Improved Student’s t-Based Unscented Filter and its Application to Trajectory Estimation for Maneuvering Target

Abstract
:1. Introduction
2. Preliminaries and Problem Statement
2.1. Problem Statement
2.2. Problem Statement
3. Main Results
4. Improved Student’s t-Based Unscented Filter
4.1. The Calculation of the Student’s t Integral
4.2. Improved Student’s t-Based Unscented Filter
5. Simulation
5.1. Case 1
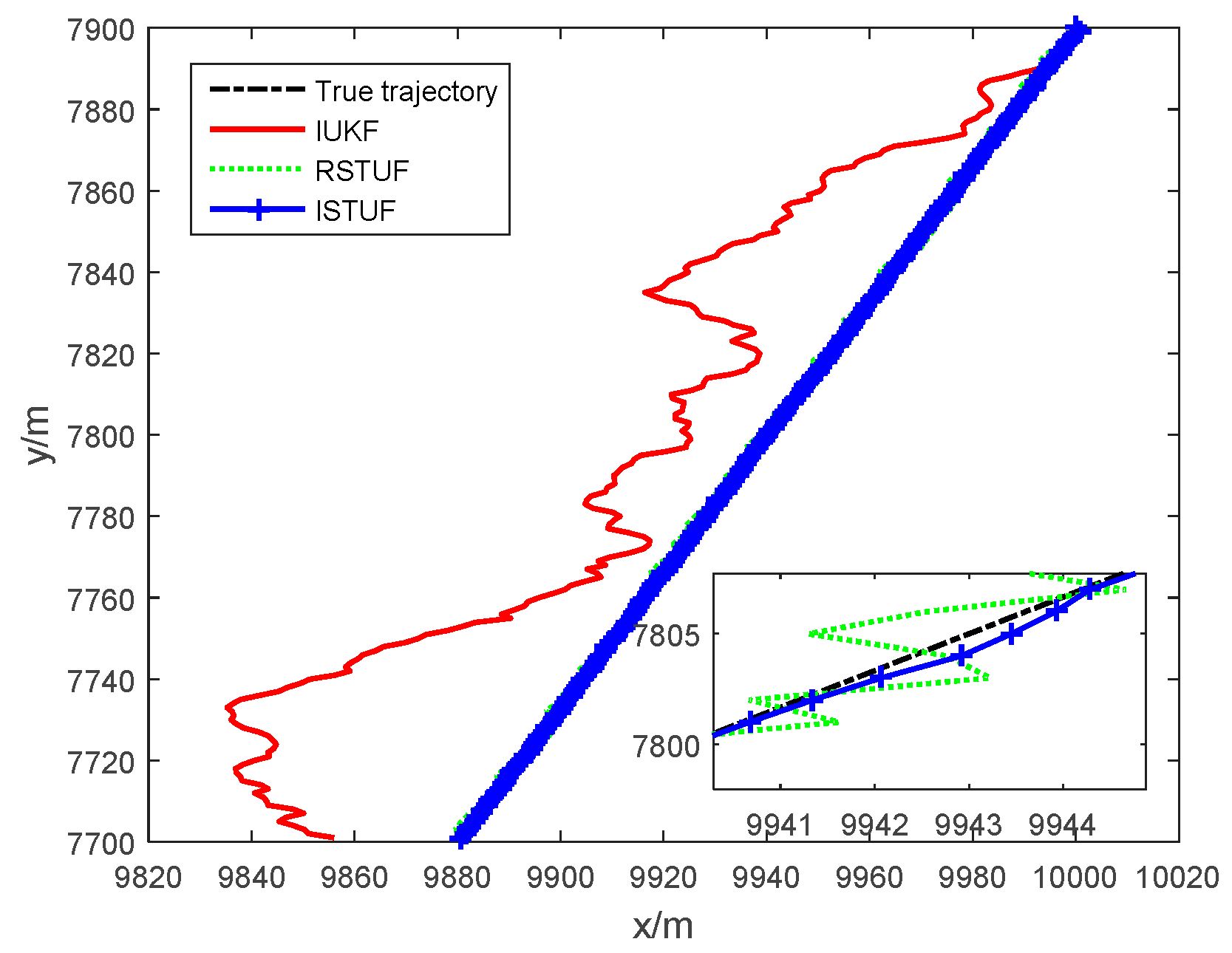
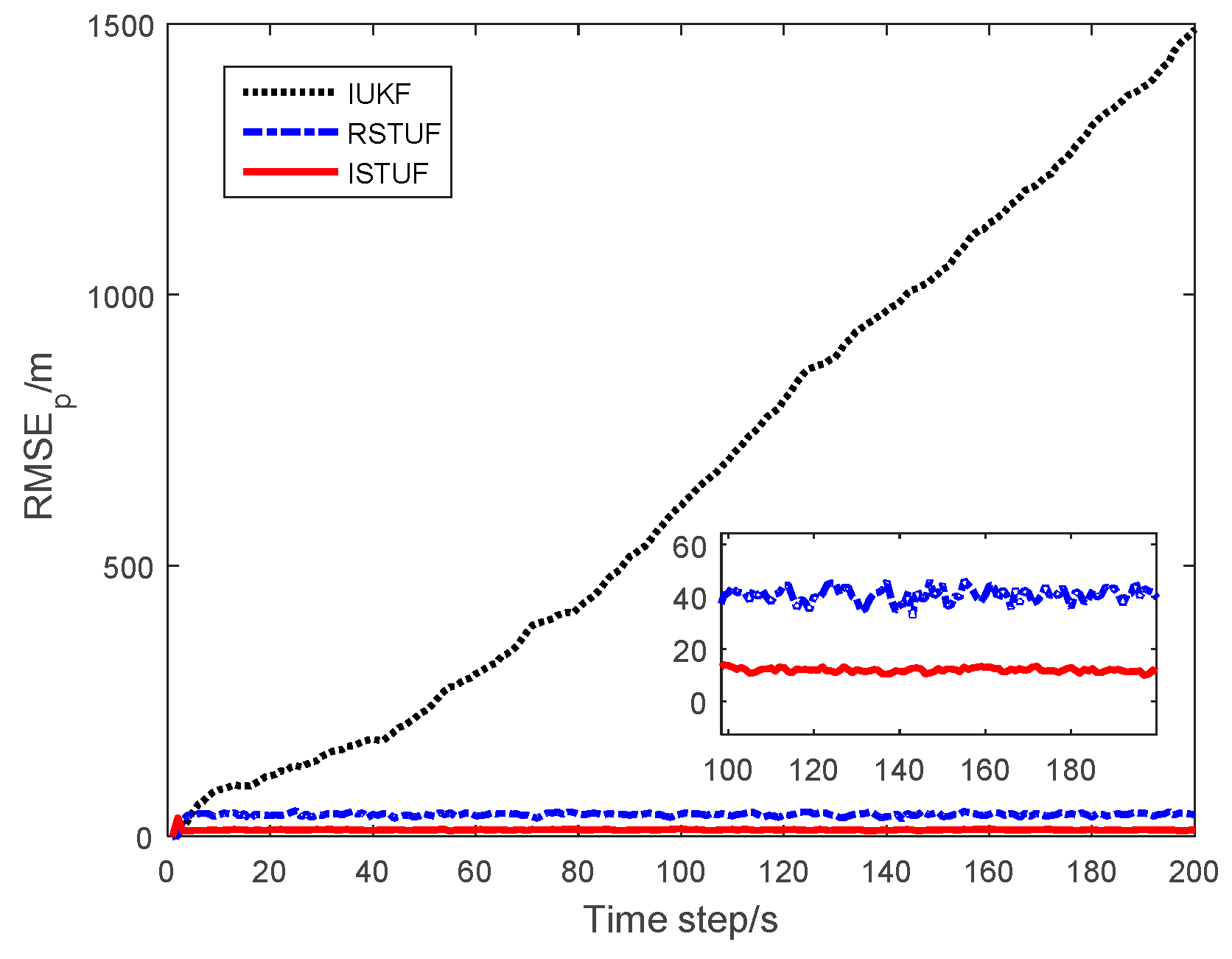
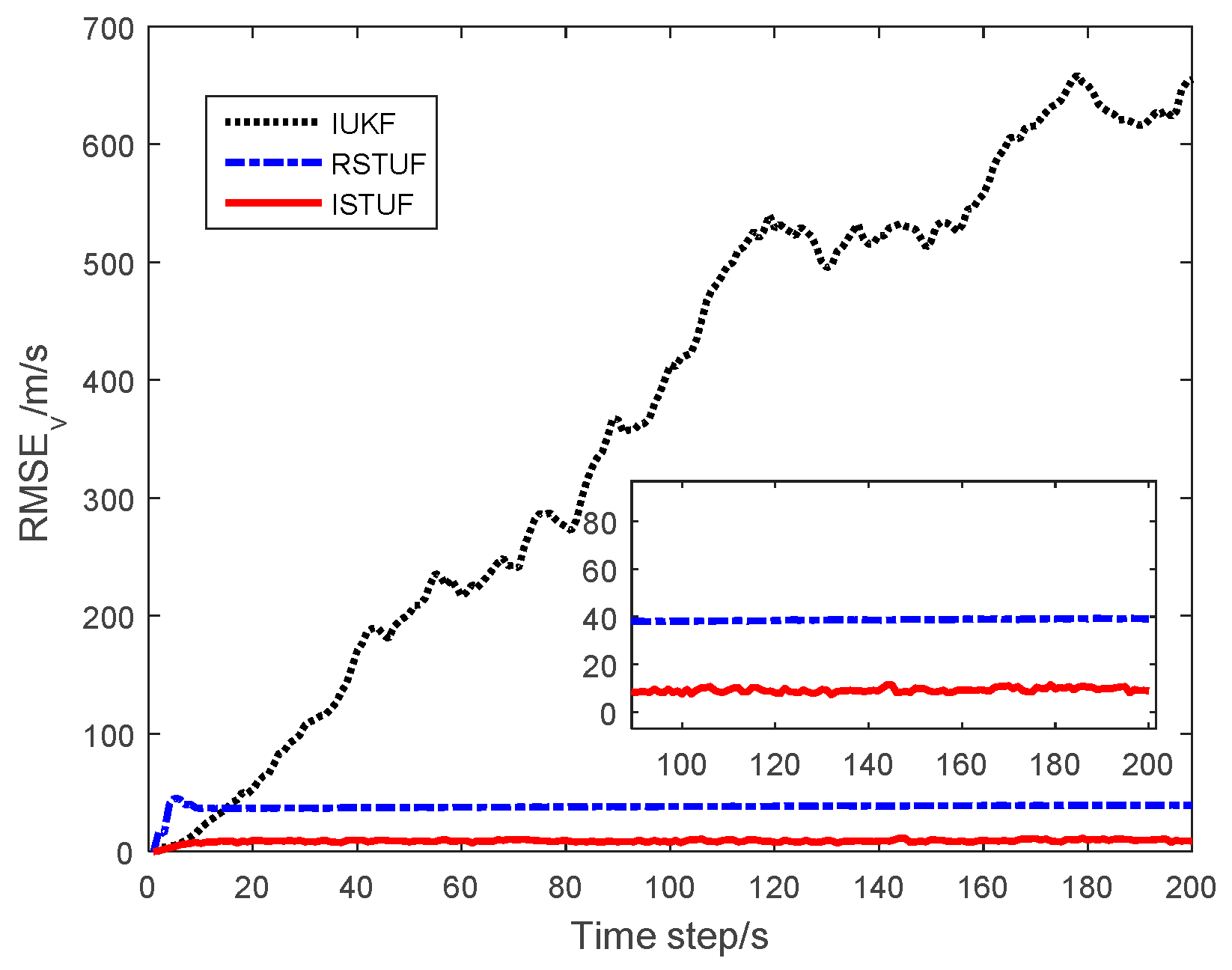
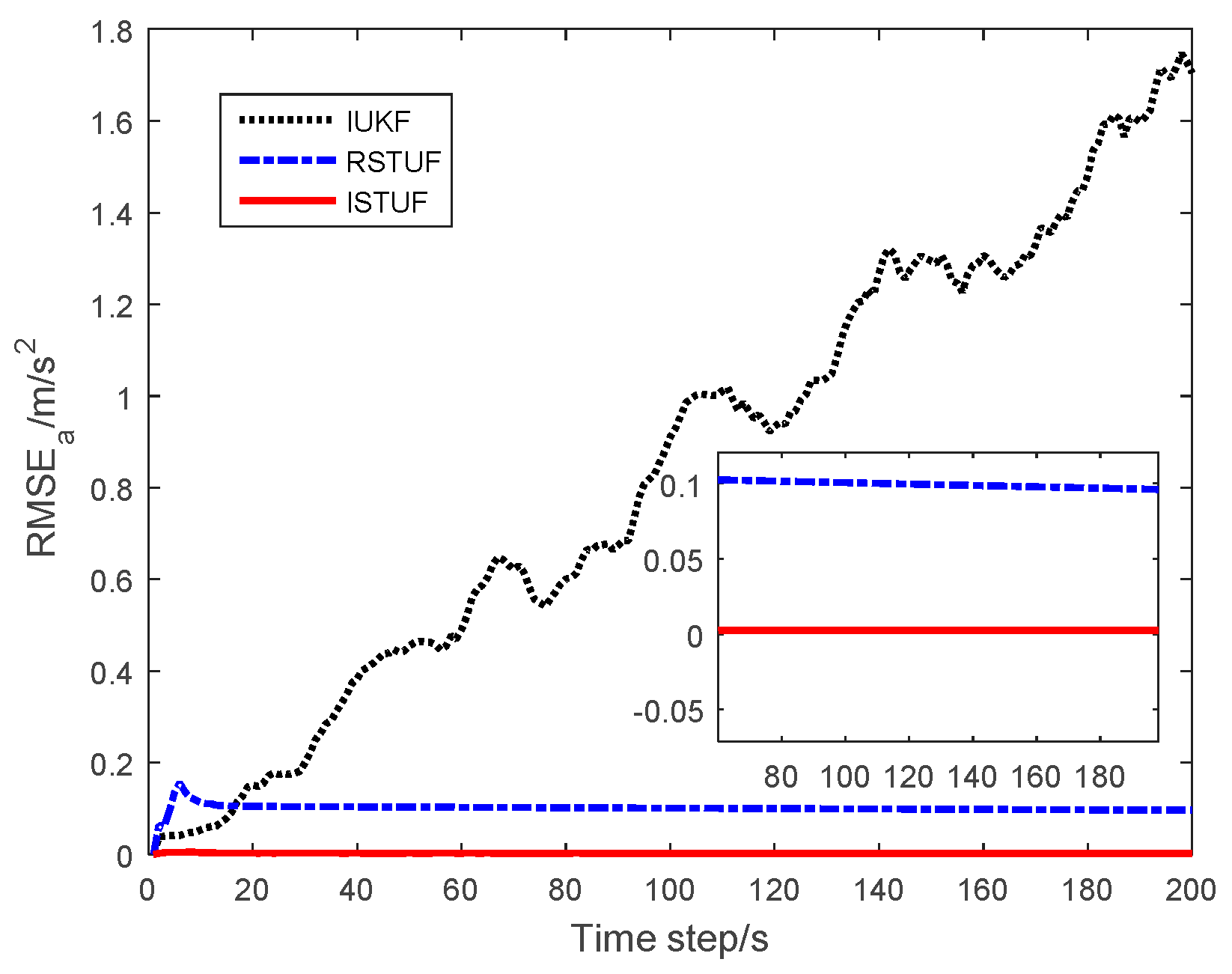
5.2. Case 2
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Karlgaard, C.D.; Schaub, H. Huber-Based Divided Difference Filtering. J. Guid. Control Dyn. 2012, 30, 885–891. [Google Scholar] [CrossRef]
- Chang, L.; Hu, B.; Chang, G.; Li, A. Huber-based novel robust unscented Kalman filter. IET Sci. Meas. Technol. 2012, 6, 502–509. [Google Scholar] [CrossRef]
- Chien-Hao, T.; Lin, S.F.; Dah-Jing, J. Robust Huber-Based Cubature Kalman Filter for GPS Navigation Processing. J. Navig. 2016, 70, 527–546. [Google Scholar] [Green Version]
- Deng, Z.; Yin, L.; Huo, B.; Xia, Y. Adaptive Robust Unscented Kalman Filter via Fading Factor and Maximum Correntropy Criterion. Sensors 2018, 18, 2406. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, W.; Sun, S.; Li, L. Robust Information Filter Based on Maximum Correntropy Criterion. J. Guid. Control Dyn. 2016, 39, 1–6. [Google Scholar] [CrossRef]
- Chen, B.; Liu, X.; Zhao, H.; Principe, J.C. Maximum correntropy Kalman filter. Automatica 2017, 76, 70–77. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Zhang, Y.; Li, N.; Wu, Z.; Chambers, J.A. A novel Robust student’s t-based Kalman filter. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1545–1554. [Google Scholar] [CrossRef]
- Gustafsson, F.; Gunnarsson, F.; Bergman, N.; Forssell, U.; Jansson, J.; Karlsson, R.; Nordlund, P.-J. Particle Filters for Positioning, Navigation and Tracking. IEEE Trans. Signal Process. 2002, 50, 425–437. [Google Scholar] [CrossRef]
- Míguez, J. Analysis of selection methods for cost-reference particle filtering with applications to maneuvering target tracking and dynamic optimization. Digit. Signal Process. 2007, 17, 787–807. [Google Scholar] [CrossRef]
- Zaitouny, A.; Stemler, T.; Algar, S.D. Optimal Shadowing Filter for a Positioning and Tracking Methodology with Limited Information. Sensors 2019, 19, 931. [Google Scholar] [CrossRef] [PubMed]
- Zaitouny, A.A.; Stemler, T.; Judd, K. Tracking Rigid Bodies Using Only Position Data: A Shadowing Filter Approach based on Newtonian Dynamics. Digit. Signal Process. 2017, 67, 81–90. [Google Scholar] [CrossRef]
- Judd, K. Tracking An Object with Unknown Accelerations Using A Shadowing Filter. arXiv 2015, arXiv:1502.07743. [Google Scholar]
- Huang, Y.; Zhang, Y.; Li, N.; Chambers, J. Robust Student’st based nonlinear filter and smoother. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2586–2596. [Google Scholar] [CrossRef]
- Roth, M.; Özkan, E.; Gustafsson, F. A Student’s t filter for heavy tailed process and measurement noise. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Brighton, UK, 12–17 May 2019; pp. 5770–5774. [Google Scholar]
- Huang, Y.; Zhang, Y. Robust student’s t-based stochastic cubature filter for nonlinear systems with heavy-tailed process and measurement noises. IEEE Access 2017, 5, 7964–7974. [Google Scholar] [CrossRef]
- Bryson, A.; Johansen, D. Linear filtering for time-varying systems using measurements containing colored noise. IEEE Trans. Autom. Control 1965, 10, 4–10. [Google Scholar] [CrossRef]
- Liu, W. State estimation of discrete-time systems with arbitrarily correlated noises. Int. J. Adapt. Control Signal Process. 2014, 28, 949–970. [Google Scholar] [CrossRef]
- Bryson, A., Jr.; Henrikson, L. Estimation using sampled data containing sequentially correlated noise. J. Spacecr. Rocket. 1968, 5, 662–665. [Google Scholar] [CrossRef]
- Petovello, M.G.; O’Keefe, K.; Lachapelle, G.; Cannon, M.E. Consideration of time-correlated errors in a Kalman filter applicable to GNSS. J. Geod. 2009, 83, 51–56. [Google Scholar] [CrossRef]
- Hermoso-Carazo, A.; Linares-Pérez, J. Unscented filtering algorithm using two-step randomly delayed observations in nonlinear systems. Appl. Math. Model. 2009, 33, 3705–3717. [Google Scholar] [CrossRef]
- Wang, X.; Liang, Y.; Pan, Q.; Zhao, C. Gaussian filter for nonlinear systems with one-step randomly delayed measurements. Automatica 2013, 49, 976–986. [Google Scholar] [CrossRef]
- Gu, Y.; Li, J.; Feng, D. State filtering and parameter estimation for linear systems with d-step state-delay. IET Signal Process. 2014, 8, 639–646. [Google Scholar] [CrossRef]
- Li, M.; Zhang, L.; Chu, D. Optimal Estimation for Systems with Multiplicative Noises, Random Delays and Multiple Packet Dropouts. IET Signal Process. 2016, 10, 880–887. [Google Scholar] [CrossRef]
- Geng, H.; Wang, Z.; Cheng, Y.; Alsaadi, F.E.; Dobaie, A.M. State estimation under non-Gaussian Lévy and time-correlated additive sensor noises: A modified Tobit Kalman filtering approach. Signal Process. 2019, 154, 120–128. [Google Scholar] [CrossRef]
- Ding, Z.; Liu, Y.; Liu, J.; Yu, K.; You, Y.; Jing, P.; He, Y. Adaptive Interacting Multiple Model Algorithm Based on Information-Weighted Consensus for Maneuvering Target Tracking. Sensors 2018, 18, 2012. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Problems | ISTUF | RSTUF |
|---|---|---|
| Dealing with STD noises | Use the Student’s t filtering framework | Use the Student’s t filtering framework |
| Dealing with time-correlated noises | Based on measurement differencing method, rewrite the noise function to time-irrelevant form. | no action |
| Dealing with the randomly delayed measurement | Expand the state vector with measurement noise, and consider the conditional PDF of the measurement noise. | no action |
| Calculating the Student’s t weighted integrals | Use the UT method | Use the UT method |
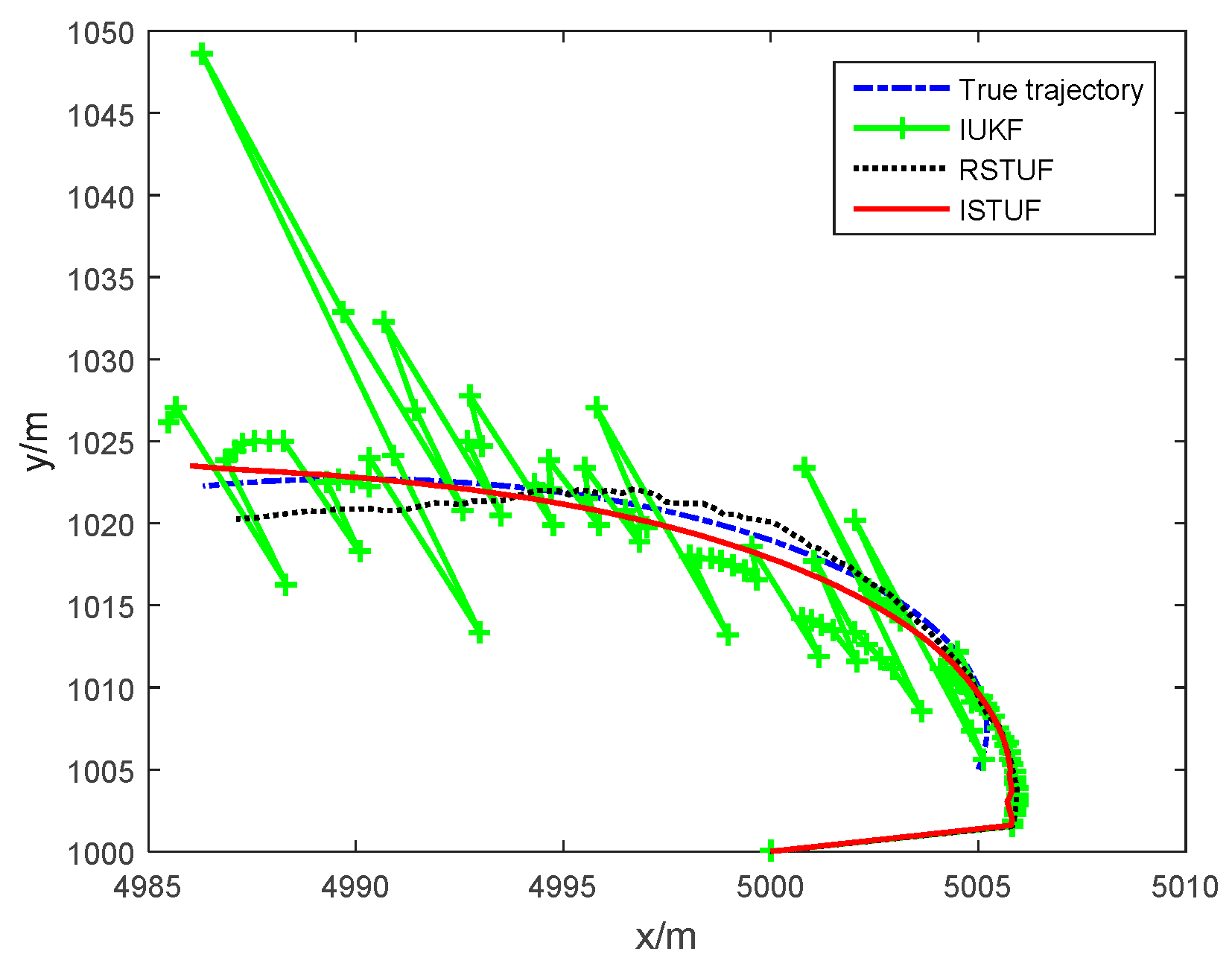
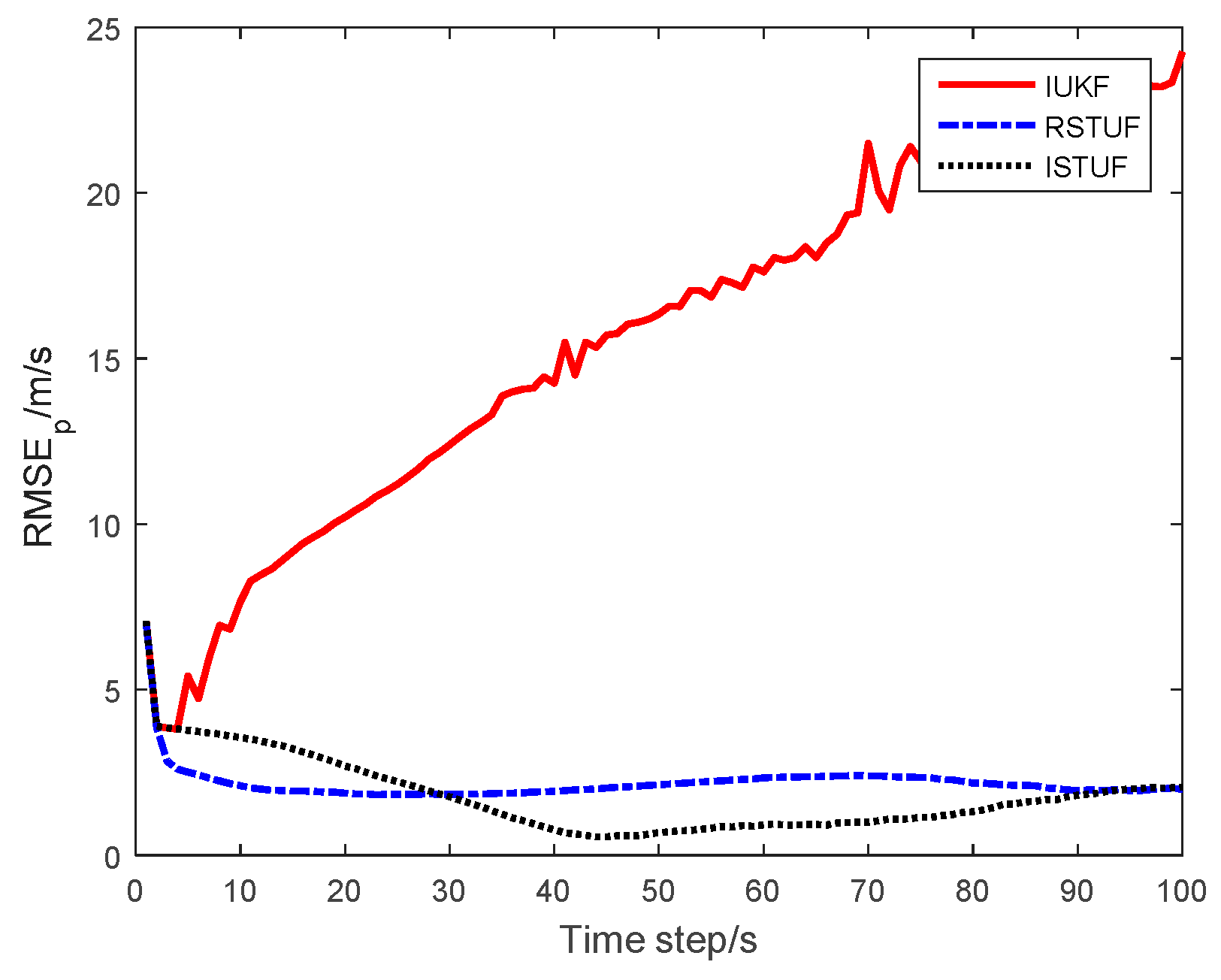
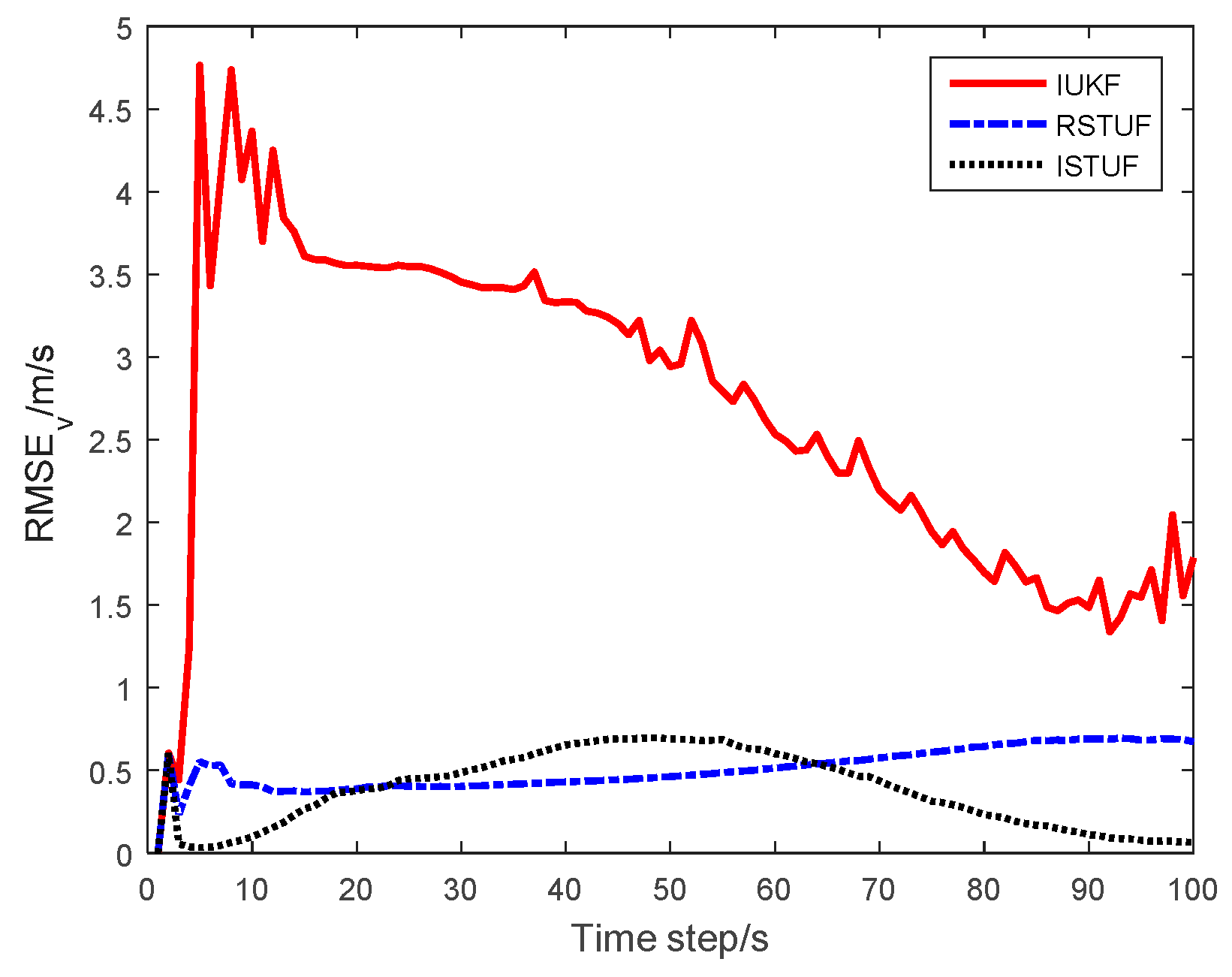
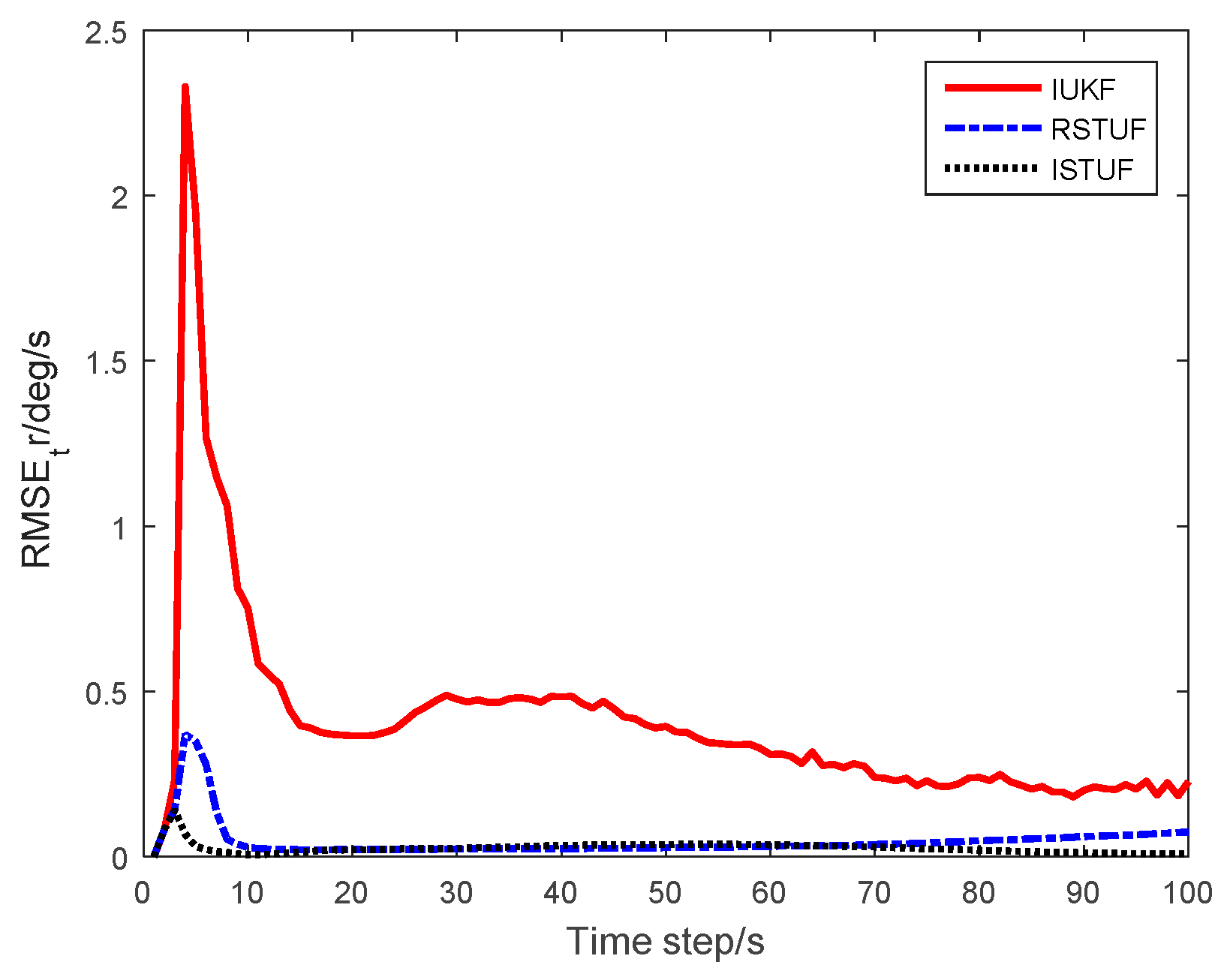
| Filters | ARMSE of Position | ARMSE of Velocity | ARMSE of Turn Rate | Time Consuming |
|---|---|---|---|---|
| IUKF | 14.779 m | 2.866 m/s | 0.607°/s | 0.0481 s |
| RSTUF | 2.342 m | 0.578 m/s | 0.051°/s | 0.0494 s |
| ISTUF | 1.841 m | 0.386 m/s | 0.027°/s | 0.0519 s |
| Filters | ARMSE of Position (m) | ARMSE of Velocity (m/s) | ARMSE of Acceleration (m/s2) |
|---|---|---|---|
| IUKF | 662.2783 | 327.1131 | 0. 9213 |
| RSTUF | 40.7887 | 37.7753 | 0.0748 |
| ISTUF | 12.1137 | 8.8290 | 0.0247 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Ma, K. Improved Student’s t-Based Unscented Filter and its Application to Trajectory Estimation for Maneuvering Target. Appl. Sci. 2019, 9, 2186. https://doi.org/10.3390/app9112186
Wu X, Ma K. Improved Student’s t-Based Unscented Filter and its Application to Trajectory Estimation for Maneuvering Target. Applied Sciences. 2019; 9(11):2186. https://doi.org/10.3390/app9112186
Chicago/Turabian StyleWu, Xiaohang, and Kemao Ma. 2019. "Improved Student’s t-Based Unscented Filter and its Application to Trajectory Estimation for Maneuvering Target" Applied Sciences 9, no. 11: 2186. https://doi.org/10.3390/app9112186
APA StyleWu, X., & Ma, K. (2019). Improved Student’s t-Based Unscented Filter and its Application to Trajectory Estimation for Maneuvering Target. Applied Sciences, 9(11), 2186. https://doi.org/10.3390/app9112186