A Two-Stage Gradient Ascent-Based Superpixel Framework for Adaptive Segmentation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Conventional Gradient Ascent Method
2.1. SLIC Superpixel Method
- The expected superpixel number is assigned manually to determine the grid interval , where is the pixel number of the Lab image to be partitioned;
- initial cluster centers are initialized on the uniform grid in the image plane and represented as a feature vector , where is composed of in color space and in 2-dimensional space position;
- Each pixel is assigned a label in accordance with the nearest cluster center based on a distance measure aswhere is a default factor in [15] to normalize color and spatial proximity, and represents the Euclidean distance;
- A local k-means method is adopted to adjust the center and the labels of pixels in every region. This procedure goes until all pixels get new labels and all centers update to aswhere means the cluster centered at , and is the number of pixels in . This step is iterated until it reaches a predefined global termination;
- The isolated fragments are merged to a final superpixel by region growing method, where indicates a small region unconnected to its cluster but eventually relabeled the same as , so that the connectivity among superpixels can be enforced.
2.2. Marker-Controlled Watershed Segmentation
3. Proposed Two-Stage Adaptive Image Segmentation Framework
3.1. Speeded-Up simple Linear Iterative Clustering
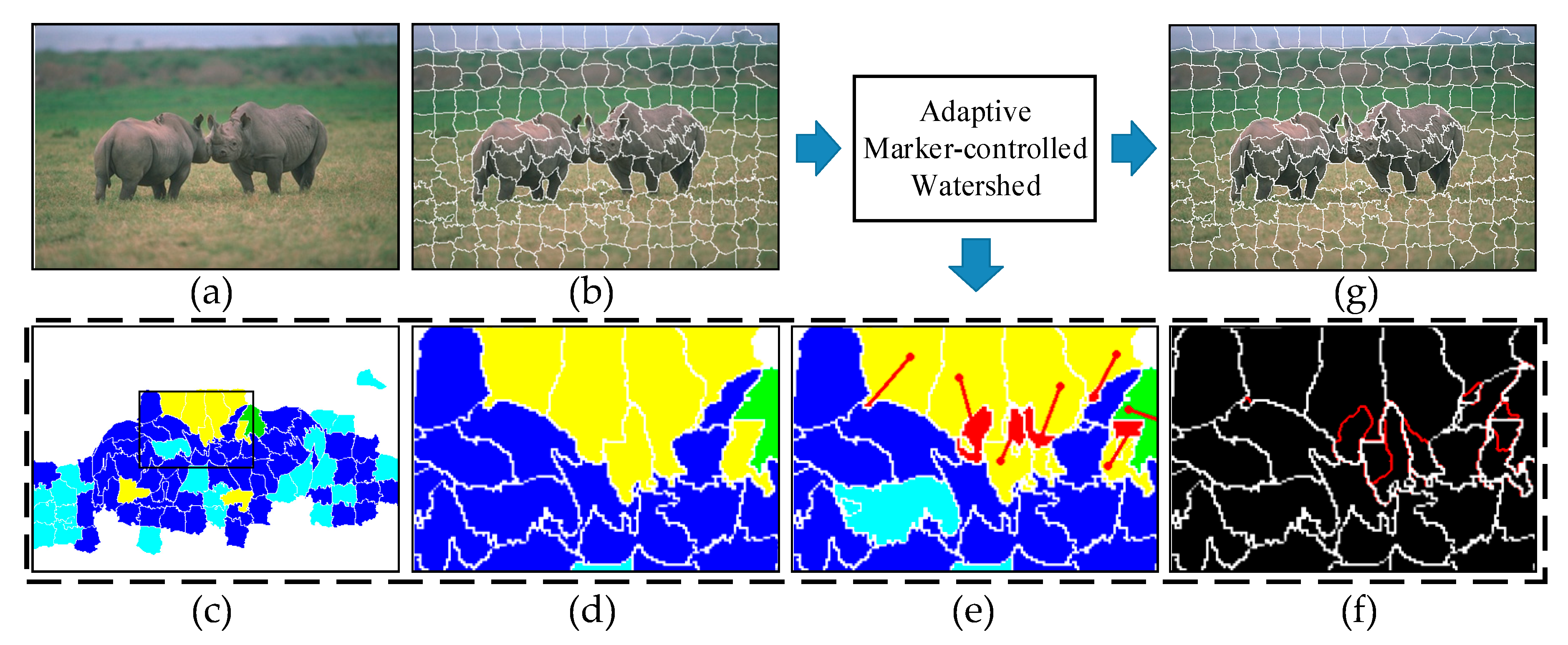
3.2. Adaptive Marker-Controlled Watershed Subdivision
- If a superpixel is still simply connected without merging neighboring isolated regions (in Figure 2c, they are filled with blue and green), namely , the inner difference in Lab color space can be calculated by:where and are a pair of pixels with the minimum and maximum distances from cluster center respectively. The superpixel is considered heterogeneous if:
- If a superpixel merges neighboring isolated regions (cyan and yellow parts in Figure 2c), the mean value of Lab color space is obtained as a region vector to the neighboring region . The sum of inner difference between and each is computed for determining the heterogeneity of if
3.3. Coarse-to-Fine Segmentation Framework
| Algorithm 1: The proposed coarse-to-fine segmentation framework |
| Input: the Lab image I, the expected superpixel number k |
| /* Initialization */ |
| Initialize cluster centers and assign starting labels similar as conventional SLIC. |
| /* sSLIC Coarse Segmentation */ |
| if 1st iteration then |
| set spatial offset for each cluster center |
| set iteration time for each cluster center |
| else |
| repeat |
| for each cluster center do |
| Compute . |
| if then |
| skip calculating pixels in the cluster centered at |
| end if |
| Assign and update superpixel the same as conventional SLIC. |
| . |
| end for |
| until or all pixels are skipped |
| end if |
| /* Adaptive Marker-controlled Watershed Finer Subdivision */ |
| for each sSLIC superpixel do |
| if then |
| compute markers by the homogeneity criterion |
| run marker-controlled watershed algorithm in the superpixel region |
| end if |
| end for |
4. Experiment and Analysis
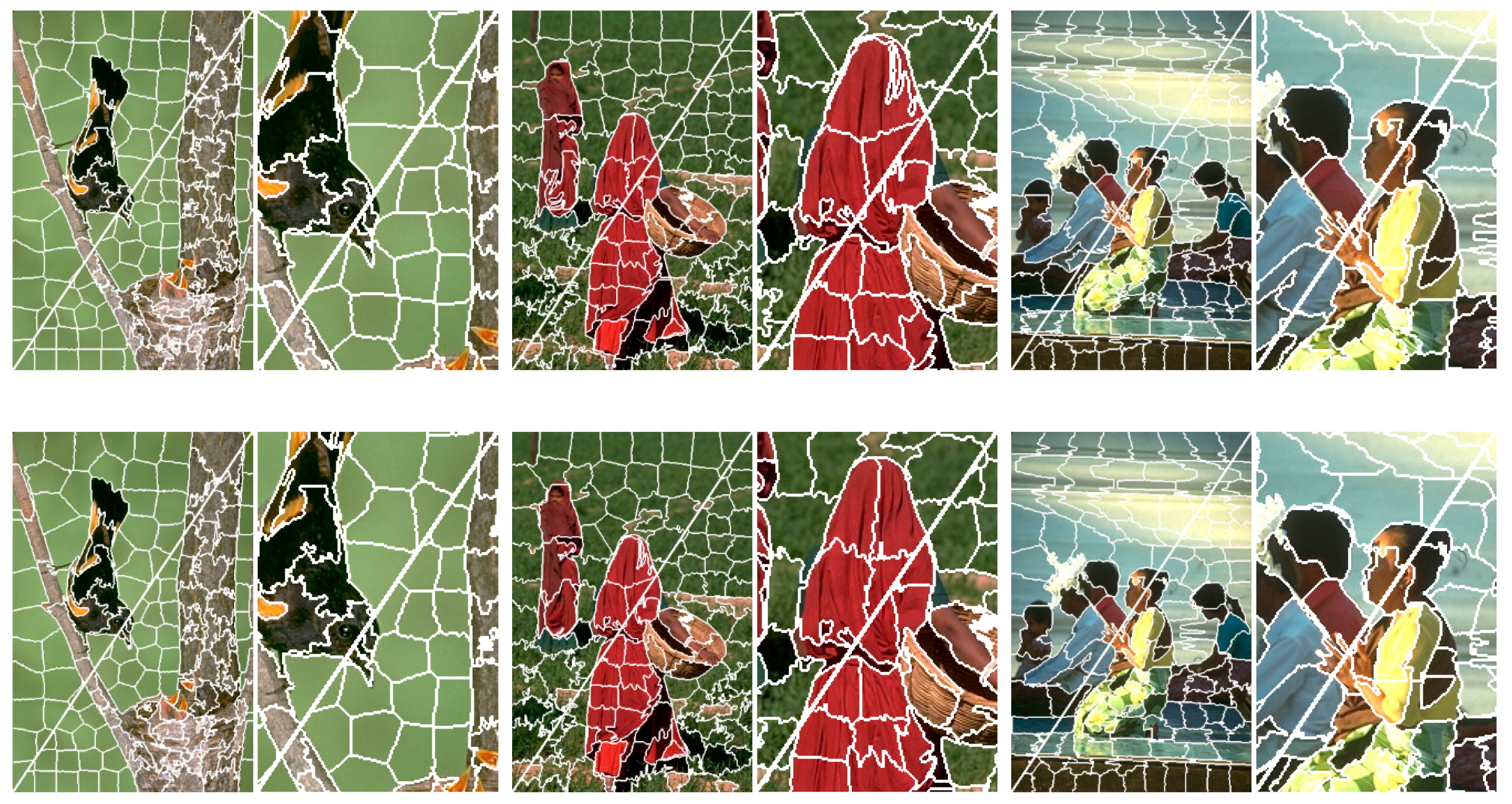
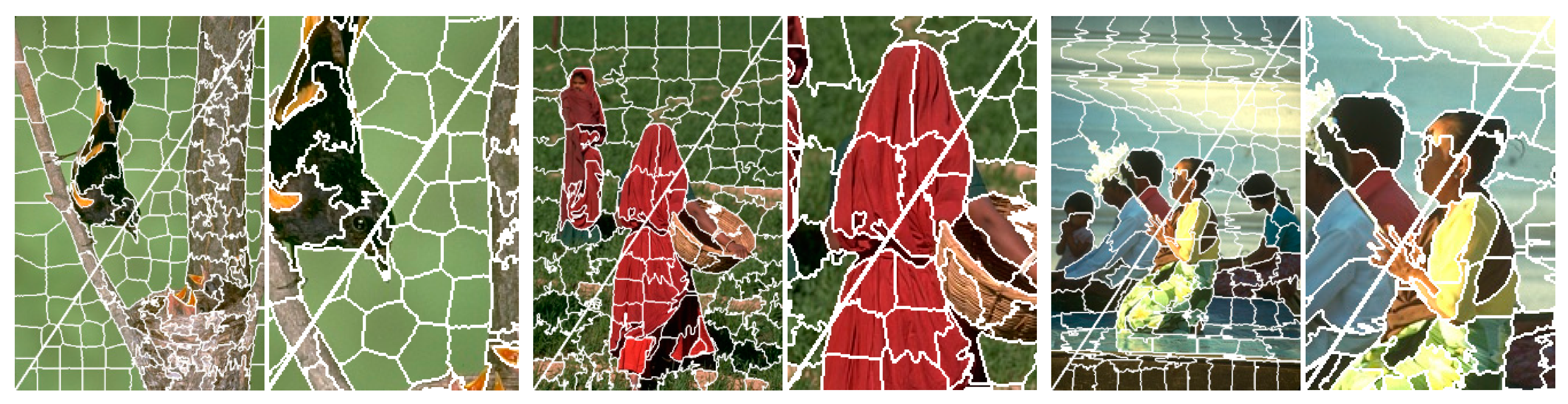
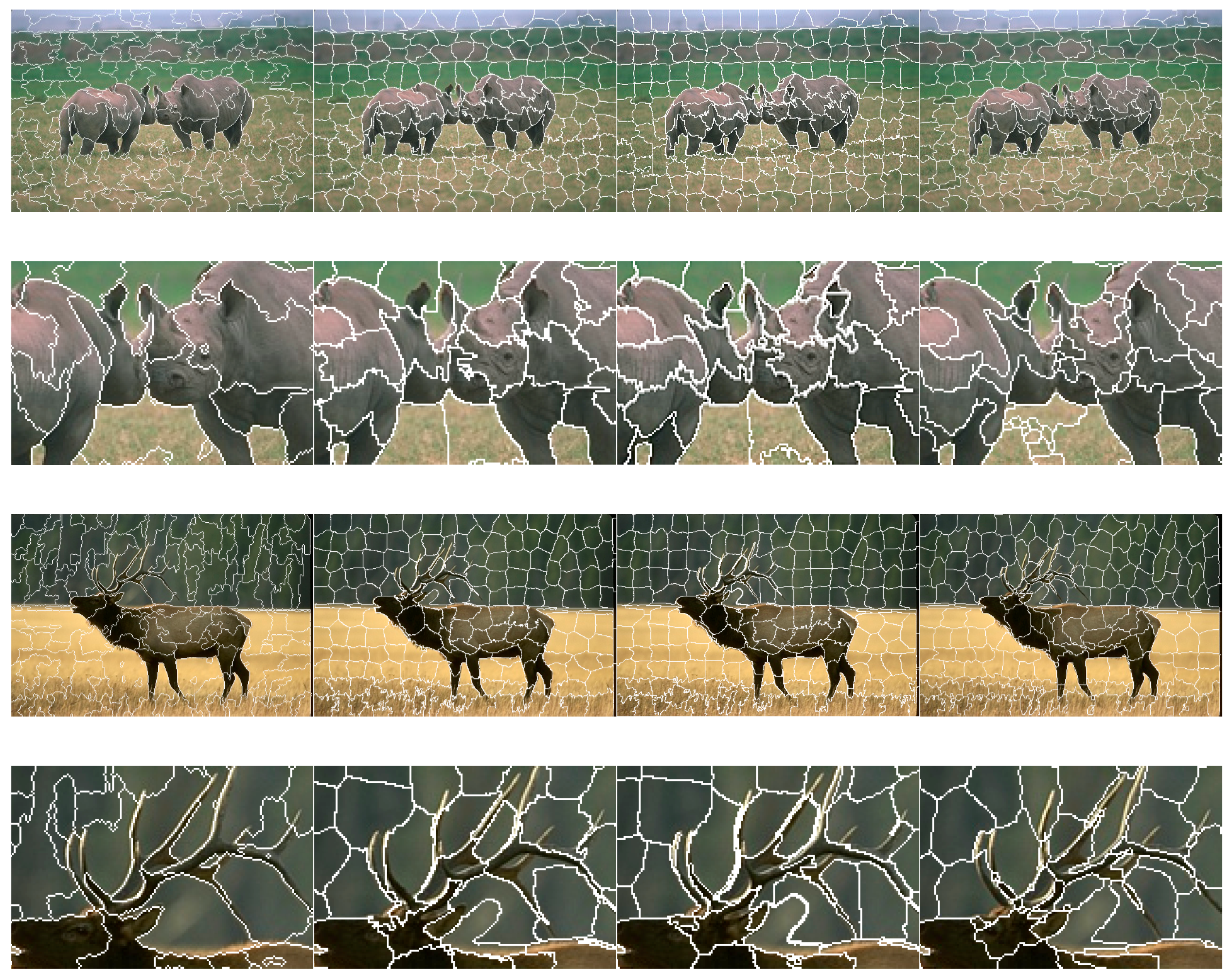
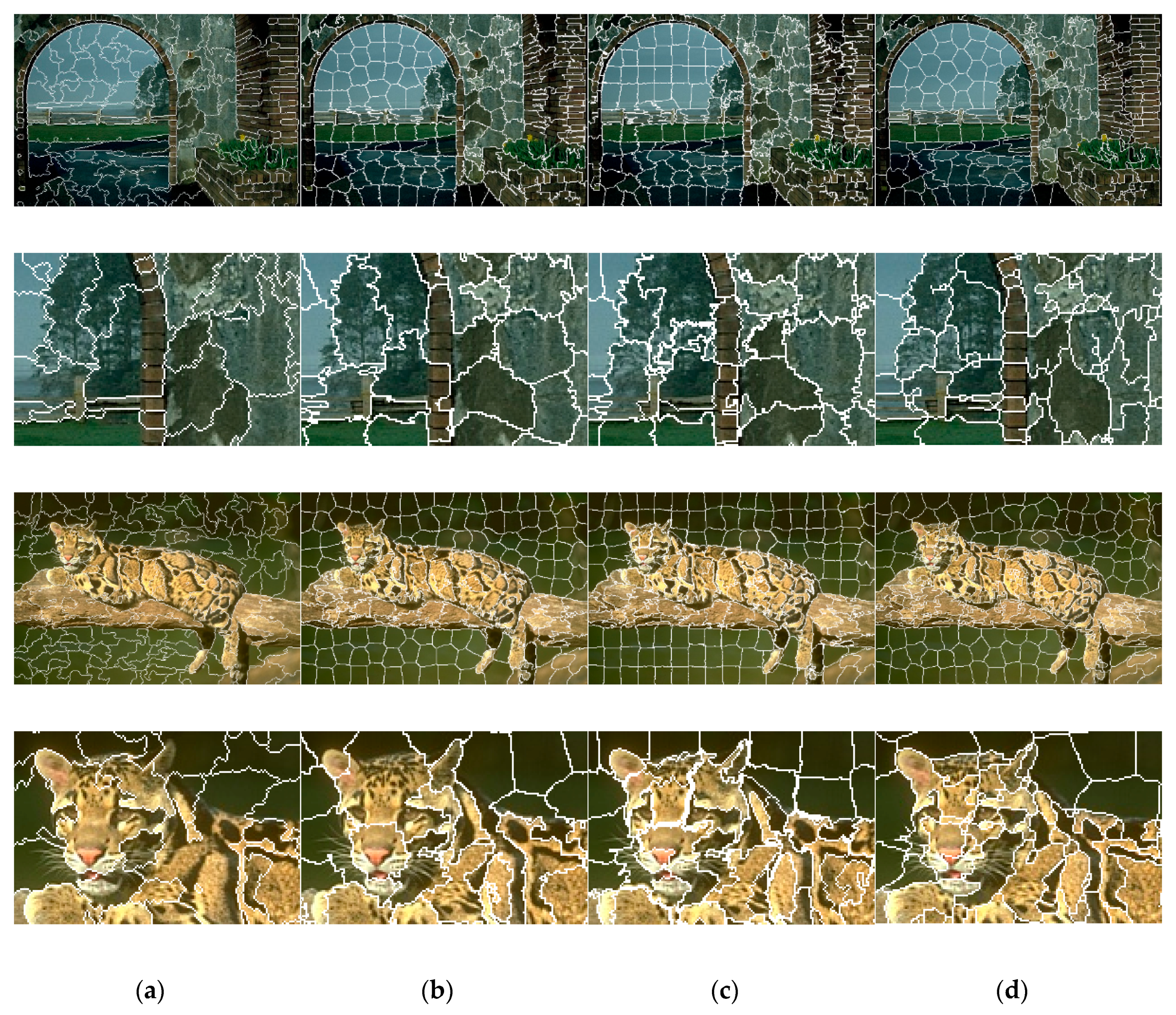
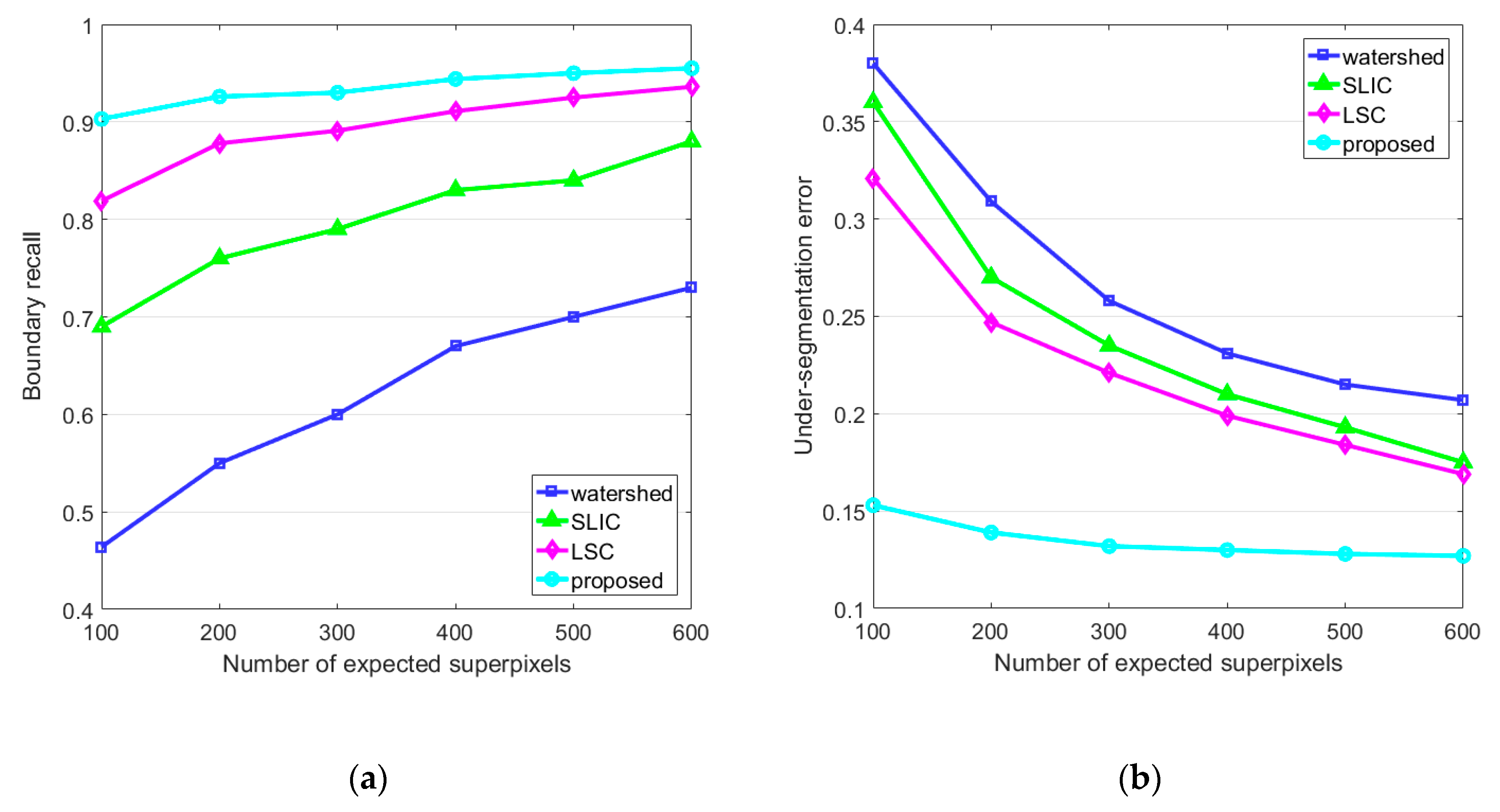
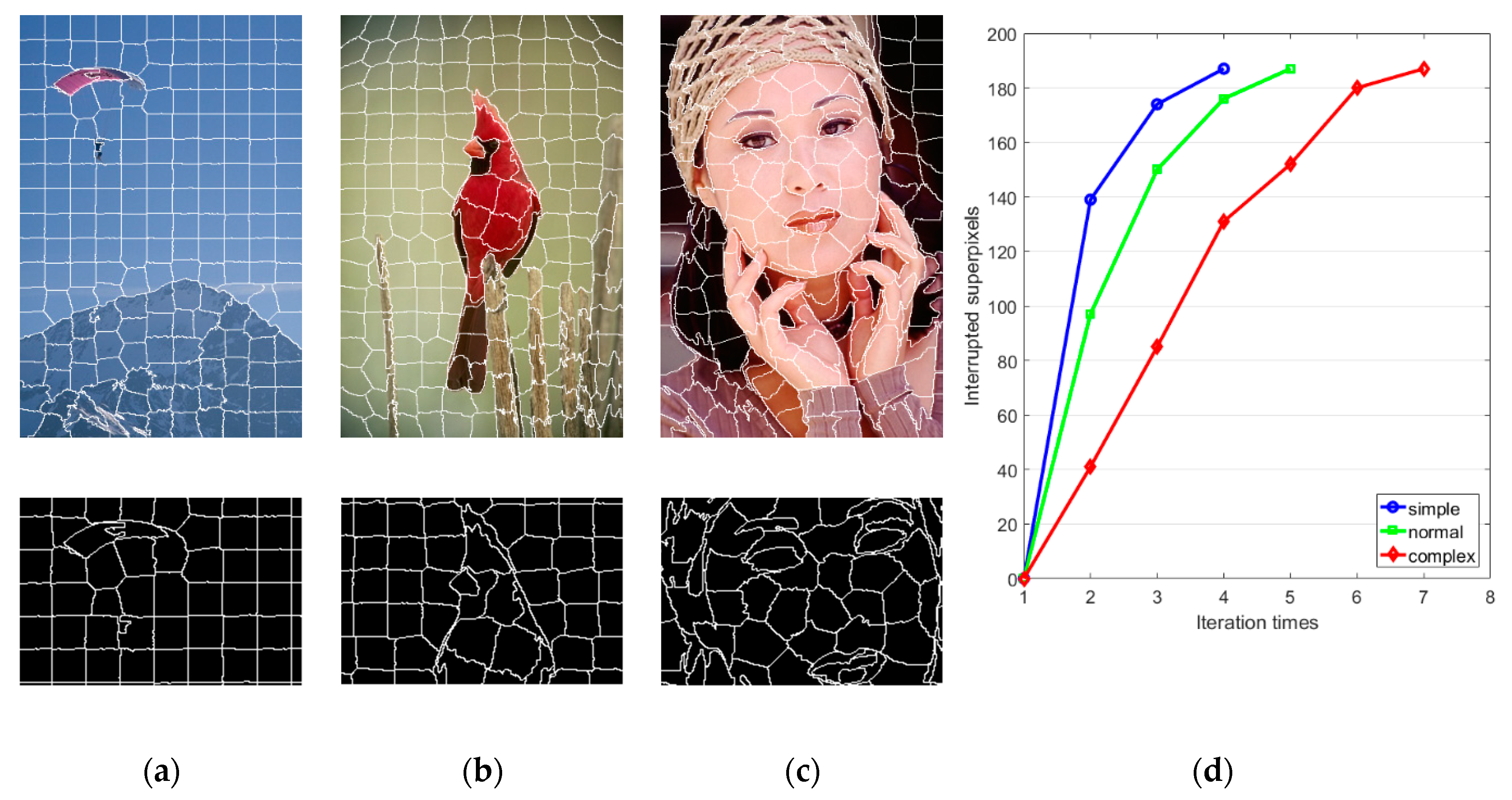
4.1. Visual Comparison and Quantitative Metrics
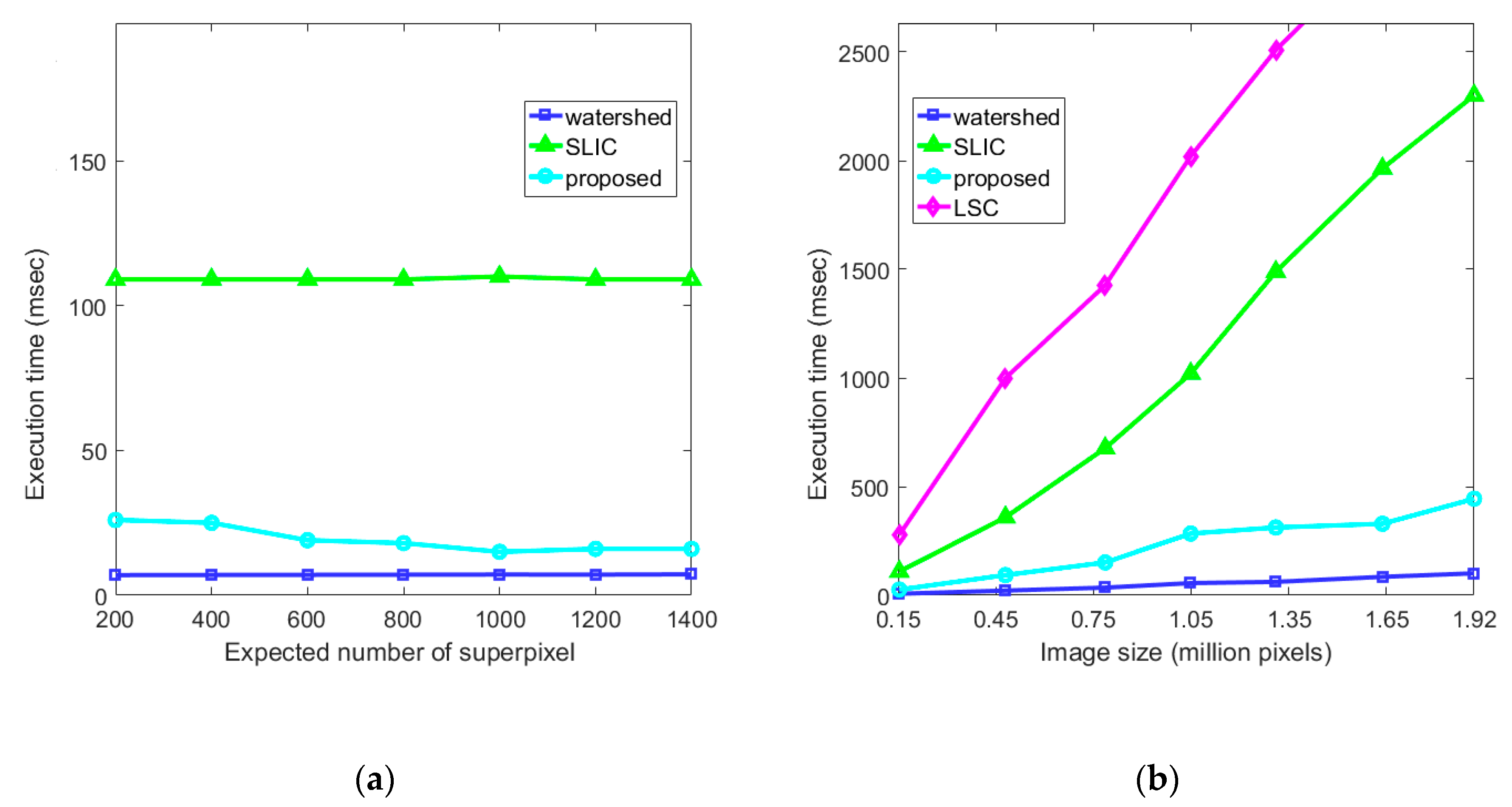
4.2. Algorithm Complexity and Computational Efficiency
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ren, X.; Malik, J. Learning a classification model for segmentation. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Nice, France, 13–16 October 2003; pp. 10–17. [Google Scholar]
- Boemer, F.; Ratner, E.; Lendasse, A. Parameter-free image segmentation with SLIC. Neurocomputing 2018, 277, 228–236. [Google Scholar] [CrossRef]
- Wang, J.; Liu, W.; Xing, W.; Zhang, S. Two-level superpixel and feedback based visual object tracking. Neurocomputing 2017, 267, 581–596. [Google Scholar] [CrossRef]
- Kim, H.; Lee, S.; Lee, D.; Choi, S.; Ju, J.; Myung, H. Real-time human pose estimation and gesture recognition from depth images using superpixels and SVM classifier. Sensors 2015, 15, 12410–12427. [Google Scholar] [CrossRef] [PubMed]
- Fang, L.; Zhuo, H.; Li, S. Super-resolution of hyperspectral image via superpixel-based sparse representation. Neurocomputing 2018, 273, 171–177. [Google Scholar] [CrossRef]
- Chen, J.; Hou, J.; Ni, Y.; Chau, L.-P. Accurate light field depth estimation with superpixel regularization over partially occluded regions. IEEE Trans. Image Process. (TIP) 2018, 27, 4889–4900. [Google Scholar] [CrossRef] [PubMed]
- Shi, J.; Malik, J. Normalized cuts and image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. (TPAMI) 2000, 22, 888–905. [Google Scholar]
- Felzenszwalb, P.F.; Huttenlocher, D.P. Efficient graph-based image segmentation. Int. J. Comput. Vis. (IJCV) 2004, 59, 167–181. [Google Scholar] [CrossRef]
- Veksler, O.; Boykov, Y.; Mehrani, P. Superpixels and supervoxels in an energy optimization framework. In Proceedings of the European Conference on Computer Vision (ECCV), Heraklion, Greece, 5–11 September 2010; pp. 211–224. [Google Scholar]
- Kwatra, V.; Schödl, A.; Essa, I.; Turk, G.; Bobick, A. Graphcut textures: Image and video synthesis using graph cuts. ACM Trans. Graph. (TOG) 2003, 22, 277–286. [Google Scholar] [CrossRef]
- Liu, M.; Tuzel, O.; Ramalingam, S.; Chellappa, R. Entropy rate superpixel segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Colorado Springs, CO, USA, 20–25 June 2011; pp. 2097–2104. [Google Scholar]
- Shen, J.; Du, Y.; Wang, W.; Li, X. Lazy random walks for superpixel segmentation. IEEE Trans. Image Process. (TIP) 2014, 23, 1451–1462. [Google Scholar] [CrossRef]
- Levinshtein, A.; Stere, A.; Kutulakos, K.N.; Fleet, D.J.; Dickinson, S.J.; Siddiqi, K. Turbopixels: Fast superpixels using geometric flows. IEEE Trans. Pattern Anal. Mach. Intell. (TPAMI) 2009, 31, 2290–2297. [Google Scholar] [CrossRef]
- Vincent, L.; Soille, P. Watersheds in digital spaces: An efficient algorithm based on immersion simulations. IEEE Trans. Pattern Anal. Mach. Intell. (TPAMI) 1991, 13, 583–598. [Google Scholar] [CrossRef]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Susstrunk, S. SLIC superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. (TPAMI) 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Li, Z.; Huang, B. Linear spectral clustering superpixel. IEEE Trans. Image Process. (TIP) 2017, 26, 3317–3330. [Google Scholar] [CrossRef] [PubMed]
- Lv, N.; Chen, C.; Qiu, T.; Sangaiah, A.K. Deep learning and superpixel feature extraction based on contractive autoencoder for change detection in SAR images. IEEE Trans. Ind. Inform. (TII) 2018, 14, 5530–5538. [Google Scholar] [CrossRef]
- Zhou, L.; Fu, K.; Liu, Z.; Zhang, F.; Yin, Z.; Zheng, J. Superpixel based continuous conditional random field neural network for semantic segmentation. Neurocomputing 2019, 340, 196–210. [Google Scholar] [CrossRef]
- Jia, S.; Geng, S.; Gu, Y.; Yang, J.; Shi, P.; Qiao, Y. NSLIC: SLIC superpixels based on nonstationarity measure. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 4738–4742. [Google Scholar]
- Wang, P.; Zeng, G.; Gan, R.; Wang, J.; Zha, H. Structure-sensitive superpixels via geodesic distance. Int. J. Comput. Vis. (IJCV) 2013, 103, 1–21. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, C.; Yu, M.; He, Y. Manifold SLIC: A fast method to compute content-sensitive superpixels. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 651–659. [Google Scholar]
- Ren, C.Y.; Prisacariu, V.A.; Reid, I.D. gSLICr: SLIC superpixels at over 250 Hz. arXiv 2015, arXiv:1509.04232. [Google Scholar]
- Ban, Z.; Liu, J.; Fouriaux, J. GLSC: LSC superpixels at over 130 FPS. J. Real-Time Image Process. 2018, 14, 605–616. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, M.; Li, B.; He, Y. Intrinsic manifold SLIC: A simple and efficient method for computing content-sensitive superpixels. IEEE Trans. Pattern Anal. Mach. Intell. (TPAMI) 2018, 40, 653–666. [Google Scholar] [CrossRef]
- Wu, Y.; Peng, X.; Ruan, K.; Hu, Z. Improved image segmentation method based on morphological reconstruction. Multimed. Tools Appl. 2017, 76, 19781–19793. [Google Scholar] [CrossRef]
- Hu, Z.; Zou, Q.; Li, Q. Watershed superpixel. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 349–353. [Google Scholar]
- Meyer, F. Color image segmentation. In Proceedings of the International Conference on Image Processing (ICIP), Singapore, 7–11 September 1992; pp. 303–306. [Google Scholar]
- Wu, G.; Kang, W. Exploiting superpixel and hybrid hash for kernel-based visual tracking. Pattern Recognit. 2017, 68, 175–190. [Google Scholar] [CrossRef]
- Arbelaez, P.; Maire, M.; Fowlkes, C.; Malik, J. Contour detection and hierarchical image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. (TPAMI) 2011, 33, 898–916. [Google Scholar] [CrossRef] [PubMed]
- Niemeyer, M.; Arandjelović, O. Automatic semantic labelling of images by their content using non-parametric Bayesian machine learning and image search using synthetically generated image collages. In Proceedings of the IEEE International Conference on Data Science and Advanced Analytics (DSAA), Turin, Italy, 1–4 October 2018; pp. 160–168. [Google Scholar]








© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, W.; Li, C.; Guo, Y.; Wei, Z.; Guo, B. A Two-Stage Gradient Ascent-Based Superpixel Framework for Adaptive Segmentation. Appl. Sci. 2019, 9, 2421. https://doi.org/10.3390/app9122421
He W, Li C, Guo Y, Wei Z, Guo B. A Two-Stage Gradient Ascent-Based Superpixel Framework for Adaptive Segmentation. Applied Sciences. 2019; 9(12):2421. https://doi.org/10.3390/app9122421
Chicago/Turabian StyleHe, Wangpeng, Cheng Li, Yanzong Guo, Zhifei Wei, and Baolong Guo. 2019. "A Two-Stage Gradient Ascent-Based Superpixel Framework for Adaptive Segmentation" Applied Sciences 9, no. 12: 2421. https://doi.org/10.3390/app9122421
APA StyleHe, W., Li, C., Guo, Y., Wei, Z., & Guo, B. (2019). A Two-Stage Gradient Ascent-Based Superpixel Framework for Adaptive Segmentation. Applied Sciences, 9(12), 2421. https://doi.org/10.3390/app9122421