1. Introduction
Dielectric electro-active polymer (DEAP) materials are a promising actuation technology due to the merits of lightweight, large strain, high energy density, low-noise, and fast response [
1,
2]. DEAP materials, as a kind of soft electroactive material, are composed of a polymer film sandwiched between two silver metal soft electrodes layers [
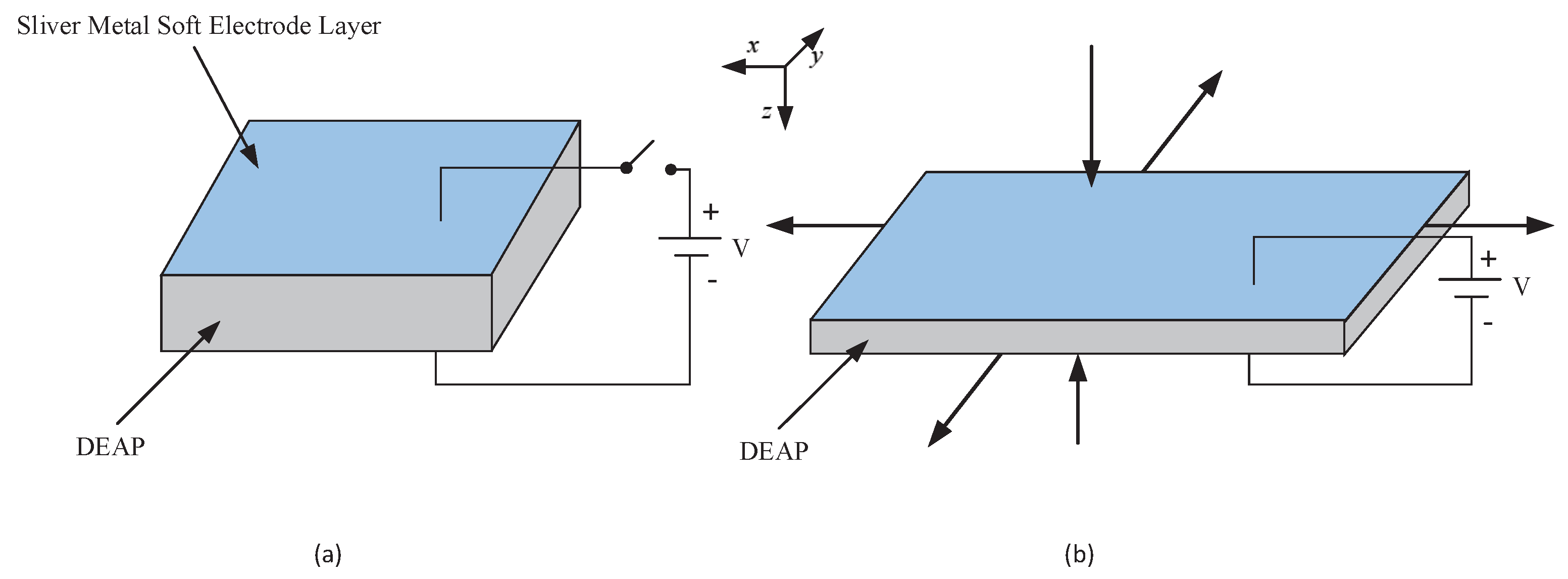
3]. The working principle of DEAP materials is shown in
Figure 1. It can be simply divided into three steps [
3]: (1) a large driving voltage is applied to the silver metal soft electrodes layers to produce a high electric field; (2) the silver metal soft electrodes layers can be regarded as a flat capacitor, a Maxwell stress will be produced by electrostatic forces; (3) the polymer film is extruded under the Maxwell stress to result in actuation. Based on this basic working principle, DEAP materials have been widely applied in high-precision trajectory tracking control as actuators and achieved great potential for applications in bioinspired soft robots filed, including an arm wrestling robot [
4], a flying robot [
5], and a swimming robot [
6]. However, like other smart materials such as shape memory alloys (SMA), piezoelectrics and magnetostrictives, the inherent asymmetric rate-dependent hysteresis nonlinearity is ubiquitous in DEAP actuators [
7], which causes tracking inaccuracy, leads to a decrease in the performance of the closed-loop system, or may even result in oscillations. Therefore, the asymmetric rate-dependent hysteresis modeling and tracking control of such DEAP actuators have been important issues.
The asymmetric rate-dependent hysteresis models of the smart materials can be roughly classified into three categories. The first category is physics-based hysteresis models. For instance, Ref. [
8] presented a dynamic Jiles–Atherton model to describe the asymmetric rate-dependent hysteresis of giant magnetostrictive actuators (GMAs). The second category is phenomenological hysteresis models. For example, Ref. [
9] proposed an MPI model to characterize the asymmetric rate-dependent hysteresis of dielectric elastomer actuators (DEAs), where dynamical envelope functions were used to describe the rate-dependent hysteresis, and polynomial operators were introduced to characterize the asymmetric . Ref. [
10] proposed an MPI model to describe the asymmetric rate-dependent hysteresis of magnetostrictive actuators, in which a rate-dependent PI model was utilized to describe the rate-dependent hysteresis, and dead-zone operators were introduced to characterize the asymmetric. The third category is the intelligent methods-based hysteresis models. Ref. [
11] developed a nonlinear ARX recurrent neural network hysteresis model to characterize the asymmetric rate-dependent hysteresis of SMA actuators. Refs. [
7,
12] developed a Preisach-type dynamic nonlinear ARX fuzzy hysteresis model to describe the asymmetric rate-dependent hysteresis of DEAP actuators. It should be pointed out that the unmodeled hysteresis nonlinearity, residual dynamics, parameter uncertainties and external disturbances will reduce the trajectory tracking accuracy. Therefore, it is necessary to design a robust controller to deal with the nonlinear disturbances.
Various control strategies have been developed for trajectory tracking control of DEAP actuators such as PID control [
7,
13], internal model control [
14] and adaptive sliding mode control (SMC) [
15]. Among those control strategies, SMC scheme has been widely used to control the hysteresis nonlinearity systems, because SMC scheme can guarantee the global robustness of the systems, and can simply and effectively cope with parameters variation and external disturbances [
16]. However, the conventional SMC scheme can only make the system states converge to the equilibrium point asymptotically with infinite settling time. To overcome the shortcoming, terminal sliding mode controller (TSMC) scheme was proposed [
17], in which a nonlinear switching surface was employed to achieve finite time convergence [
18]. In the literature, Ref. [
19] developed a TSMC scheme for precision tracking control and finite time convergence of a piezoelectric-driven micropositioning system. Ref. [
20] proposed an adaptive-gain fast nonsingular TSMC scheme for a piezo positing stage system which can quickly converge in finite time and reduce chattering. The aforementioned SMC and TSMC schemes are all applied in continuous-time domain; however, with the wide use of computers in control systems, the DSMC theory [
21] has attracted considerable attention in recent years [
22,
23,
24]. It must be pointed out that the continuous-time SMC cannot directly convert into its discrete counterpart through simple equivalence. DSMC and DTSMC schemes have been successfully applied to other smart actuators. For instance, Ref. [
25] proposed a novel DSMC scheme for precision tracking control of a piezoelectric actuator. In addition, for making the system state converge to the equilibrium point asymptotically within finite steps, Refs. [
26,
27] proposed DTSMC schemes for precision tracking control of piezoelectric actuators, and the stability of the control systems and the effectiveness of the proposed control schemes were demonstrated through experimental studies. However, to the knowledge of the author, DTSMC scheme has not been applied for precision trajectory tracking of DEAP actuators in the literature.
This paper focuses on the asymmetric rate-dependent hysteresis modeling and trajectory tracking control of a DEAP actuator under different input frequencies. A Hammerstein model with hysteresis nonlinearity is established to describe the asymmetric rate-dependent hysteresis of the DEAP actuator. To estimate the parameters of the model, LM algorithm [
28,
29] is utilized. Based on the MPI model, an inverse hysteresis compensator is obtained to suppress the asymmetric hysteresis. In order to achieve precision tracking control and robustness of the closed-loop system, a DTSMC with a new discrete-time terminal sliding function is proposed. The main contributions of this paper are summarized as follows:
(1) A Hammerstein model with hysteresis nonlinearity is established to account the asymmetric rate-dependent hysteresis of the DEAP actuator and the lumped nonlinear disturbance term is well formulated. It provides with a detailed model for the closed-loop system.
(2) A DTSMC scheme based on a new discrete-time terminal sliding function is first proposed for the DEAP actuator. The proposed control scheme not only improves the trajectory tracking control accuracy and error convergence but also suppresses the chattering phenomenon. In addition, the proposed control scheme does not require a state observer.
(3) Compared with other DTSMC schemes, a terminal-sliding-mode-type switching control law is defined in the proposed DTSMC scheme, which improves the robustness feature of the closed-loop system in the presence of unmodeled hysteresis nonlinearity, residual dynamics, parameter uncertainties and external disturbances.
(4) Finite steps convergence and stability of the closed-loop system are theoretically verified and an experimental investigation is conducted to validate the effectiveness of the proposed control scheme to the DEAP actuator. Then, a comparison between the proposed control scheme and the DSMC scheme is undertaken.
The remainder of the paper is organized as follows. In
Section 2, the analytical formulation of the Hammerstein model and the inverse MPI model are established first, and then the parameters of the Hammerstein model are identified by LM algorithm. In
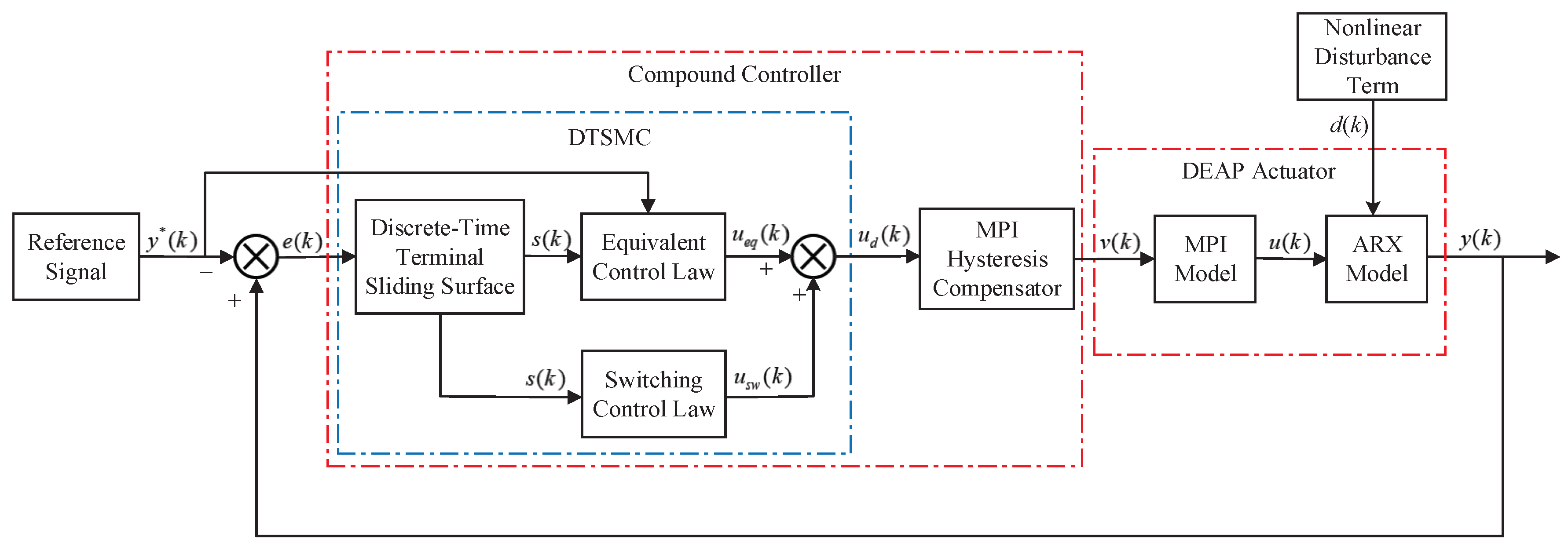
Section 3, a compound controller is proposed, and the system stability is proved. Experimental results of the proposed controller to the DEAP actuator are presented in
Section 4. Conclusions are given in
Section 5.
2. Hammerstein Model for DEAP Actuator
In this section, in order to characterize asymmetric hysteresis loops of the DEAP actuator, a Hammerstein model is established, as shown in
Figure 2. It consists of two parts: nonlinear static part and linear dynamic part. The nonlinear static part is represented by an MPI model to describe the asymmetric hysteresis, and the linear dynamic part is represented by an ARX model to describe the rate-dependent hysteresis. In the
Figure 2,
and
represent the input and output of the DEAP actuator, respectively,
is the corresponding unmeasurable internal variable, and
is the external disturbance.
2.1. MPI Model
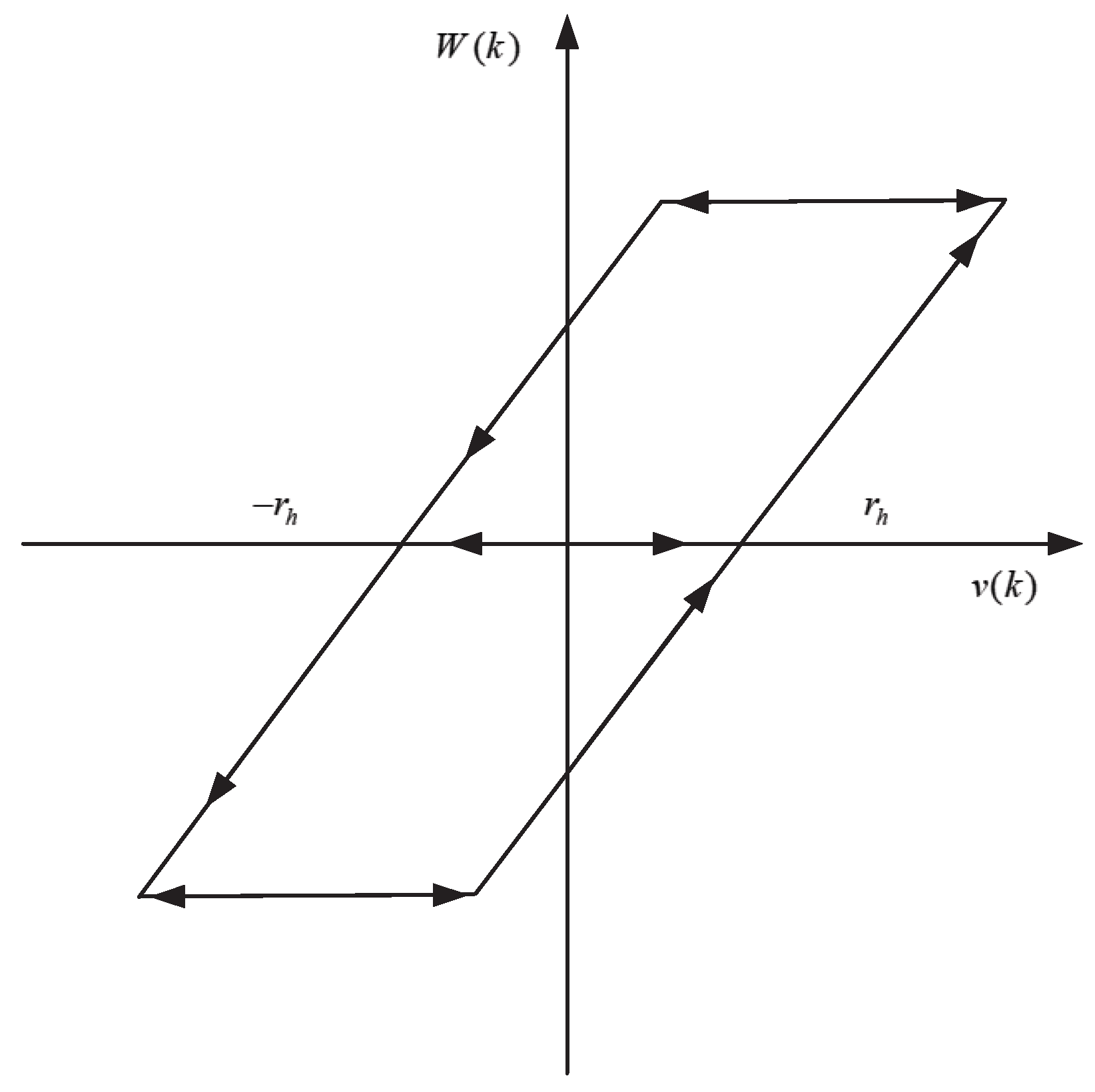
In this subsection, an MPI model is established to characterize the asymmetric hysteresis of the DEAP actuator. The MPI model is formulated as the cascade of the PI model and the dead-zone (DZ) model [
30], in which the PI model is a weighted superposition of play operators, and the DZ model is a weighted superposition of dead-zone operators. The play operator and the dead-zone operator are shown in
Figure 3 and
Figure 4, respectively.
The play operator is expressed as [
31]
while the initial condition is defined as follows:
The output of the PI model can be formulated as
where
q is a given positive constant;
v and
W represent the input and output of the PI model, respectively;
is the vector of weights;
is the vector of thresholds with
;
denotes the vector of play operators;
is the vector of initial states;
n is the number of play operators.
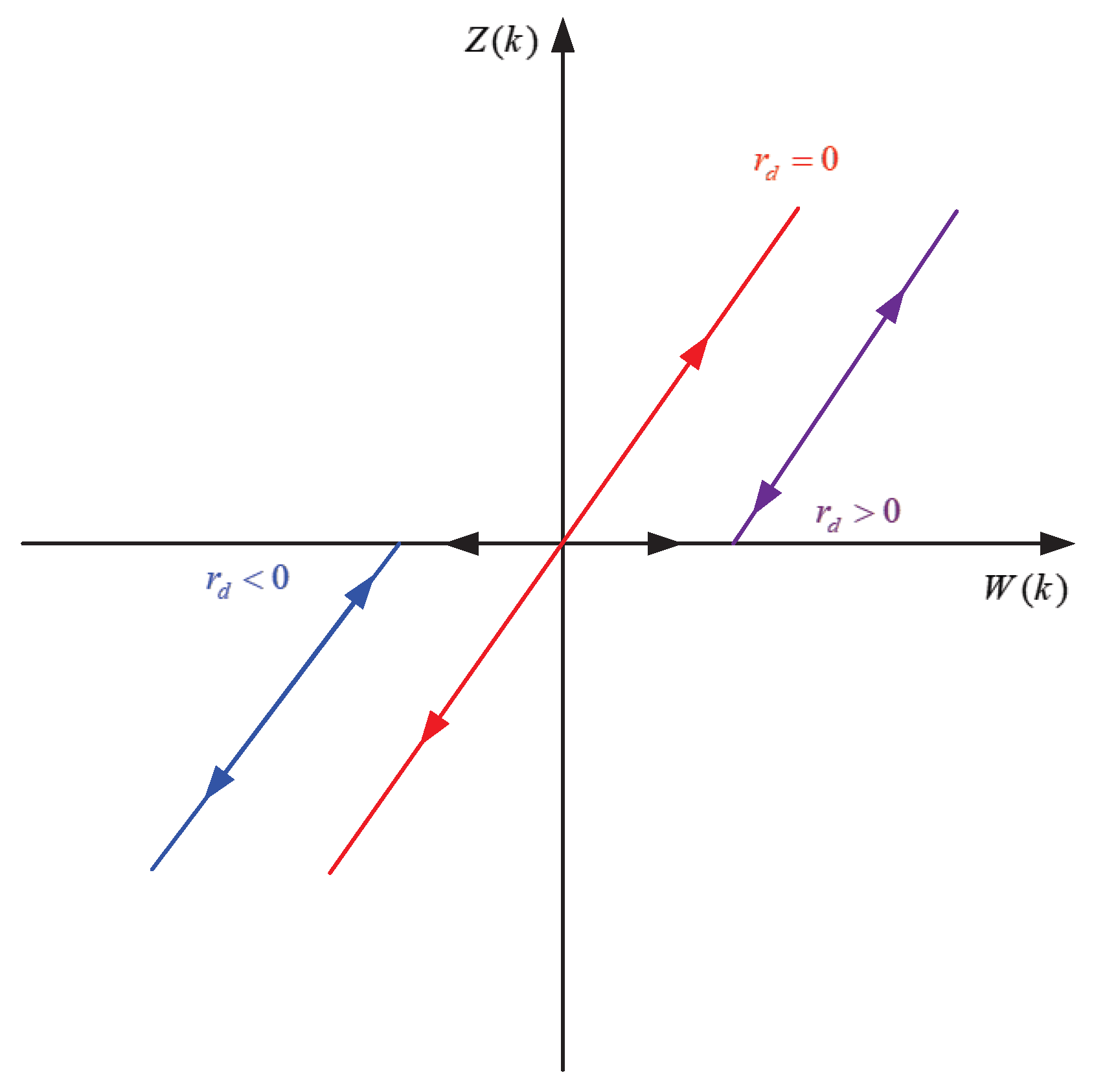
The formulation of the dead-zone operator is expressed as
The output of the DZ model can be formulated as
where
W and
Z denote the input and output of the DZ model, respectively;
is the vector of weights;
is the vector of thresholds with
;
m is the number of dead-zone operators.
Substituting Equations (
3) into (
5), the mathematical formulation of the MPI model can be derived as
The form of the inverse MPI model is the same as the MPI model. From Equation (
6), the inverse MPI model can be expressed as [
31]
where
is a positive constant;
is the vector of inverse play operators;
is the intinal state;
and
denote the weighting vector and the threshold vector of inverse play operators, respectively;
is the vector of inverse dead-zone operators;
and
denote the weighting vector and the threshold vector of inverse dead-zone operators, respectively.
The parameters of the inverse MPI model can be obtained by using Equations (
8) and (
9).
2.2. ARX Model
In this subsection, a linear dynamic ARX model is established to characterize the rate-dependent hysteresis of the DEAP actuator, which can be defined as
where
and
are polynomials in the unit backward shift operator
with the known orders
and
;
is the system output sequence;
is the input of the ARX model and also the output of the MPI model;
is the external disturbance.
Define the parameter vectors , and . Define the information vectors , and .
Equation (
10) can be turned into
2.3. Parameters Identification
The goal of this subsection is to obtain the parameters values of the MPI model and the ARX model. Specific identification steps are as follows:
Step (1): The asymmetric hysteresis characterization of the DEAP actuator is modeled by using the MPI model. A low frequency input signal v of Hz is given to the DEAP actuator, and N pairs of discrete input and output sequences are measured. Then, based on the input data v and the output data y, LM algorithm is employed to identify the MPI model parameters.
Step (2): After the MPI model is determined, a hybrid frequency input signal in range of to Hz is given to the DEAP actuator, and the discrete input and output sequences are measured. Based on the identified MPI model and v, the intermediate unmeasurable variable u can be obtained. Then, based on the intermediate variable u and the output data y, the parameters of the ARX model are identified by LM algorithm.
The accuracy of the identified model can be expressed by root-mean-square error (RMSE) and mean absolute error (MAE), which are defined as follows:
where
is the output of the DEAP actuator,
is the output of the Hammerstein model, and
N is the amount of experimental data. The identified parameters of the PI model, DZ model and ARX model are given in
Table 1,
Table 2 and
Table 3, respectively.
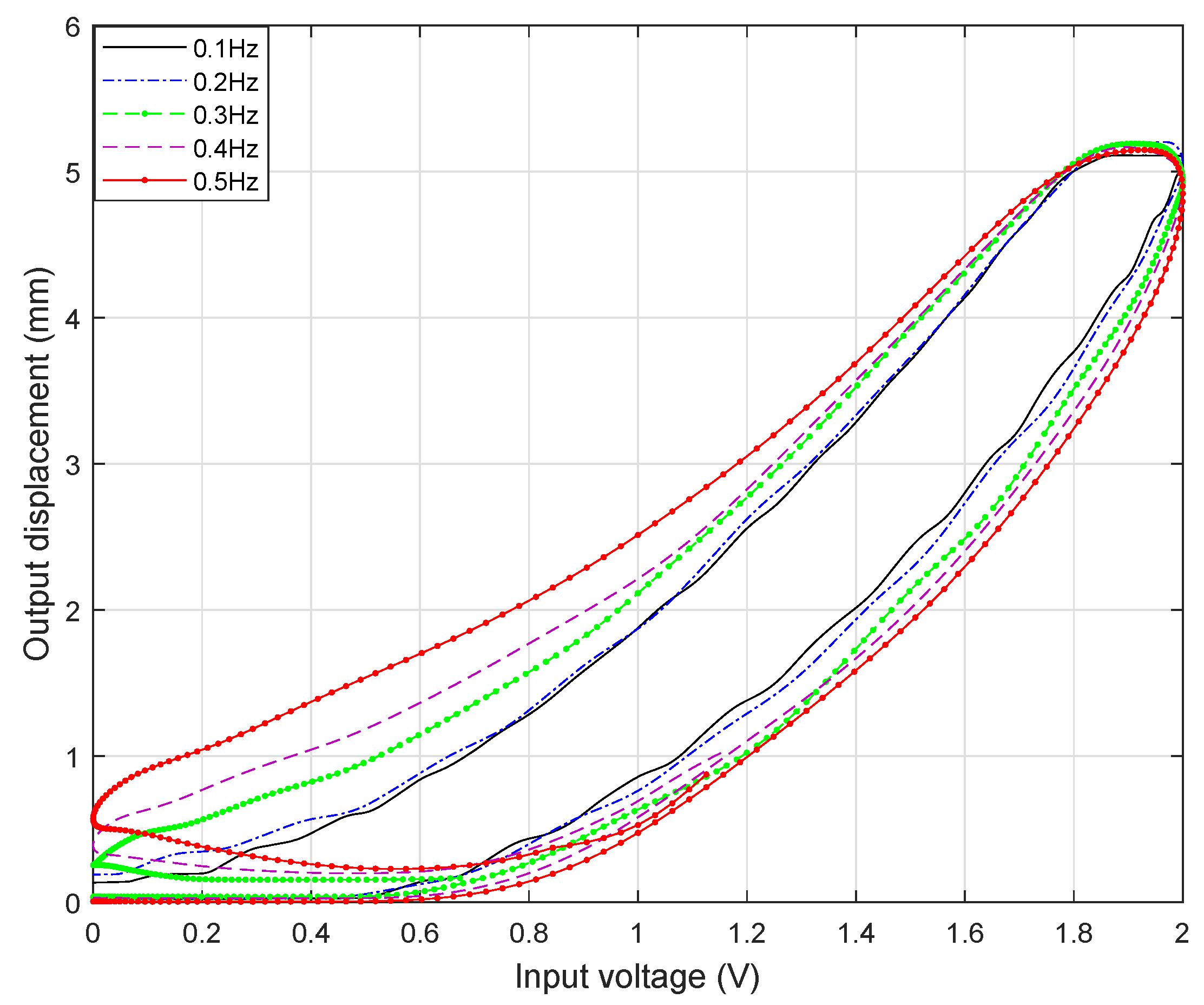
Figure 5 shows the asymmetric rate-dependent hysteresis loops of the DEAP actuator in the range of
to
Hz. It illustrates that the width of the hysteresis loops will gradually increase with increasing frequency of the input signal [
7,
12].
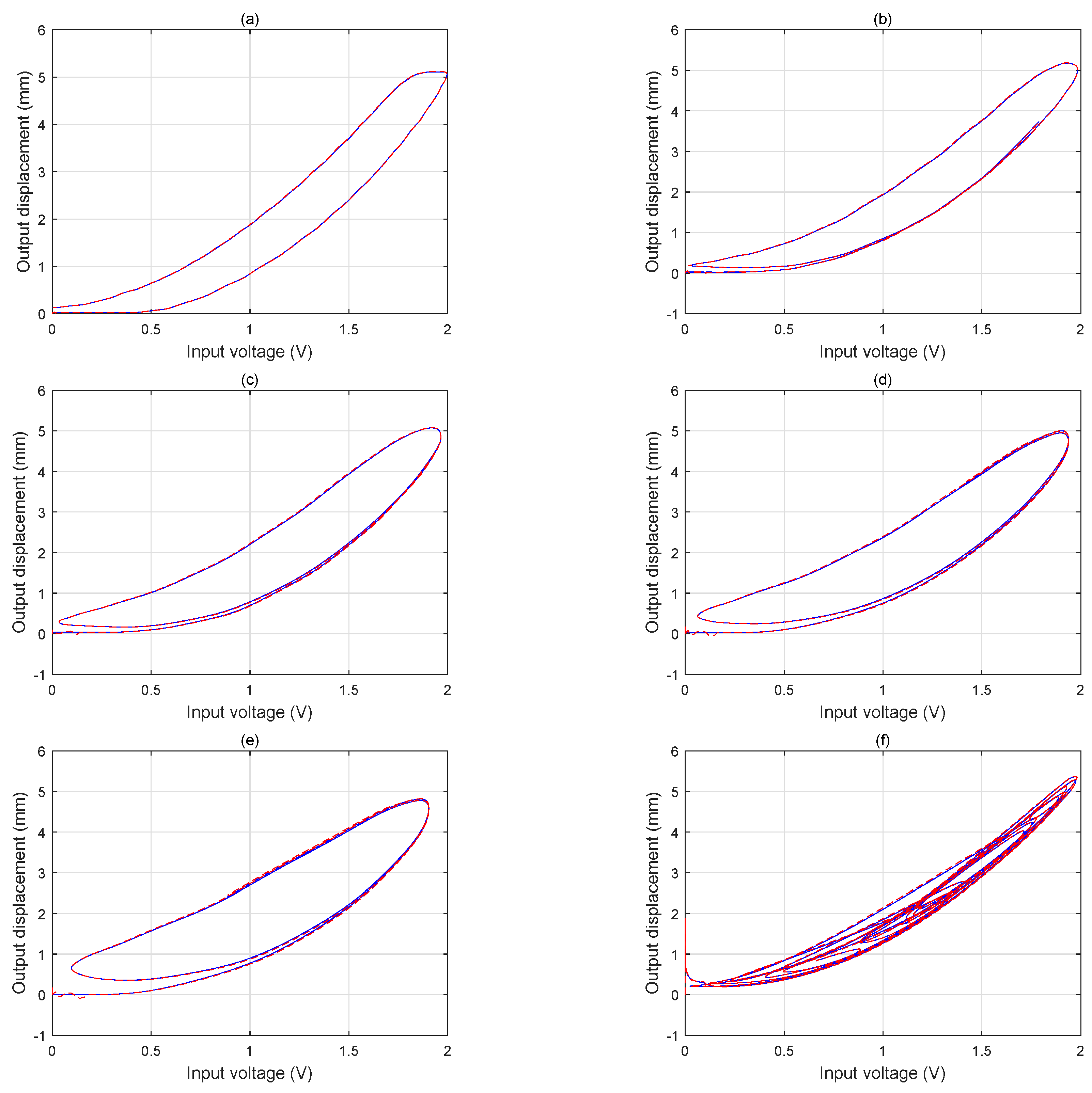
2.4. Model Validation
To validate the Hammerstein model for the DEAP actuator, input signals at a frequency of
Hz,
Hz,
Hz,
Hz,
Hz, and a hybrid frequency in range of
to
Hz are applied to the DEAP actuator, respectively.
Figure 6 shows the input-output relationship between the Hammerstein model and the DEAP actuator under different input frequencies.
Table 4 shows the modeling errors. It can be seen that the maximal RMSE and maximal MAE are
mm and
mm, respectively. Therefore, the identified parameters of the Hammerstein model are correct, and the Hammerstein model is effective in characterizing asymmetric rate-dependent hysteresis of the DEAP actuator.
5. Conclusions
The inherit asymmetric rate-dependent hysteresis characterization in the DEAP actuator is a barrier to achieving high-precision trajectory tracking control. In this paper, we establish a Hammerstein model to characterize the asymmetric rate-dependent hysteresis and employ LM algorithm to identify the parameters of the MPI model and the ARX model. In order to suppress the asymmetric hysteresis behavior, the inverse MPI model is used to be the hysteresis feedforward compensator. Furthermore, to overcome the challenge of the estimation error and other perturbations, based on the hysteresis feedforward compensator, a novel DTSMC is proposed for the high-precision tracking control of the DEAP actuator, and the system stability is analyzed. A conventional DSMC with the hysteresis compensator is implemented for comparison.
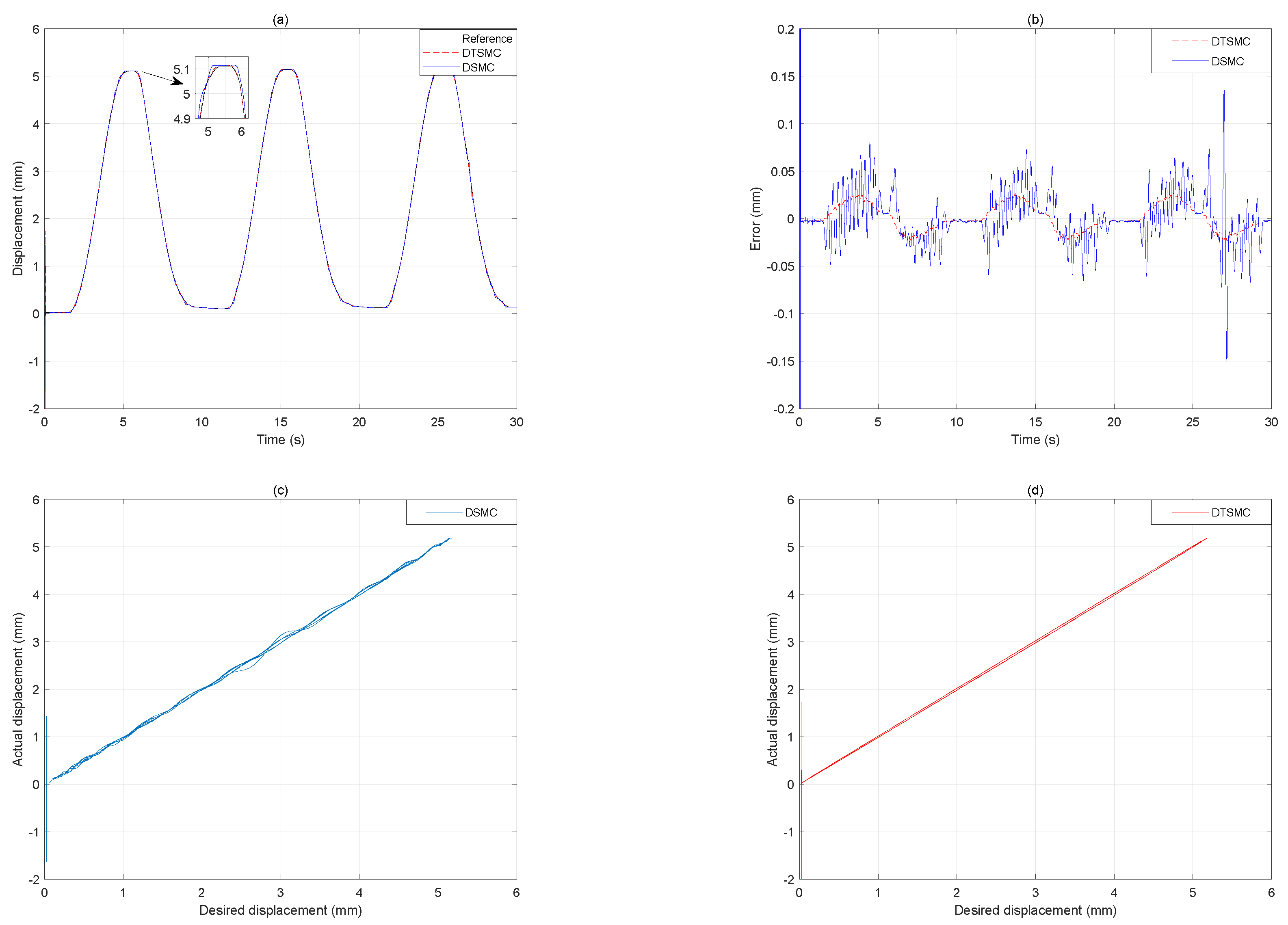
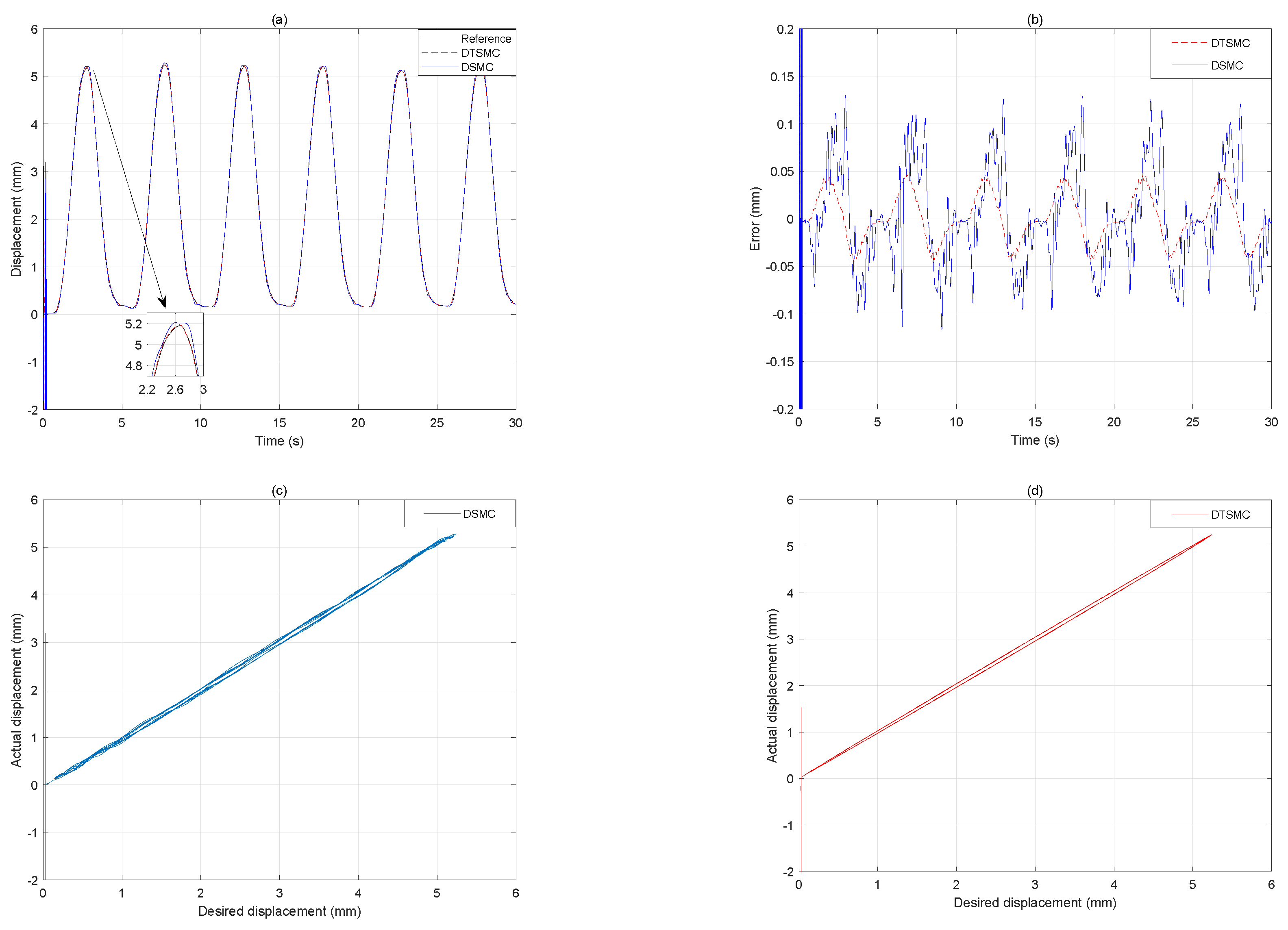
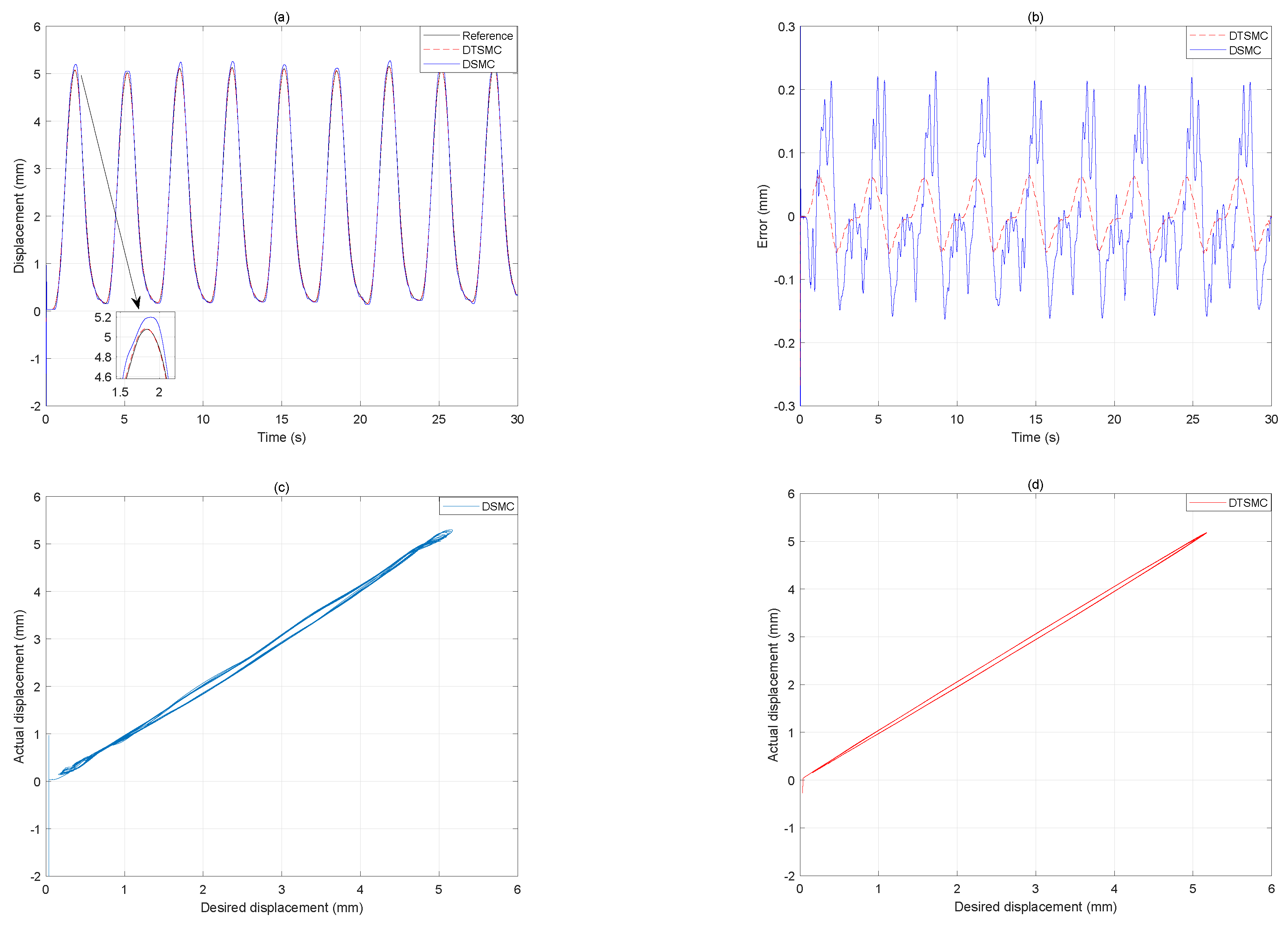
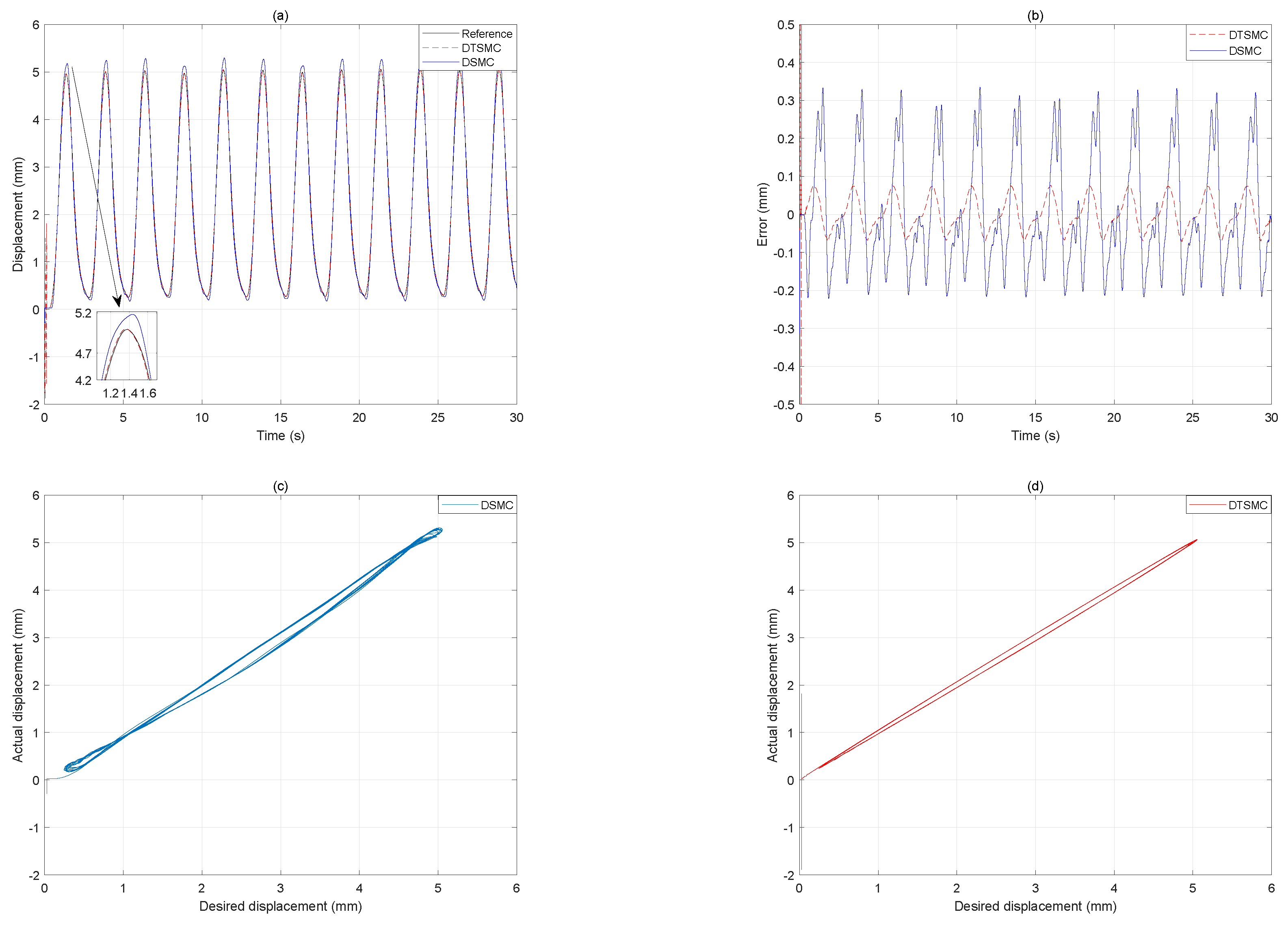
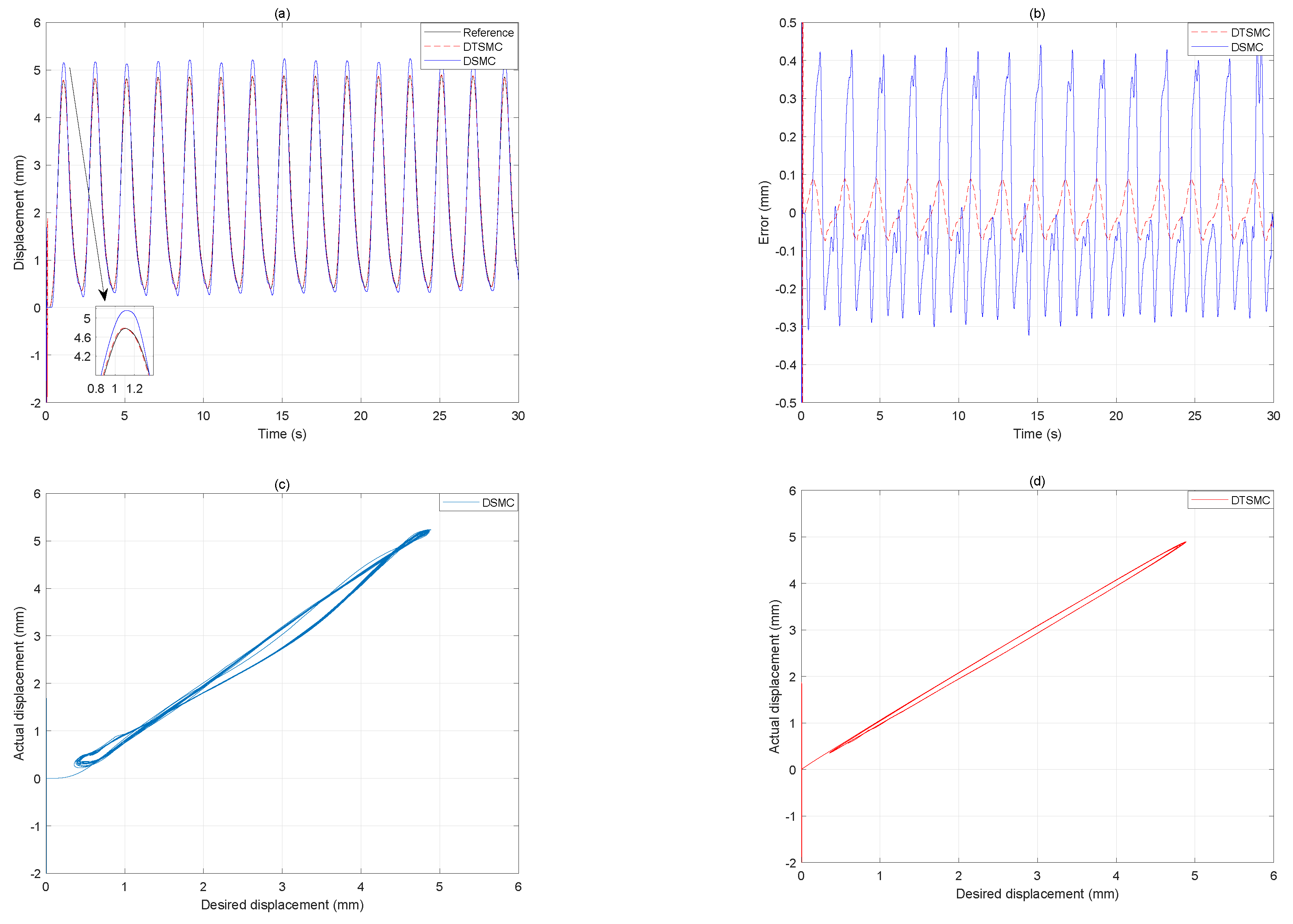
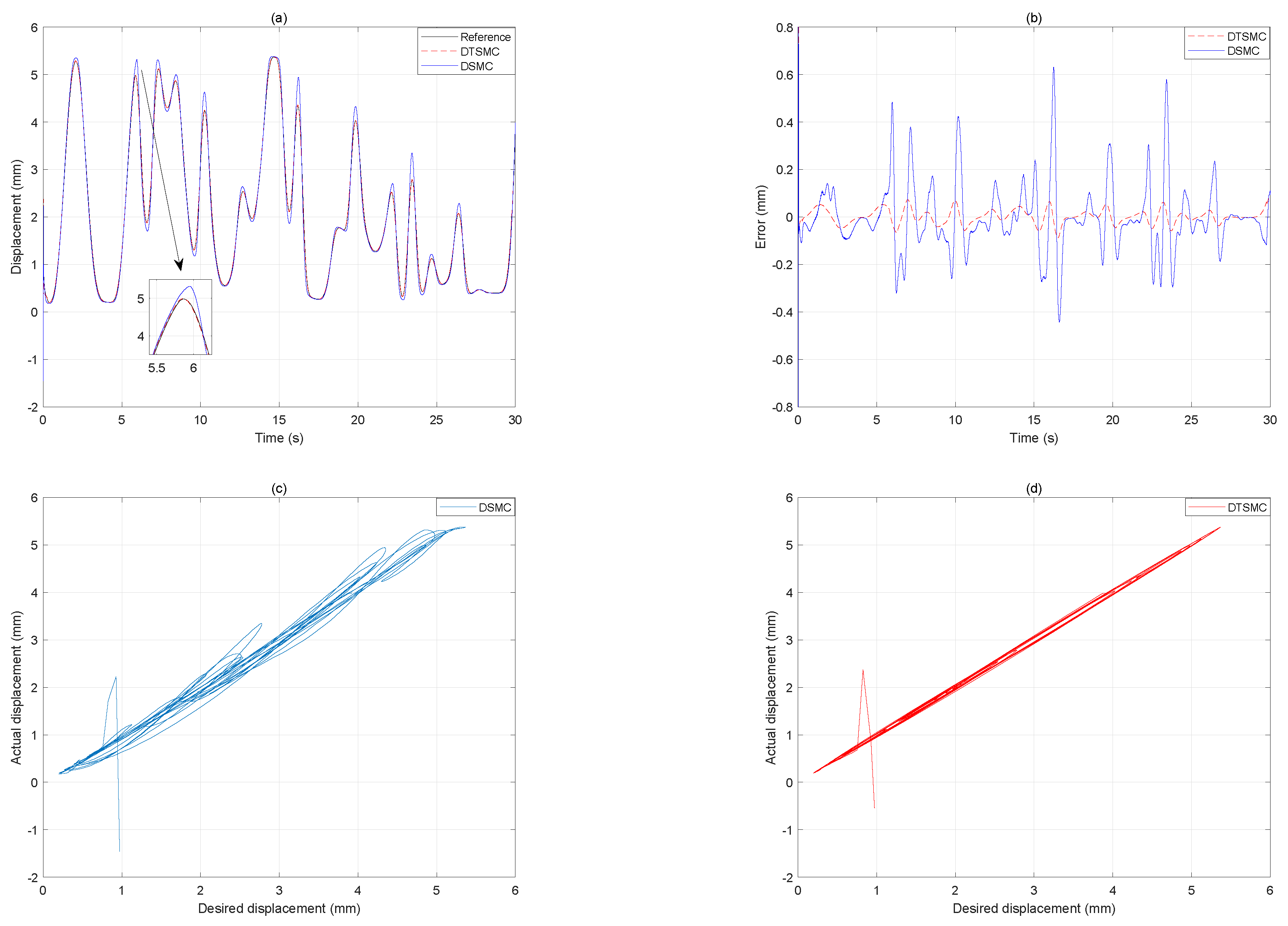
The above two control schemes are tested under different frequencies’ input signals, including Hz, Hz, Hz, Hz, Hz and a hybrid frequency. Noting that, in the DSMC and DTSMC schemes, the switching control may make the chattering occur. To eliminate the chattering, we employ the smoother saturation function to replace the signum function in this work. When the input signal frequency is increased, or the input signal is a hybrid frequency, compared with the DSMC with hysteresis compensator, experimental results show that the proposed DTSMC with the hysteresis compensator can improve the tracking accuracy, robustness, and error convergence of the DEAP actuator. The hysteresis compensation effect of the proposed control scheme is significantly higher than that of the DSMC scheme.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}