Soft Rehabilitation and Nursing-Care Robots: A Review and Future Outlook



Abstract
:1. Introduction
2. Mechanical Design
2.1. Soft Rehabilitation and Nursing-Care Robots Based on Tendon-Driven Actuation
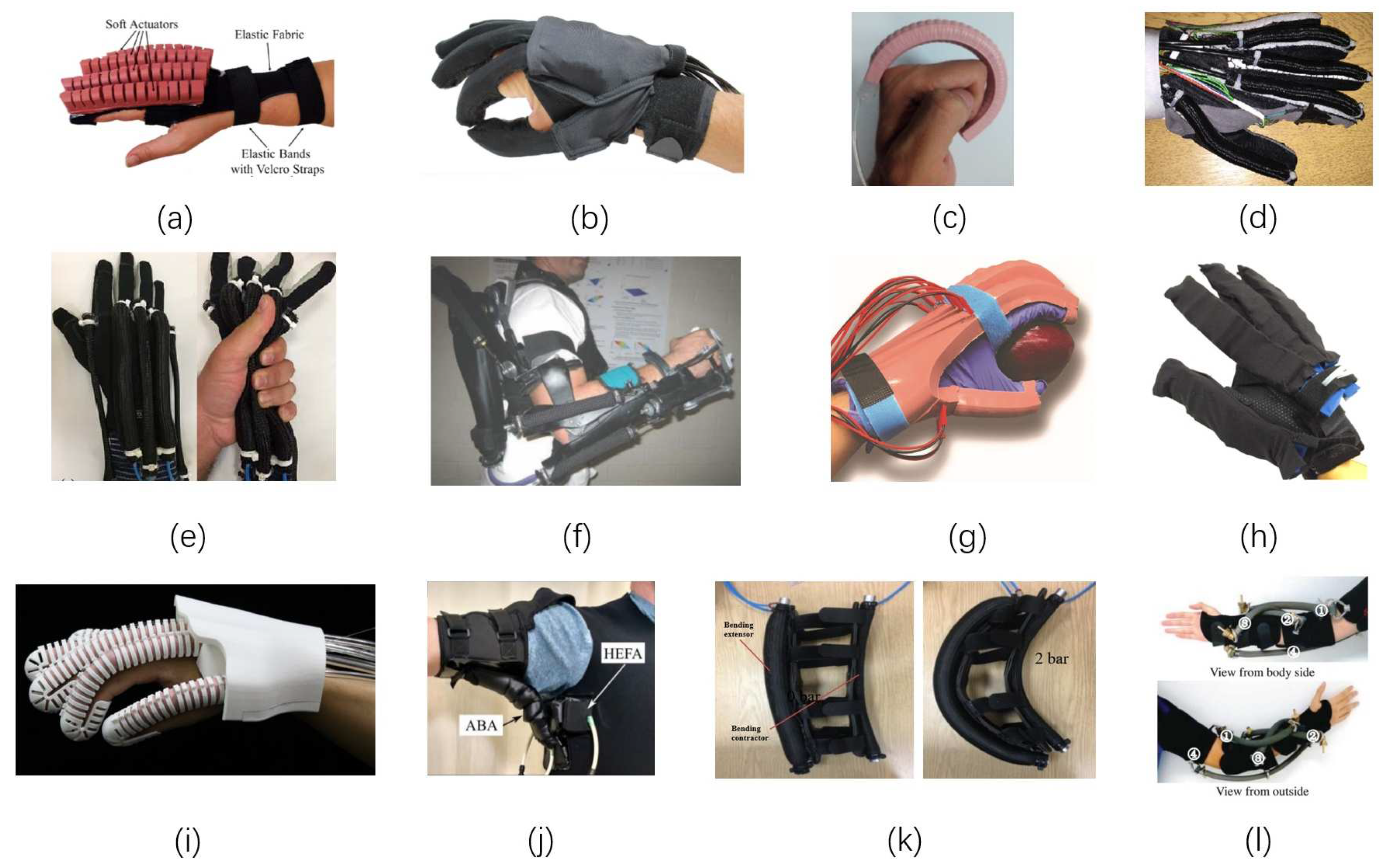
2.2. Soft Rehabilitation and Nursing-Care Robots Based on the Soft Intelligent Materials Actuation
2.2.1. Pneumatic Fiber Braids and Elastomeric Polymers
2.2.2. Other Soft Intelligent Materials
3. Modeling Methods and Control Strategies
3.1. Soft Rehabilitation and Nursing-Care Robots Based on Tendon-Driven Actuation
3.2. Soft Rehabilitation and Nursing-Care Robots Based on the Soft Intelligent Materials Actuation
3.2.1. Pneumatic Fiber Braids and Elastomeric Polymers
3.2.2. Other Soft Intelligent Materials
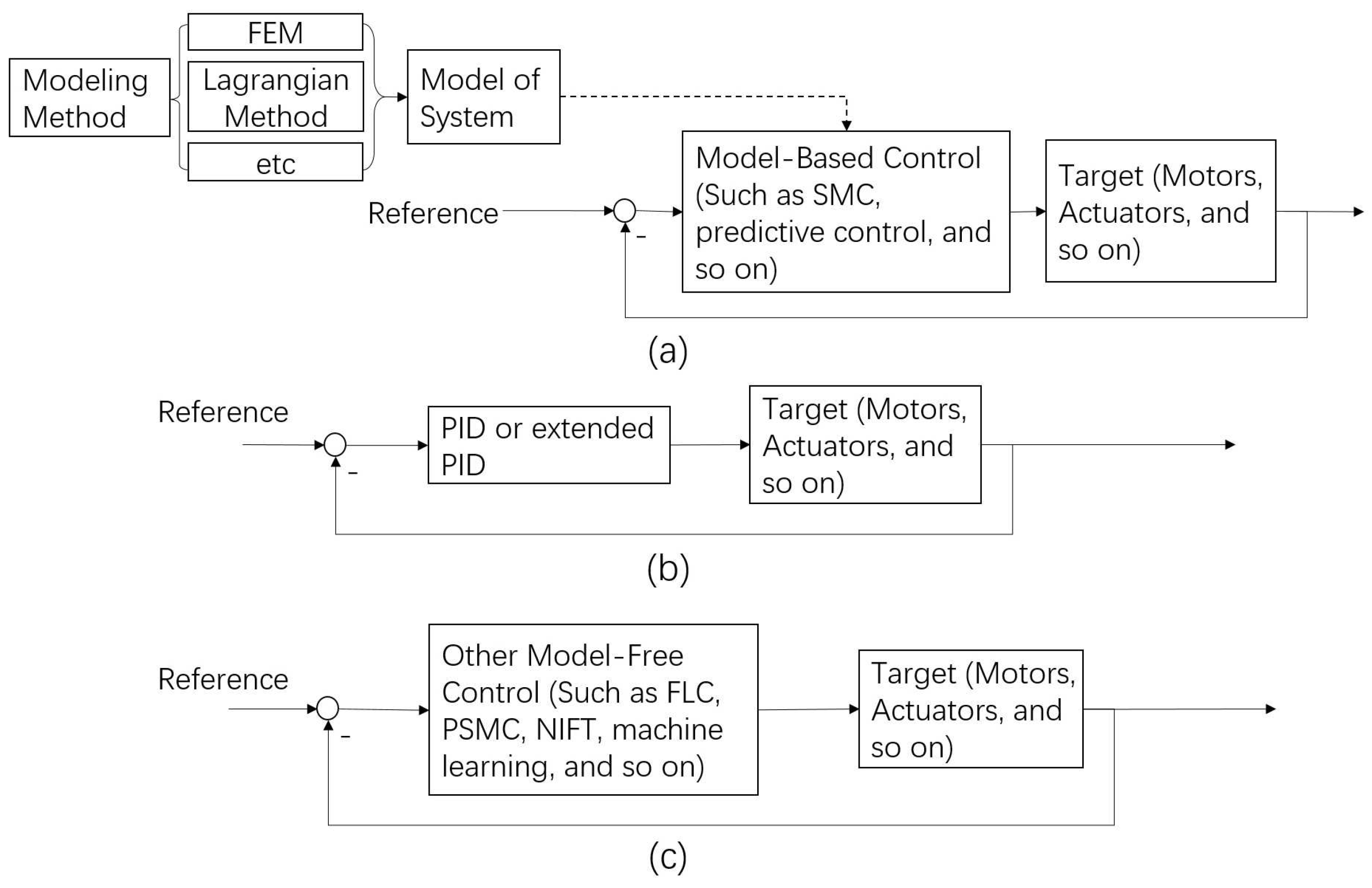
3.3. Summary of Modeling Methods and Control Strategies for Soft Rehabilitation and Nursing-Care Robots
4. Discussion and Outlook
5. Conclusions
Funding
Conflicts of Interest
References
- World Health Organization. Available online: https://www.who.int/disabilities (accessed on 19 April 2019).
- World Stroke Campaign. Available online: https://www.worldstrokecampaign.org (accessed on 19 April 2019).
- Díaz, I.; Gil, J.J.; Sánchez, E. Lower-limb robotic rehabilitation: Literature review and challenges. J. Robot. 2011, 2011, 1–11. [Google Scholar] [CrossRef]
- Lo, H.S.; Xie, S.Q. Exoskeleton robots for upper-limb rehabilitation: State of the art and future prospects. Med. Eng. Phys. 2012, 34, 261–268. [Google Scholar] [CrossRef] [PubMed]
- Gao, Z.; Shi, Q.; Fukuda, T.; Li, C.; Huang, Q. An overview of biomimetic robots with animal behaviors. Neurocomputing 2019, 332, 339–350. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shi, Q.; Li, C.; Li, K.; Huang, Q.; Ishii, H.; Takanishi, A.; Fukuda, T. A Modified Robotic Rat to Study Rat-Like Pitch and Yaw Movements. IEEE/ASME Trans. Mechatron. 2018, 23, 2448–2458. [Google Scholar] [CrossRef]
- Majidi, C. Soft robotics: A perspective—Current trends and prospects for the future. Soft Robot. 2014, 1, 5–11. [Google Scholar] [CrossRef]
- Costa, N.; Caldwell, D.G. Control of a biomimetic “soft-actuated” 10dof lower body exoskeleton. In Proceedings of the First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Pisa, Italy, 20–22 February 2006; pp. 495–501. [Google Scholar]
- Hussain, S.; Xie, S.Q.; Jamwal, P.K. Adaptive impedance control of a robotic orthosis for gait rehabilitation. IEEE Trans. Cybern. 2013, 43, 1025–1034. [Google Scholar] [CrossRef]
- Cao, J.; Xie, S.Q.; Das, R. MIMO sliding mode controller for gait exoskeleton driven by pneumatic muscles. IEEE Trans. Control Syst. Technol. 2017, 26, 274–281. [Google Scholar] [CrossRef]
- Neckel, N.; Wisman, W.; Hidler, J. Limb alignment and kinematics inside a Lokomat robotic orthosis. In Proceedings of the 2006 International Conference of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 30 August–3 September 2006; pp. 2698–2701. [Google Scholar]
- Munera, M.; Marroquin, A.; Jimenez, L.; Lara, J.S.; Gomez, C.; Rodriguez, S.; Rodriguez, L.E.; Cifuentes, C.A. Lokomat therapy in Colombia: Current state and cognitive aspects. In Proceedings of the International Conference on Rehabilitation Robotics, QEII Centre, London, UK, 17–20 July 2017; pp. 394–399. [Google Scholar]
- Holanda, L.J.; Silva, P.M.; Amorim, T.C.; Lacerda, M.O.; Simão, C.R.; Morya, E. Robotic assisted gait as a tool for rehabilitation of individuals with spinal cord injury: A systematic review. J. Neuroeng. Rehabil. 2017, 14, 126. [Google Scholar] [CrossRef]
- Gu, G.Y.; Zhu, J.; Zhu, L.M.; Zhu, X. A survey on dielectric elastomer actuators for soft robots. Bioinspir. Biomim. 2017, 12, 1–22. [Google Scholar] [CrossRef]
- Trivedi, D.; Rahn, C.D.; Kier, W.M.; Walker, I.D. Soft robotics: Biological inspiration, state of the art, and future research. Appl. Bionics Biomech. 2008, 5, 99–117. [Google Scholar] [CrossRef]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, 1–11. [Google Scholar] [CrossRef]
- Laschi, C.; Cianchetti, M. Soft robotics: New perspectives for robot bodyware and control. Front. Bioeng. Biotechnol. 2014, 2, 1–5. [Google Scholar] [CrossRef] [PubMed]
- Nd, D.M.; Fischer, S.A.; Gauthier, P.W.; Luna, C.H.; Clancy, E.A.; Fischer, G.S. A soft robotic exomusculature glove with integrated sEMG sensing for hand rehabilitation. In Proceedings of the 2013 IEEE International Conference on Rehabilitation Robotics, Seattle, WA, USA, 24–26 June 2013; pp. 1–7. [Google Scholar]
- Nycz, C.J.; Delph, M.A.; Fischer, G.S. Modeling and design of a tendon actuated soft robotic exoskeleton for hemiparetic upper limb rehabilitation. In Proceedings of the 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Milan, Italy, 25–29 August 2015; pp. 3889–3892. [Google Scholar]
- In, H.; Kang, B.B.; Sin, M.; Cho, K.J. Exo-glove: A wearable robot for the hand with a soft tendon routing system. IEEE Robot. Autom. Mag. 2015, 22, 97–105. [Google Scholar] [CrossRef]
- Kang, S.; In, H.; Cho, K.J. Design of a passive brake mechanism for tendon driven devices. Int. J. Precis. Eng. Manuf. 2012, 13, 1487–1490. [Google Scholar] [CrossRef]
- In, H.; Kang, S.; Cho, K.J. Capstan brake: Passive brake for tendondriven mechanism. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 2301–2306. [Google Scholar]
- In, H.; Lee, H.; Jeong, U.; Kang, B.B.; Cho, K.J. Feasibility study of a slack enabling actuator for actuating tendon-driven soft wearable robot without pretension. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 1229–1234. [Google Scholar]
- Vikas, V.; Cohen, E.; Grassi, R.; Sözer, C.; Trimmer, B. Design and locomotion control of a soft robot using friction manipulation and motor–tendon actuation. IEEE Trans. Robot. 2016, 32, 949–959. [Google Scholar] [CrossRef]
- Xiloyannis, M.; Cappello, L.; Khanh, D.B.; Yen, S.C.; Masia, L. Modelling and design of a synergy-based actuator for a tendon-driven soft robotic glove. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics, Singapore, 26–29 June 2016; pp. 1213–1219. [Google Scholar]
- Stilli, A.; Cremoni, A.; Bianchi, M.; Ridolfi, A.; Gerii, F.; Vannetti, F.; Wurdemann, H.A.; Allotta, B.; Althoefer, K. AirExGlove—A novel pneumatic exoskeleton glove for adaptive hand rehabilitation in post-stroke patients. In Proceedings of the 2018 IEEE International Conference on Soft Robotics, Livorno, Italy, 24–28 April 2018; pp. 579–584. [Google Scholar]
- Maghooa, F.; Stilli, A.; Noh, Y.; Althoefer, K.; Wurdemann, H.A. Tendon and pressure actuation for a bio-inspired manipulator based on an antagonistic principle. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 2556–2561. [Google Scholar]
- Wurdemann, H.A.; Stilli, A.; Althoefer, K. Lecture notes in computer science: An antagonistic actuation technique for simultaneous stiffness and position control. In Proceedings of the International Conference on Intelligent Robotics and Applications, Portsmouth, UK, 24–27 August 2015; pp. 164–174. [Google Scholar]
- Shiva, A.; Stilli, A.; Noh, Y.; Faragasso, A.; De Falco, I.; Gerboni, G.; Cianchetti, M.; Menciassi, A.; Althoefer, K.; Wurdemann, H.A. Tendon-based stiffening for a pneumatically actuated soft manipulator. IEEE Robot. Autom. Lett. 2016, 1, 632–637. [Google Scholar] [CrossRef]
- Stilli, A.; Wurdemann, H.A.; Althoefer, K. Shrinkable, stiffness-controllable soft manipulator based on a bio-inspired antagonistic actuation principle. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2476–2481. [Google Scholar]
- Stilli, A.; Wurdemann, H.A.; Althoefer, K. A novel concept for safe, stiffness-controllable robot links. Soft Robot. 2017, 4, 16–22. [Google Scholar] [CrossRef]
- Stilli, A.; Grattarola, L.; Feldmann, H.; Wurdemann, H.A.; Althoefer, K. Variable Stiffness Link (VSL): Toward inherently safe robotic manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 4971–4976. [Google Scholar]
- Guo, J.; Yu, S.; Li, Y.; Huang, T.H.; Wang, J.; Lynn, B.; Fidock, J.; Shen, C.L.; Edwards, D.; Su, H. A soft robotic exo-sheath using fabric EMG sensing for hand rehabilitation and assistance. In Proceedings of the 2018 IEEE International Conference on Soft Robotics, Livorno, Italy, 24–28 April 2018; pp. 497–503. [Google Scholar]
- Park, Y.L.; Chen, B.R.; Pérez-Arancibia, N.O.; Young, D.; Stirling, L.; Wood, R.J.; Goldfield, E.C.; Nagpal, R. Design and control of a bio-inspired soft wearable robotic device for ankle–foot rehabilitation. Bioinspir. Biomim. 2014, 9, 016007. [Google Scholar] [CrossRef]
- Park, D.; In, H.; Lee, H.; Lee, S.; Koo, I.; Kang, B.B.; Park, K.; Chang, W.S.; Cho, K.J. Preliminary study for a soft wearable knee extensor to assist physically weak people. In Proceedings of the 11th International Conference on Ubiquitous Robots and Ambient Intelligence, Kuala Lumpur, Malaysia, 2–15 Novmeber 2014; pp. 136–137. [Google Scholar]
- Kwon, J.; Park, J.H.; Ku1, S.; Jeong, Y.H.; Paik, N.J.; Park, Y.L. A soft wearable robotic ankle-foot-orthosis for post-stroke patients. IEEE Robot. Autom. Lett. 2019, 4, 2547–2552. [Google Scholar] [CrossRef]
- Ding, Y.; Galiana, I.; Asbeck, A.; Quinlivan, B.; De Rossi, S.M.M.; Walsh, C. Multi-joint actuation platform for lower extremity soft exosuits. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 1327–1334. [Google Scholar]
- Ding, Y.; Galiana, I.; Asbeck, A.T.; De Rossi, S.M.M.; Bae, J.; Santos, T.R.T.; de Araujo, V.L.; Lee, S.; Holt, K.G.; Walsh, C. Biomechanical and physiological evaluation of multi-joint assistance with soft exosuits. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 25, 119–130. [Google Scholar] [CrossRef] [PubMed]
- Bae, J.; De Rossi, S.M.M.; O’Donnell, K.; Hendron, K.L.; Awad, L.N.; Dos Santos, T.R.T.; De Araujo, V.L.; Ding, Y.; Holt, K.G.; Ellis, T.D.; et al. A soft exosuit for patients with stroke: Feasibility study with a mobile off-board actuation unit. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics, Singapore, 11–14 August 2015; pp. 131–138. [Google Scholar]
- Wehner, M.; Quinlivan, B.; Aubin, P.M.; Martinezvillalp, E.; Stirling, L.; Holt, K.; Wood, R.; Walsh, C. A Lightweight Soft Exosuit for Gait Assistance. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3362–3369. [Google Scholar]
- Asbeck, A.T.; Dyer, R.J.; Larusson, A.F.; Walsh, C.J. Biologically-inspired soft exosuit. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Seattle, WA, USA, 24–26 June 2013; pp. 1–8. [Google Scholar]
- Asbeck, A.T.; Rossi, S.M.M.D.; Galiana, I.; Ding, Y.; Walsh, C.J. Stronger, smarter, softer: Next-generation wearable robots. IEEE Robot. Autom. Mag. 2014, 21, 22–33. [Google Scholar] [CrossRef]
- Asbeck, A.T.; Schmidt, K.; Galiana, I.; Wagner, D. Multi-joint soft exosuit for gait assistance. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Asbeck, A.T.; Rossi, S.M.M.D.; Holt, K.G.; Walsh, C.J. A biologically inspired soft exosuit for walking assistance. Int. J. Robot. Res. 2015, 34, 744–762. [Google Scholar] [CrossRef]
- Rose, C.G.; O’Malley, M.K. Hybrid Rigid-Soft Hand Exoskeleton to Assist Functional Dexterity. IEEE Robot. Autom. Lett. 2019, 4, 73–80. [Google Scholar] [CrossRef]
- Caldwell, D.G.; Medrano-Cerda, G.A.; Goodwin, M. Control of pneumatic muscle actuators. IEEE Control Syst. 2002, 15, 40–48. [Google Scholar]
- Wakimoto, S.; Suzumori, K.; Kanda, T. Development of intelligent McKibben actuator. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar]
- Polygerinos, P.; Lyne, S.; Wang, Z.; Nicolini, L.F.; Mosadegh, B.; Whitesides, G.M.; Walsh, C.J. Towards a soft pneumatic glove for hand rehabilitation. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1512–1517. [Google Scholar]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef] [Green Version]
- Maeder-York, P.; Clites, T.; Boggs, E.; Neff, R.; Polygerinos, P.; Holland, D.; Stirling, L.; Galloway, K.; Wee, C.; Walsh, C. Biologically inspired soft robot for thumb rehabilitation. J. Med. Devices 2014, 8, 20933. [Google Scholar] [CrossRef]
- Polygerinos, P.; Galloway, K.C.; Savage, E.; Herman, M.; O’Donnell, K.; Walsh, C.J. Soft robotic glove for hand rehabilitation and task specific training. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 2913–2919. [Google Scholar]
- Zhang, J.; Wang, H.; Tang, J.; Guo, H.; Hong, J. Modeling and design of a soft pneumatic finger for hand rehabilitation. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 2460–2465. [Google Scholar]
- Guo, S.; Zhao, F.; Wei, W.; Guo, J.; Zhao, X.; Zhang, W. Soft actuator for hand rehabilitation. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Beijing, China, 2–5 August 2015; pp. 2197–2202. [Google Scholar]
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S. Power assistive and rehabilitation wearable robot based on pneumatic soft actuators. In Proceedings of the 2016 21st international conference on methods and models in automation and robotics, Miedzyzdroje, Poland, 29 August–1 September 2016; pp. 472–477. [Google Scholar]
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S. Wrist rehabilitation exoskeleton robot based on pneumatic soft actuators. In Proceedings of the 2016 International Conference for Students on Applied Engineering, Newcastle upon Tyne, UK, 20–21 October 2016; pp. 472–477. [Google Scholar]
- Huang, J.; Tu, X.; He, J. Design and evaluation of the RUPERT wearable upper extremity exoskeleton robot for clinical and in-home therapies. IEEE Trans. Syst. Man Cybern. Syst. 2015, 46, 926–935. [Google Scholar] [CrossRef]
- Zhao, H.; Jalving, J.; Huang, R.; Knepper, R.; Ruina, A.; Shepherd, R. A helping hand: Soft orthosis with integrated optical strain sensors and emg control. IEEE Robot. Autom. Mag. 2016, 23, 55–64. [Google Scholar] [CrossRef]
- Zhao, H.; Li, Y.; Elsamadisi, A.; Shepherd, R.F. Scalable manufacturing of high force wearable soft actuators. Extreme Mech. Lett. 2015, 3, 89–104. [Google Scholar]
- Zhao, H.; Huang, R.; Shepherd, R.F. Curvature control of soft orthotics via low cost solid-state optics. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 4008–4013. [Google Scholar]
- Yap, H.; Kamaldin, N.; Lim, J.; Nasrallah, F.; Goh, J.C.H.; Yeow, C.H. A magnetic resonance compatible soft wearable robotic glove for hand rehabilitation and brain imaging. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 25, 782–793. [Google Scholar] [CrossRef] [PubMed]
- Yap, H.K.; Khin, P.M.; Koh, T.H.; Sun, Y.; Liang, X.; Lim, J.H.; Yeow, C.H. A fully fabric-based bidirectional soft robotic glove for assistance and rehabilitation of hand impaired patients. IEEE Robot. Autom. Lett. 2017, 2, 1383–1390. [Google Scholar] [CrossRef]
- Luca, R.; Keong, A.B.W.; Chen-Hua, Y. Geometry-based customization of bending modalities for 3d-printed soft pneumatic actuators. IEEE Robot. Autom. Lett. 2017, 3, 3489–3496. [Google Scholar]
- Jiang, Y.; Chen, D.; Liu, P.; Jiao, X.; Ping, Z.; Xu, Z.; Li, J.; Xu, Y. Fishbone-inspired soft robotic glove for hand rehabilitation with multi-degrees-of-freedom. In Proceedings of the 2018 IEEE International Conference on Soft Robotics, Livorno, Italy, 24–28 April 2018; pp. 394–399. [Google Scholar]
- Jiang, Y.; Chen, D.; Que, J.; Liu, Z.; Wang, Z.; Xu, Y. Soft robotic glove for hand rehabilitation based on a novel fabrication method. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics, Macau, China, 5–8 December 2017; pp. 817–822. [Google Scholar]
- Ru, H.; Huang, J.; Chen, W.; Xiong, C.; Wang, J.; Huo, J. Design, modelling and identification of a fiber-reinforced bending pneumatic muscle. Sci. China Inf. Sci. 2019, 62, 50213. [Google Scholar] [CrossRef] [Green Version]
- O’Neill, C.T.; Phipps, N.S.; Cappello, L.; Paganoni, S.; Walsh, C.J. A soft wearable robot for the shoulder: Design, characterization, and preliminary testing. In Proceedings of the International Conference on Rehabilitation Robotics, London, UK, 17–20 July 2017; pp. 1672–1678. [Google Scholar]
- Irshaidat, M.A.E.; Soufian, M.; Al-Ibadi, A.; Nefti-Meziani, S. A novel elbow pneumatic muscle actuator for exoskeleton arm in post-stroke rehabilitation. In Proceedings of the 2nd IEEE International Conference on Soft Robotics, Seoul, Korea, 14–18 April 2019; pp. 630–635. [Google Scholar]
- Zhang, G.; Lin, M. Design of a Soft Robot Using Pneumatic Muscles for Elbow Rehabilitation. In Proceedings of the 3rd International Conference on Robotics and Automation Engineering, Guangzhou, China, 17–19 November 2018; pp. 14–18. [Google Scholar]
- Baiden, D.; Ivlev, O. Human-robot-interaction control for orthoses with pneumatic soft-actuators—Concept and initial trails. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Seattle, WA, USA, 24–26 June 2013. [Google Scholar]
- Meng, W.; Liu, Q.; Zhang, M.; Ai, Q.; Xie, S. Compliance adaptation of an intrinsically soft ankle rehabilitation robot driven by pneumatic muscles. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics, Munich, Germany, 3–7 July 2017; pp. 82–87. [Google Scholar]
- Cao, Y.; Huang, J.; Huang, Z.; Tu, X.; Mohammed, S. Optimizing Control of Passive Gait Training Exoskeleton Driven by Pneumatic Muscles Using Switch-Mode Firefly Algorithm. Robotica 2019. [Google Scholar] [CrossRef]
- Sun, Y.; Lim, C.M.; Tan, H.H.; Ren, H. Soft oral interventional rehabilitation robot based on low-profile soft pneumatic actuator. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 2907–2912. [Google Scholar]
- Sun, Y.; Song, Y.S.; Paik, J. Characterization of silicone rubber based soft pneumatic actuators. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4446–4453. [Google Scholar]
- Song, Y.S.; Sun, Y.; Van Den Brand, R.; Von Zitzewitz, J.; Micera, S.; Courtine, G.; Paik, J. Soft robot for gait rehabilitation of spinalized rodents. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 971–976. [Google Scholar]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brochu, P.; Pei, Q. Advances in dielectric elastomers for actuators and artificial muscles. Macromol. Rapid Commun. 2010, 31, 10–36. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef]
- Copaci, D.; Blanco, D.; Moreno, L. Wearable elbow exoskeleton actuated with Shape Memory Alloy in antagonist movement. In Proceedings of the Joint Workshop on Wearable Robotics and Assistive Devices, International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016; pp. 9–14. [Google Scholar]
- Villoslada, A.; Flores, A.; Copaci, D.; Blanco, D.; Moreno, L. High-displacement flexible shape memory alloy actuator for soft wearable robots. Robot. Auton. Syst. 2015, 73, 91–101. [Google Scholar] [CrossRef]
- Serrano, D.; Copaci, D.S.; Moreno, L.; Blanco, D. SMA based wrist exoskeleton for rehabilitation therapy. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 2318–2323. [Google Scholar]
- Copaci, D. Non-Linear Actuators and Simulation Tools for Rehabilitation Devices. Ph.D. Dissertation, Department Systems Engineering and Automation, Carlos III University, Madrid, Spain, 2017. [Google Scholar]
- Copaci, D.; Flores, A.; Rueda, F.; Alguacil, I.; Blanco, D.; Moreno, L. Wearable Elbow Exoskeleton Actuated with Shape Memory Alloy. In Converging Clinical and Engineering Research on Neurorehabilitation II; Springer: Cham, The Netherlands, 2017; pp. 477–481. [Google Scholar]
- Firouzeh, A.; Paik, J. Soft actuation and sensing towards robot-assisted facial rehabilitation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 306–313. [Google Scholar]
- Firouzeh, A.; Salerno, M.; Paik, J. Stiffness control with shape memory polymer in underactuated robotic origamis. IEEE Trans. Robot. 2017, 33, 765–777. [Google Scholar] [CrossRef]
- Firouzeh, A.; Paik, J. The design and modeling of a novel resistive stretch sensor with tunable sensitivity. IEEE Sens. J. 2015, 15, 6390–6398. [Google Scholar] [CrossRef]
- Amin, H.; Assal, S.F. Design Methodology of a Spring Roll Dielectric Elastomer-Based Actuator for a Hand Rehabilitation System. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation, Changchun, China, 5–8 August 2018; pp. 997–1002. [Google Scholar]
- Lidka, M.; Price, A.D.; Trejos, A.L. Development and Evaluation of Dielectric Elastomer Actuators for Assistive Wearable Devices. In Proceedings of the IEEE Canadian Conference on Electrical and Computer Engineering, Quebec City, QC, Canada, 13–16 May 2018. [Google Scholar]
- Runge, G.; Preller, T.; Zellmer, S.; Blankemeyer, S.; Kreuz, M.; Garnweitner, G.; Raatz, A. SpineMan: Design of a soft robotic spine-like manipulator for safe human–robot interaction. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 1103–1110. [Google Scholar]
- Banerjee, H.; Ren, H. Optimizing double-network hydrogel for biomedical soft robots. Soft Robot. 2017, 4, 191–201. [Google Scholar] [CrossRef] [PubMed]
- Yuk, H.; Lin, S.; Ma, C.; Takaffoli, M.; Fang, N.X.; Zhao, X. Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water. Nat. Commun. 2017, 8, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Kang, B.B.; In, H.; Cho, K.J. Modeling of tendon driven soft wearable robot for the finger. In Proceedings of the 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence, Jeju, Korea, 30 October–2 November 2013; pp. 459–460. [Google Scholar]
- Lau, H.; Tong, K. The reliability of using accelerometer and gyroscope for gait event identification on persons with dropped foot. Gait Posture 2008, 27, 248–257. [Google Scholar] [CrossRef] [PubMed]
- Xing, K.; Huang, J.; He, J.; Wang, Y.; Wu, J.; Xu, Q. Sliding mode tracking for actuators comprising pneumatic muscle and torsion spring. Trans. Inst. Meas. Control 2012, 34, 255–277. [Google Scholar] [CrossRef]
- Ding, F.; Huang, J.; Wang, Y.; Matsuno, T.; Fukuda, T. Vibration damping in manipulation of deformable linear objects using sliding mode control. Adv. Robot. 2014, 28, 157–172. [Google Scholar] [CrossRef]
- Huang, J.; Ri, S.; Fukuda, T.; Wang, Y. A disturbance observer based sliding mode control for a class of underactuated robotic system with mismatched uncertainties. IEEE Trans. Autom. Control 2019, 64, 2480–2487. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, M.; Ri, S.; Xiong, C.; Li, Z.; Kang, Y. High-Order Disturbance Observer Based Sliding Mode Control for Mobile Wheeled Inverted Pendulum Systems. IEEE Trans. Ind. Electron. 2019. [Google Scholar] [CrossRef]
- Yu, H.; Sun, Y.; Bai, F.; Ren, H. A preliminary study of force estimation based on surface EMG: Towards neuromechanically guided soft oral rehabilitation robot. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics, Singapore, 11–14 August 2015; pp. 991–996. [Google Scholar]
- Polygerinos, P.; Wang, Z.; Overvelde, J.T.; Galloway, K.C.; Wood, R.J.; Bertoldi, K.; Walsh, C.J. Modeling of soft fiber-reinforced bending actuators. IEEE Trans. Robot. 2015, 31, 778–789. [Google Scholar] [CrossRef]
- Huang, J.; Di, P.; Fukuda, T.; Matsuno, T. Dynamic modeling and simulation of manipulating deformable linear objects. In Proceedings of the 2008 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 5–8 August 2008; pp. 858–863. [Google Scholar]
- Huang, J.; Qian, J.; Liu, L.; Wang, Y.; Xiong, C.; Ri, S. Echo state network based predictive control with particle swarm optimization for pneumatic muscle actuator. J. Frankl. Inst. 2016, 353, 2761–2782. [Google Scholar] [CrossRef]
- Huang, J.; Cao, Y.; Xiong, C.; Zhang, H.T. An Echo State Gaussian Process-Based Nonlinear Model Predictive Control for Pneumatic Muscle Actuators. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1071–1084. [Google Scholar] [CrossRef]
- Meng, W.; Xie, S.Q.; Liu, Q.; Lu, C.Z.; Ai, Q. Robust iterative feedback tuning control of a compliant rehabilitation robot for repetitive ankle training. IEEE/ASME Trans. Mechatron. 2017, 22, 173–184. [Google Scholar] [CrossRef]
- Chi, R.; Hou, Z.; Jin, S.; Wang, D.; Hao, J. A data-driven iterative feedback tuning approach of ALINEA for freeway traffic ramp metering with PARAMICS simulations. IEEE Trans. Ind. Inform. 2013, 9, 2310–2317. [Google Scholar] [CrossRef]
- Hjalmarsson, H. Iterative feedback tuning—An overview. Int. J. Adapt. Control Signal Process. 2002, 16, 373–395. [Google Scholar] [CrossRef]
- Villoslada, Á.; Escudero, N.; Martín, F.; Flores, A.; Rivera, C.; Collado, M.; Moreno, L. Position control of a shape memory alloy actuator using a four-term bilinear PID controller. Sens. Actuators A Phys. 2015, 236, 257–272. [Google Scholar] [CrossRef] [Green Version]
- Firouzeh, A.; Salehian, S.S.M.; Billard, A.; Paik, J. An under actuated robotic arm with adjustable stiffness shape memory polymer joints. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 2536–2543. [Google Scholar]
- Firouzeh, A.; Salerno, M.; Paik, J. Soft pneumatic actuator with adjustable stiffness layers for multi-dof actuation. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 1117–1124. [Google Scholar]
- Firouzeh, A.; Paik, J. An under-actuated origami gripper with adjustable stiffness joints for multiple grasp modes. Smart Mater. Struct. 2017, 26, 055035. [Google Scholar] [CrossRef]
- Pathan, R.; Wang, H.; Rehman, H.U.; Butt, J.M.; Chen, Y. Design of Carbon Fiber Based Flexible Soft Heater for SMP Embedded Soft Actuators: A Step Towards Artificial Joints. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics, Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 1208–1213. [Google Scholar]
- Mutlu, R.; Alici, G.; Li, W. Electroactive polymers as soft robotic actuators: Electromechanical modeling and identification. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, NSW, Australia, 9–12 July 2013; pp. 1096–1101. [Google Scholar]
- Case, J.C.; White, E.L.; Kramer, R.K. Soft material characterization for robotic applications. Soft Robot. 2015, 2, 80–87. [Google Scholar] [CrossRef]
- Yap, H.K.; Ng, H.Y.; Yeow, C.H. High-force soft printable pneumatics for soft robotic applications. Soft Robot. 2016, 3, 144–158. [Google Scholar] [CrossRef]
- Noronha, B.; Dziemian, S.; Zito, G.A.; Konnaris, C.; Faisal, A.A. “Wink to grasp”—Comparing eye, voice & EMG gesture control of grasp with soft-robotic gloves. In Proceedings of the 2017 International Conference on Rehabilitation Robotics, London, UK, 17–20 July 2017; pp. 1043–1048. [Google Scholar]
- Nithya, V.S.; Arun, C.S. Brain controlled wearable robotic glove for cerebral palsy patients. In Proceedings of the 2017 International Conference on Circuit Power and Computing Technologies, Kollam, India, 20–21 April 2017; pp. 1–4. [Google Scholar]
- Runge, G.; Wiese, M.; Raatz, A. FEM-based training of artificial neural networks for modular soft robots. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Macau, China, 5–8 December 2017; pp. 385–392. [Google Scholar]
- Yang, G.; Deng, J.; Pang, G.; Zhang, H.; Li, J.; Deng, B.; Xie, H.; Yang, H. An IoT-enabled stroke rehabilitation system based on smart wearable armband and machine learning. IEEE J. Transl. Eng. Health Med. 2018, 6, 1–10. [Google Scholar] [CrossRef]
- Wilkening, A.; Ivlev, O. Adaptive model-based assistive control for pneumatic direct driven soft rehabilitation robots. In Proceedings of the 2013 IEEE 13th International Conference on Rehabilitation Robotics, Seattle, WA, USA, 24–26 June 2013; pp. 1–6. [Google Scholar]
- Patoglu, V.; Ertek, G.; Oz, O.; Zoroglu, D.; Kremer, G. Design requirements for a tendon rehabilitation robot: Results from a survey of engineers and health professionals. Soc. Sci. Electronic Publ. 2010, 307, 75–88. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robots | Aims | Assistance Capacity |
|---|---|---|
| Soft robotic exomusculature glove [19] | Providing help for the movement and coordination of gripping exercises | A maximum 15N grip assistive force in one DOF |
| Tendon actuated soft robotic exoskeleton for hemiparetic upper limb rehabilitation [20] | Providing assistance for patients in finger and elbow movements | |
| Exo-glove [21] | Providing rehabilitate for patients who cannot open or close hands but can use other joints of the upper limb | / for MCP/PIP ROM; 20N of pinch force; 76mm diameter of maximum gripping object |
| AirExGlove [27] | Suitable to provide rehabilitation to stroke patients affected scoring up to 3 in the MAS | Maximum diameter of graspable objects: 140 mm(100 Kpa), 190 mm (200 Kpa), 230 mm(200 Kpa) |
| Soft robotic exo-sheath for hand rehabilitation [34] | Providing rehabilitation and activities of daily living assistance for stroke and spinal cord injury patients | / / for MCP/ PIP/ DIP(palmar) |
| Bio-inspired soft wearable robotic device for ankle–foot rehabilitation [35] | Designed for ankle–foot rehabilitation and sagittal ankle motions | A range of for test subject‘s ankle |
| Soft wearable knee extensor [36] | Helping the physically weak people to walk | |
| Soft wearable robotic ankle-foot orthosis [37] | Providing assistance for ankle-foot-rehabilitation | A 70N assistive force in the test |
| Soft exosuit [40] | Provideing unilateral assistance during walking and improving patients’ gait symmetry and paretic limb progression | A positive effect on temporal symmetry and paretic limb propulsion |
| Hybrid rigid-soft hand exoskeleton [46] | Providing assistance and rehabilitation for patients with with neuromuscular impairment | / for MCP/PIP ROM |
| Robots | Aims | Assistance Capacity/Experimental Result |
|---|---|---|
| Soft pneumatic rehabilitation glove except thumb [49] | Designed for hand rehabilitation | 1.21/ 1.09/ 1.21/ 0.91N for PFA/ MFA/ RFA/ SFA (@43kPa); curling more than |
| Soft robotic rehabilitation glove [52] | Providing assisstance for individuals with functional grasp pathologies | a notable increase in the speed, precision and accuracy of the grasp for Box-and-Block test |
| Soft actuator [54] | Soft actuator for hand rehabilitation robots | About - bending angle |
| Soft pneumatic finger [53] | Helping patients bend and extend the disable hand in a large range of safety | Soft pneumatic finger can drive index finger to maximum bend angles |
| Power assistive and rehabilitation glove [55] | providing assistive force for griping and pinching movements | Maximum force up to 17N (@4bar); amplifying patient’s force up to 40% and 45% |
| Wrist rehabilitation exoskeleton [56] | Assisting patients with all wrist rehabilitation movements | 37N for wrist flexion movement, 55N for all other movements. |
| Soft orthosis with integrated optical strain sensors [58] | Developing a low-cost soft orthotic for hand rehabilitation | |
| Fully fabric-based bidirectional soft glove [62] | providing rehabilitation for hand impaired patients | (DIP), (PIP), (MCP) for index finger; (IP), (MCP), (CMC) for thumb |
| Fishbone-inspired soft robotic glove [64] | Providing assisstance for the Metacarpophalangeal (MCP) and the proximal interphalangeal (PIP) joints of human fingers to bend or extend independently | 100% of ROHM |
| Soft ankle rehabilitation robot [71] | Providing ankle rehabilitation for patients | PMA’s peak pulling force is up to 1000N |
| Low-profile soft pneumatic actuator [73] | Providing the treatments for for patients with mandibular mobility dysfunctions | A 40mm of elongation and around 20N force output |
| SMA based wrist exoskeleton [81] | Providing wrist rehabilitation therapies for patients | |
| Soft facial rehabilitation robots [84] | Helping patients to finish facial rehabilitation exercises |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, Z.; Huang, J. Soft Rehabilitation and Nursing-Care Robots: A Review and Future Outlook. Appl. Sci. 2019, 9, 3102. https://doi.org/10.3390/app9153102
Peng Z, Huang J. Soft Rehabilitation and Nursing-Care Robots: A Review and Future Outlook. Applied Sciences. 2019; 9(15):3102. https://doi.org/10.3390/app9153102
Chicago/Turabian StylePeng, Zengqi, and Jian Huang. 2019. "Soft Rehabilitation and Nursing-Care Robots: A Review and Future Outlook" Applied Sciences 9, no. 15: 3102. https://doi.org/10.3390/app9153102
APA StylePeng, Z., & Huang, J. (2019). Soft Rehabilitation and Nursing-Care Robots: A Review and Future Outlook. Applied Sciences, 9(15), 3102. https://doi.org/10.3390/app9153102