Performance Improvement for PMSM Driven by DTC Based on Discrete Duty Ratio Determination Method


Abstract
:1. Introduction
2. Calculating the Accurate Active Factors
3. Analysis of the Analytical Relationships of the Synthetic Vector
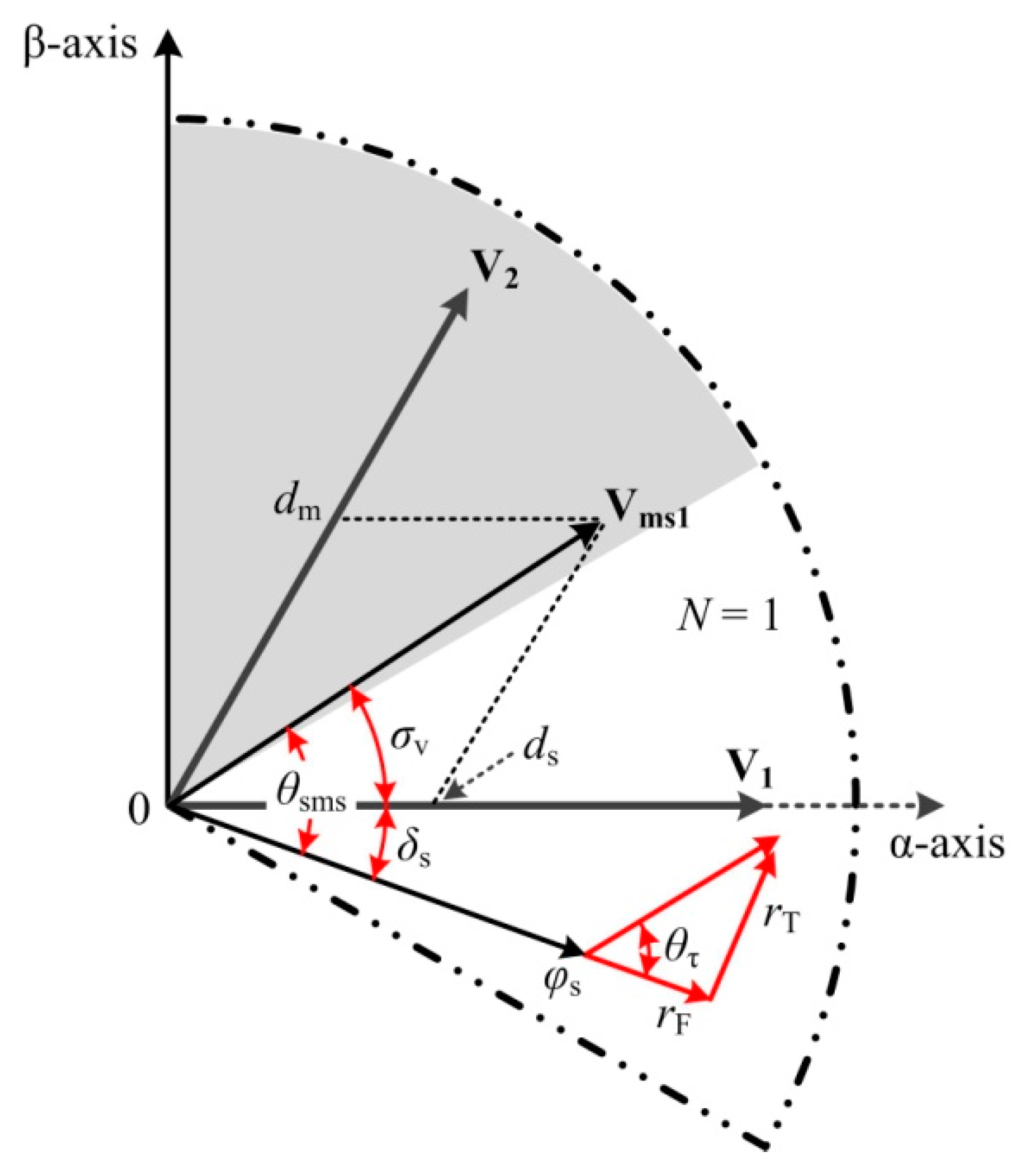
3.1. Analysis of the Synthetic Vector
3.2. Calculation of the Discrete Sector Angle
3.3. Calculation of the Discrete Error Angle
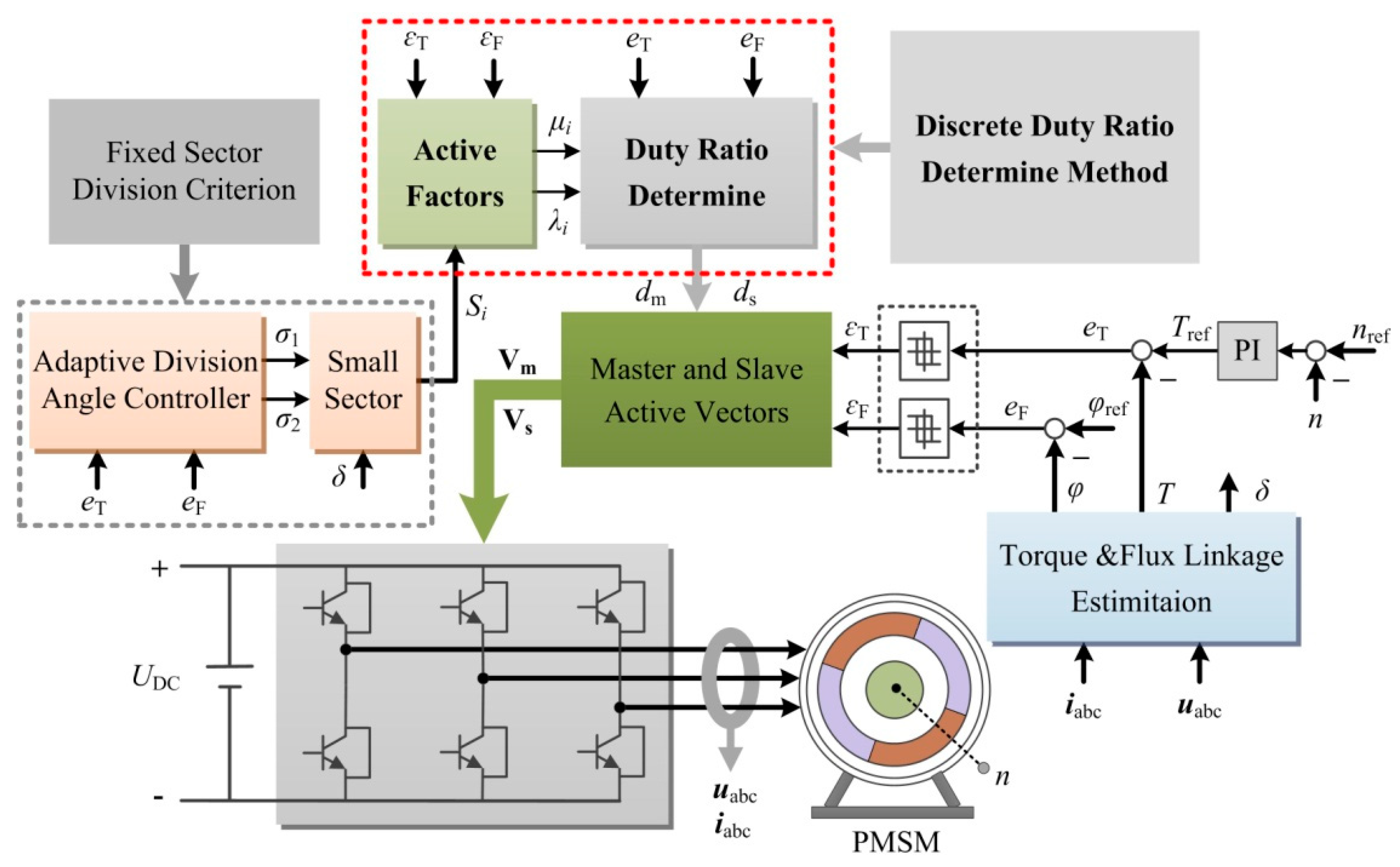
4. Discrete Duty Ratio Determination Method
4.1. Scheme Diagram of the Discrete Duty Ratio Determination Method
- dm: Duty ratio value of the master vector;
- ds: Duty ratio value of the slave vector;
- kms: Scale between the master vector duty ratio and the slave vector duty ratio;
- θsv: Active angle of thephase-lag active vector;
- rT: Torque error rate;
- σv: Sector angle between the synthetic vector and the slave vector;
- θτ: Error angle;
- δs: Impact angle between the sector vector and the stator flux linkage φs;
- NN: Sector number of the phase-lag active vector;
- Ns: Sector number where the stator flux linkage located in;
- Vm: Master vector;
- Vs: Slave vector;
- τD: Discrete value of the error rate state value;
- τ: State value of the error rate.
4.2. Calculation of the Duty Ratio Scale
5. Experimental Analysis
5.1. Experimental System Setup
5.2. Steady-State Performance
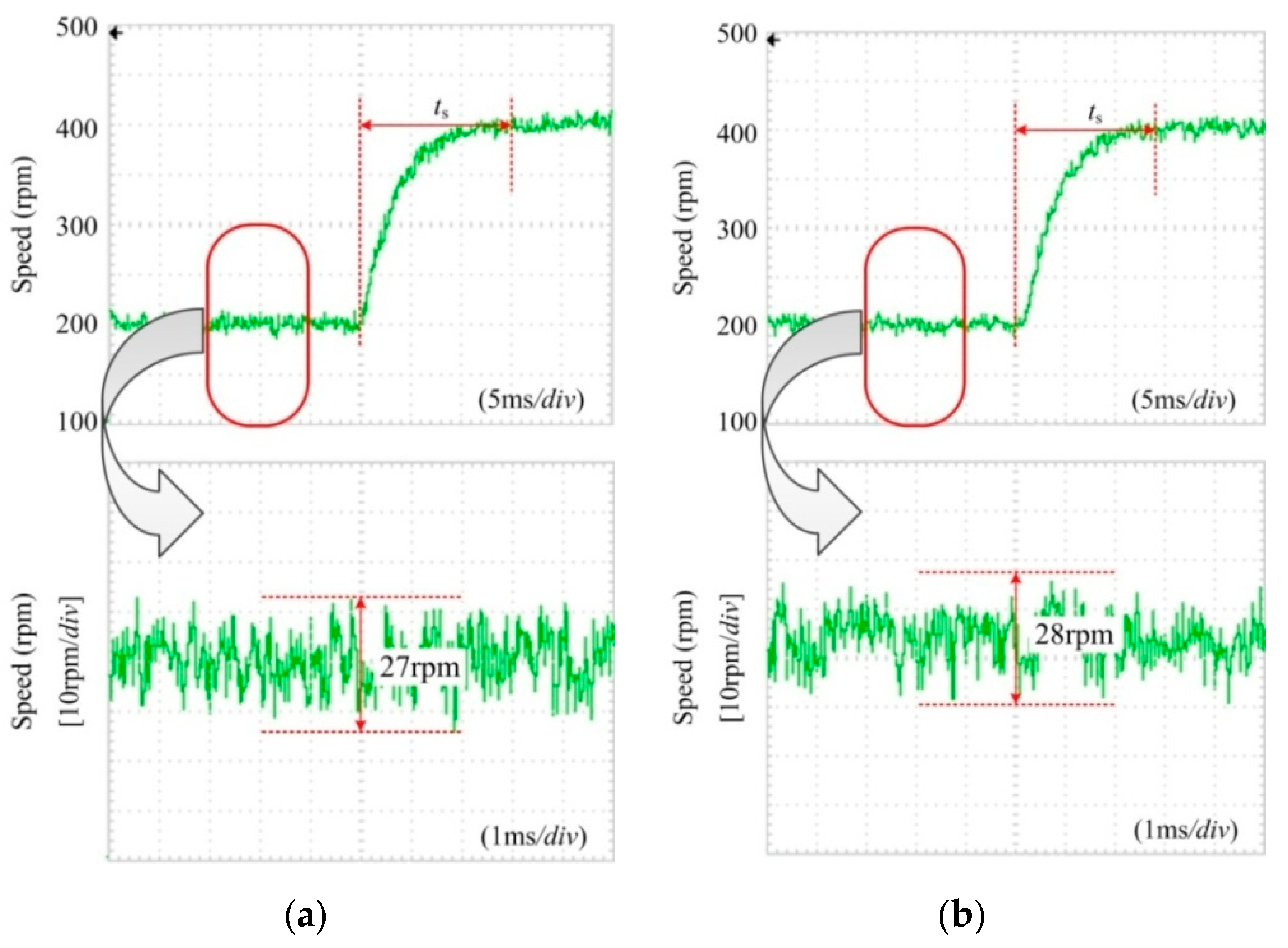
5.3. Dynamic Performance
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yuan, T.Q.; Wang, D.Z.; Li, Y.; Yan, X.; Tan, S.; Zhou, S. Duty ratio modulation strategy to minimize torque and flux linkage ripples in IPMSM DTC system. IEEE Access 2017, 5, 14323–14332. [Google Scholar] [CrossRef]
- Yuan, T.; Wang, D.; Wang, X.; Wang, X.; Sun, Z. High-Precision servo control of industrial robot driven by PMSM-DTC utilizing composite active vectors. IEEE Access. 2019, 7, 7577–7587. [Google Scholar] [CrossRef]
- Wang, D.; Yuan, T.; Wang, X.; Wang, X.; Ni, Y. Performance improvement of servo control system driven by novel PMSM-DTC based on fixed sector division criterion. Energies 2019, 12, 2154. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, G. Predictive DTC Strategy with fault-tolerant function for six-phase andthree-phase PMSM series-connected drive system. IEEE Trans. Ind. Electron. 2018, 65, 9101–9112. [Google Scholar] [CrossRef]
- Shinohara, A.; Inoue, Y.; Morimoto, S.; Sanada, M. Direct calculation method of reference flux linkage for maximum torque per ampere control in DTC-based IPMSM drives. IEEE Trans. Power Electron. 2016, 32, 2114–2122. [Google Scholar] [CrossRef]
- Alsofyani, I.M.; Idris, N.R.; Lee, K.B. Dynamic hysteresis torque band for improving the performance of lookup-table-based DTC of induction machines. IEEE Trans. Power Electron. 2018, 33, 7959–7970. [Google Scholar] [CrossRef]
- Putri, A.K.; Rick, S.; Franck, D.; Hameyer, K. Application of sinusoidal field pole in a permanent-magnet synchronous machine to improve the NVH behavior considering the MTPA and MTPV operation area. IEEE Trans. Ind. Appl. 2016, 52, 2280–2288. [Google Scholar] [CrossRef]
- Xia, C.; Zhao, J.; Yan, Y.; Shi, T. A novel direct torque and flux control method of matrix converter-fed PMSM drives. IEEE Trans. Power Electron. 2014, 29, 5417–5430. [Google Scholar] [CrossRef]
- Mohan, D.; Zhang, X.; Foo, G.H. A simple duty cycle control strategy to reduce torque ripples and improve low-speed performance of a three-level inverter fed DTC IPMSM drive. IEEE Trans. Ind. Electron. 2017, 64, 2709–2721. [Google Scholar] [CrossRef]
- Niu, F.; Wang, B.; Babel, A.S.; Li, K.; Strangas, E.G. Comparative evaluation of direct torque control strategies for permanent magnet synchronous machines. IEEE Trans. Power Electron. 2016, 31, 1408–1424. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhu, J.; Xu, W.; Guo, Y. A simple method to reduce torque ripple in direct torque-controlled permanent-magnet synchronous motor by using vectors with variable amplitude and angle. IEEE Trans. Ind. Electron. 2011, 58, 2848–2859. [Google Scholar] [CrossRef]
- Ren, Y.; Zhu, Z.Q.; Liu, J. Direct torque control of permanent-magnet synchronous machine drives with a simple duty ratio regulator. IEEE Trans. Ind. Electron. 2014, 61, 5249–5258. [Google Scholar] [CrossRef]
- Niu, F.; Li, K.; Wang, Y. Direct torque control for permanent magnet synchronous machines based on duty ratio modulation. IEEE Trans. Ind. Electron. 2015, 62, 6160–6170. [Google Scholar] [CrossRef]
- Lee, J.S.; Lorenz, R.D. Deadbeat direct torque and flux control of IPMSM drives using a minimum time ramp trajectory method at voltage and current limits. IEEE Trans. Ind. Appl. 2014, 50, 3795–3804. [Google Scholar] [CrossRef]
- Mohan, D.; Zhang, X.; Foo, G.H. Generalized DTC strategy for multilevel inverter fed IPMSMs with constant inverter switching frequency and reduced torque ripples. IEEE Trans. Energy Convers. 2017, 32, 1031–1041. [Google Scholar] [CrossRef]
- Zhang, X.; Foo, G.H. Over-modulation of constant switching frequency based DTC for reluctance synchronous motors incorporating field-weakening operation. IEEE Trans. Ind. Electron. 2019, 66, 37–47. [Google Scholar] [CrossRef]
- Berzoy, A.; Rengifo, J.; Mohammed, O. Fuzzy predictive DTC of induction machines with reduced torque ripple and high performance operation. IEEE Trans. Power Electron. 2018, 33, 2580–2587. [Google Scholar] [CrossRef]
- Choi, Y.S.; Choi, H.H.; Jung, J.W. Feedback linearization direct torque control with reduced torque and flux ripples for IPMSM drives. IEEE Trans. Power Electron. 2016, 31, 3728–3737. [Google Scholar] [CrossRef]
- Zhang, Z.; Wei, C.; Qiao, W.; Qu, L. Adaptive saturation controller-based direct torque control for permanent-magnet synchronous machines. IEEE Trans. Power Electron. 2016, 31, 7112–7122. [Google Scholar] [CrossRef]
- Liang, D.; Li, J.; Qu, R.; Kong, W. Adaptive second-order sliding-mode observer for PMSM sensorless control considering VSI nonlinearity. IEEE Trans. Power Electron. 2018, 33, 8994–9004. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Value | |||||
|---|---|---|---|---|---|---|
| dm(im) | 0 | 1 | 2 | 3 | 4 | 5 |
| ds(is) | 12 | 11 | 10 | 9 | 8 | 7 |
| σv(°) | 0 | 4 | 9 | 14 | 19 | 25 |
| dm(im) | 6 | 7 | 8 | 9 | 10 | 11 |
| ds(is) | 6 | 5 | 4 | 3 | 2 | 1 |
| σv(°) | 30 | 35 | 41 | 46 | 51 | 56 |
| Variables | Value | |||||
|---|---|---|---|---|---|---|
| θτ(°) | 0 | 5 | 10 | 15 | 20 | 25 |
| τD | 0 | 0.09 | 0.18 | 0.27 | 0.36 | 0.47 |
| θτ(°) | 30 | 35 | 40 | 45 | 50 | 55 |
| τD | 0.58 | 0.7 | 0.84 | 1 | 1.2 | 1.43 |
| θτ(°) | 60 | 65 | 70 | 75 | 80 | 85 |
| τD | 1.73 | 2.14 | 2.75 | 3.73 | 5.7 | 11.4 |
| Variables | Value | |||||
|---|---|---|---|---|---|---|
| σv(°) | 0 | 5 | 10 | 15 | 20 | 25 |
| kms | 0 | 0.09 | 0.2 | 0.33 | 0.5 | 0.71 |
| σv(°) | 30 | 35 | 40 | 45 | 50 | 55 |
| kms | 1 | 1.4 | 2 | 3 | 5 | 11 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Yuan, T.; Wang, X.; Wang, X.; Wang, S.; Ni, Y. Performance Improvement for PMSM Driven by DTC Based on Discrete Duty Ratio Determination Method. Appl. Sci. 2019, 9, 2924. https://doi.org/10.3390/app9142924
Wang D, Yuan T, Wang X, Wang X, Wang S, Ni Y. Performance Improvement for PMSM Driven by DTC Based on Discrete Duty Ratio Determination Method. Applied Sciences. 2019; 9(14):2924. https://doi.org/10.3390/app9142924
Chicago/Turabian StyleWang, Dazhi, Tianqing Yuan, Xingyu Wang, Xinghua Wang, Sihan Wang, and Yongliang Ni. 2019. "Performance Improvement for PMSM Driven by DTC Based on Discrete Duty Ratio Determination Method" Applied Sciences 9, no. 14: 2924. https://doi.org/10.3390/app9142924
APA StyleWang, D., Yuan, T., Wang, X., Wang, X., Wang, S., & Ni, Y. (2019). Performance Improvement for PMSM Driven by DTC Based on Discrete Duty Ratio Determination Method. Applied Sciences, 9(14), 2924. https://doi.org/10.3390/app9142924