1. Introduction
As one of the most complex and advanced industrial products at present, the automobile and its development represent the highest level of industrialization. Therefore, vehicle design quality reflects the design standard of a brand, company or even a nation. Considering the fierce competition in the vehicle market nowadays, besides engineering factors, the styling design is highly valued by manufacturers as it directly affects a vehicle’s market performance and brand competitiveness. The design flow of automobiles is complicated, lengthy and time consuming, and can be divided into several steps, such as proportional design, integral modeling design, detail design, post-adjustment and so on. In the traditional processes, the styling scheme is continuously adjusted according to feedback from other stages, which greatly reduces the design efficiency. Thus, helping automotive enterprises to achieve parametric design, modeling and production through the computer aided design (CAD) system, and constantly optimizing the CAD process to improve its design performance and efficiency has become the priority of CAD system developers and automobile enterprises; see [
1].
A vital application of CAD in the design industry is the establishment of parametric virtual geometry models, and various analyses, evaluations, adjustments, optimizations, and production management based on this in the conceptual design phase [
2]. For untouchable virtual geometry, its visual impact often comes from the characteristic lines or the intersection lines between surfaces. In the research from Gunpinar et al. [
3], modeling of eight products including a car hood and wheel rim was decomposed into geometric variation forms of vital characteristic lines, in which the positions of some characteristic points were adjusted constantly according to the particle tracing algorithm and the permutation genetic algorithm, in order to obtain a satisfactory final product shape. Bluntzer and Ostrosi et al. [
4] defined the shape styles through characteristic lines extracted from the automotive CAD models, and studied the relationship between the styling definition and the brand cultural background based on a theory of two hypotheses (singularities hypothesis and primitives hypothesis) and three design levels (style level, CAD level and emotional level). In their further research [
5], a series of related styling features was integrated into a style-holon to describe the internal evolution trend of brand characteristics. Guo et al. [
6] proposed a novel algorithm to automatically transform the CAD model into high quality mesh according to its shape feature line. Xiong et al. [
7] proposed that designers influence users’ psychological feelings through the representation of a product’s conceptual features. In research on the relationship between automobile 2D sketches and 3D CAD models, Cheutet et al. [
8] considered that some character lines (e.g., roof line, waist, overhangs of front of rear panel) play a role in dividing material areas or various curvature areas in shape design. More importantly, the lines were also believed to be symbols of design background and brand identity for consumers. The characteristic evaluation from Tian et al. [
9] on car type was also based on the projection curve of the feature line of the CAD model in the direction of three views. In addition to evaluating existing models, CAD models are also used to predict design trends and consumer demand. From the prediction of Kumar et al. [
10], the similar feature descriptions extracted from historical models could be used to predict the vehicle design trend. Cluzel et al. [
11] encoded automobile silhouettes connected by several feature lines to obtain their quantitative modeling feature data. In line with this idea, Hyun et al. [
12] proposed a new algorithm to extract feature lines from the body profile of each car in their further research, and calculated the similarities and differences among several models based on this line data.
The basis geometry theory of CAD technology is computer aided geometric design (CAGD), of which the classic tools and basic elements are parametric curves and surfaces. Bézier, B-spline and NUBRS, the major components among them, were proposed decades ago and are widely used in all kinds of general-purpose CAD software. However, in recent years, these traditional curves or surfaces struggle to meet the practical requirements in the design or engineering field [
13]. This is because the shape cannot be adjusted by additional parameters except the control points, or they cannot accurately represent conic curves and surfaces, or the calculation is cumbersome. Therefore, in order to overcome these problems, researchers have proposed many novel parameterized Bézier-like curves and surfaces, and constantly expanded their application prospects. Shen et al. [
14] proposed a new transformation algorithm to define the C-Bézier curve with one shape parameter introduced as a separated form including a Bézier part and a trigonometric part, in order to represent some regular curves such as a cycloid or traditional Bézier curve by the C-Bézier curve. By introducing two shape parameters, Han et al. [
15] constructed a cubic trigonometric Bézier (T-Bézier) curve based on a cubic Bézier curve, which has strong geometric properties and could exactly represent ellipses. Hu et al. [
13] presented a shape-adjustable generalized Bézier (SG-Bézier) curve and surface with global and local shape parameters by extending classical Bernstein basis functions. In their subsequent research [
16], they studied in depth the multiple geometric properties of the SG-Bézier curve, which includes the conditions for continuity between two curves, the method to smooth two curves, and the influence of shape parameters on curve form. Adjusting Beta function, Chu et al. [
17] proposed a scheme for generating new types of curves and triangular patches, in which shape parameters are introduced on the basis of preserving the correlation characteristics of the Bézier curve and surface, and this improves the flexibility of its application. Qin et al. [
18] extended the CE-Bézier surface
, a previously proposed bicubic surface with better flexibility, shape adjustability and approximation, to degree m*n, which is termed the GE-Bézier surface. Furthermore, to solve the problem of whether the shape parameters change after the segmentation of the CE-Bézier curve, Zhang [
19] conducted a thorough study and proposed two different segmentation algorithms.
However, all the parameterized Bézier-like surfaces mentioned above have a common disadvantage in the actual product design process, that is, the boundaries of these surfaces are also deformed and affected by shape parameters and cannot be interpolated on their initial boundary curves. Therefore, the designer cannot adjust the surface shape while maintaining the boundary shape, and vice versa, which is against the goal of efficient design. In the CAGD field, another vital surface, Coons surface, has the advantage of overcoming this defect. Coons surface was proposed as early as the mid-1960s, and its characteristic is that the surface shape is defined by boundary curves and related parameters. There are two types of Coons surface. The first type is bilinearly blended Coons patch, in which the shape is completely interpolated into its four boundaries and cannot be adjusted. The construction of this surface is the superposition of three surfaces, in which the first and second are ruled surfaces in different directions, and the third is a bilinear tensor product surface. The second type is bicubically blended Coons, which is based on the first type and interpolates the cross-boundary derivatives in addition to the boundaries, by adding a set of blending functions. Similar to various Bézier-like surfaces, scholars introduced shape parameters to improve the modelling adjustability of the second type of Coons patch. Introducing trigonometric Hermite basis functions, Xie et al. [
20] made Coons surfaces of the second type adjustable under the action of two shape parameters. Analogously, Wang et al. [
21], Pei et al. [
22] and Zou [
23] replaced the blending function in the second type of Coons patch with a second-order trigonometric blending function, a blending function with shape parameter
λ, and a RBF-Hermit function, respectively, to make the patch shape modifiable. Nevertheless, these two types have their own disadvantages in free-form surface modeling. The first type of Coons cannot be further modified finely, and is only suitable for simple modeling. For the second type, including its various variants’ shape parameters, the compatibility conditions of the cross-boundary derivatives are very stringent, and it is also difficult to obtain the data directly in design practice [
24]. This represents a primary issue that this study aims to resolve.
Automobile modeling comprises not only aesthetic features, but also aerodynamic ability. The traditional method of measuring the air drag coefficient is the wind-tunnel test. In the 1980s, the Motor Industry Research Association from the UK established the MIRA car model, which can be decomposed into more than ten surfaces connected by rounded corners, and used it as a standard model for tunnel testing. However, because of the high cost of the tunnel test, computational fluid dynamics (CFD) simulation is more widely used in the conceptual design stage of vehicle models, in which the virtual CAD model reproduces the basic fluid dynamics features of real cars in CFD simulation software and becomes the major test object to communicate between the designer’s scheme and CFD technology. Hsu et al. [
25] proposed a new boundary representation method of the CAD model, which is more suitable for mesh generation in CFD preprocessing. Chowdhury et al. [
26] built a bioinspired CAD car model to take advantage of the efficient movement of boxfish in water due to its streamline features. The shape of this model is unified and integral, and its characteristic lines consist of the intersection of several subsurfaces. In the long-term research of Cheng et al. [
27,
28,
29], they built various CAD car body models with different complexity to explore the influence of A-pillar and C-pillar of automobiles of different shape (rounded or angular) on driving pitching stability. In their research in 2014 [
29], they used the large eddy simulation method on two CAD models with full details; they drew the conclusion that the vortex shed from the A-pillar edge results in a destabilizing tendency while the vortex shed from the C-pillar edge results in a stabilizing tendency. Hassan et al. [
30] reduced the drag coefficient by nearly 10% by optimizing the angle of departure and the shape of the Rear body diffuser in a racing car CAD model. In the study from Chen et al. [
31] on the influence of various eddy viscosity turbulence models on the CFD simulations of a particular racing car type, they also pointed out that the shape of some specific surfaces (i.e., backlight-decklid junction, spoiler base, roof rails, shark-fin) would affect the results of CFD simulation. In the comparison between the large eddy simulation model and the wall-modeled large eddy simulation model from Aljure et al. [
32], a realistic generic car body CAD model according to the styling of the Audi A4 and the BMW 3 series was adopted. In this research, they pointed out that only the true and accurate CAD models could fully reproduce the real aerodynamic behavior present in automotive geometries. However, this research also held the idea that making use of simplified bodies is the most efficient tool to study fundamental aerodynamic processes and focus on specific features of automotive aerodynamics for the tester. Therefore, in their other studies [
33,
34], Aljure et al. utilized the CAD model with different degrees of simplification to assess various LES models and to simulate the airflow around the wheels. In the research of Islam et al. [
35], a virtual model stretched from 2D graphics was simulated in CFD to modify the statistical methods. To improve the Delayed Detached-Eddy Simulation algorithm, Ashton et al. [
36] used a simplified car model consisting of all plane surfaces, and the CFD result showed that the simplified CAD model can still qualitatively express the influence of surface slope and dimension on CFD simulation. However, in all the studies and CFD simulations above, the CAD models are not parametric shape-adjustable, which means that the shape optimization process would be inefficient. And this would be another key problem for this research.
To analyze these references above, the following summaries could be made:
(1) Car modeling could be defined by CAD model, and its style characteristics could be adjusted by the parameters in the models. As the most important aesthetic component, feature lines have an important impact on vehicle modeling.
(2) Various Bézier-like surfaces have strong adjustability, however, the non-interpolation at boundaries and too many control parameters (control points) would render difficult the application to the shape design of cars.
(3) Originally, all Coons surfaces and Coons-like surfaces could be classified as the first and second type of Coons surface (described above). They are all suitable for shape design because their shape could be controlled directly by the boundary curves. The shape of the first surface type is determined only by the boundary curves because, in the car’s shape design, the feature lines could be taken as the boundary curves. Considering the compatibility conditions of boundaries, the second surface type increases the flexibility of regulation, but it is difficult to generate for its mathematical definition.
(4) The existing literature supports that the simplified automotive body model could be used for qualitative CFD analysis and also reflect the flow characteristics of airflow on the car body.
In response to the current challenges, this paper attempts to create a vehicle CAD model template based on feature lines, which are extracted from dozens of commercially available car models. All the surfaces in the template are novel type with adjustable shapes under the simplest construction conditions (only interpolating at the boundary). Through these measures, a multi-level design method and adjustment to the appearance of the car model is proposed. By considering the result of CFD from the CAD model template, a set of theoretical methods to optimize the body shape is finally established.
This paper is organized as follows. The definition and properties of the new type of surface are described in
Section 2. In
Section 3, we build a simplified vehicle model template, and present the adjustment mode and the shape parameter constraints. In
Section 4, the hood surface of the template with the new surface is optimized in CFD. Some brief conclusions are given in
Section 5.
4. Modeling Optimization
In CFD feedback and optimization processes of automobile design, the model template and the SQ-Coons surface have two design levels. The first is that designers determine the overall shape of the car through the model template and the control points in it. The other is that shape parameters are used as variables to optimize vehicle aerodynamic coefficients while maintaining the overall car shape. In addition, due to the differences, each surface has its own optimal combination of shape parameters.
The hood surface of model M0 is taken as an example in this section. M0 is the common template from the analysis and statistics of dozens of existing vehicle models, and is also the initial template for obtaining more models by changing parameters. It has the same topological relationship of surface stitching as other models. Therefore, the optimization ideas implemented on it can also be applied to other models.
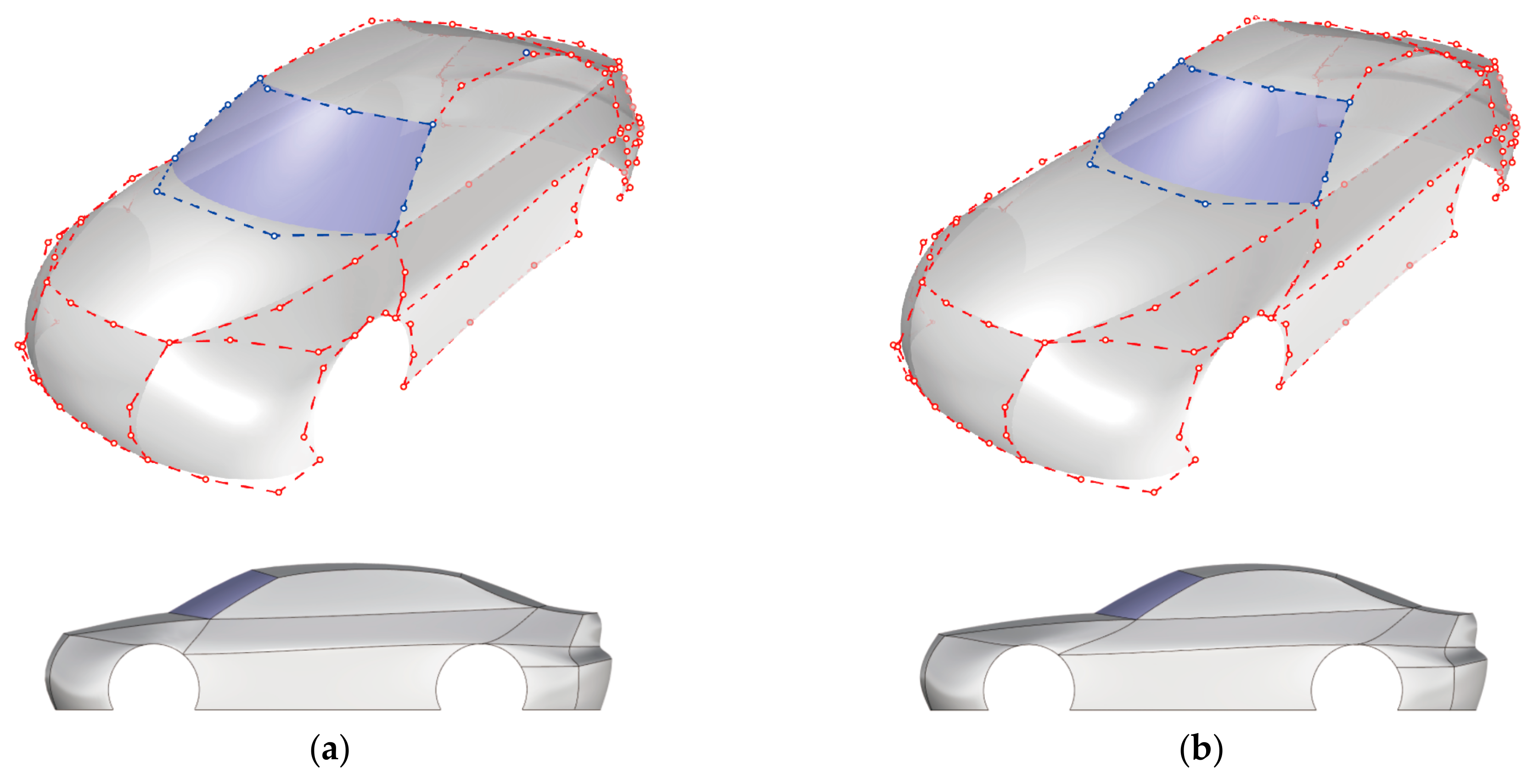
In the following optimization process, all the control points (the integral car modeling) of the hood surface in M0 are kept unchanged while the shape parameters (surface details) of the hood surface are optimized as variables for its CFD result. The coordinates of 12 control points on the four boundaries and the
u and
v directions of the hood surface are illustrated in
Table 2 and
Figure 12, respectively.
In the outflow field simulation of an automobile in CFD, the model is required to be closed. As the model template is composed of only 25 unclosed surfaces, five planes, including four nearly circular planes at the wheels and a large plane at the chassis, need to be generated to enclose the whole body.
The next step of CFD pretreatment is the generation of a computational grid, which is carried out in Gambit 2.4.6. The shape of the computational domain resembled a rectangular wind-tunnel test section. Its cross section covered 5 times the length upstream and 10 times the length downstream of the CAD vehicle model, 4 times the width on both left and right sides, and the height was 5 times the height of the model. The corresponding blockage ratio was about 1.12% according to our measurements, which is within the scope of 5% in typically accepted automobile aerodynamic testing (see [
29]). The triangle mesh was set as 10 mm, and the hybrid tetrahedron was 10–200 mm. In addition, five layers of prism mesh were generated from the surface of the automobile model, and the thickness of the first layer was set as 8 mm. The two steps of the CFD pretreatment processes of the whole vehicle are shown in
Figure 13.
To obtain the total pressure
D in the upwind direction of the models, Ansys Fluent 16.2 and the
k–ε turbulence model are used for aerodynamic computations. The drag coefficient
Cd could be calculated according to:
where
ρ is air density,
v is vehicle speed (100 km/h), and
A is the vehicle projection area in the windward direction. Since the adjustment of shape parameters only modifies the surface details,
A,
ρ and
v remain unchanged, and the value of
Cd is only related to
D.
In this paper, the application of shape parameters in the optimization of the vehicle drag coefficient Cd will be explained in the order of one, two and three variables, respectively. In order to simplify the calculation, the variation range of shape parameters would be accurate to 0.5. As a contrast, the Cd of the original M0 model (the αu, γu, αv, and γv of the hood surface are all valued as 1) is 28.40% from the CFD simulation.
When only
αu is used as a variable, according to CFD simulation, calculation and statistics, under the condition of keeping
γu,
αv and
γv unchanged and valued as 1, the value curve of
Cd caused by
αu ∈ 1 ± 5 is shown in
Figure 14. According to the algorithm for determining the range of shape parameters in
Section 3.3, the curvature meets the requirement only when
αu ∈ [−1.5, 2], which is marked as the red area. It could be concluded that
Cd takes the optimal value 28.14% when
αu is −1.5.
When
αu and
γu are taken as variables, the value surface of
Cd with
αu,
γu ∈ 1 ± 5 is displayed in
Figure 15. The ranges of
αu and
γu that meet the curvature requirements are [−1.5, 2] and [−1.5, 2.5], respectively. There are 64 parameter sets suitable for CFD simulation in these ranges, since some parameter sets at the limit (e.g.,
αu = −1.5 and
γu = −1.5) do not meet the requirements. It could be concluded that
Cd takes the optimal value 27.85% when
αu = −1 and
γu = −1.5.
As the hood surface is left–right symmetrical, the values of
αv and
γv are the same as they control the deformation of the surface in the left and right directions, respectively. Therefore, only three shape parameters at most could be optimized as variables on the hood surface. The range of
αv (
γv) that meets the curvature requirements is [−0.5, 5]. Since some parameter sets at the limit (e.g.,
αu = −1.5,
γu = −1.5 and
αv =
γv = −0.5) do not meet the requirements, finally, there are 754 parameter sets suitable for CFD simulation in these ranges. The value of
Cd in this range is illustrated in
Figure 16. It could be concluded that
Cd takes the optimal value 27.72% at
αu = −1.5,
γu = −0.5,
αv =
γv = 0.
For those surfaces which are not on the symmetrical plane, all four shape parameters should be used as variables to optimize the Cd. Its optimization method is similar to that mentioned above.
Figure 17 depicts the mean curvatures of the original hood surface and optimized surface. For this particular surface, with the four unchanged boundary curves and the four decreasing shape parameters, the mean curvature of the surface tends to be the same as that of the whole surface, but there is also a significant sudden change at the front end. CFD simulation confirms that such a change is beneficial to its aerodynamic performance.
For the other models M1–M50, the topological relationship between surfaces is the same as M0. Therefore, this method can also be applied to it, even though they have different boundary curve shapes. The influence (on both curvature and Cd) of shape parameters on different surfaces is not the same, and it should be analyzed and optimized separately according to their modelling characteristics, which cannot be simply generalized.
In conclusion, for model M0, the optimization on Cd could be carried out using one, two or three shape parameters as the variables, and the absolute value could be reduced by 0.68% when three variables were finally adopted. All the optimizations are carried out under the condition that the curvature of the surface meets the requirements, which means that surface modeling always keeps its initial trend without excessive modification. Therefore, it could be concluded that the shape parameters could affect the aerodynamic characteristics of the vehicle by controlling the surface modelling, and the optimization method could also ensure that both the shape and the Cd meet the needs of designers.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}