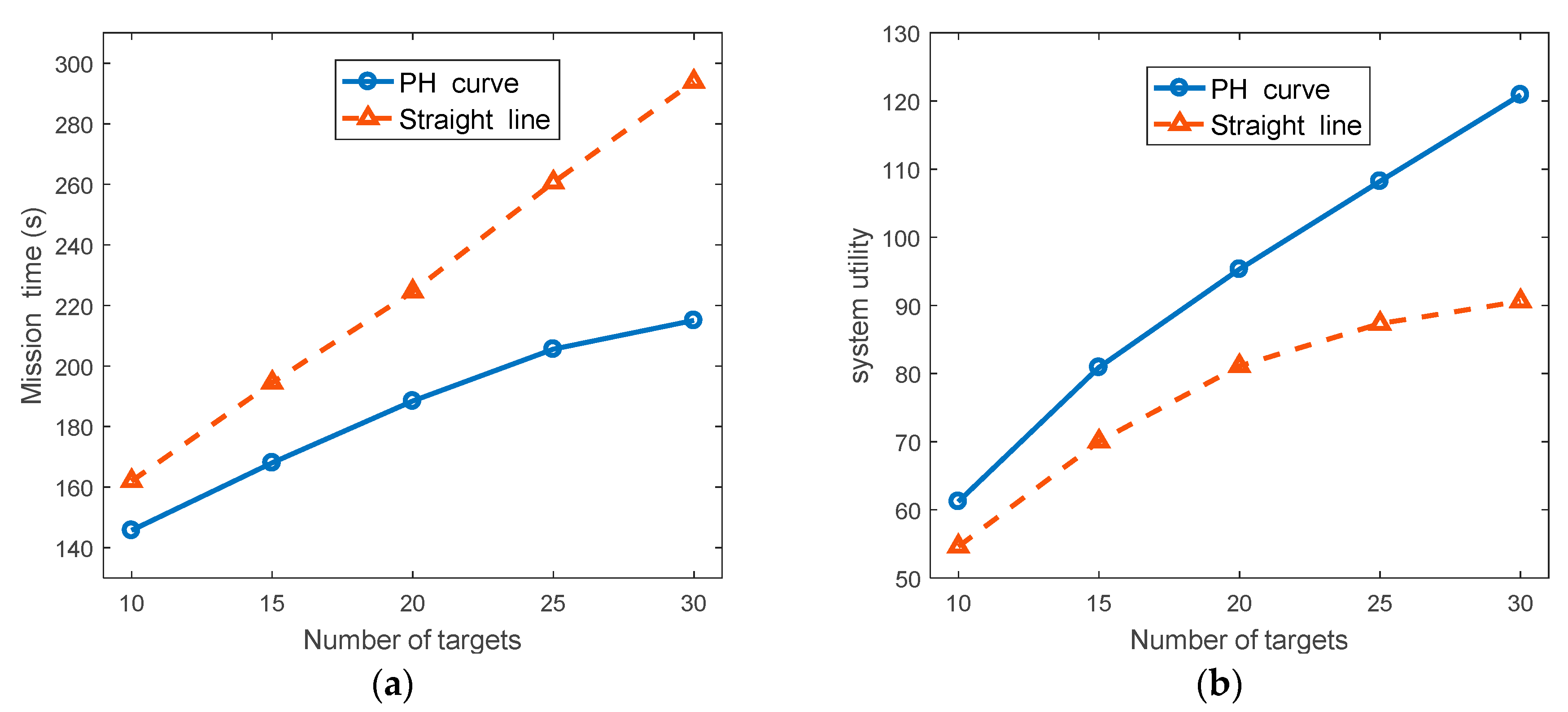
5.2. Effects of Different Path Estimation Methods on Task Allocation
5.3. Comparison of Three Task Allocation Algorithms
6. Conclusions
- Considering the resource requirement of targets, UAV’s resource consumption and task sequence, the proposed task allocation algorithm could obtain feasible solutions for the UAVs.
- The proposed path planning method could generate flyable and safe paths for the UAVs considering several constraints, such as simultaneous arrival, UAV’s kinematic and collision avoidance with obstacles.
- The Monte Carlo results showed that path estimation using the PH curve performed better than that using the straight line. The proposed task allocation algorithm could obtain a lower mission completion time and higher system utility compared with the PSO algorithm and the modified resource welfare-based task allocation algorithm.
Author Contributions
Funding
Conflicts of Interest
References
- Wei, Z.Q.; Wu, H.C.; Huang, S.; Feng, Z.Y. Scaling Laws of Unmanned Aerial Vehicle Network with Mobility Pattern Information. IEEE Commun. Lett. 2017, 21, 1389–1392. [Google Scholar] [CrossRef]
- Zhen, Z.Y.; Xing, D.J.; Gao, C. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerosp. Sci. Technol. 2018, 76, 402–411. [Google Scholar] [CrossRef]
- Yuan, C.; Zhang, Y.M.; Liu, Z.X. A survey on technologies for automatic forest fire monitoring, detection, and fighting using unmanned aerial vehicles and remote sensing techniques. Can. J. Forest Res. 2015, 45, 783–792. [Google Scholar] [CrossRef]
- Sharma, V.; Nalin, K.; Jayakody, D.; Srinivasan, K.; Kumar, R. Coagulation Attacks over Networked UAVs: Concept, Challenges, and Research Aspects. Int. J. Eng. Technol. 2018, 7, 183–187. [Google Scholar] [CrossRef]
- Sharma, V.; Kumar, R. A Cooperative Network Framework for Multi-UAV Guided Ground Ad Hoc Networks. J. Intell. Robot. Syst. Theory Appl. 2014, 77, 629–652. [Google Scholar] [CrossRef]
- Yao, W.; Qi, N.; Wan, N.; Liu, Y. An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles. Aerosp. Sci. Technol. 2019, 86, 455–464. [Google Scholar] [CrossRef]
- Yao, W.R.; Qi, N.M.; Liu, Y.F. Online Trajectory Generation with Rendezvous for UAVs Using Multistage Path Prediction. J. Aerosp. Eng. 2017, 30. [Google Scholar] [CrossRef]
- Meng, W.; He, Z.R.; Su, R.; Yadav, P.K.; Teo, R.; Xie, L.H. Decentralized Multi-UAV Flight Autonomy for Moving Convoys Search and Track. IEEE Trans. Control Syst. Technol. 2017, 25, 1480–1487. [Google Scholar] [CrossRef]
- Meng, W.; He, Z.R.; Teo, R.; Su, R.; Xie, L.H. Integrated multi-agent system framework: Decentralised search, tasking and tracking. Iet Control Theory Appl. 2015, 9, 493–502. [Google Scholar] [CrossRef]
- Edison, E.; Shima, T. Integrated task assignment and path optimization for cooperating uninhabited aerial vehicles using genetic algorithms. Comput. Oper. Res. 2011, 38, 340–356. [Google Scholar] [CrossRef]
- Wu, W.N.; Wang, X.G.; Cui, N.G. Fast and coupled solution for cooperative mission planning of multiple heterogeneous unmanned aerial vehicles. Aerosp. Sci. Technol. 2018, 79, 131–144. [Google Scholar] [CrossRef]
- Gottlieb, Y.; Shima, T. UAVs Task and Motion Planning in the Presence of Obstacles and Prioritized Targets. Sensors 2015, 15, 29734–29764. [Google Scholar] [CrossRef] [PubMed]
- Gerkey, B.P.; Matarić, M.J. A Formal Analysis and Taxonomy of Task Allocation in Multi-Robot Systems. Int. J. Robot. Res. 2004, 2004, 2004. [Google Scholar] [CrossRef]
- Ruan, L.; Chen, J.; Guo, Q.; Jiang, H.; Zhang, Y.; Liu, D. A Coalition Formation Game Approach for Efficient Cooperative Multi-UAV Deployment. Appl. Sci. 2018, 8, 2427. [Google Scholar] [CrossRef]
- Manathara, J.G.; Sujit, P.B.; Beard, R.W. Multiple UAV Coalitions for a Search and Prosecute Mission. J. Intell. Robot. Syst. 2011, 62, 125–158. [Google Scholar] [CrossRef]
- Sujit, P.B.; Manathara, J.G.; Ghose, D.; Sousa, J.B.D. Decentralized Multi-UAV Coalition Formation with Limited Communication Ranges. In Handbook of Unmanned Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2015; pp. 2021–2048. [Google Scholar]
- Kim, M.H.; Baik, H.; Lee, S. Resource Welfare Based Task Allocation for UAV Team with Resource Constraints. J. Intell. Robot. Syst. 2015, 77, 611–627. [Google Scholar] [CrossRef]
- Sharma, V.; Reina, D.G.; Kumar, R. HMADSO: A novel hill Myna and desert Sparrow optimization algorithm for cooperative rendezvous and task allocation in FANETs. Soft Comput. 2018, 22, 6191–6214. [Google Scholar] [CrossRef]
- Oh, G.; Kim, Y.; Ahn, J.; Choi, H.L. Market-Based Task Assignment for Cooperative Timing Missions in Dynamic Environments. J. Intell. Robot. Syst. 2017, 87, 97–123. [Google Scholar] [CrossRef]
- Manathara, J.G.; Ghose, D. Rendezvous of Multiple UAVs with Collision Avoidance Using Consensus. J. Aerosp. Eng. 2012, 25, 480–489. [Google Scholar] [CrossRef]
- Lin, Z.J.; Hong-Tao, L.H. Consensus based on learning game theory with a UAV rendezvous application. Chin. J. Aeronaut. 2015, 28, 191–199. [Google Scholar] [CrossRef]
- Choe, R.; Puig-Navarro, J.; Cichella, V.; Xargay, E.; Hovakimyan, N. Cooperative Trajectory Generation Using Pythagorean Hodograph Bezier Curves. J. Guid. Control Dyn. 2016, 39, 1744–1763. [Google Scholar] [CrossRef]
- Ismail, A.; Bagula, B.A.; Tuyishimire, E. Internet-Of-Things in Motion: A UAV Coalition Model for Remote Sensing in Smart Cities. Sensors 2018, 18, 2184. [Google Scholar] [CrossRef]
- Tsourdos, A.; White, B.; Shanmugavel, M. Cooperative Path Planning of Unmanned Aerial Vehicles; Wiley: Weinheim, Germany, 2010; pp. 1601–1602. [Google Scholar]
- Xiang, Y.; Zhang, Y. Sense and avoid technologies with applications to unmanned aircraft systems: Review and prospects. Prog. Aerosp. Sci. 2015, 74, 152–166. [Google Scholar]
- Shanmugavel, M.; Tsourdos, A.; White, B.; Zbikowski, R. Co-operative path planning of multiple UAVs using Dubins paths with clothoid arcs. Control Eng. Pract. 2010, 18, 1084–1092. [Google Scholar] [CrossRef]
- Vachtsevanos, G.J.; Tang, L.; Drozeski, G.; Gutierrez, L. From mission planning to flight control of unmanned aerial vehicles: Strategies and implementation tools. Annu. Rev. Control 2005, 29, 101–115. [Google Scholar] [CrossRef]
- Pierpaoli, P.; Rahmani, A. UAV collision avoidance exploitation for noncooperative trajectory modification. Aerosp. Sci. Technol. 2018, 73, 173–183. [Google Scholar] [CrossRef]
- Farouki, R.T.; Giannelli, C.; Mugnaini, D.; Sestini, A. Path planning with Pythagorean-hodograph curves for unmanned or autonomous vehicles. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2018, 232, 1361–1372. [Google Scholar] [CrossRef]
- Farouki, R.T. Construction of G 1 planar Hermite interpolants with prescribed arc lengths. Comput. Aided Geom. Des. 2016, 46, 64–75. [Google Scholar] [CrossRef]
- Yan, F.; Zhu, X.; Zhou, Z.; Tang, Y. Heterogeneous multi-unmanned aerial vehicle task planning: Simultaneous attacks on targets using the Pythagorean hodograph curve. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Targets | Initial Location (m) | Resource Requirement | Initial Value |
|---|---|---|---|
| Target 1 | 100 | ||
| Target 2 | 90 |
| UAVs | Initial Location (m) | Heading Angle (rad) | Initial Resource |
|---|---|---|---|
| UAV 1 | |||
| UAV 2 | |||
| UAV 3 | |||
| UAV 4 | |||
| UAV 5 | |||
| UAV 6 |
| Parameters | Notation | Value |
|---|---|---|
| Descent rate of target’s reward | 0.05 | |
| The minimum turning radius of the UAV | 50 | |
| Weight value of the target reward in Equation (6) | 0.8 | |
| Weight value of the cost in Equation (6) | 0.2 | |
| Weight value in Equation (25) | 0.8 | |
| Velocity of the UAVs | ||
| Population size of the PSO algorithm | 50 | |
| Acceleration coefficient of the PSO algorithm | 2 | |
| Acceleration coefficient of the PSO algorithm | 2 |
| UAVs | Initial Location (m) | Heading Angle (rad) | Initial Resource |
|---|---|---|---|
| UAV 1 | |||
| UAV 2 | 0 | ||
| UAV 3 | |||
| UAV 4 |
| Targets | Initial Location (m) | Resource Requirement | Initial Value |
|---|---|---|---|
| Target 1 | 100 | ||
| Target 2 | 90 |
| Figure # | Path Estimation | Mission Time (s) | System Utility |
|---|---|---|---|
| 4a | Straight line | 51.7 | 1.3 |
| 5a | PH curve | 35.6 | 26.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, F.; Zhu, X.; Zhou, Z.; Chu, J. A Hierarchical Mission Planning Method for Simultaneous Arrival of Multi-UAV Coalition. Appl. Sci. 2019, 9, 1986. https://doi.org/10.3390/app9101986
Yan F, Zhu X, Zhou Z, Chu J. A Hierarchical Mission Planning Method for Simultaneous Arrival of Multi-UAV Coalition. Applied Sciences. 2019; 9(10):1986. https://doi.org/10.3390/app9101986
Chicago/Turabian StyleYan, Fei, Xiaoping Zhu, Zhou Zhou, and Jing Chu. 2019. "A Hierarchical Mission Planning Method for Simultaneous Arrival of Multi-UAV Coalition" Applied Sciences 9, no. 10: 1986. https://doi.org/10.3390/app9101986
APA StyleYan, F., Zhu, X., Zhou, Z., & Chu, J. (2019). A Hierarchical Mission Planning Method for Simultaneous Arrival of Multi-UAV Coalition. Applied Sciences, 9(10), 1986. https://doi.org/10.3390/app9101986